
MINDLAB, A WEB-ACCESSIBLE LABORATORY FOR ADAPTIVE
E-EDUCATIONAL ROBOT TELEOPERATION
P. Di Giamberardino, M. Span`o Cuomo and M. Temperini
Department of Computer and System Sciences, University of Rome ”La Sapienza”, Rome, Italy
Keywords:
WebLab, e-learning, Robot control, Teleoperation, Lego Mindstorms.
Abstract:
The paper deals with a web based remote access laboratory, called MindLab, for educational support, via e-
teaching and e-learning approaches, in practical robotic experiment to students of robotics and control theory
courses. The hardware components are based on commercial easy to use, cheap and modular Lego Mindstorms
devices. The software part, in addiction to the framework required for web access to the hardware resources,
is designed and implemented in order to allow the teacher to define particular didactic paths depending on
each student’s skills and on the desired final abilities to be acquired. Exercises are proposed following a
skill/competence level set, enabling higher levels access according to the results obtained. After a short de-
scription of the hardware setup, the software functionalities, mainly focusing on the exercise definition and
presentation aspects, are illustrated, giving also an example of a standard exercise. Concluding remarks end
the paper.
1 INTRODUCTION
A crucial aspect in both face to face and distance
learning is in the need for direct hands-on learning
experiences, conducted by the students in laboratory
(Traylor R.L., Heer D. and Fiez T.S., 2003; Gomes L.
and Bogosyan S., 2009).
Unfortunately, there are severe limitations in the
availability of sufficiently large and equipped labora-
tories to cover an access reasonably open to all the
needing students.
A remote environment would allow the students
to operate their experiments in distance, by managing
their queue and supporting the learning experience.
The effect is a more efficient sharing of the avail-
able resources and a potentially full time availability.
This advantage is often stressed in several applica-
tions (Gomes L. and Bogosyan S., 2009; L´opez D.,
Cedazo R., S´anchez F.M. and Sebastian J.M., 2009).
Implementing the networked solution by a web-
based application does have its merits (Gomes L. and
Bogosyan S., 2009; L´opez D., Cedazo R., S´anchez
F.M. and Sebastian J.M., 2009; Balestrino A., Caiti
A. and Crisostomi E., 2009), in that it allows easily
widespread availability of the exercise environment:
the ”communication environment” is basically a web-
browser; students can operate from home, directly; no
problem of installation of proprietary software on
students PC should occur.
Such support could be in the visualization of ex-
periment results, and in the provision of data for error
analysis; and it can be also less conventional, and ex-
tend to recording and personalizing the student activ-
ity (e.g. by adapting to the learner’s experience and
goals the list of accessible exercises).
We propose a web based system interfacing robots
for laboratory web-based activities. It supports learn-
ing activities in planning and control of autonomous
robotic devices; different robots, in different config-
urations, can be available (either at the same time,
in differently dressed areas of the laboratory, or in
series); the exercises are defined by the teacher and
specified to fit for certain learning goals and to certain
robot configurations: learning goals of an exercise are
specified in terms of difficulty to meet and compe-
tence to gain; paths of experiences are defined by the
teacher as a sequence of exercises that the student is
supposed to be able to perform at the end of the learn-
ing activity in the course; each learner is associated to
a profile that is maintained during her/his activity: ex-
ercises are listed as available to the given learner only
if the her/his profile according to the exercise’s learn-
ing goals; after an exercise has been completed by the
learner, her/his profile is updated by the skills gained
from the learning goals and new exercises in the path
are possibly made available.
309
Di Giamberardino P., Spanò Cuomo M. and Temperini M. (2010).
MINDLAB, A WEB-ACCESSIBLE LABORATORY FOR ADAPTIVE E-EDUCATIONAL ROBOT TELEOPERATION.
In Proceedings of the 7th International Conference on Informatics in Control, Automation and Robotics, pages 309-314
DOI: 10.5220/0002953303090314
Copyright
c
SciTePress

The laboratory is located at the Faculty of Infor-
mation Engineering of Sapienza University, in the
premises of Latina, and it can be reached at the web
address http://infocli31.dislt.uniroma1.it/webRobot/,
where at present, due to its current use, only a Ital-
ian language version is available.
The main contribution is related to the particular
software design which gives the possibility of specific
didactic paths construction, tailored on each student
initial skills and desired learning goals.
In the most recent literature, several examples of
web based laboratories are illustrated. As evidenced
in (Garc´ıa–Zubia J., Ordu˜na P., L´opez–de–Ipi˜na D.
and Alves G.R., 2009), the most of them put their
main attention in the hardware aspects, banishing the
software to a little more than a mere communication
interface.
A wide analysis of the state of the art in remote
laboratories is performed in (Gomes L. and Bogosyan
S., 2009), where a first simplified classification of
local/remote and simulated/hands-on experiments is
given, and some benefits are evidenced.
Several applications of virtual and augmented re-
ality have been known to have some didactic usage,
such as in (Kosuge K., Kikuchi J. and Takeo K., 2002;
Mar´ın R., Sanz P.J., Nebot P. and Wirz R., 2005). An
application of remote accessibility of an experimen-
tal lab for student with disabilities is in (Colwell C.,
Scanlon E. and Cooper M., 2002). iLab (Lerman S.
and del Alamo J., 2000-2005) makes accessible labo-
ratories developed at MIT.
Regarding the interaction between remotely avail-
able laboratories and distance learning services,
(Chellali R., Dumas C., Mollet N. and Subileau G.,
2009) laments that the problems, in making complex
systems available through e-learning, are rather con-
ceptual than technical.
(Borgolte U., 2009) presents the architecture of
a remotely operable laboratory with a mobile robot,
used for education. Programming is done in COL-
BERT, offering quasi-parallel execution of activities.
In (Casini M., Prattichizzo D. and Vicino A.,
2004) Automatic Control Telelab is presented, as a
web-based (through java applet technology) system,
allowing to put on-line a series of experiences in vari-
ous fields of automation and control. Students have
access, through the “experiment interface”, to the
graphically and video rendered outputs of the exper-
iment. There are several experimental settings, and
an additional field related to LEGO Mindstorm is an-
nounced.
A survey on Web technologies used in control
systems courses can be found in (Poindexter S. E.
and Heck B. S., 1999), where the authors describe
the use of virtual (Merrick C. M. and Ponton J. W.,
1996; Schmid C., 1998) and remote labs. A distin-
guishing feature of remote labs as compared to vir-
tual labs is that users can interact with real physical
processes through the Internet, making them more at-
tractive than controlling software simulations. At the
same time, the design and implementation of a remote
lab is more challenging due to safety and fault toler-
ant aspects.
In (Jara C. A., Candelas F. A. and Torres F., 2008)
an environment for remote operation and simulation
for a robot arm is described. It uses easy java simula-
tion for the applet-based graphical interface, making
it necessary on the local PC only a web browser and
java+java3D runtime system. A dedicated and expen-
sive robot is made available.
(L´opez D., Cedazo R., S´anchez F.M. and Sebas-
tian J.M., 2009) describes a web accessible exper-
imental setup for embedded real time systems pro-
gramming for a robot arm. Free software is used both
for client and for server applications. The hardware
setup is fixed and the different sessions propose dif-
ferent tasks to be executed by the robot arm; the tested
skill is the ability of produce a correct and functional
program for executing the given task.
The here presented remote laboratory, MindLab,
has been designed and built up focusing on the possi-
bility of a quite flexible and configurable exercise set-
tings, where three main components - configurations
of robots, experiment areas, exercises definitions - of
the remote learning activities can be accommodated
in varied manners: different robot(s) configurations
can be defined, different playground(s) settings can
be arranged and (clusters of) exercises can be defined
according to specific robot and layout configurations.
Our system provides a quite simple-to-use envi-
ronment supporting programming and experimenting
on Lego Mindstorms robots, a family of commercial
robots which is widely available, reasonably sophisti-
cated in terms of functions, pretty easy to use and suf-
ficiently affordable in terms of cost. Moreover, being
intrinsically modular in terms of sensors and actuators
number and distribution, is is easily and quickly re-
configurable and several different configurations can
be obtained starting from the same set of devices.
In MindLab, though, the main issue we worked
on so far is in giving rise to a truly e-learning frame-
work, capable to support methodologically and ped-
agogically sound distance activities, and in partic-
ular personalized and adaptive management of the
learner’s experience (Fernandez, G., Sterbini, A. and
Temperini, M., 2007; Limongelli, C., Sciarrone, F.,
Temperini, M., and Vaste, G., 2009; Sterbini, A. and
Temperini, M., 2009; Limongelli, C., Sciarrone, F.,
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
310

Temperini, M., and Vaste, G., 2010).
2 THE MINDLAB FRAMEWORK
MindLab is basically a web-application running on
a server resident into a small laboratory: the server
can access, via bluetooth connection, the robots, as
instructed by the application. The communication
scheme is depicted in Figure 1
Figure 1: Communication scheme in MindLab.
The system allow to make exercises with robots
based on the LEGO Mindstorms NXT technology.
This choice has been driven by the idea that such a
system could give sufficient flexibility to the labo-
ratory experimental layouts, besides being economi-
cally feasible and allowing to use and maintain sev-
eral robots.
To program the robot, the support can be based
on graphical interfaces, such as in NXT-G, Robo-
lab, and NI LabVIEW Toolkit, or on the use of a
plain programming language, such as C, C++, URBI,
leJOS, NXC, NBC. The original firmware included
in the “brick” NXT does support only the last two
languages; all the other systems need a dedicated
firmware to replace the original.
Then, a first issue was in the possibility to replace
the original firmware of the brick by a new one, more
extended and complex. The reward in that replace-
ment was in the possibility to get total control of the
hardware, import algorithms (e.g. from artificial intel-
ligence disciplines) more easily and enjoy better per-
formances. A second issue for decisions was in the
programminglanguage to be supported by the system.
As of the former issue, we thought that full control
could also make it necessary to display higher level of
programming skills and to deal with less predictable
and tractable programming errors.
Then, the decision to limit programming skills
and freedom and maintain the original firmware was
adopted.
Regarding the latter issue, another constraint in
our project was the will to make an additional inter-
face available to input pseudo-code, rather than plain
programming code. The pseudo-code (that is a more
straightforward way to specify the robot behavior,
expressed through system supported menus of com-
mands) would then be translated in the programming
language supported by the system before processing
its execution. This would allow for a lower/simpler
interaction level between student and system: it can
be useful at initial stages. At a higher level of stu-
dent skills and responsibility, direct input of plain pro-
gramming code is also possible. So one of the factors
in our choice of the programming language supported
by the system was in having it to be the target for
pseudo-code translation. These considerations bring
us to selected Not Exactly C (NXC). NXC is an high
level programming language deriving from the NBC
(Next Bytes Code, used in previous LEGO technology
RXC)
Communication between server and Bricks can be
based both on a cabled USB connection and on a wire-
less Bluetooth one.
To complete the hardware architecture, a webcam
based system for the remote visualization of the run-
ning experiment is included.
3 THE EXERCISES
ENVIRONMENT
The system can manage several courses; each course
is an environment in which paths of exercises are de-
fined, to reach determined skills.
An exercise is defined by specifying the robot lay-
out for its execution and two cognitive aspects: diffi-
culty degree and competence level (both are numbers
in [1,5]; the latter represents the skills that are demon-
strated/gained by solving the exercise).
Each course have several students enrolled, and
one or more teachers responsible.
An administrator manage the system, e.g. grant
to certain users teacher privileges, create new courses
and assign their teachers, configure exercise assess-
ment and execution ways, browse the log file contain-
ing records of the system activities, and configure in
the system the robots that are available on the ground
(basically asserting the physical robot configuration
in terms of sensors and engines attached.
The students enrolled in a course have access to
the list of exercises they can perform in that course,
and to the records of performed exercises. A stu-
dent can perform and exercise if the related difficulty
and competence level are sufficiently close to her/his
skills. A learner’s skills are represented through a
model, constituted directly by the records of the ex-
ercises previously solved by the learner.
To solve an exercise, the student devises a com-
puter program (either directly, in NXC, or by listing
its pseudo-code through and assistive interface), and,
MINDLAB, A WEB-ACCESSIBLE LABORATORY FOR ADAPTIVE E-EDUCATIONAL ROBOT TELEOPERATION
311
after being entitled to access an available robot, inputs
the program and sees the results. As a matter of facts,
exercise assessment is just semi-automatic: the final
judgment is stated by the teacher, that can declare the
exercise solved to grant the learner with the related
difficulty and competence levels.
Then, the teachers monitor and assess the exer-
cises performed by their courses’ students.
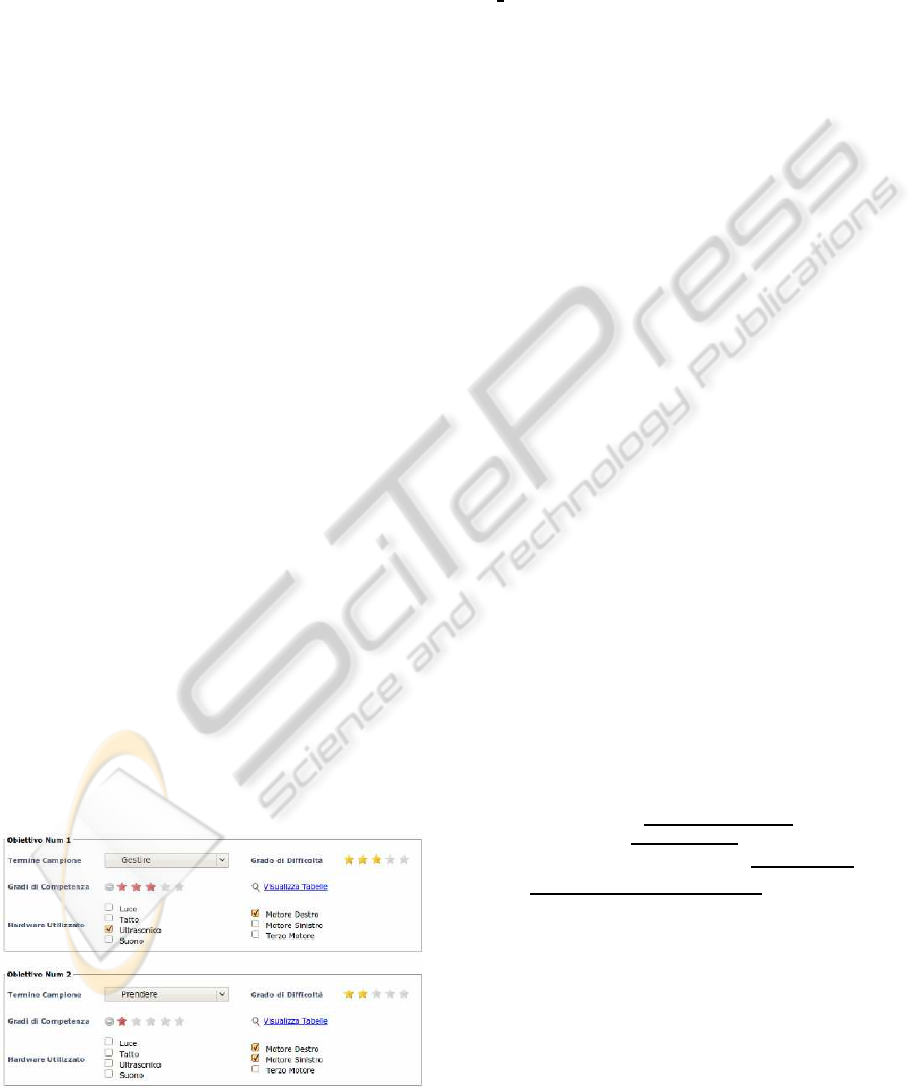
Moreover they specify new exercises. Figure 2
shows part of the definition interface. Here the less
straightforward among the data managed by the sys-
tem to define an exercise: ROBOT CONFIGURATION
for the exercise, selected among those defined by the
administrator, corresponding to the machine actually
available in the lab; HARDWARE SPECIFICATION, i.e.
the set of devices (sensors and actuators) that are sup-
posed to be needed for the exercise (and so present in
the robot configuration); DIFFICULTY degree, meant
to express how challenging, in terms of coordina-
tion and complexity of the control, the endeavor can
be; it’s an integer number ∈ [1, . . . , 5]; COMPETENCE
level that is supposed to be shown in solving the ex-
ercise; it’s a number as above. Note that this is not a
prerequisite: it is more similar to the certification of a
learner’s cognitive level (cf. Bloom, 1964) granted by
the learning activity associated to the exercise.
There is one more part in an exercise definition,
and it is very important: the activity is definitely spec-
ified by listing a set of objectives, sort of sub-tasks for
the whole activity. Although such segmentation could
be pedagogically useful in providing an order of ac-
tion for the students, it is not particularly stressed in
the syste: As a matter of facts, it is over the objec-
tives that the teacher, with the system’s assistance,
actually states the difficulty and competence levels,
and the hardware specifications. Then, the exercise is
the summa of the sub-tasks (its levels are the highest
among the objectives’ ones, and its hardware is the
union of the objectives’ requests).
The definition interface for objectives is in Figure
2.
Figure 2: Two objectives in the definition of an exercise.
To help teachers in assigning difficulty levels to ob-
jectives a table of correspondence between keywords
and levels is available. For instance, keywords such
as “Turn+DIRECTION” or “Stop” are given auto-
matically difficulty 1; ”Measure” is level 3; “Look-
ing For” is level 4. Presently we have 30 keyword
(distributed in the 5 levels) in the table. The teacher
is also provided with a set of accompanying recom-
mendations related to the pedagogycal interpretation
of the keywords/levels; e.g. if the objective requires
to “manage different types of movements”it will have
at least a classification 2 of difficulty.
Competence levels basically express program-
ming capabilities and the knowledge and solution of
typical problems. In order to mark such level in an
objective the teacher is required to peruse an help ta-
ble, specifying at the moment, some remark about
each level and 20 indications on the levels, overall.
For instance, basic knowledge of sensors and engines,
basic terminology, basic movements, are the indica-
tions matchable in cognitive level 1; at level 4, in-
stead, capabilities such as “knowledge of the hard-
ware elements and ability to let it interact”, “capabil-
ity to use all the programming commands supported
in MindLab”; while a level 5 capability is “knowledge
of MindLab commands limits”.
Keywords and recommendations are not fixed
once and for all; we think that different courses
(meaning exercises cycles) and teachers might require
different descriptions for the levels of difficulty and
competence. So, keywords and recommendations in
the system are actually completely reconfigurable and
expandable, also at the level of the single course (and
related teacher). We think this can help avoiding to
frame everybody in a predefined pedagogical format,
and increase teacher comfort in the system.
3.1 An Example of Exercise
TEXT OF THE EXERCISE
The robot should follow a black line on the floor.
At line end, it has to check around for obstacles closer
than 15cm. If no obstacle is seen, emit a sound, oth-
erwise measure the intensity of light reflected by the
floor and output it.
OBJECTIVES
An analysis of the text (we underlined significant
segments) helps defining the objectives of the exer-
cise. They are enumerated in the following, giving
keyword, difficulty (D) and Competence level (C): Fol-
low a Line, D = 3; C = 3; Check (for obstacle), D = 4,
C = 4; Emit Sound, D = 1, C = 2; Measure, D = 3, C
= 3.
So the exercise has four objectives and a overall
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
312

qualification of: Difficulty = 4; Competence = 4.
3.2 Solving an Exercise
Figure 3 shows the student interface for exercises.
Exercises whose solution the student can attempt are
pointed out by a green dot. Those exercises for which
the learner submitted a solution are also pointed out,
to mean whether they have been accepted or rejected
by the teacher, or their assessment is pending. Exer-
cises that are defined with hardware requirements not
matching an available robot configuration would be
pointed out (not in figure).
Figure 3: The learner’s interface to exercises. The first in
list has D = 1 and C = 1. The second was attempted and is
pending assessment. The others are not yet available since
their Ds and Cs are not yet suffciently close to the leraner’s
profile. When the submitted exercise will be accepted, the
profile will increase to D = 1 and C = 2. This will make
exercises with D ≤ 2 and C ≤ 3 available to the learner.
From here the student can access the solution in-
terface for the selected exercise, and submit a pro-
gram proposal in two ways.
The first way is to use a very plain interface,
allowing to just paste the program and sending it
along. At this stage only compiler-related feedbacks
are available (if the program compiles well, it is
send to the selected robot for execution). There is
no simulation-baed check at this stage, to prevent
patently wrong programs to execute, nor recovery
programs are set into the system to let the robot re-
turn to a safe position afetr an unfortunateexperiment.
This is an operative lack in the system so far.
The second way to submit a solution is through a
pseudo-code subsystem, that allow the student to de-
velop the program in a guided manner, by specify-
ing the sequence of movements and actions through
menus and parameter sub-panels (Figure4).
Figure 4: The pseudo-code interface. Menus allows to se-
lect the operations to list in the program. For certain op-
eration a sub-panel opens up, to allow the setting of due
parameters.
4 CONCLUSIONS
The paper has shown design and implementation as-
pects of the system MindLab, a web application
supporting remote operation of LEGO Mindstorms
robots for e-teaching and e-learning activities. The
choice of such commercial hardware makes, without
prejudice for the flexibility and the learning effective-
ness, pretty affordable the task of making a laboratory
available to distance learning, also in cases when the
economic resources of a school are limited.
Our approach imports, in such a didactic teleop-
eration setting, our experience in the field of per-
sonalized and adaptive e-learning. In each course
the teacher can define an exercising-learning path of
mandatory exercises; the learner, then, can approach
only those exerciseswhose pedagogical specifications
are sufficiently close to the present cognitive state of
the learner.
We have several robots available to remote exer-
cising at the same time, both in separated environ-
ments (where different students can can operate with
different robots in different portions of the laboratory,
and for collaborative exercises with coordinated ma-
chines.
We have remarked the flexibility of the (small) ex-
ercise environment, with the possibility to define var-
ious layouts for different tasks, and the system capa-
bility to manage different robots, each one with its
configuration, for different exercises. And we have
pointed out some lacks in the present implementation
of the system, namely the absence of any simulation
devices (that could avoid execution of wrong plans)
MINDLAB, A WEB-ACCESSIBLE LABORATORY FOR ADAPTIVE E-EDUCATIONAL ROBOT TELEOPERATION
313

and the scarce recovery mechanisms to enact in case
of execution of such wrong programs, or other acci-
dents.
In terms of future work we plan to remedy to the
abovementioned lack, by equipping the system with
dedicated modules. There are some other lines de-
velopment: one is the definition of a more accurate,
yet not more cumbersome, method to define the ped-
agogical characterization of an exercise; a second line
of research is the definition of a more permanent stu-
dent model, such as it is not entirely initialized when
a new course is endeavored by the learner.
From an adaptive-e-learning point of view, then,
we will try to formalize and implement a framework
in which the sequence of exercises for a student, is
configured according to the learner’s individual cog-
nitive state and learning goals, and possibly changed
(i.e. adapted) during the course activity, responding
to changes in the student model.
REFERENCES
Traylor R. L., Heer D. and Fiez T. S. (2003). Using an Inte-
grated Platform for Learning to Reinvent Engineering
Education. IEEE Transactions on Educations. Vol.
46, No. 4, pp. 409–419.
Gomes L. and Bogosyan S. (2009). Current Trends in Re-
mote Laboratories. IEEE Transactions on Industrial
Electronics. Vol. 56, No. 12, pp. 4744–4756.
L´opez D., Cedazo R., S´anchez F.M. and Sebastian J.M.
(2009). Ciclope Robot: Web–Based System to
Remote Program an Embedded Real–Time System.
IEEE Transactions on Industrial Electronics. Vol. 56,
No. 12, pp. 4791–4797.
Balestrino A., Caiti A. and Crisostomi E. (2009). From Re-
mote Experiments to Web–Based .Learning Objects:
An Advanced Telelaboratory for Robotics and Con-
trol Systems. IEEE Transactions on Industrial Elec-
tronics. Vol. 56, No. 12, pp. 4817–4825.
Garc´ıa–Zubia J., Ordu˜na P., L´opez–de–Ipi˜na D. and Alves
G.R. (2009). Addressing Software Impact in the De-
sign of Remote Laboratories. IEEE Transactions on
Industrial Electronics. Vol. 56, No. 12, pp. 4757–
4767.
Kosuge K., Kikuchi J. and Takeo K. (2002). VISIT: A tele-
operation system via the computer network. Beyond
Webcams:an introduction to online robots. MIT Press,
pp. 215–220.
Mar´ın R., Sanz P. J., Nebot P. and Wirz R. (2005). A Multi-
modal Interface to Control a Robot Arm via the Web:
A Case Study on Remote Programming. IEEE Trans-
actions on Industrial Electronics. Vol. 52, pp. 1506–
1520.
Colwell C., Scanlon E. and Cooper M. (2002). Using re-
mote laboratories to extend access to science and en-
gineering. Computers & Education. Vol. 38, pp. 65–
76.
Lerman S. and del Alamo J. (2000-2005) iLab: Re-
mote Online Laboratories. [Online]. available:
http://icampus.mit.edu/projects/iLabs.shtml.
Chellali R., Dumas C., Mollet N. and Subileau G. (2009).
SyTroN: A Virtual Classroomfor Collaborative and
Distant E-Learning Systemby Teleoperating Real De-
vices. International Journal of Computer Games
Technology. Vol. 2009, doi:10.1155/2009/627109.
Hindawi.
Borgolte U. (2009). Interface design of a virtual labora-
tory for mobile robot programming. In Mndez-Vilas,
A., Solano Martn, A. , Mesa Gonzlez, J.A. and Mesa
Gonzlez, J. (Eds.) Proceedings of the m-ICTE2009 Int.
Conf. on Research, Reflections and Innovations in In-
tegrating ICT in Education. 22-24 Apr. 2009, Lisbon,
Portugal. Vol. 1. ISBN 978-84-692-1789-4. FORMA-
TEX, Badajoz, Spain.
Casini M., Prattichizzo D. and Vicino A. (2004). The Au-
tomatic Control Telelab. A Web-based technology for
Distance Learning. IEEE Control Systems Magazine.
Vol. 24, No. 3, pp. 36–44.
Poindexter S. E. and Heck B. S. (1999). Using the Web
in your courses: What can you do? What should you
do?. IEEE Control Systems Magazine. Vol. 19, No. 1,
pp. 83–92.
Merrick C. M. and Ponton J. W. (1996). The ECOSSE con-
trol hypercourse. Comput. Chem. Eng.. Vol. 20, sup.,
No. 972, pp. S1353-S1358.
Schmid C. (1998). The virtual lab VCLAB for education
on the Web. in Proc. American Control Conference.
Philadelphia, PA, pp. 1314-1318.
Jara C. A., Candelas F. A. and Torres F. (2008). Vir-
tual and Remote Laboratory for Robotics ELearn-
ing. in Proceedings 18th European Symposium on
Computer Aided Process Engineering ESCAPE 18,
Braunschweig B. and Joulia X. (Eds). Elsevier.
Fernandez, G., Sterbini, A. and Temperini, M. (2007).
Learning Objects: A Metadata Approach. In Proc.
IEEE Region 8 Eurocon 2007 Conference. Warsaw,
Poland.
Limongelli, C., Sciarrone, F., Temperini, M., and Vaste, G.
(2009). Adaptive Learning with the LS-Plan System:
A Field Evaluation. IEEE Trans. Learning Technolo-
gies. Vol.2, No. 3, pp.203–215.
Sterbini, A. and Temperini, M. (2009). Adaptive Construc-
tion and Delivery of Web-Based Learning Paths. In
Proc. 39th ASEE/IEEE Frontiers in Education Con-
ference. San Antonio, TX, USA.
Limongelli, C., Sciarrone, F., Temperini, M., and Vaste, G.
(2010). The Lecomps5 Framework for Personalized
Web-Based Learning: a Teacher’s Satisfaction Per-
spective. Computers in Human Behaviour, Elsevier,
to appear.
Bloom, B. S. (1964). Taxonomy of Educational Objectives.
David McKay Company Inc.
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
314
