
ANYTIME MODELS IN FUZZY CONTROL
Annamária R. Várkonyi-Kóczy, Attila Bencsik
Institute of Mechatronics, Óbuda University, Népszínház u 8, H-1081 Budapest, Hungary
Antonio Ruano
Faculty of Science & Technology, University of Algarve, Campus de Gambelas, 8005 -139 Faro, Portugal
Keywords: Power plant control, Intelligent control, Situational control, Anytime modeling, Fuzzy modeling,
SVD based complexity reduction, Time critical systems, Resource insufficiency.
Abstract: In time critical applications, anytime mode of operation offers a way to ensure continuous operation and to
cope with the possibly dynamically changing time and resource availability. Soft Computing, especially
fuzzy model based operation proved to be very advantageous in power plant control where the high
complexity, nonlinearity, and possible partial knowledge usually limit the usability of classical methods.
Higher Order Singular Value Decomposition based complexity reduction makes possible to convert
different classes of fuzzy models into anytime models, thus offering a way to combine the advantages, like
low complexity, flexibility, and robustness of fuzzy and anytime techniques. By this, a model based
anytime control methodology can be suggested which is able to keep on continuous operation using non-
exact, approximate models of the plant, thus preventing critical breakdowns in the operation. In this paper,
an anytime modeling method is suggested which makes possible to use complexity optimized fuzzy models
in control. The technique is able to filter out the redundancy of fuzzy models and can determine the near
optimal non-exact model of the plant considering the available time and resources. It also offers a way to
improve the granularity (quality) of the model by building in new information without complexity
explosion.
1 INTRODUCTION
Nowadays, solving control problems model-
integrated computing has become very popular. This
integration means that the available knowledge is
represented in a proper form and acts as an active
component of the procedure to be executed during
the operation.
For linear problems, well established methods
are available and they have been successfully
combined with adaptive techniques to provide
optimum performance.
In case of nonlinear techniques, fuzzy modeling
seems to result in a real breakthrough even when no
analytical knowledge is available about the system,
the information is uncertain or inaccurate, or when
the available mathematical form is too complex to
be used. Although, major limitation of fuzzy models
is their exponentially increasing complexity. An
especially critical situation is, when due to failures
or an alarm appearing in the modeled system, the
required reaction time is significantly shortened and
one has to make decisions before the needed and
sufficient information arrives or the processing can
be completed.
In such cases, anytime techniques can be applied
advantageously to carry on continuous operation and
to avoid critical breakdowns. Anytime systems are
able to provide short response time and are able to
maintain the information processing even in cases of
missing input data, temporary shortage of time, or
computational power (Zilberstein, 1996). The idea is
that if there is a temporal shortage of computational
power and/or there is a loss of some data, the actual
operations should be continued to maintain the
overall performance “at lower price”, i.e.,
information processing based on algorithms and/or
models of simpler complexity (and less accuracy)
should provide outputs of acceptable quality to
continue the operation of the complete system.
213
R. Várkonyi-Kóczy A., Bencsik A. and Ruano A. (2010).
ANYTIME MODELS IN FUZZY CONTROL.
In Proceedings of the 7th International Conference on Informatics in Control, Automation and Robotics, pages 213-220
DOI: 10.5220/0002966102130220
Copyright
c
SciTePress

There are a few approaches aiming to exploit the
advantages of anytime control however mostly in the
field of linear control. To mention two of the
characteristic approaches, Fontanelli at al. 2008
applies a hierarchical anytime control design
strategy with stochastic scheduling conditioning
resulting in usually acceptable worst-case execution
time and almost sure stability while Battacharya et
Balas 2004 uses balanced truncation and
residualization of models to generate a set of
reduced-order controllers in order to ensure smooth
switching between the truncated models.
There are mathematical tools, like Singular
Value Decomposition (SVD), which offer a
universal scope for handling the complexity problem
by anytime operations. SVD proved to be very
advantages at different fields of (linear) control, like
receding horizon control (RHC) where the
application of the technique may offer a sub-optimal
control strategy, see e.g. Rojas et al. 2004.
Embedding fuzzy models in anytime systems
extends the advantages of the Soft Computing (SC)
approach with the flexibility with respect to the
available input information and computational
power.
In this paper, we deal with the applicability of
fuzzy models in dynamically changing, complex,
time-critical, anytime systems. The analyzed models
are generated by using (Higher Order) Singular
Value Decomposition ((HO)SVD). This technique
provides a uniform frame for a family of modeling
methods and results in low (optimal or nearly
optimal) computational complexity, easy realization,
and robustness. The accuracy can also easily and
flexibly be increased, thus both complexity
reduction and the improvement of the approximation
can be implemented.
The paper is organized as follows: In Section 2
the generalized idea of anytime processing is
introduced. Section 3 summarizes the basics of
Singular Value Decomposition. Section 4 is devoted
to the SVD based complexity reduction and density
improvement of fuzzy models. Section 5 briefly
deals with anytime fuzzy control. Finally, in Section
6, conclusions are drown.
2 ANYTIME PROCESSING
In recourse, data, and time insufficient conditions,
anytime algorithms, models, and systems
(Zilberstein, 1996) can be used advantageously.
They are able to provide guaranteed response time
and are flexible with respect to the available input
data, time, and computational power. This flexibility
makes these systems able to work in changing
circumstances without critical breakdowns in the
performance. The main goal of anytime systems is to
keep on the continuous, near optimal operation
through finding a balance between the quality of the
processing and the available resources.
Iterative algorithms/models are popular tools in
anytime systems, because their complexity can
easily and flexibly be changed. These algorithms
always give some, possibly not accurate result and
more and more accurate results can be obtained, if
the calculations are continued. When the results are
needed, by simply stopping the calculations, the, in
the given circumstances best results are got.
Unfortunately, the usability of iterative
algorithms is limited. Because of this limitation, a
general technique for the application of a wide range
of other types of models/ computing methods in
anytime systems has been suggested in Várkonyi-
Kóczy, et al. 2001, however at the expense of lower
flexibility and a need for extra planning and
considerations.
3 SINGULAR VALUE
DECOMPOSITION
SVD has successfully been used to reduce the
complexity of a large family of systems based on
both classical and soft techniques (Yam, 1997). An
important advantage of the SVD complexity
reduction technique is that it offers a formal measure
to filter out the redundancy (exact reduction) and
also the weakly contributing parts (non-exact
reduction). This implies that the degree of reduction
can be chosen according to the maximum acceptable
error corresponding to the current circumstances. In
case of multi-dimensional problems, the SVD
technique can be defined in a multidimensional
matrix form, i.e. HOSVD can be applied.
The SVD based complexity reduction algorithm
is based on the decomposition of any real valued
F
matrix:
T
nnnnnnnn
ABAF
)(,2)()(,1)(
22211121
××××
=
(1)
where
k
A
, k=1,2 are orthogonal matrices
(
EAA
T
kk
=
), and
B
is a diagonal matrix
containing the
λ
i
singular values of
F
in
decreasing order. The maximum number of the
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
214

nonzero singular values is . The
singular values indicate the significance of the
corresponding columns of
nn
SVD
= min( , )
12
n
k
A
. The matrices can be
partitioned in the following way:
d
nnnk
rkk
A
))((, −×
r
nnkk
rk
AA
)(, ×
=
d
nnnn
r
nn
rr
rr
B
B
B
))()((
)(
21
0
0
−×−
×
=
,
where r denotes “reduced” and
nn
. If
rSVD
≤
d
B
contains only zero singular values then
d
B
and
d
k
A
can be dropped:
rT
r
r
ABAF
21
=
. If
d
B
contains
nonzero singular values, as well, then the
r
T
r
r
ABAF
21
' =
matrix is only an approximation of
F
and the maximum difference between the values
of
F
and
'F
equals
)(
1
21
1)('
nn
n
ni
iRSVD
SVD
r
FFE
×
+=
∑
≤−=
λ
(2)
For n-dimensional cases, HOSVD based
reduction (
)(),,,(
1
FHOSVDRFAA
r
n
="
) can
be made in n steps, in every step one dimension of
matrix
F
, containing the consequences is
reduced.
y
ii
n1
,...,
The first step sets
FF
=
1
. In the followings,
i
F
is generated by step i-1. The i-th step of the
algorithm (i>1) is
1, Spreading out the n-dimensional matrix
i
F
(size: ) into a two-
dimensional matrix
nnn
r
i
r
i11
×× × ××
−
... ... n
n
i
S
n n n
i
r
in−+
* * *...* )
111
(size:
).
nn
i
r
× ( *...
2, SVD based reduction of
i
S
:
*
'
i
i
T
i
i
i
SAABAS =≈
, where the size of
i
A
is
and the size of
nn
ii
r
×
∗
i
S
is
.
nn
i
rr
× ( nn n
i
r
in−+
*...* * *...* )
111
3, Re-stacking
∗
i
S
into the n-dimensional
matrix
1+i
F
(size ), and
cont. with step 1. for
nnn
r
i
r
i11
×× × ××
+
... ...
The SVD based complexity reduction can be
applied to various types of fuzzy systems, see e.g.
Takács et Várkonyi-Kóczy, 2002, and Takács et
Várkonyi-Kóczy, 2003.
4 ANYTIME MODELING:
COMPLEXITY REDUCTION
AND IMPROVING THE
APPROXIMATION
With the help of the SVD-based reduction not only
the redundancy of the rule-bases of fuzzy systems
can be removed, but further reduction can also be
obtained, considering the allowable error. This latter
can be done adaptively according to the temporal
conditions, thereby offering a way to use fuzzy
models in anytime systems.
The method also offers a way for improving the
model if later on we get into possession of new
information (approximation points) or more
resources. An algorithm can be suggested, which
finds the common minimal implementation space of
the compressed original and the new approximation
points, thus the complexity will not explode as we
include new information into the model. These two
techniques, non-exact complexity reduction and the
improvement of the approximation accuracy, ensure
that we can always cope with the temporarily
available (finite) time/resources and find the balance
between accuracy and complexity.
4.1 Reducing the Complexity of the
Model
For creating anytime models, first a practically
“accurate” fuzzy system is to be constructed. The
rule-base can be determined e.g. by using expert
knowledge. In the second step, the redundancy of
this model is reduced by (HO)SVD. The (non-exact)
anytime models can be obtained either by applying
the iterative transformation algorithm described in
Takács et Várkonyi-Kóczy, 2004 or in the general
frame of modular architecture (for details, see
Várkonyi-Kóczy et al., 2001).
In the first case, the transformation can be
performed off-line and the model evaluation can be
executed till the control action/results are needed.
The newest output corresponds to the, in the given
circumstances obtainable best results.
n
n
1+i
F
In the latter case, the models resulted by the
HOSVD reduction will differ in their accuracy and
complexity. An intelligent expert system, monitoring
ANYTIME MODELS IN FUZZY CONTROL
215

the actual state of the supervised system, can
adaptively determine and change for the units (rule
base models) to be applied according to the available
computing time and resources at the moment. These
considerations need additional computational
time/resources (further reducing the resources).
It is worth mentioning, that the SVD based
reduction finds the optimum, i.e., minimum number
of parameters which is needed to describe the
system.
One can find more details about the intelligent
anytime monitor and the algorithmic optimization of
the evaluations of the model-chain in Zilberstein,
1993 and Várkonyi-Kóczy et Samu, 2004.
4.2 Improving the Approximation of
the Model
The complexity of the control can be tuned both by
evaluating only a degraded model (decreasing the
granulation) and both by improving the existing
model (increasing the granulation) in the knowledge
of new information. This latter means the
improvement of the density of the approximation
points. Here a very important aim is not to let to
explode the complexity of the compressed model
when the approximation is extended with new
points. Thus, if approximation A is extended to B
with a new set of approximation points and basis,
then the question is how to transform A
r
to B
r
directly without decompressing A
r
, where A
r
and B
r
are the reduced forms of A and B. In the followings,
an algorithm is summarized for the complexity
compressed increase of such approximations.
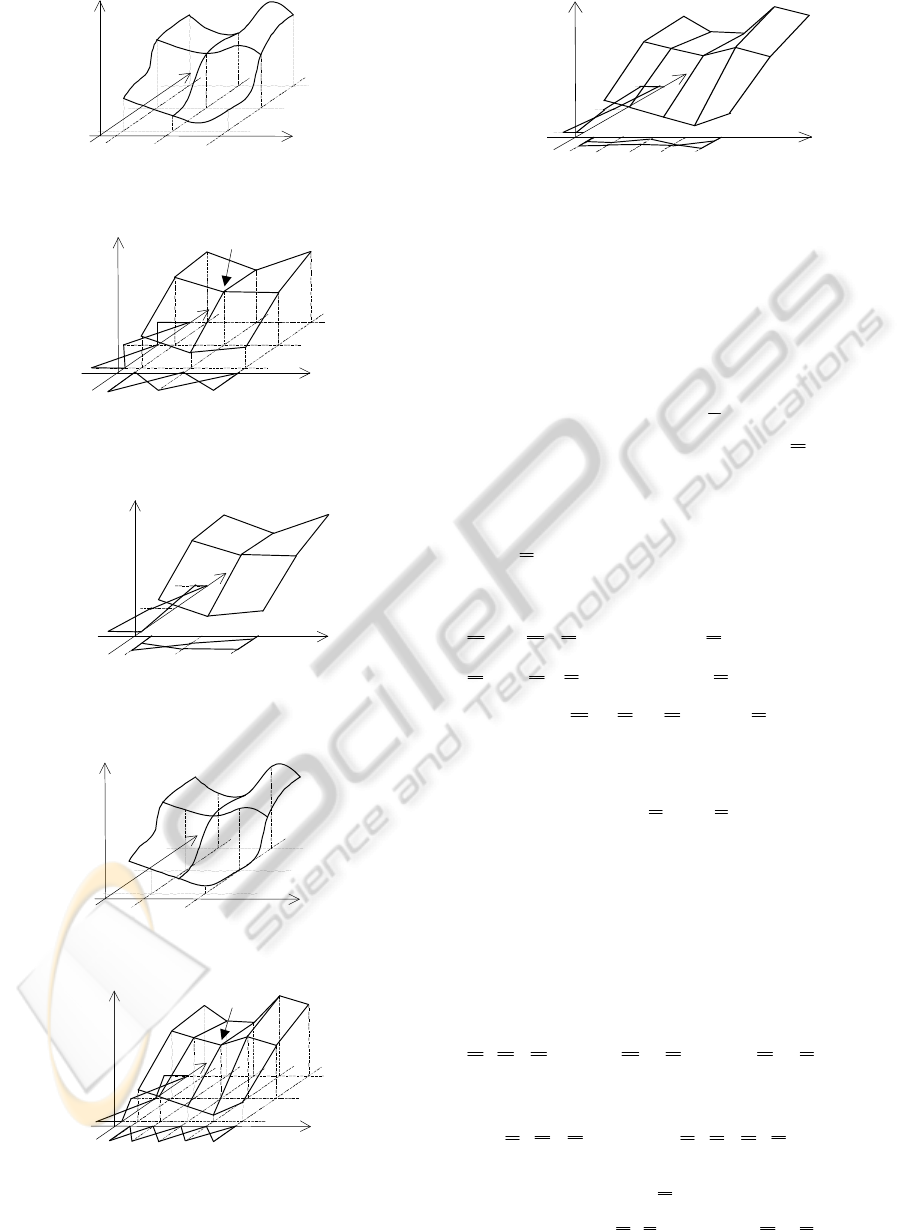
To enlighten more the problem, let us show a
simple example. Assume that we deal with the
approximation of function (see Fig. 1). For
simplicity, assume that the applied approximation A
is a bi-linear approximation based on the sampling
of over a rectangular grid (Fig. 2), so, the
bases are formed of triangular fuzzy sets (or first
order B-spline functions). After applying SVD based
reduction, the minimal dimensionality of the basis is
defined. In Fig. 3, as the minimum basis, two basis
functions are shown on each dimension instead of
the original three as depicted in Fig. 2.
),(
21
xxF
),(
21
xxF
Let us suppose that at a certain stage, further
points are sampled (Fig. 4) in order to increase the
density of the approximation points in dimension X
1
,
hence, to improve approximation A to achieve
approximation B. The new points can easily be
added to approximation A shown in Fig. 2 to yield
approximation B with an extended basis, as is shown
in Fig. 5. Usually, however, once reduced
approximation A
r
is found then the new points
should directly be added to A
r
(where there is no
localized approximation point) to generate a reduced
approximation B
r
(see Fig. 6). Here again, as an
illustration, two basis are obtained in each
dimension, hence the calculation complexity of A
r
and B
r
are the same, but the approximation is
improved.
In more general, the crucial point is to inject new
information, given in the original form, into the
compressed one. If the dimensionality of B
r
is larger
than A
r
then the new points and basis lead to the
expansion of the basis’ dimensionality of the
reduced form A
r
. On the other hand, if the new
points and basis have no new information on the
dimensionality of the basis then they are swallowed
in the reduced form without the expansion of the
dimensionality, however the approximation is
improved. Thus, the approximation can get better
with new points without increasing the calculation
complexity. This implies a practical question,
namely: how to apply those extra points taken from
a large sampled set to be embedded, which have no
new information on the dimensionality of the basis,
but carry new information on the approximation?
For fitting of two approximations into a
common basis system, we use the transformation of
the rational general form of PSGS and Takagi-
Sugeno-Kang fuzzy systems. The rational general
form (Klement et al., 1999) means that these
systems can be represented by a rational fraction
function
∑
∏
∑
∑
∏
∑
=
=
=
=
=
=
=
n
n
ni
n
n
ni
e
j
n
i
jjiji
e
j
n
e
j
n
i
jjiji
e
j
wx
xxfx
y
1
1
,,,
1
1
1
1
,,,
1
1
1
1
1
1
1
)(
),,()(
"
"
"
""
μ
μ
(3)
where
),,(),,(
1
1
,,,1,,
11
n
m
t
tiinii
xxbxxf
nn
""
""
∑
=
=
φ
.
It can be proved (see e.g. Yam, 1997 and Baranyi
et al., 1999) that (3) can always be transformed into
the form of
∑
∏
∑
∑
∏
∑
=
=
=
=
=
=
=
r
n
n
ni
r
r
n
n
ni
r
e
j
n
i
r
jji
r
ji
e
j
n
e
j
n
i
r
jji
r
ji
e
j
wx
xxfx
y
1
1
,,,
1
1
1
1
,,,
1
1
1
1
1
1
1
)(
),,()(
"
"
"
""
μ
μ
(4)
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
216
X
1
X
2
F
(
x
1,
x
1
)
Figure 1: Sampling over a rectangular grid.
),(
21
xxF
μ
X
1
X
2
μ
1,
i
(
x
1
)
μ
2,
j
(
x
2
)
μ
f
(
x
1,
x
1
)
b
i,j
Figure 2: Bi-linear approximation A of function
.
),(
21
xxF
μ
X
1
X
2
μ
r
1,
i
(
x
1
)
μ
r
2,
j
(
x
2
)
f
(
x
1,
x
1
)
μ
Figure 3: Approximation A
r
, which is the reduced form of
approximation A.
X
1
X
2
F
(
x
1,
x
1
)
Figure 4: Sampling further approximation points.
X
1
X
2
F
(
x
1,
x
1
)
μ
1,
i
(
x
1
)
μ
2,
j
(
x
2
)
μ
μ
b
i,j
Figure 5: Approximation B.
X
1
X
2
F
(
x
1,
x
1
)
μ
r
1
,
i
(
x
1
)
μ
r
2
,
j
(
x
2
)
μ
μ
Figure 6: Reduced approximation B
r
.
where and
, which is essential in complexity
reduction.
),,(),,(
1
1
,,,1,,
11
n
m
t
r
tiin
r
ii
xxbxxf
nn
""
""
∑
=
=
φ
i
r
e≤
i
ei∀ :
Let us suppose that two n-variable
approximations are defined on the same domain with
the same basis functions
i
μ
. One is called
“original” and is defined by matrix
O
of size
pee
n
×
×
×
"
1
where p is m or (see (3) and
(4)).
1+m
The other one is called “additional” and is given by
matrix
A
of the same size. Let us assume that both
approximations are reduced by the HOSVD
complexity reduction technique as:
)(),,,(
1
OHOSVDRONN
r
n
="
and
)(),,,(
1
AHOSVDRAGG
r
n
="
, where the sizes
of matrices
i
N
,
r
O
,
i
G
, and
r
A
are ,
, , and ,
respectively, and and . This
implies that the size of
o
ii
re ×
pr
a
×
1
i
prr
oo
×××
11
"
a
ii
re ×
o
i
ri∀ :
r
a
××
1
"
a
i
eri ≤∀ :
i
e≤
r
O
and
r
A
may be different,
thus the number and the shape of the reduced basis
of the two functions can also be different. The
method detailed in the following finds the minimal
common basis for the reduced forms. The reduction
can be exact or non-exact, the dimension of the
minimal basis in the non-exact case can be defined
according to a given error threshold like in case of
HOSVD.
For finding the minimal common basis
),,(
ao
i
U ΦΦ
for (
i
N
,
r
O
) and (
i
G
,
r
A
) , the
following steps have to be executed in each
ni ..1
=
dimension
(
:i
∀
),,,,(),,(
r
i
r
i
ao
i
iunify AGONΦΦU =
):
The first step of the method is to determine the
minimal unified basis
)(
i
U
in the i-th dimension.
Let us apply
[
]
),(),(
ii
i
i
GNireductZU =
where
ANYTIME MODELS IN FUZZY CONTROL
217

function
),( Bdreduct
reduces the size of an n-
dimensional ( ) matrix in the d-th
dimension. The results of the function are matrices
n
ee ××"
1
N
and
r
B
. The size of
N
is , ; the
size of
r
dd
ee ×
d
r
d
ee ≤
r
B
is , where and
. (The algorithm of the function is
similar to the HOSVD reduction algorithm, i.e. the
steps are: spread out, reduction, re-stack.) Thus, as a
result, we get
n
cc ××"
1
i
r
dd
ec =
i
ecdii =≠∀ :,
i
i
ZU ,
where the size of
i
U
is
(“u” denotes unified) and the size of
u
ii
re ×
i
Z
is
.
)(
a
i
o
i
u
i
rrr +×
The second step of the method is the
transformation of the elements of matrices
r
O
and
r
A
to the common basis:
Let
i
Z
be partitioned as
[
]
i
T
i
i
S=Z
where the
sizes of
i
S
and
i
T
are and
respectively.
o
i
u
i
rr ×
a
i
r×
u
i
r
o
Φ
and
a
Φ
are the results of
transformations
),,(
r
i
OSiproduct=
o
Φ
and
)
r
A,,(
i
a
Ti=Φ product
where function
)L,,()( NdA = product
multiplies the multi-
dimensional matrix
L
of by matrix
n
ee ××"
1
N
in
the
d-th dimension. If the size of
N
is then
hg ×
L
must hold . The size of the resulted matrix
h
d
=e
A
is where , and
n
a×"a ×
1 ii
ead =:ii∀ , ≠
ga
d
=
.
Let us return to the original aim, which is
injecting the points of additional approximation
A
into
O
r
, the reduced form of the original
approximation
O. According to the problem, the
union of
A and O
r
must be done without the
decompression of
O
r
. For this purpose the following
method is proposed:
Let us assume that an
n-variable original
approximation
O is defined by basis functions
o
i
μ
,
and
matrix
ni ..1=
O
of size in the
form of (3) (see also Fig. 2). Let us suppose that the
density of the approximation grid lines is increased
in the
k-th dimension (Figs. 4 and 5). Let the
extended approximation
E be defined by matrix
pee
o
n
o
×××"
1
E
whose size agrees with the size of
O
except in the
extended
k-th dimension where it equals
( indicates the number of additional
basis functions) (Fig. 5). The basis of the extended
approximation is the same as the original one in all
dimensions except in the
k-th one, which is simply
the joint set of the basis functions of approximations
O and A
a
k
e+
o
k
e
k
ee =
a
k
e
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
=
a
k
o
k
e
k
P
μ
μ
μ
(5)
a
k
μ
is the vector of the additional basis functions.
P
stands for a perturbation matrix if some special
ordering is needed for the basis functions in
e
k
μ
. The
type of the basis functions, however, usually
depends on their number due to various
requirements of the approximation, like non-
negativeness, sum normalization, and normality.
Thus, in case of increasing the number of the
approximation points, the number of the basis
functions is increasing as well and their shapes are
also changing. In this case, instead of simply joining
vectors
o
k
μ
and
a
k
μ
, a new set of basis
e
k
μ
is defined
according to the type of the approximation like in
Fig. 4. Consequently, having approximation
O and
the additional points, the extended approximation
E
can easily be obtained as
),,( AOkfitE =
where
function
),,,(
1 z
LLdfitA "
=
is for fitting the same
sized, except in the d-th dimension, matrices in the
d-th dimension: Matrices
][
,,,
1 n
iik
k
lL
"
=
have the size
of ,
nkk
ee
,1,
××"
zk ..1
=
to the subject that
i
k
ik
eedii
=
≠
∀
.
:,,
. The resulted matrix
A
has the
size as
n
ee
×
×
"
1
, where and the
elements of
∑
=
=
z
k
dkd
ee
1
,
][
,,
1 n
ii
a
"
=
t
j
A
are
where
nn
jjk
l
,,,
1
"
=
ii
a
,,
1
"
t
idtt
=
≠
∀
:,
,
i
,
∑
−
=
+=
1
1
,
k
s
dsd
ej
d
zk ..1
=
.
(More precisely, according to the perturbation
matrix in (5)
)),,(,,( Pkproduct AOkfitE
=
).
Embedding the New Approximation A into the
reduced Form of O.
The steps of the method are as
follows:
First, the redundancy of approximation A is
filtered out by applying
)(),,,(
1
AHOSVDRAGG
r
n
="
. As next, the
merged basis of O
r
and A
r
is defined. The common
minimal basis is determined in all, except the k-th,
dimensions.
Let
r
OW =
]1[
and
r
AQ =
]1[
. Then, for t= 1…n-1
evaluate
),,,,(),,(
][
][
]1[
]1[
t
jtj
t
tj
QGWNjunifyQWU
=
+
+
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
218
where . Finally, let
⎩
⎨
⎧
≥+
<
=
ktt
ktt
j
1
][n
o
Q=Φ
and
][n
Q
a
=Φ
.
For the k-th dimension let
⎥
⎦
⎤
⎢
⎣
⎡
=
k
k
G
N
PM
0
0
,
where
0
contains only zero elements and
P
can
ensure any special ordering, as used in (5).
k
N
and
k
G
are full rank matrices which means that no
further (exact) reduction of
M
can be obtained.
According to the basis, matrices
o
Φ
and
a
Φ
are
unified as
),,(
ao
kfitF ΦΦ=
.
Finally, the redundancy, i.e., the linear
dependence between matrices
o
Φ
and
a
Φ
is filtered
out of
F
by
),(),( FkreductEK
r
=
. Thus,
KMU
k
=
.
(Here we would like to note again that
K
is full
rank matrix, i.e., no further (exact) reduction of
k
U
can be obtained.) Matrix
i
U
, having the size of
, is to transform the basis as
u
ii
re ×
e
i
i
u
i
U
μμ
T
=
. The
size of matrix
r
E
is . (For more
details, see Baranyi et Várkonyi-Kóczy, 2002)
prr
u
n
u
×××"
1
5 ANYTIME TS FUZZY
CONTROL
There are numerous successful applications of
anytime control which affect on the analysis and
design of anytime control systems (see e.g. Andoga
et al., 2008, Madarasz et al., 2009, and Várkonyi-
Kóczy, 2008).
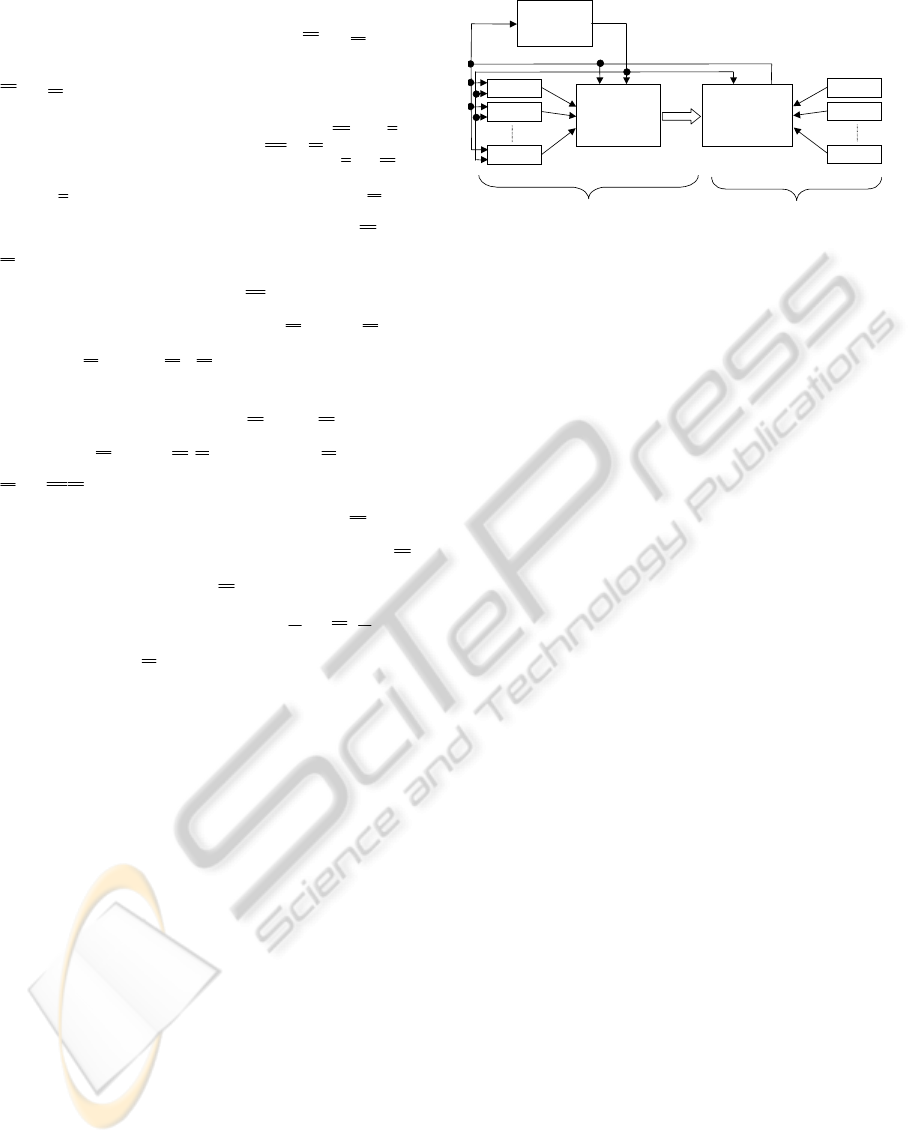
The previously discussed ideas can
fruitfully be applied in plant control if Takagi-
Sugeno (TS) fuzzy modeling and Parallel
Distributed Compensation (PDC) (Tanaka et Wang,
2001) based controller design is used (Fig. 7). If the
model approximation is given in the form of TS
fuzzy model, the controller design and Lyapunov
stability analysis of the nonlinear system reduce to
solving the Linear Matrix Inequalities (LMI)
problem (Tanaka et al., 1999). This means that first
of all we need a TS model of the nonlinear system to
be controlled. The construction of this model is of
key importance. This can be carried out either by
identification based on input-output data pairs or we
Control 2
Control m
Control 1
Model 1
Model 2
Model m
Membership
degrees
Fuzzy infernce
engine/model
combination
Fuzzy
inference
engine / control
combination
TS fuzzy observer TS fuzzy controller
Plant
u(t)
y(t)
Figure 7: TS fuzzy observer based control scheme.
can derive the model from given analytical system
equations.
The PDC offers a direct technique to design a
fuzzy controller from the TS fuzzy model. This
procedure means that a local controller is determined
to each local model. This implies, that the more
complex the system model is, the more complex
controller will be obtained. According to the
complexity problems outlined in the previous
sections we can conclude that when
theapproximation error of the model tends to zero,
the complexity of the controller explodes to infinity.
This pushes us to focus on possible complexity
reduction and anytime use.SVD based complexity
reduction can be applied on two levels in the TS
fuzzy controller. First, we can reduce the complexity
of the local models (local level reduction). Secondly,
it is possible to reduce the complexity of the overall
controller by neglecting those local controllers,
which have negligible or less significant role in the
control (model level reduction). Both can be applied
in an anytime way, where we take into account the
“distance” between the current position and the
operating point, as well. The model granularity or
the level of the iterative evaluation can cope with
this distance: the further we are, the more rough
control actions can be tolerated. Although,
approximated models may not guarantee the stability
of the system, this can also be ensured by
introducing robust control (see e.g. Tanaka et al.,
1999).
6 CONCLUSIONS
In this paper, the applicability of (Higher Order)
Singular Value Decomposition based anytime fuzzy
models in control is analyzed. It is proved that the
presented technique can be used for both complexity
reduction and for improving the approximation
without complexity explosion. The introduced
ANYTIME MODELS IN FUZZY CONTROL
219

anytime models can advantageously be used in many
types of time critical applications during resource
and data insufficient conditions.
ACKNOWLEDGEMENTS
This work was sponsored by the Hungarian National
Scientific Fund (OTKA K 78576) and the
Hungarian-Portuguese Intergovernmental S&T
Cooperation Program.
REFERENCES
Andoga, R., Főző, L., and Madarász, L., 2008 Use of
anytime control algorithms in the area of small
turbojet engines. In Proc. of the 6th IEEE Int. Conf. on
Computational Cybernetics, Stará Lesná, Slovakia,
Nov 28-30, pp. 33-36.
Baranyi, P., Y. Yam, Y., Yang, Ch-T. and Várkonyi-
Kóczy, A.R., 1999. Complexity Reduction of a
Rational General Form. In Proc. of the 8th IEEE Int.
Conf. on Fuzzy Systems, Seoul, Korea, Aug. 22-25, 1,
pp. 366-371.
Baranyi P., Lei, K., and Yam, Y., 2000. Complexity
reduction of singleton based neuro-fuzzy algorithm.
In Proc. of the 2000 IEEE International Conference
on Systems, Man, and Cybernetics, Oct. 8-11,
Nashville, USA, 4, pp. 2503-2508.
Baranyi, P., Várkonyi-Kóczy, A. R, Várlaki, P.,
Michelberger, P. and Patton, R. J., 2001. Singular
Value Based Model Approximation. In N. Mastorakis
(ed.) Problems in Applied Mathematics and
Computational Intelligence (Mathematics and
Computers in Science and Engineering), World
Scientific and Engineering Society Press, Danvers, pp.
119-124.
Baranyi, P. and Várkonyi-Kóczy, A. R., 2002. Adaptation
of SVD Based Fuzzy Reduction via Minimal
Expansion. IEEE Trans. on Instrumentation and
Measurement, 51(2), pp. 222-226.
Battacharya, R. and Balas, G. J., 2004. Anytime Control
Algorithms: Model Reduction Approach. AIAA
Journal of Guidance, Control and Dynamics, 27(5).
Fontanelli, D., Greco, L., and Bicchi, A, 2008. Anytime
Control Algorithms for Embedded Real-Time
Systems. In Egerstedt, M, Mishra, B. (eds) Hybrid
Systems: Computation and Control. Springer-Verlag,
Heidelberg, pp. 158-166.
Klement, E. P, Kóczy, L. T., and Moser, B., 1999. Are
fuzzy systems universal approximators?. Int. J.
General Systems, 28(2-3), pp. 259-282.
Madarász, L., Andoga, R., Főző L., and Lazar T., 2009.
Situational control, modeling and diagnostics of large
scale systems. In Rudas, I., Fodor, J., Kacprzyk, J.
(eds.) Towards Intelligent Engineering and
Information Technology. Springer-Verlag, Heidelberg,
pp. 153-164.
Rojas, O. J, Goodwin, G. C., Seron, M. M, and Feuer, A.,
2004. An SVD based strategy for receding horizon
control of input constrained linear systems. Int.
Journal of Robust and Nonlinear Control.
Takács, O. and Várkonyi-Kóczy, A. R., 2002. SVD Based
Complexity Reduction of Rule Bases with Non-Linear
Antecedent Fuzzy Sets, IEEE Trans. on
Instrumentation and Measurement, 51(2), pp. 217-
221.
Takács, O. and Várkonyi-Kóczy, A. R., 2003. SVD-based
Complexity Reduction of “Near PSGS” Fuzzy
Systems, In Proc. of the IEEE Int. Symp. on Intelligent
Signal Processing, Budapest, Hungary, Sep. 4-6, pp.
31-36.
Takács, O. and Várkonyi-Kóczy, A. R., 2004. „Iterative
Evaluation of Anytime PSGS Fuzzy Systems.” In
Sincak, P., Vascak, J., Hirota, K. (eds.) Quo Vadis
Machine Intelligence? - The Progressive Trends in
Intelligent Technologies, World Scientific Press,
Heidelberg, pp. 93-106.
Tanaka, K., Taniguchi, T., and H. O. Wang, 1999. Robust
and Optimal Fuzzy Control: A Linear Matrix
Inequality Approach. In Proc. of the 1999 IFAC World
Congress, Beijing, July 1999, pp. 213-218.
Tanaka K. and Wang, H. O, 2001. Fuzzy Control Systems
Design and Analysis, John Wiley & Sons, Inc. New
York.
Várkonyi-Kóczy, A. R., Ruano, A., Baranyi, P. and
Takács, O., 2001. Anytime Information Processing
Based on Fuzzy and Neural Network Models. In Proc.
of the 2001 IEEE Instrumentation and Measurement
Technology Conf., Budapest, Hungary, May 21-23, pp.
1247-1252.
Várkonyi-Kóczy, A. R., and Samu, G., 2004. Anytime
System Scheduler for Insufficient Resource
Availability. Int. J. of Advanced Computational
Intelligence and Intelligent Informatics, 8(5), pp. 488-
494.
Várkonyi-Kóczy, A. R., 2008. State Dependant Anytime
Control Methodology for Non-linear Systems. Int. J.l
of Advanced Computational Intelligence and
Intelligent Informatics, March, 12(2), , pp. 198-205.
Yam, Y., 1997. Fuzzy Approximation via Grid Sampling
and Singular Value Decomposition. In Proc. of the
IEEE Trans. on Systems, Men, and Cybernetics, 27(6),
pp. 933-951.
Zilberstein, S., 1993. Operational Rationality through
Compilation of Anytime Algorithms, PhD Thesis.
Zilberstein, S., 1996. Using Anytime Algorithms in
Intelligent systems. AI Magazine, 17(3) , pp. 73-83.
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
220
