
A NOVEL MODULAR BLACK-BOX ARCHITECTURE
FOR SECURE VEHICULAR NETWORKS
M’hamed Chammem, Mohamed Hamdi and Noureddine Boudriga
Communication Networks and Security Research Lab., Sup’Com, University of 7th of November, Carthage, Tunisia
Keywords: VCS, Black-box, Investigation process, Information privacy, Secure access, Authentication.
Abstract: The emerging technology of vehicular communication systems (VCSs) raises a number of technical
challenges that need to be addressed. Particularly, security ranks at the top of these challenges. In fact, the
plethora of services that can be provided using VCSs introduces new communication scenarios that require
special security services. This paper tackles the problems related to the storage of the evidences related to
onboard security architectures. A special emphasis is made on the management of the events related to the
features and history of the vehicle. In this context, a new black-box architecture is proposed. It consists in
two basic modules: a main black-box and an auxiliary black-box. We show that this separation allows a
better classification of the data records supported by the block-box. The interaction of the black-box with
the other components of the VCS is also discussed. Due to the sensitivity of the event records, the input data
flows pass necessarily through a security module which performs some key functions including event
timestamping and security policy management. A specific public key infrastructure is also proposed to
support our secure VCS architecture.
1 INTRODUCTION
The recent proliferation of the applications of
Vehicular Communication Systems (VCSs) has been
mainly rendered possible by the development of
embedded electronic systems and wireless
communication infrastructures. The particular
features of vehicular networks mainly stem from the
nature of the parties involved in the communication
and also from the properties of the data. In fact, the
entities that are part of a vehicular communications
system are private and public vehicles, the road-side
infrastructure, and authorities (the latter component
being composed primarily as network entities). An
authority will be responsible for the identity and
credential management for all vehicles registered in
its region (e.g., national territory, state, canton,
metropolitan area), similarly to what is currently the
case. Public vehicles (e.g. police cars) may have
specific roles and be considered as mobile
infrastructure.
This complex context raises two major
security-related challenges: (a) the secure storage of
the event records related to the different applications
the vehicle is involved in and (b) the simultaneous
provision of privacy guarantees and strong
authentication mechanisms. The analysis of the
different incidents that a vehicle can be subject to
(e.g., crashes, thefts, masquerading) strongly
depends on the solutions one can find for these
challenges. The characteristics of VCSs make it
difficult to manage the event records since these can
be related to the applications in which the vehicle is
involved or to some key manufacturing tasks. The
event records should also be generic enough to be
supported by the different actors involved in VCS
transactions.
In this paper, we propose a new black-box
architecture that supports the management of
complex evidence records emanating from the
different components of the VCS. It includes two
major modules: the main black-box and the auxiliary
black-box. The first is used to store highly-sensitive
data that are intrinsic to the vehicle while the latter
rather serves for the preservation of event records
related to the applications to which the vehicle
participates. A security unit is also devised to
support the implementation of sophisticated
operations including data timestamping and security
policy management. According to the application of
interest, appropriate access modes and privileges are
granted to the authorized entities. Furthermore, a
lifetime is defined for every event record category
93
Chammem M., Hamdi M. and Boudriga N. (2010).
A NOVEL MODULAR BLACK-BOX ARCHITECTURE FOR SECURE VEHICULAR NETWORKS.
In Proceedings of the International Conference on Data Communication Networking and Optical Communication Systems, pages 93-103
DOI: 10.5220/0002989400930103
Copyright
c
SciTePress
depending on the sensitivity of the corresponding
application. A Public Key Infrastructure (PKI) is
developed to support the implementation of the
proposed security architecture. A particular interest
is given to the simultaneous provision of
authentication and anonymity services.
The major contributions of the paper are given in the
following:
1. The black-box concept is generalized to
encompass the storage of data originating from
various applications while it has been used, in
the existing approaches, only to monitor
incidents and crashes.
2. The consideration of two black-box modules
(main black-box and auxiliary black-box) is
suitable with the segregation of duties concept
since the main black-box is accessed only by the
manufacturer and the authorities mandated to
perform post mortem investigation while the
auxiliary black-box can serve to store data
related to various applications.
3. The proposed vehicular PKI guarantees both
authentication and anonymity services. It is also
used to timestamp important events. It relies on
simple operations, which makes it suitable with
the computational and memory capabilities of the
VCS components.
4. We address a case study showing how our
system can be used in complex contexts (i.e.,
fleet management) to monitor various parameters
ranging from the driver behaviour to the events
that can occur to the vehicle.
The rest of the paper is structured as follows.
Section 2 reviews the existing researches that have
addressed the implementation of black-boxes for
vehicular applications. We highlight the factors that
make vehicular black-boxes different from those
used in airplanes. Section 3 explores a set of typical
applications that can be deployed on the basis of
VCSs and sets the basic security requirements for
these applications. Section 4 presents the secure
black-box architecture that constitutes the core of
our contribution. A functional description of the
main modules and data flows is given in this section.
Section 5 describes the PKI we introduced to
support the security services related to the new
black-box module. A case study illustrating the
functionalities enabled by our black-box system is
discussed in Section 6. Finally, Section 7 concludes
the paper.
2 RELATED WORK
The black-box is becoming a mandatory component
in modern vehicles. It can store a lot of useful
parameters to analyze for possible investigation
(Qiang Wu, et al., 2008). However, the functions
implemented on the black-box are not enough
sophisticated.
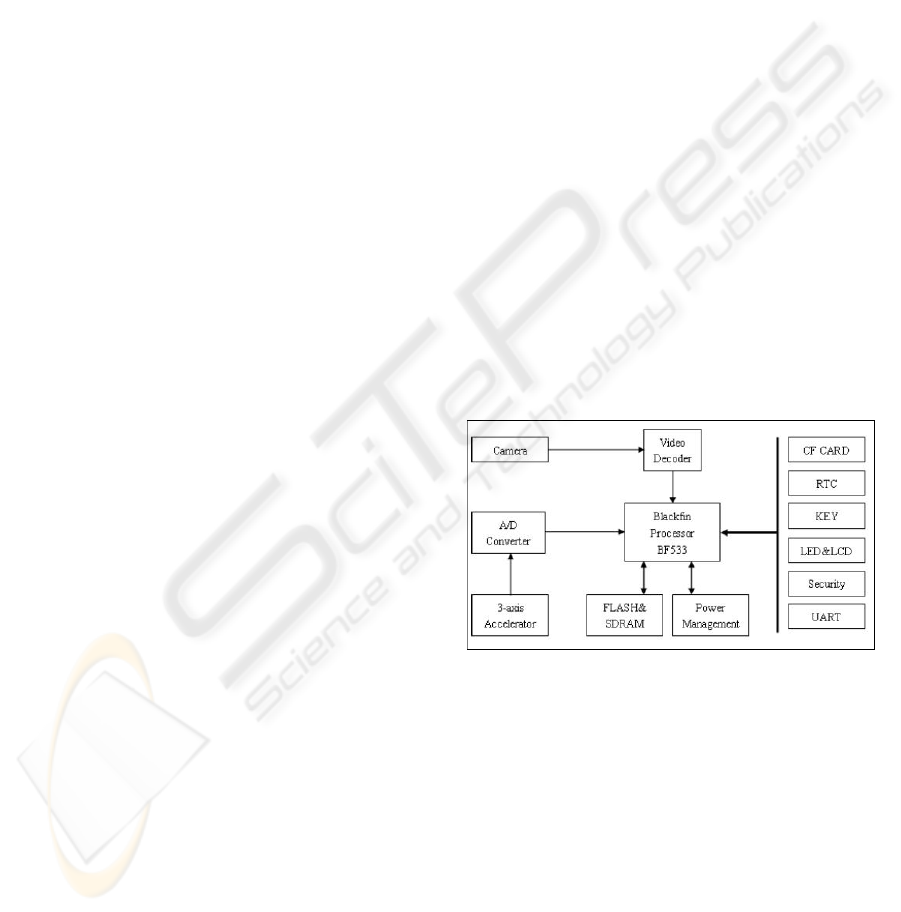
In Qiang Wu, et al., 2008, a vehicular black-box
architecture is discussed. The architecture of the
developed system can record and store analog video
sequences compliant to H.264 only when the
acceleration exceeds a limit value. When the car
operates in normal conditions, the system does not
record any information since the risk of traffic
accidents is limited. However, if an emergency
occurs, the system will start the video encoding and
stores a series of H.264 files.
The block diagram representing this black-box is
given in Figure 1. Apart from the camera and video
decoding device, we observe the 3-axis
accelerometer and a memory function. It should be
noticed that the security functions has not been
accurately addressed in this paper.
Since most of the black-box approaches that
have been proposed in the literature for VCSs rely
on Event Data Recorders, we accurately discuss this
concept in the following subsection.
Figure 1: System block diagram of black-box, (Qiang Wu,
et al., 2008).
2.1 EDR-based black-box Approaches
The integration of Event Data Recorders (EDRs) in
a number of recently manufactured vehicles presents
a different perspective on the assessment of the
validity of passengers risk based on the Acceleration
Severity Index ’ASI’ (Gabauer, D.J., and Gabler,
H.C., 2005). EDRs are capable of electronically
recording data such as vehicle speed, brake status
and throttle position just prior to and during an
accident. The ability of EDRs to document the
deceleration of a vehicle during a collision event is
of particular interest. Another interesting feature
DCNET 2010 - International Conference on Data Communication Networking
94

developed in this study is the ability of EDR to
record the velocity profile of the vehicle during a
collision event.
Other approaches rely on EDR technology to
investigate the correlation between the ASI
threshold limits and the potential for passenger
injury in crash events. Gabauer, D. J., and Gabler, H.
C., (Gabauer, D. J., Gabler, H.C., 2005) investigate a
relationship between the ASI and injury to airbag-
restrained occupants and has established a
methodology for future studies.
Today, the complex computer systems in
vehicles can store huge amount of data.
The concept of black-box has been used for a long
period in aircraft monitoring for recording
information in the few minutes before a crash.
For years, this same concept has been widely
used in the automotive field including crash
investigation and accident scenario reconstruction
(The Florida Senate, 2009 and Deborah Sapper et
al., 2009).
In most vehicles, the EDR module is located in
the airbag control module. The objective of this
module is to monitor the crash scenarios and to
deploy the airbags if needed. This module also
contains several accelerometers. The EDR will
record about five seconds of pre-crash data per type
of vehicle. These data include vehicle speed,
acceleration / deceleration, engine speed...
The EDR will also record the crashing phase,
assessing different parameters every five
milliseconds before impact. These data can be
analyzed to calculate many parameters including the
crash duration and impact velocity (Hampton C.
Gabler and al., 2004).
Despite the abundance of the literature having
addressed the EDR concept, several severe
drawbacks can be noticed (Aleecia M. McDonald,
Lorrie Faith Cranor., 2006):
1. The stored data are not structured according to
their sensitivity making them viewable to
everyone that accesses the black-box. This is not
convenient to the real context where the vehicle
is involved in many applications generating data
with different security levels. The fact that the
EDR is monolithic can be at the origin of
confidentiality and privacy violations if the usage
of the black-box is generalized to the monitoring
of miscellaneous services.
2. The entities storing data into the EDR are not
authenticated. Similarly, the stored events are not
timestamped. These two facts prevents the use of
the stored data as legal proofs. Cryptographic
functionalities should be enabled on the EDR in
order to ensure the authenticity and the integrity
of the data retrieved by the event analyzer.
3. The data stored into the EDR are not prone to
automated analysis. They present relevance only
to experts that can decode appropriately these
data. This constitutes a serious limitation since
even the owner of the vehicle is unable to exploit
the information stored in the corresponding
black-box. Consequently, the usage of the black-
box is confined to the analysis of serious
incidents while it can be used for the storage of
less harmful events such as the profiling of the
driver behaviour or the vehicle state.
2.2 Black-box usage in Modern
Vehicles
Black-boxes have many applications in vehicular
networks. The most relevant usages of this
technology are listed below.
1. Investigating accidents and crashes: The data
recorded by EDR or the black-box just a few
seconds before a crash are usually exploited by
experts in the investigation process to delineate
responsibilities and evidences. The recorded
parameters are mainly related to vehicle speed,
acceleration, braking, timestamp...
2. Training young drivers: Clemens Kaufmann and
Christine Tureschek., (Clemens Kaufmann,
Christine Tureschek., 2008) has a particular
operating data recorded for evaluating the
performance of young drivers during training
sessions. This practice seems to be very helpful
for improving driver training.
3. Detecting unauthorized modification of odometer
parameters: Changing the odometer parameters
reading is a crime that is unfortunately becoming
a widely-performed practice. Some vehicle
owners are not immune to this temptation. Black-
box can provide proofs to ensure that the mileage
is correct.
4. Detecting unauthorized modification of VIN: A
unique identification number of vehicle (VIN) is
assigned to each car. It is a unique identifier of
17 characters, defined by an international
standard that identifies a vehicle uniquely. The
bodies of law enforcement use these serial
numbers to identify and retrieve cars or car parts
that have been stolen. Automobile manufacturers
use the VIN as part of safety recalls. The
character identification number (VIN) can be
considered as part of the black-box to indicate
the vehicle manufacturing data, model, location
of manufacture, and possibly more. The
decoding of this issue is the process of
deciphering that information. The VIN is also
A NOVEL MODULAR BLACK-BOX ARCHITECTURE FOR SECURE VEHICULAR NETWORKS
95
used to access a report on the vehicle history
(Carfax, 2010). Each report issued by CARFAX
contains important information that can influence
the decision of whether to buy a used car.
5. Addressing special needs: The use of vehicles by
governmental poses specific problems and
therefore requires careful management of the
vehicle's history including the presence of
multiple drivers per vehicle. Some information
available in the black-box can allow the
identification the behaviours of drivers and their
parameters such as speed, acceleration, shock.
The exploitation of such information can help in
fleet management car (e.g., government, fire-
fighters, rent) to better understand the history of
cars.
2.3 Intrinsic Features of the Vehicular
Black-box
Black-boxes have been widely as part of airplane
security systems to store reliable proofs and
evidences that can assist in investigation processes.
The extension of this concept to the VCS context
requires substantial modifications due to the
particular characteristics of vehicular networks. In
the following, we give the most important features
of vehicular black-boxes.
1. The qualifications of the driver or driver are
completely different. The drivers like the drivers
of trains and boats have training and
qualifications. They all have predispositions to
drive in and drive safely.
2. Regulating the operation of airplanes, trains and
boats is generally governed by national and
international laws. This implies that maintenance
procedures of equipment and safety procedures
that tend toward universal repositories. Driver of
the car does not have comparable qualifications
to the requirements of the aerospace or marine.
Cars drive on city streets, semi-urban areas and
motorways. The space evolution of cars is
particularly dynamic in terms of the evolution of
other cars, pedestrians, etc.
3. Research and development of black-box for
vehicles for over forty years, have provided some
solutions including the implementation of
electronic systems called 'Event Data Recorder'.
The EDR is used to investigate in cases of traffic
accidents and delineate the responsibilities of
different actors involved in the accident.
4. Many countries do not exploit the data recorded
by the EDR in accidents. It is important to note
that many new cars contain an EDR is close to
100% (registered in 2009/2010).
5. Electronic systems in the car are seen by many
drivers and users of the car, like electronic
gadgets and not as professional solutions for
driver assistance contrary to the perception of
electronic systems of the aircraft, boat or train.
The reliability of components and electronic
systems is widely approved.
6. The vehicular system actors are many:
manufacturer, vehicle owner, insurance,
mechanic, engineering services Transportation
(technical inspection), police, customs...
7. Manufacturers of cars tend to increase vehicle
safety through two approaches:
a. Enhanced Passive Safety: Passive safety for
all that, the vehicle is designed to avoid
serious injury (or death) to the driver and
passenger of a car during an accident (e.g.,
reinforcement box, airbags, security belt)
b. Enhanced active safety Active safety is
everything in the vehicle and around the
vehicle is designed to avoid the accident in
automotive technology: electronics (ABS,
ESP(electronic stability control), BAS - BAS
• Traction...)
8. Many development ideas of black-box for
vehicles. The basic idea is to capture a few
seconds of data before and after the shock (the
crash).
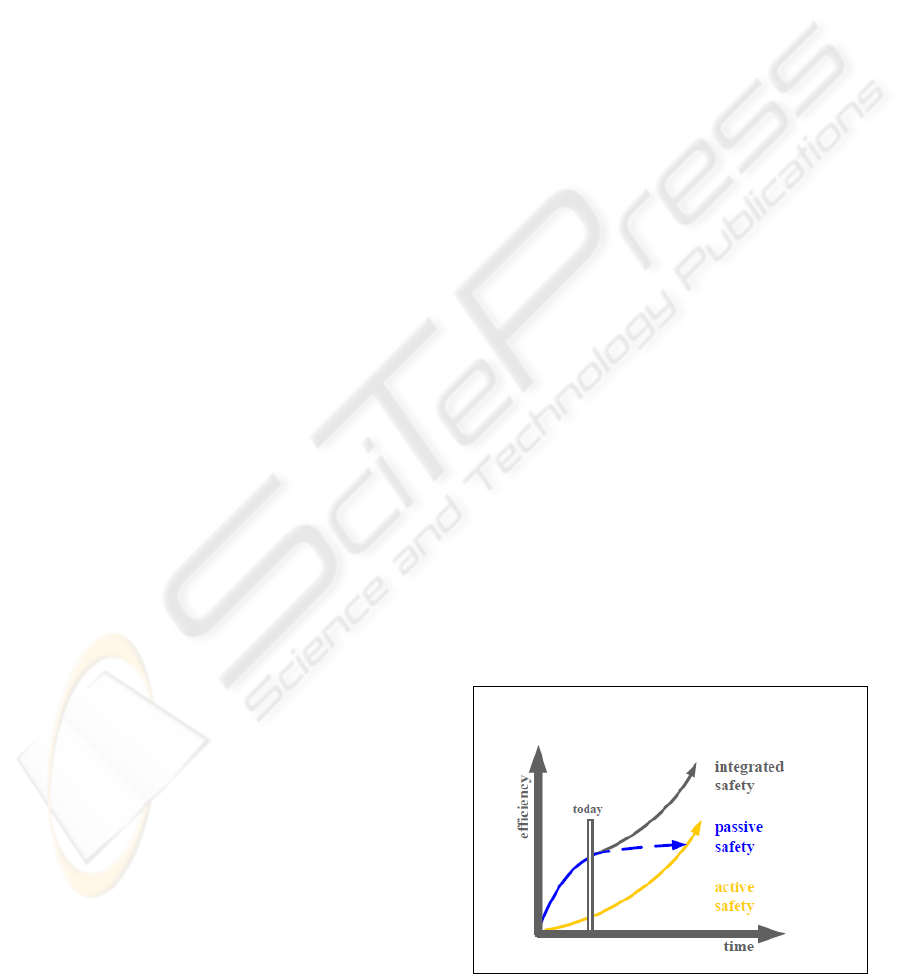
9. The vehicles of tomorrow must be designed to
combine the active and passive safety (figure 2).
The efficiency of passive safety systems are
beginning to reach saturation. In contrast, active
safety systems promote the potential of
significantly improving the effectiveness of
vehicle safety. Significant improvements can be
obtained by combining the systems of active and
passive safety (Claudia Kratzsch, Heidi
Kroemker., 2009).
Figure 2: Efficiency of Integrated safety approach
(Claudia Kratzsch, Heidi Kroemker., 2009).
DCNET 2010 - International Conference on Data Communication Networking
96
3 SECURE ARCHITECTURE FOR
VEHICULAR NETWORKS
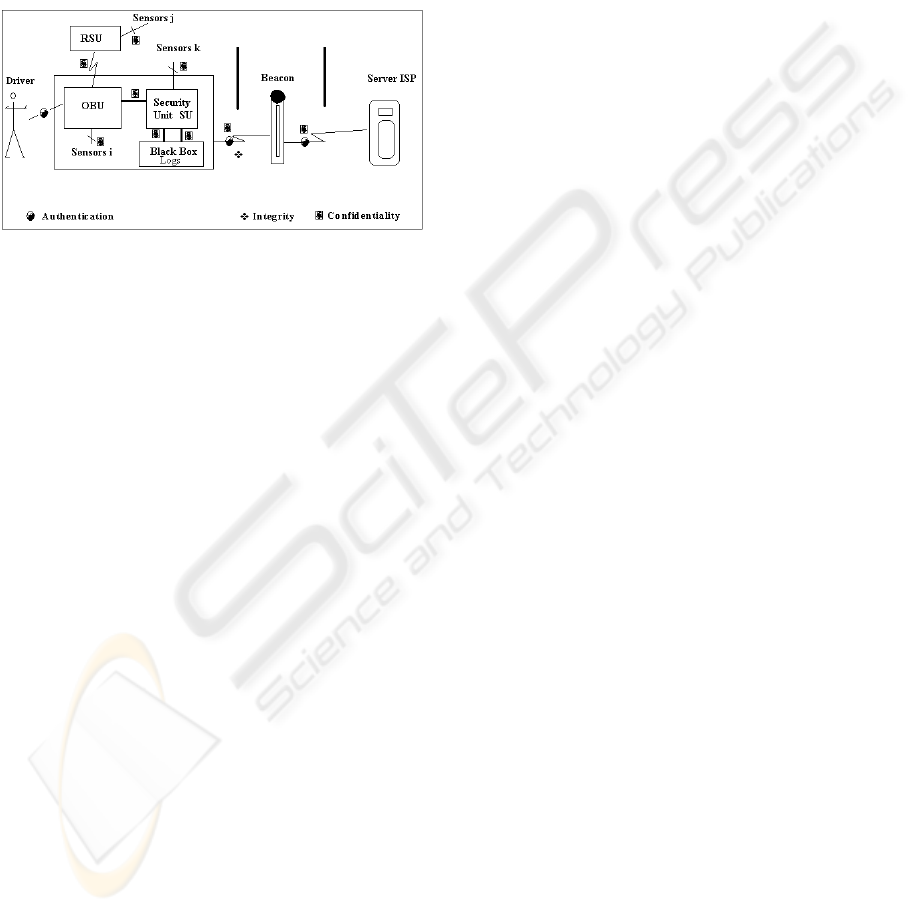
In M. Chammem et al., (M. Chammem et al., 2009),
we proposed a secure VCS architecture depicted in
figure 3. In this section, we describe the components
of this architecture and investigate the potential
services that it can provide. We also set the basic
security requirements for these applications.
Figure 3: General architecture (M. Chammem et al.,
2009).
3.1 Secure VCS Architecture
The key components of the secure VCS architecture
developed in (M. Chammem et al., 2009) are cited in
the following.
Sensors: A set of sensors gathering various
information about the external and internal
environments of the vehicle are part of the
communication system. The data provided by these
sensors mainly serves not only to monitor the
behaviour of the driver and the vehicle but also for
the implementation of computer-assisted decision
making systems inside the vehicle.
Onboard Unit (OBU): This component implements
most of the computational tasks required to deploy
the applications of the VCS. It generally consist of
one or more processors or microcontrollers
interacting through various specific bus technologies
such as CAN(Controller Area Network), VAN,
(Vehicle Area Network), LIN (Local Interconnect
Network), FlexRay, MOST.
Security Unit (SU): The security policies related to
the different actions related to the services involving
the vehicle are managed by the SU. This component
can be used to build trust relations between the
components involved in vehicular transactions. It
supports advanced security functionalities related to
cryptographic protocols (e.g., PKI, anonymous
certificates) and security policy management.
Black-Box: It is mainly used to store the proofs and
evidences related to various vehicular transactions in
a secure environment. It should implement
appropriate policies in order to cope with the
heterogeneity of the evidences that can relate to the
driver behavior (e.g., payment receipts, velocity
excess) or the vehicle state (e.g., incidents, identity
modification)
Road Side Unit (RSU): The RSU acts as a relay
between the driver, the vehicle, and the
environment. It often consists in a data gathering and
communication system related to the environmental
data (e.g., traffic, atmospheric conditions, available
services). It can also serve to advertise for some
services and applications. Other possible usages of
RSU are emergency handling and assisted driving.
Beacon: Performs the same functionalities as the
RSU but it is resource-impoverished. The usage of
beacons is often limited to detection and localization
services.
Application and service provider (ASP): Various
services can be provided on the basis a VCS. ASPs
can be the source of various data such as news,
multimedia content, location information, and
advertisements.
3.2 Short-range and Long-range
Communication Media in VCSs
Modern vehicles are increasingly relying on
electronic devices to access/provide secure services
across public communication networks. At the
vehicle level, specific buses are used to ensure local
communication between the various devices.
Additional devices are also included into the vehicle
so that it can communicate with other entities
belonging to the VCS.
In the following, we review the most important
bus technologies integrated in today’s vehicles
(Anthony Marino, John Schmalzel., 2007 and Milind
Khanapurkar, et al. 2008).
Controller Area Network (CAN): developed by
Bosh in the eighties. All sensors, actuators, and
command devices have the same privilege level and
are connected through a serial bus.
Local Interconnect Network LIN: used as an in-
vehicle communication and networking serial bus
between intelligent sensors and actuators. Other auto
body electronics include air conditioning systems,
doors, seats, column, climate control, switch panel,
intelligent wipers, and sunroof actuators.
Byteflight: is used for safety-critical applications in
motor vehicles. Byteflight is a TDMA (Time
A NOVEL MODULAR BLACK-BOX ARCHITECTURE FOR SECURE VEHICULAR NETWORKS
97

Division Multiple Access) protocol that runs at
10Mbps over (2-WIRE or 3-WIRE) Plastic optical
fibers in a bus, Star or Cluster configuration which
provides an information update rate of 250uS.
FlexRay: is a high-speed serial communication
system for in-vehicle networks using Point-to-Point
links, at 10Mbps (Fault-Tolerant) over Un-shielded
Twisted Pair or Shielded Twisted Pair cable.
The FlexRay bus defines the Physical layer
(Electrical and Optical) and Protocol.
FlexRay is an extended protocol version of
byteflight. Applications for FlexRay include; steer-
by-wire and brake-by-wire.
Media Oriented Systems Transport (MOST): is
the de-facto standard for multimedia and
infotainment networking in the automotive industry.
MOST defines a multimedia fiber-optic (low
overhead, low cost) point-to-point network
implemented in a ring, star or daisy-chain topology
over Plastic optical fibers.
Long-range communication infrastructures are
also required in VCSs to enable Vehicle-to-Vehicle
(V2V) and Vehicle-to-Infrastructure (V2I) data
transmission. Multiple standards can be used to this
purpose including Wifi, GSM, GPRS, UMTS, and
WIMAX.
3.3 Security Requirements for
Vehicular Communication
In this subsection, we point out the security needs
related to secure service provision over vehicular
networks (M. Chammem et al., 2009 and Maxim
Raya et al., 2006).
• Authentication: The authentication process must
verify the identity of the driver or the person
authorized to drive the vehicle. Similarly,
beacons should be authenticated in order to
counter spoofing attacks.
• Integrity: The information and data from
various sources of information should not be
either altered or amended by an intruder.
Relevant information from the sensors,
computers OBU, RSU and SU systems and
V2V and V2I communications should be
protected against unauthorized modifications.
• Non-repudiation: It is important to ensure that
the parties engaged in a V2V and V2I
communication cannot deny that a transaction /
communication took place.
• Access control: The vehicle systems are a
means of transport belonging to individuals or
legal entities. The possessive side is crucial.
Access to systems is strictly controlled by
means of increasingly secure.
• Confidentiality: The confidentiality of
information must be ensured in all vehicle
systems. Only authorized persons can access
information, particularly in V2V and V2I
communications.
• Accessibility: The vehicular systems have a
long lifetime. The proper functioning of
sensitive subsystems must be ensured
throughout the lifecycle of the vehicle.
• Privacy: Vehicular systems are private. Their
operations are governed by regulations and
practices. The privacy of the driver and
passengers is considered as an important aspect
of security.
• Responsibility enforcement: Drivers of vehicles
are fully responsible for their actions in the
process of conduct. Vehicles should provide
information to identify or assist in the
attribution of responsibility. Authorities are
generally entitled to the identification of
responsibilities in case of accidents (police
officers, insurance experts).
• Vehicle Tracking: The precise location of the
vehicle has become useful information for
vehicle safety in particular against theft and
rangeland management.
• Proof and evidence management: During the
movement of vehicles on roads and highways,
some services require evidence to identify the
vehicle in case of legal travel speed; accidents...
The proof may include photography of the
registration plate of the vehicle supported by a
timestamp.
4 ENHANCED BLACK-BOX
ARCHITECTURE FOR VCS
In this section, we introduce a new black-box
architecture for VCSs. We first describe the modules
constituting this black box. Then, we discuss the
typology of the events that can be stored.
Figure 4 illustrates the functional architecture of the
proposed enhanced black-box architecture for secure
vehicular communication system. We mainly
consider two black-box modules: a main black-box
and an auxiliary black-box.
• Main black-box (MBB): used to store the
essential parameters of the vehicle including
VIN. Three data flows can be thought of to store
data in this module. The first flow (1) serves to
DCNET 2010 - International Conference on Data Communication Networking
98

upload the features generated at the
manufacturing phase to the MMB using a
privileged access. The second data flow (2)
relates to events generated by the sensors
embedded in the vehicle. This encompasses the
information about incidents including crashes
and airbag deployment. The third data flow (3)
concerns the events generated by the OBU
without direct human intervention. For instance,
physical damages occurring on the OBU as well
as driving anomalies fall into this category. It is
noteworthy that all the data stored in the MBB
are (relatively) timestamped by the SU without
the intervention of external timestamping
servers.
• Auxiliary black-box (ABB): This module is used
to store data related to the applications in which
the vehicle is involved. Unlike the information
stored on the MBB, ABB entries have a finite
lifetime and cannot excess a storage space quota.
This is necessary due to the panoply of potential
applications that can enrich modern VCSs. The
security policies regulating the storage of these
application data are also stored in the ABB.
Three data flows can be considered with respect
to the ABB. The first flow (4) corresponds to
data that pass through the Data Recording
Module (DRM) and that may originate from the
application provider platform or from a local
passenger. These events do not require
authentication by the SU. The second data flow
(5) is similar to (4) except that the stored
information passes through the User
Authentication Module (UAM) prior to the
DRM. It is used for sensitive application and
user data. The third data flow (6) concerns the
security policies that are stored on the ABB.
Such information must be authenticated since the
addition or the modification of security policies
is restricted to authorized users.
The alert reader would have noticed that the MBB
and the ABB are physically separated in the sense
that no communication occurs between them. This is
perfectly sound since these two modules are
accessible by different entities. On the one hand,
write access to the MBB is hardly restricted to the
manufacturer, in the initialization phase, while read
access is restricted to the transportation regulation
authorities, in the operating phase. A tamper-proof
capability is also made available to prohibit write
access through the privileged access port (even to
the manufacturer) once the vehicle is in the
operating phase (i.e., has passed the initialization
phase). On the other hand, access modes are richer
for the ABB since different scenarios, depending on
the available applications should be considered.
More practically, data stored in the ABB can be, for
example, (partially) retrieved by the owner, a private
company (in the case of fleet management), and also
experts authorized by regulatory courts.
Through the previous discussion, it appears that
the SU is a mandatory interface to write data into the
black-box modules. Basically, the SU supports four
access modes:
Privileged access:
The SU enables this special
mode to manage the basic characteristics and
parameters of the vehicle. Privileged write access is
granted only to the manufacturer, during the
initialization phase, in order to store the VIN.
However, read access should be possible to the
entities authorized to verify the authenticity of VIN
(such entities are often agencies under the control of
the department of transportation).
Sensor events:
Modern vehicles are richly
equipped with sensors based on various technologies
(e.g., temperature sensors, velocity sensors, contact
sensors, light sensors). Depending on its sensitivity,
the information gathered by these sensors are stored
either in the MBB or in the ABB. With the
development of sensing and networking
technologies, a trend that will probably be developed
in the near future is to inter-connect the embedded
sensors.
Passenger events:
Since the driver and the
passengers are able to interact with the OBU, the
corresponding events should be handled by the SU
in order to perform authentication and timestamping
procedures. Different passenger clearance levels
should be defined in order to deploy access control
policies to the SU according to the source privilege.
Application events:
When interacting with the
available applications, several event records should
be stored to serve as proofs or evidences. Such
records range from payment receipts to
timestamping tokens. To promote fairness between
the multiple applications, lifetime and space quota
policies should be enforced by the SU.
In the privileged access mode, a user should be
authenticated before inserting modifications to the
SPMM. The possible actions that can be made:
- Add a new policy
- Modify an existing policy
A policy is defined as follows:
Security_policy = {lifetime,protection_type,access_mode}
Protecting_type:= enciphered,signed,hashed
Access_mode Є {users_class} x {read,write}
User_class:= owner | driver
The owner car associate the data related to a given
application to specific security policy. The maximum
A NOVEL MODULAR BLACK-BOX ARCHITECTURE FOR SECURE VEHICULAR NETWORKS
99
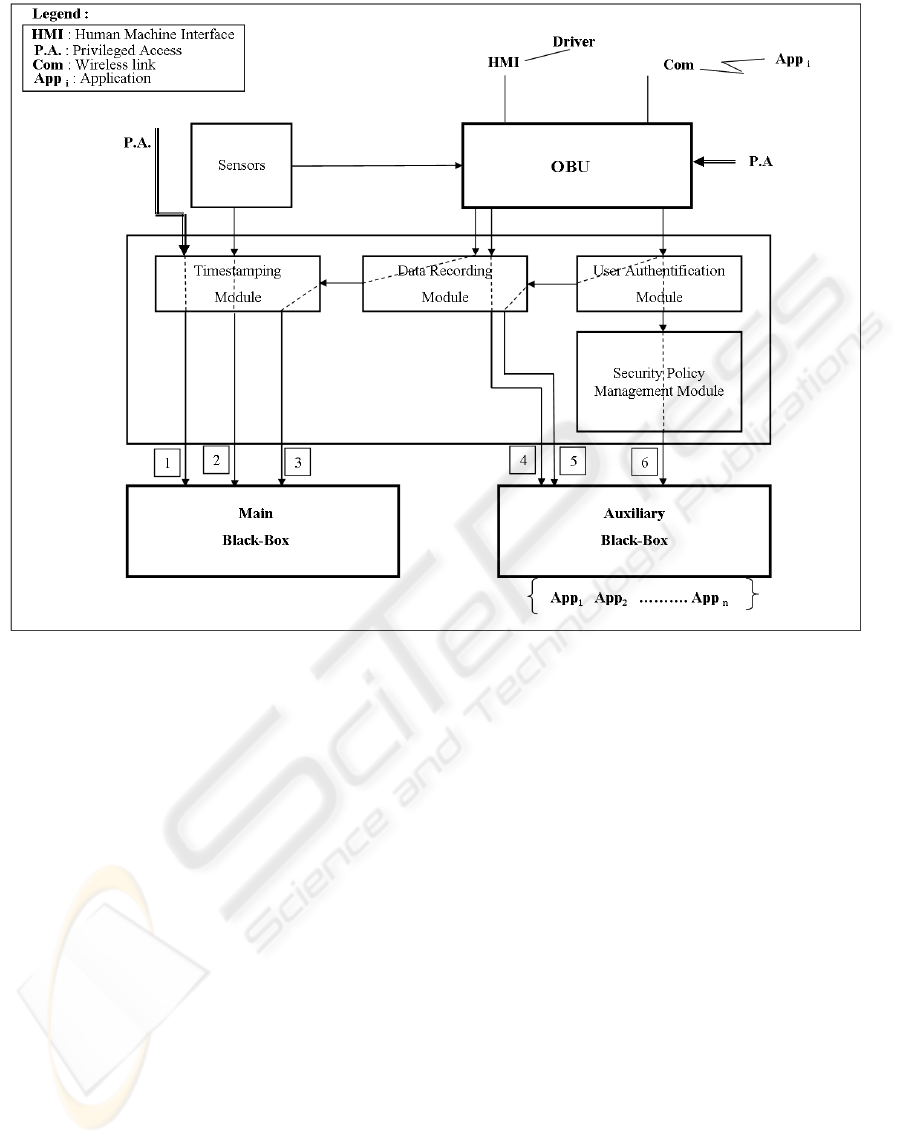
Figure 4: Enhanced black-box architecture.
storage space that can be record for this data should
also be declared.
Association:= data,security_policy,storage_space
Then the record corresponding to the data of interest
exceed the maximum storage space; a rotation policy
is applied to preserve the most recent records.
5 VEHICULAR PKI
ARCHITECTURE
Clearly, in the architecture introduced in the
previous section, the black box is the focal
component that will be used to look for trustable
evidences regarding past events. To implement a
mechanism allowing the preservation of such
evidences, we introduce a new PKI that adapts to the
specific features of vehicular networks. It relies on
the encryption scheme proposed by Franklin and
Boneh (D. Boneh and M. Franklin., 2001).
Vehicles and RSUs should be able to authenticate
themselves and at the same time use disposable
pseudonyms for vehicles so that their activities and
communications are not tracked by parties that are
eavesdropping on them. We also need to make
certain that there is a verifiable trail between the
pseudonyms and the real identities of the vehicle and
that only a common, Trusted Authority (TA) is able
to verify that trail in case of a dispute.
Unfortunately, existing PKI solutions are not
convenient to our context because of the following
reasons:
• Traditional PKIs are not very flexible in
providing user specified levels of privacy due to
rigid pseudonym (common name) assignments
• The size of the asymmetric keys used in existing
cryptosystems do not allow the implementation
of bandwidth-efficient protocols
• Existing signature algorithms do not allow the
fulfillment of both authentication and anonymity
preservation
To overcome these limitations, we propose the
use of a modified asymmetric cryptosystem where
public keys are substituted by arbitrary strings. The
scheme proposed by Boneh and Franklin uses a
bilinear map
: Γ
Γ
Γ
,
where Γ
1
and Γ
2
are cyclic groups of order p for
DCNET 2010 - International Conference on Data Communication Networking
100
some large prime p. In particular, satisfies that
(, ) (,)
ab
aP bQ P Q
μμ
=
for all , ∈PQ
11
2Γ⋅Γ⋅×⋅Γ
and
,
p
ab∈ ] Z
2
.
Weil and Tate pairings on elliptic curves are two
fast and efficient ways of constructing such bilinear
maps. In addition to encryption, we need the ability
to provide non-repudiation in a cost-effective
manner. In order to achieve non-repudiation with
relatively meager computational requirements, we
have chosen to employ a function which combines
signing and encryption operations and also produces
smaller ciphertext as compared to ‘sign and then
encrypt’ strategies. Such features are not provided
by D. Boneh and M. Franklin (D. Boneh and M.
Franklin., 2001).
In our solution, each vehicle and RSU has a
unique identifier ID
id
. These identifiers include the
designation of the entity as a vehicle or RSU; e.g.
IDv = (vehicle||identifier). We envision that these
identifiers can be certified at regular periods (say
annually) by a TA. If any certificate is revoked the
TA notifies all the RSUs in the system, so RSUs
have to only store Certificate Revocation List (CRL)
entries that are less than a year old. Vehicles never
have to download any CRL, which provides for huge
savings in communication costs. Moreover, we use
the following notations:
• d
v
; d
I
: Secret key corresponding to ID
v
and ID
I
;
respectively.
• K
I
: Secret key assigned to the RSU I.
• TS
i
: Timestamp at time i.
• , : Public and private keys assigned to
a vehicle by TA as part of their certificates.
• sigEncrypt (sigencryption) and sigDecrypt
(sigdecryption) refer to identity-based operations
while rsaEncrypt, rsaDecrypt, rsaSign and
rsaVerify refer to operations that use the RSA
algorithm. In some places we breakup sigEncrypt
and sigDecrypt to its subfunctions Sign, Encrypt,
Decrypt and Verify. Additionally, we use
aesEncrypt and aesDecrypt to denote symmetric
cipher operations using the AES cipher.
Our process is conducted according to three phases:
Setup Phase: The TA conducts the setup phase of
the cryptosystem and computes the relevant system
parameters (params) and the master secret s. Both of
these are then distributed to all the RSUs in the
system. The TA also generates a random secret key
K
I
for each RSU I and distributes it to that RSU.
The TA keeps a copy of this key in its database to
help in future arbitration proceedings. The TA
provides each vehicle with its unique vehicle
identifier (ID
v
), public key certificate certifying this
identifier and including a public and private key
(Pub
v
and Pvt
v
) generated using classical algorithms
like RSA. Additionally each vehicle is provided with
all the public system parameters (params) of the
identity-based cryptosystem.
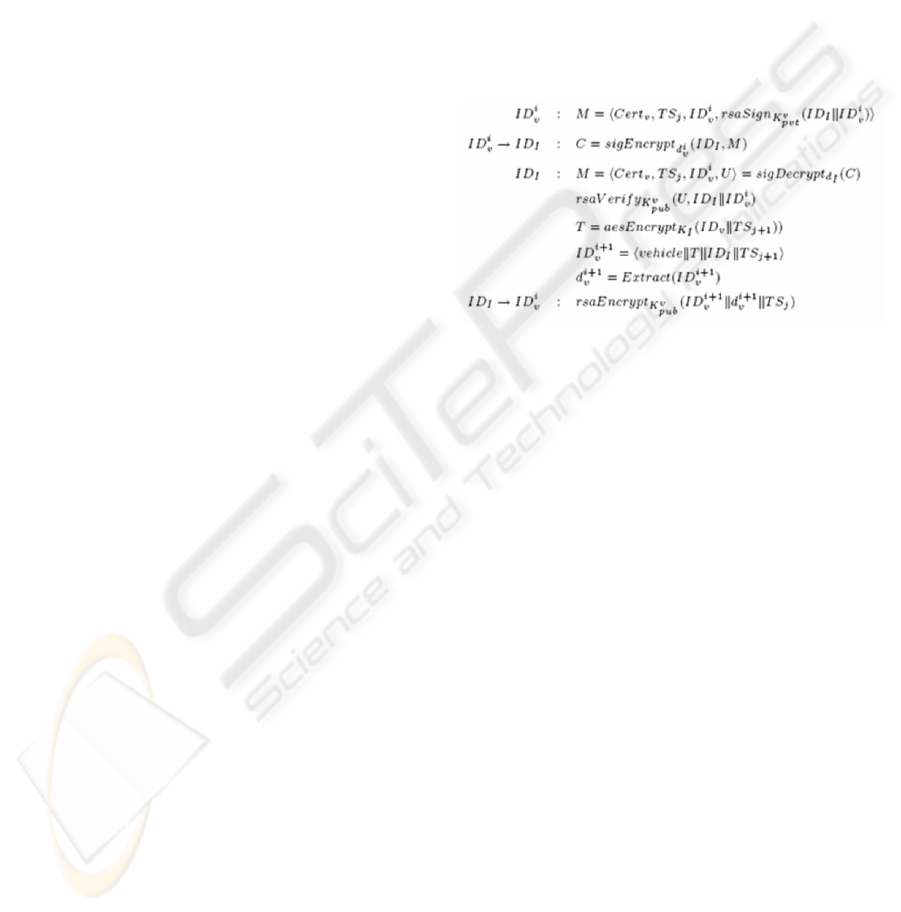
Pseudonym Generation: We assume that RSUs
have up-to-date CRLs and that they will only issue a
new pseudonym only if the vehicle's credentials
have not been revoked. When a vehicle needs to get
a new pseudonym, it engages a RSU as follows:
Secure Communication: Our system provides an
implicit credential in the form of the pseudonym for
secure communication between all entities. The
pseudonym includes a time-stamp indicating the last
time some infrastructure point validated the
credentials of a vehicle. Each vehicle could set its
trust threshold as per the user's choice, in deciding
how old pseudonyms they want to trust. Once that
choice is made, we can simply validate the identity-
based signature on the message to verify that the
vehicle using the pseudonym actually has the private
key corresponding to it. The private key could only
have been generated by a RSU (or the TA) who has
the master secret s. The implicit authentication
provided by our pseudonyms is communication
efficient because it eliminates the need for certificate
exchange between vehicles and also does not require
the vehicles to download any CRL.
Non-repudiation: In case of a dispute involving
vehicles one can try to locate the cause of the
incident based on the messages exchanged between
vehicles. Vehicles can log messages into some-kind
of a black-box like device and turn these messages
over to an arbiter. We assume for simplicity that the
arbiter is the same as the TA and has access to the
secret key database (containing secret keys of the
RSUs). Suppose vehicle ID
b
hands over a message
M and corresponding signature hU;Wi stating it was
sent by vehicle pseudonym ID
i
a to pseudonym IDi
A NOVEL MODULAR BLACK-BOX ARCHITECTURE FOR SECURE VEHICULAR NETWORKS
101

b. The arbiter will validate if the message indeed
was created and signed by IDi a, intended for IDi b
and then will decipher as to which real vehicle ID's
these pseudonyms belong to. This mechanism works
as follows:
The advantage of this scheme is that no special
storage is required in either the vehicles or the
infrastructure for each pseudonym. The message M
containing the source and destination pseudonyms
and signature are the only things that need to be
stored to settle any disputes. Further, the original
identities of the vehicles can be re-created only by a
TA with valid legal cause for such action.
6 CASE STUDY
We consider the case of a fleet management system
deployed by a private transportation company in
order to monitor the behaviour of the drivers. We
suppose that the vehicle is equipped with sensors
allowing the measurement of the following
information:
• Vehicle speed (wheel-based)
• Vehicle speed (from tachograph)
• Accelerator pedal position (0–100 %)
• Total fuel used (litre since life time)
• Fuel level (0–100 %)
• Engine speed
• Total engine hours (h)
Obviously, this application interacts with other
services defined by the regulation authority such as
highway fee payment. Using the proposed
architecture, the black-box usage scenarios in this
situation are as follows:
• Two privilege levels should be defined on the
SU: one for the monitoring administrator and the
other for the driver. The administrator is granted
read access to the data listed above while the
driver is able to define a security policy so that
the payments receipts related to highway fees are
stored in the black-box. Appropriate lifetimes
should obviously be set according to the local
laws and guidelines.
• Information related to the monitoring service as
well as the highway fee payment is stored into
the ABB. Since the data related to the driver
behaviour is collected by local sensors, it should
not be authenticated. However, the payment
receipts should be signed by the payment server.
It is important to mention that this latter should
also preserve a payment proof, which should be
different from the one sent to the client (driver)
since it includes the signatures of the different
RSUs the vehicle has crossed as well as the
signature of the driver. In fact, the identity in this
case is composed by the pseudonym
(authenticating the driver) and the vehicle
identity (that can be RFID tag).
• The data stored in the ABB, and related to the
monitoring service, should be encrypted using a
symmetric key configured by the administrator.
7 CONCLUSIONS
In this paper, we developed a novel black-box
architecture for applications provided on vehicular
networks. The major advantage of our approach is
that it allows the definition of multi-level security
policies to protect the data stored within the back-
box. The proposed architecture allows a better
segregation of duties during the data analysis phase
since a main black-box has been considered for
long-term storage while an auxiliary black-box is
used for medium-term and short-term storage. Space
quota and lifetime policies are therefore used to
support this reasoning.
REFERENCES
Qiang Wu, Kebin Jia, Xuwen Li., 2008. Study on Vehicle
Video Blackbox with Acceleration Sensitive Function,
International Conference on MultiMedia and
Information Technology, p.833-836.
Gabauer, D. J., and Gabler, H. C., 2005. Evaluation of
Acceleration Severity Index Threshold Values
Utilizing Event Data Recorder Technology, Transpor-
tation Research Record: Journal of the Transportation
Research Board, No. 1904, Transportation Research
Board of the National Academies, pp. 37-45,
Washington, DC.
Claudia Kratzsch, Heidi Kroemker., 2009. Vehicle-To-
Vehicle Communication For Enhanced Integrated
Safety, 21st International Technical Conference on the
Enhanced Safety of Vehicle, June 15–18, Stuttgart,
Germany.
DCNET 2010 - International Conference on Data Communication Networking
102

The Florida Senate, 2009. Committee on Commerce, Issue
Brief 2010-305 Automobile Event Data Recorders.
October 2009.
Clemens Kaufmann, Christine Tureschek., 2008.
Connecting Black Box Data and Driving Behaviour
Observation for Better Understanding of Driving
Behaviour, European Conference on Human Centred
Design for Intelligent Transport Systems - Lyon,
France, April 3-4, 2008
Maxim Raya, Panos Papadimitratos, Jean-Pierre Hubaux.,
2006. Securing Vehicular Networks, Poster at IEEE
Infocom2006 (Infocom April 2006), Barcelona, Spain.
Deborah Sapper, Henry Cusack, Lisa Staes., 2009.
Evaluation of Electronic Data Recorders for Incident
Investigation, Driver Performance and Vehicle
Maintenance, Project #BD549-50, Center for Urban
Transportation Research University of South Florida,
September 2009.
Aleecia M. McDonald , Lorrie Faith Cranor., 2006. How
Technology Drives Vehicular Privacy, A Journal of
Law and Policy for the Information Society, Volume
2, Issue 3, http://www.is-journal.org/
Mhamed Chammem, Mohamed Hamdi, and Noureddine
Boudriga,. 2009. A Platform for Secure Multi-Service
Vehicular Communication, Int. Conference on Ultra
Modern Telecommunications (ICUMT’09), 12-14 Oct,
2009, St Petersbourg, Russia.
Milind Khanapurkar, Dr. Preeti Bajaj, Dakshata Gharode.,
2008. A Design Approach for Intelligent Vehicle
Black Box System with Intra-vehicular
communication using LIN/Flex-ray Protocols, IEEE
International Conference on Industrial Technology,
Sichuan University, Chengdu, China, April 21-24,
(IEEE ICIT 2008)
Hampton C. Gabler and al., 2004. Use of Event Data
Recorder (EDR) Technology for Highway Crash Data
Analysis, National Cooperative Highway Research
Program, Project 17-24, Final Report
John Pierowicz, Daniel P. Fuglewicz, Glenn Wilson.,
2004. Development of Requirements and Functional
Specifications for Crash Event Data Recorders, Final
Report, December 2004 USDOT Contract: DTFH61-
01-C-00182, Task Order Number: BZ82B007
Anthony Marino, John Schmalzel., 2007. Area Network
for In-Vehicle Law Enforcement Applications, SAS
2007 - IEEE Sensors Applications Symposium San
Diego, California USA, 6-8 February 07
Carfax, 2010. Vehicle Identification Number, a CARFAX
vehicle history report, Website http://
www.carfax.com/, Last visit February, 26, 2010.
D. Boneh and M. Franklin., 2001. Identity-based
encryption from the Weil pairing, Lecture Notes in
Computer Science.
A NOVEL MODULAR BLACK-BOX ARCHITECTURE FOR SECURE VEHICULAR NETWORKS
103
