
TOWARDS OBJECT-ORIENTED SOFTWARE DEVELOPMENT FOR
INDUSTRIAL ROBOTS
∗
Facilitating the Use of Industrial Robots by Modern Software Engineering
Alwin Hoffmann, Andreas Angerer, Andreas Schierl, Michael Vistein and Wolfgang Reif
Institute for Software & Systems Engineering, University of Augsburg, Augsburg, Germany
Keywords:
Industrial robotics, Object-oriented software development, Robot programming, Software engineering.
Abstract:
Industrial robotics is characterized by sophisticated mechanical components and highly-developed control
algorithms. However, the efficient use of robotic systems – with regard to flexibility, reusability and exten-
sibility – is very much limited by existing programming methods. As a consequence, software development
for industrial robots is a complex and time-consuming task which generates considerable costs. This work
performs an analysis of the current software development for robotics systems and identifies shortcomings
from a software engineering point of view. Based on that, it outlines an architectural approach that addresses
the identified problems and allows efficient software development for industrial robotic systems.
1 INTRODUCTION
According to ISO standard 8373, an industrial robot
is defined as “an automatically controlled, repro-
grammable, multipurpose manipulating machine [...]
for use in industrial automation applications”. Given
an appropriate tool, industrial robots are able to per-
form a large variety of tasks ranging from assembly
over welding to quality assurance. But when look-
ing deeper, the use of robots in companies is mostly
restricted to mass production with rather easy, re-
curring tasks. Although small and medium enter-
prises with their small production batches could bene-
fit from flexible production systems, industrial robots
are rarely found there. One major reason for the lim-
ited use is the way of adapting robots to perform a
task. Today, industrial robots are still programmed
with special robot programming languages which
have robotic-specific data types, allow the specifica-
tion of motions, and communicate with external de-
vices and systems via fieldbus (e.g. tools, sensors, or
PLCs). Programs written in these languages are ex-
ecuted in special runtime environments by stepwise
interpretation of instructions and submitting them to
the underlying robot controller.
∗
This work presents results of the research project Soft-
Robot funded by the European Union and the Bavarian
government within the High-Tech-Offensive Bayern. The
project is carried out together with KUKA Roboter GmbH
and MRK-Systeme GmbH.
Due to these low-level programming techniques,
developing software for an industrial robot is a com-
plex and tedious task requiring considerable techni-
cal expertise. Already in 1990, (Miller and Lennox,
1990) identified the fundamental problems of pro-
gramming robots which are still relevant in indus-
trial robotics even two decades later. The problems
mentioned are e.g. high costs for application develop-
ment, low reusability of robot-specific source code,
and the complexity of extending existing applications
with new tasks or devices. Despite these problems, re-
search in software engineering for robotics is mostly
targeting experimental robotics (Brugali, 2007), be-
cause industrial robotics has been considered an al-
ready solved problem for a long time (H
¨
agele et al.,
2008).
Hence, this paper analyzes the software develop-
ment for robotics systems and explains why the cur-
rent practice has shortcomings from a software en-
gineering point of view (Sect. 2). Subsequently, we
briefly present an object-oriented approach that can
overcome those shortcoming in Sect. 3 and illustrate
the possible benefits in Sect. 4. Finally, conclusions
and future work are presented in Sect. 5.
2 PROBLEM ANALYSIS
Software development for commercially available in-
437
Hoffmann A., Angerer A., Schierl A., Vistein M. and Reif W. (2010).
TOWARDS OBJECT-ORIENTED SOFTWARE DEVELOPMENT FOR INDUSTRIAL ROBOTS - Facilitating the Use of Industrial Robots by Modern
Software Engineering.
In Proceedings of the 7th International Conference on Informatics in Control, Automation and Robotics, pages 437-440
DOI: 10.5220/0003002304370440
Copyright
c
SciTePress

dustrial robots is usually performed using the devel-
opment tools available from the robot manufactur-
ers, where each manufacturer provides its own sys-
tem. These systems are mostly based on propri-
etary, special programming languages which are tai-
lored to the features of the underlying robot con-
troller. Examples are the KUKA Robot Language or
RAPID from ABB. These languages are rather lim-
ited compared to general-purpose programming lan-
guages. For example, there is no built-in support
for the development of graphical user interfaces, and
interaction with tools and external systems is based
on low-level fieldbus communication. On the other
hand, these languages focus on the basic features of
automation systems and these limitations help ensur-
ing safety and real-time capabilities, which are nec-
essary to achieve precision and repeatability. Based
on their basic languages, manufacturers provide pro-
gramming extensions for special application domains
like welding. These extensions contain macros for
common application-specific tasks and allow to con-
figure tools.
However, with increasing requirements to the ap-
plications, using robot programming languages alone
is not sufficient any more. Especially user interac-
tion or complex domain-specific application logic is
often realized using a general-purpose programming
language, while robot languages are only used for
moving the robot and triggering exactly timed tool ac-
tions. The interplay between such an application and
the robot controller depends on the use case. One ap-
proach is to generate robot source code and to trans-
fer it to the robot controller. This approach is often
used in off-line programming systems where a virtual
model of the robotic workcell is used to program and
simulate tasks.
A different approach is to use a pre-defined set
of robot programs which can be remotely parameter-
ized and executed by an application. Today, such a
mixed application structure is typical for many exist-
ing solutions in industrial robotics. For example, (Ge
and Yin, 2007) describe the implementation of a plas-
tic injection molding application using the general-
purpose programming language C# for the domain
logic and the graphical user interface whereas RAPID
was only used for commanding the robot. Another
example is described by (Pires et al., 2009) where
a programming-by-demonstration application is pre-
sented. The main application as well as a speech inter-
face were again realized with C#. Although the force-
controlled guiding system was directly implemented
on the robot controller, it is forwarding its data to the
main application for further processing. After hav-
ing taught a new task by demonstration, robot code
is generated and submitted to the controller. As these
examples show, it is possible to implement complex
domain-specific applications and customized user in-
terfaces on top of existing robot programming envi-
ronments. However, the result is always an individual
solution, requiring great effort and expertise for devel-
opment and, consequently, causing high costs. Eval-
uating these solutions from a software engineering
point of view shows shortcomings in software quality.
While functionality and usability is often increased
using such approaches, other quality attributes (i.e.
reliability, performance, maintainability, extensibility
or portability) are influenced negatively. For example,
robot motions that are triggered inside an application
must always be backed with appropriate programs
on the robot controller. Consequently, both applica-
tion parts have to be maintained or extended carefully
with mutual dependencies in mind. Approaches that
rely on automatic generation of robot control code
provide a higher level of extensibility (by modifying
code generators) and increase portability (with multi-
ple code generators). However, maintainability prob-
lems arise when generated code has to be adjusted: In
most cases, these adjustments cannot be transferred
back to the generating model. Further issues concern
performance (especially for code generation) and reli-
ability, as concurrent programs are difficult to predict,
test and debug.
Standard business applications are nowadays de-
veloped on top of modern frameworks like Microsoft
.NET or Java Enterprise Edition. These frameworks
offer solutions for many standard problems like com-
munication in distributed systems, persistency and se-
curity. Our goal is to show that with a novel approach
robotic applications can be developed in the same
way as business applications. By providing a robotic
framework that already incorporates the required in-
frastructure solutions, such an approach can increase
productivity, reduce costs and weaken the trade-off
between functionality and software quality.
3 APPROACH
We have analyzed a broad variety of typical tasks for
industrial robots (e.g. welding or palletizing). This
analysis has shown that robot programs usually con-
sist of a defined set of real-time critical control actions
which are embedded into a high-level work flow. For
example, welding a single seam on a workpiece is one
real-time critical action consisting of operations of
the welding torch during the robot’s movement. The
work flow of a welding application only coordinates
the proper execution of these actions in order to weld
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
438
Realtime Primitive Interface (RPI)
Robot Control Core (RCC)
RT Primitive Specification
Parameter specification
RT Primitive Implementation
Parameters
Basic primitives Extension primitives
RT Primitive Specification
Parameter specification
RT Primitive Implementation
Parameters
Dynamic Realtime Primitive Net Construction
Robotics Base Class Libraries
Robotics API
Robotics Class Libraries
Robotics Extension Class Libraries
Graphical Robot Programming
Framework
Specialized LibrariesApplication Service
Application Service Application …
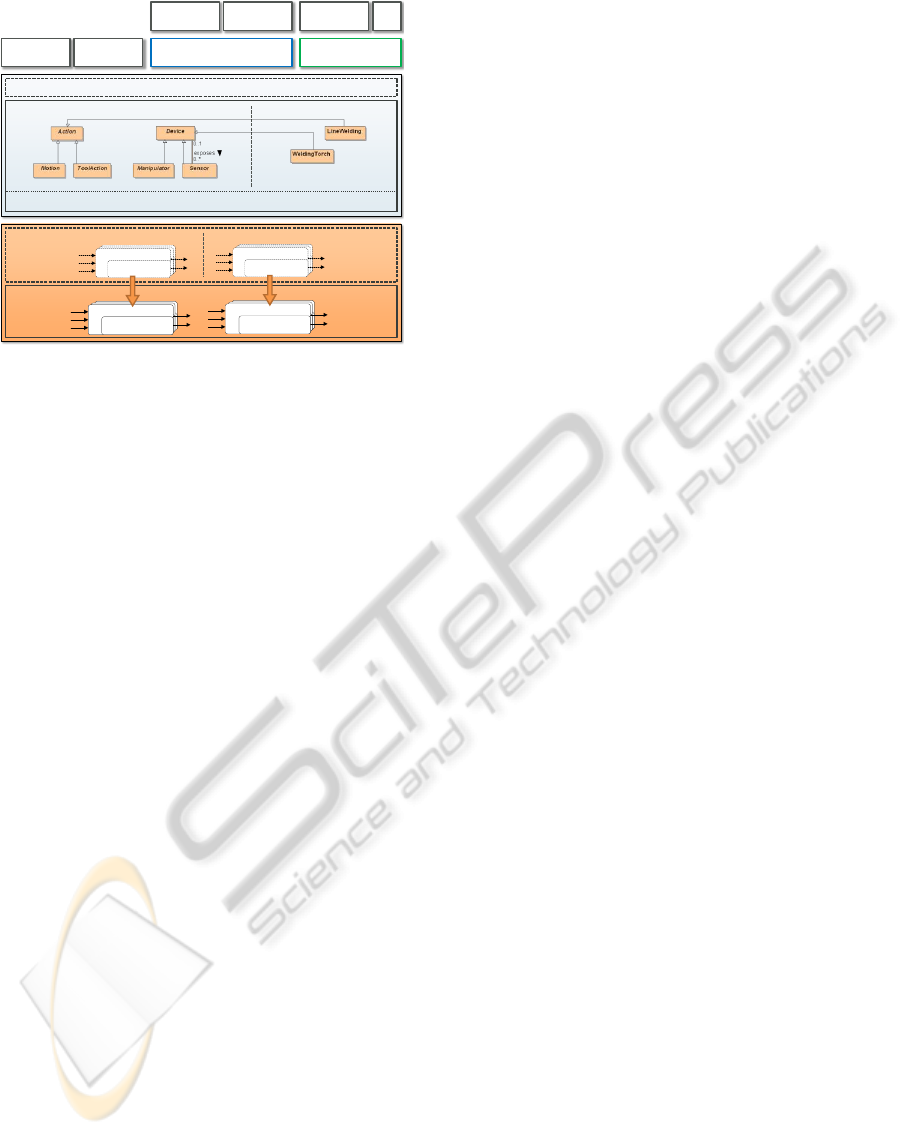
Figure 1: The components of the proposed multi-tier soft-
ware architecture.
a series of seams. Hence, if it is possible to create
an adequate abstraction layer for encapsulating such
real-time critical actions, robotic applications can be
programmed in any programming language or envi-
ronment regardless of real-time issues.
Based on this observation, we have developed a
multi-tiered software architecture (Hoffmann et al.,
2009) which is shown in Figure 1. Core part of this
architecture are the Robotics Base Class Libraries
(RBCL). They represent an object-oriented frame-
work for robotic applications and provide an abstract
class model for the industrial robotics domain as well
as the aforementioned abstraction layer for specify-
ing real-time critical actions. The domain model pro-
vides objects for common concepts like robots, tools,
frames or instructions (e.g. motions or tool actions).
They can be extended in order to encapsulate task-
specific functionality (e.g. for arc welding) or to add
new robots, tools and sensors. All functionality ex-
posed by the RBCL and their extensions (Robotics
Extension Class Libraries) forms the Robotics Appli-
cation Programming Interface (Robotics API). This
interface is intended to be a broad platform for devel-
opers of robot programs. At the moment, there exists
an implementations of the RBCL in C# which is able
to control KUKA lightweight robots.
Instructions of the Robotics API can either be ex-
ecuted independently of each other, or be combined
to larger instruction units by certain operators with
defined semantics (e.g. temporal delay, superposi-
tion). When executed independently, no hard guaran-
tees can be given concerning timing relations across
multiple instructions. When executing complex in-
structions that have been pre-combined using one of
the aforementioned operators, real-time determinis-
tic execution is guaranteed. To achieve this, all in-
structions are dynamically translated into commands
for the Realtime Primitives Interface (RPI) and exe-
cuted by a Robot Control Core (RCC). Such an RPI
command consists of a combination of certain, pre-
defined (yet extendable) calculation modules, and a
specification of the data flow among them. Imple-
menting only the RCC with real-time aspects in mind
is sufficient to allow the atomic execution of Robotics
API instructions under real-time conditions.
4 BENEFITS
Using this approach, applications for industrial robots
can be mainly developed using standard technologies
and environments. For example, a modern general-
purpose programming language such as C# and a de-
velopment environment such as Microsoft Visual Stu-
dio can be used. Common functionality of industrial
robots is provided through a well-defined and exten-
sible application programming interface (the Robotics
API), and can be easily used by application develop-
ers. In consequence, they are able to focus on solving
domain-specific problems and, as far as possible, do
not have to deal with issues like communication and
synchronization with the robot control or real-time
programming.
Furthermore, the Robotics API provides a com-
prehensive, abstract model of the robotics domain –
including physical objects, interesting points on those
objects and ways to define specialized devices (e.g. a
welding robot). This framework can be used to for-
mulate certain tasks that are specific to the applica-
tions of interest (e.g. welding a line on a workpiece).
Basic functionality can be reused, in particular exist-
ing mechanisms for encapsulating real-time critical
work flows (e.g. moving along a welding line with ex-
actly timed activation of a welding torch). With this
abstraction, existing development processes, meth-
ods and tools of modern software engineering can
be used to construct intuitive domain specific appli-
cations, regardless of real-time issues. As a conse-
quence, complex application logic and high usabil-
ity can be achieved, whereas maintainability, perfor-
mance and reliability are taken care of by the auto-
matic generation and execution of RPI commands.
Besides basic motion commands, our architecture
also supports the integration of new motion types.
The fine grained structure of RPI allows a flexi-
ble specification of motion control algorithms as e.g.
required for sensor integration and compliant mo-
tions. The tight integration of high-level motion spec-
ification and low-level motion execution, which is
achieved by the automatic generation and execution
TOWARDS OBJECT-ORIENTED SOFTWARE DEVELOPMENT FOR INDUSTRIAL ROBOTS - Facilitating the Use
of Industrial Robots by Modern Software Engineering
439

of RPI commands, leads to good maintainability of
resulting applications, and real-time constraints can
be satisfied by an appropriate implementation of an
RPI interpreter, ensuring performance and reliability
for the critical system parts.
Traditionally, the communication with external
devices and systems is performed using a fieldbus that
is connected to a port with analog and digital I/Os.
In our approach, the physical I/Os can be mapped to
logical units, e.g. the necessary I/Os to drive a gripper
can be controlled using a single gripper object. This
object encapsulates the properties, i.e. the configura-
tion, as well as the behavior of the tool and can be
used for programing. Besides, complex devices can
be controlled with real-time performance by introduc-
ing specialized RPI modules and corresponding ob-
jects for the Robotics API. Furthermore, instructions
usually incorporate a two-stage error handling. If an
error occurs during the execution of the instruction,
basic error handling causes the robot system to reach
a stable and secure state. Subsequently, an exception
is thrown and a high-level recovery strategy can be ex-
ecuted. Thus, it is possible to guarantee reliable error
handling and to provide high-level error mechanisms
that developers can use.
There are some tasks which require the use of
multiple robots, e.g. mobile manipulation scenarios
or lifting large and heavy workpieces. Traditionally,
each robot has its own controller and must be pro-
grammed individually, using fieldbus communication
or special markers to handle synchronization with the
other robots. Using our approach, it is possible to de-
velop a single program that controls multiple robots.
The robots can be synchronized with real-time perfor-
mance using special operators offered by the Robotics
API. It is even possible to define a logical unit, that
consists of multiple robots, but can be programed as
a single robot (e.g. for load sharing, or for a mobile
manipulator).
5 CONCLUSIONS
This paper presents a new approach for the software
development for industrial robots – an approach that
is rather radical. Its focus does not originate from
mechanical engineering or control theory, but from
software engineering. Furthermore, it is not directly
compatible with current robot controllers and even
requires a new generation of robot control software.
However, it shows a way to overcome the intrinsic
problems and limitations of current programming en-
vironments for industrial robots. The development of
this approach is performed in tight cooperation with
industrial partners: KUKA Roboter GmbH, a special-
ist for robotics internals and Europe’s leading robot
manufacturer, and MRK Systeme GmbH, a system in-
tegrator working with KUKA robot and future user of
our approach. This cooperation and the joint devel-
opment of prototypical systems helped greatly in val-
idating the feasibility and industrial meaningfulness
of our research.
The presented approach promises advantages on
the feature side – as it was designed with extensibility
in mind – but the main benefits can be found coping
with non-functional requirements. Most notably, us-
ability and maintainability benefit from the advances
achieved in the field of software engineering during
the last 15 years, which can directly be applied to the
robotics domain using our approach. Although the
benefits and first results are promising, the approach
must demonstrate its advantages in practice. There-
fore, future work focuses on creating challenging ap-
plication examples on top of our approach. This in-
cludes the development of a reusable graphical robot
programming framework for SMEs and the introduc-
ing of service-oriented architectures for robot-based
automation processes.
REFERENCES
Brugali, D., editor (2007). Software Engineering for Ex-
perimental Robotics. Springer Tracts in Advanced
Robotics. Springer.
Ge, J. G. and Yin, X. G. (2007). An object oriented
robot programming approach in robot served plas-
tic injection molding application. In Robotic Weld-
ing, Intelligence & Automation, volume 362 of Lect.
Notes in Control & Information Sciences, pages 91–
97. Springer.
H
¨
agele, M., Nilsson, K., and Pires, J. N. (2008). Indus-
trial robotics. In Siciliano, B. and Khatib, O., editors,
Springer Handbook of Robotics, chapter 42, pages
963–986. Springer, Berlin, Heidelberg.
Hoffmann, A., Angerer, A., Ortmeier, F., Vistein, M., and
Reif, W. (2009). Hiding real-time: A new approach
for the software development of industrial robots. In
Proc. 2009 IEEE/RSJ Intl. Conf. on Intelligent Robots
and Systems, St. Louis, USA.
Miller, D. J. and Lennox, R. C. (1990). An object-oriented
environment for robot system architectures. In Proc.
1990 IEEE Intl. Conf. on Robotics and Automation,
pages 352–361, Cincinnati, Ohio, USA.
Pires, J. N., Veiga, G., and Ara
´
ujo, R. (2009). Programming
by demonstration in the coworker scenario for SMEs.
Industrial Robot, 36(1):73–83.
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
440
