
GENETIC HEURISTICS FOR REDUCING MEMORY ENERGY
CONSUMPTION IN EMBEDDED SYSTEMS
Maha Idrissi Aouad
INRIA Nancy, Grand Est / LORIA, 615 Rue du Jardin Botanique, 54600 Villers-L
`
es-Nancy, France
Ren
´
e Schott
IECN, LORIA, Nancy-Universit
´
e, Universit
´
e Henri Poincar
´
e, 54506 Vandoeuvre-L
`
es-Nancy, France
Olivier Zendra
INRIA Nancy, Grand Est / LORIA, 615 Rue du Jardin Botanique, 54600 Villers-L
`
es-Nancy, France
Keywords:
Energy consumption reduction, Genetic heuristics, Memory allocation management, Optimizations.
Abstract:
Nowadays, reducing memory energy has become one of the top priorities of many embedded systems design-
ers. Given the power, cost, performance and real-time advantages of Scratch-Pad Memories (SPMs), it is not
surprising that SPM is becoming a common form of SRAM in embedded processors today. In this paper, we
focus on heuristic methods for SPMs careful management in order to reduce memory energy consumption.
We propose Genetic Heuristics for memory management which are, to the best of our knowledge, new origi-
nal alternatives to the best known existing heuristic (BEH). Our Genetic Heuristics outperform BEH. In fact,
experimentations performed on our benchmarks show that our Genetic Heuristics consume from 76.23% up
to 98.92% less energy than BEH in different configurations. In addition they are easy to implement and do not
require list sorting (contrary to BEH).
1 INTRODUCTION
Reducing energy consumption of embedded systems
is a topical and very crucial subject. Many sys-
tems are energy-constrained and, despite batteries
progress, these systems still have a limited auton-
omy. Numerous systems are concerned: small one
and large one. Small systems are mainly our daily
life objects, such as: cell phones, laptops, PDAs, MP3
players, etc. For the large systems, we have clusters,
mainframes, super computers, etc. These systems are
more and more energy greedy. Accordingly, memory
will become the major energy consumer in an embed-
ded system. In fact, trends in (ITRS, 2007) show that
Systems on Chip (SoC) consumption is dominated
by dynamic and static memory consumption and that
memory will occupy a larger place in SoC.
Thus, different options to save energy, hence in-
crease autonomy, exist. These various approaches can
be classified in two main categories: hardware opti-
mizations and software optimizations. Hardware
techniques fall beyond the scope of this paper, but a
large amount of literature about them is available (see
first parts of (Graybill and Melhem, 2002)). In this
paper, we will focus on software, compiler-assisted
techniques in order to optimize energy consumption
in memory.
Most authors rely on Scratch-Pad Memories
(SPMs) rather than caches. The interested reader can
look at (Benini and Micheli, 2000) for a comprehen-
sive list of references. Cache memories, although they
help a lot with program speed, do not always fit in
embedded systems. In fact, cache memory is ran-
dom access memory (RAM) that a computer micro-
processor can access more quickly than it can access
regular RAM. As the microprocessor processes data,
it looks first in the cache memory and if it finds the
data there (from a previous reading of data), it does
not have to do the more time-consuming reading of
data from larger memory (Tanenbaum, 2005). But
caches increase the system size and its energy cost be-
cause of cache area plus managing logic. In contrast,
394
Idrissi Aouad M., Schott R. and Zendra O. (2010).
GENETIC HEURISTICS FOR REDUCING MEMORY ENERGY CONSUMPTION IN EMBEDDED SYSTEMS.
In Proceedings of the 5th International Conference on Software and Data Technologies, pages 394-402
DOI: 10.5220/0003002503940402
Copyright
c
SciTePress

SPMs have interesting features. SPM also known as
local store in computer terminology, is a high-speed
internal memory used for temporary storage of calcu-
lations, data, and other work in progress. It can be
considered as similar to an L1 cache in that it is the
memory next closest to the ALU’s after the internal
registers, with explicit instructions to move data from
and to main memory. Like cache, therefore, SPM
consists of small, fast SRAM, but the main difference
is that SPM is directly and explicitly managed at the
software level, either by the developer or by the com-
piler, whereas cache requires extra dedicated circuits.
Its software management makes it more predictable
as we avoid cache miss cases which is an important
feature in real-time embedded systems. Compared
to cache, SPM thus has several advantages (Idrissi
Aouad and Zendra, 2007). SPM requires up to 40%
less energy and 34% less area than cache (Banakar
et al., 2002). Further, the run-time with an SPM us-
ing a simple static knapsack-based (Banakar et al.,
2002) allocation algorithm is 18% better as compared
to a cache. Contrarily to (Banakar et al., 2002), (Ben
Fradj et al., 2005) distinguish between static and dy-
namic energy. They also show the effectiveness of us-
ing an SPM in a memory architecture where a saving
about 35% in energy consumption is achieved when
compared to a memory architecture without an SPM.
(Absar and Catthoor, 2006) use statistical methods
and the Independent Reference Model (IRM) to prove
that SPMs, with an optimal mapping based on ac-
cess probabilities, will always outperform the direct-
mapped cache, irrespective of the layout influencing
the cache behavior. Additionally, SPM cost is lower.
The rest of the paper is organized as follows. Sec-
tion 2 describes some existing heuristics and related
works for managing memory data allocation. Section
3 presents our approach based on Genetic Heuristics
to find the optimized memory data allocation in order
to reduce energy consumption. Section 4 gives the
memory energy consumption model we used in or-
der to estimate the energy consumed by our different
heuristics. Section 5 shows the various experimen-
tal results obtained. Finally, Section 6 concludes and
gives some perspectives.
2 EXISTING HEURISTICS AND
RELATED WORKS
The approaches presented in this section try to help in
determining the optimized memory allocation in or-
der to reduce energy consumption according to mem-
ory type (access speed, energy cost, large number of
miss access cases, etc.) and application behavior. In
order to do so, these methods use profile data to gather
memory access frequency information. This informa-
tion can be collected either statistically by analyzing
the source code of the application or dynamically by
profiling the application (number of times that data is
accessed, data size, access frequency, etc.).
In these techniques, because of the reduced size
of SRAM, one tries to optimally allocate data in it
in order to realize energy savings. An approach is to
place interesting data in memory with a low access
cost (SPM) whereas the other data will be placed in a
memory with low storage cost (DRAM). Thus, most
of the authors use one of the three following strate-
gies:
Allocate Data into SPM by Size. The smaller data
are allocated into SPM as there is space available else
they are allocated in DRAM. This method has the ad-
vantage of being simple to implement since it only
considers the size of the data but has the disadvan-
tage of allocating the largest data in the main memory
(DRAM). These largest data could be often accessed,
which will imply a very few energy economy.
Allocate Data into SPM by Number of Accesses.
The most frequently accessed/used data are allocated
into SPM as there is space available else they are al-
located in DRAM. This strategy is optimal than the
previous one, since the most frequently accessed/used
data will be allocated in a memory that consumes less
energy and therefore will achieve more savings as ex-
plained and demonstrated in (Sj
¨
odin et al., 1998) and
(Steinke et al., 2002). However, we can note granular-
ity problems in some cases such as a structure which
only one part is often accessed/used.
Allocate Data Memory into SPM by Number of
Accesses and Size (BEH). This is somehow a com-
bination of the two previous strategies. The idea here
is to combine their advantages. If we consider the ex-
ample of a structure in which only a part is the most
frequently accessed/used, we take into account the av-
erage number of access to this structure. This avoids
granularity problems. Here, data are sorted according
to their ratio (access number/size) in descending or-
der. The data with the highest ratio is allocated first
into SPM as there is space available. Otherwise it
is allocated in DRAM. This heuristic uses a sorting
method which can be computationally expensive for
a large amount of data. In addition to that, this sorting
method will not work very well in a dynamic perspec-
tive where the maximum capacity of the SPM is not
known in advance. This is, so far, the best known ex-
isting heuristic (BEH).
GENETIC HEURISTICS FOR REDUCING MEMORY ENERGY CONSUMPTION IN EMBEDDED SYSTEMS
395

In these techniques, most authors model the prob-
lem as a 0/1 integer linear programming (ILP) prob-
lem and then use an available IP solver to solve it.
The main trade-offs between these approaches re-
volve around the objects considered (arrays, loops,
global, heap or stack variables, etc.). In (Avissar et al.,
2002), because of the reduced SRAM size, the least
used variables are first allocated to slower memory
banks (DRAM), while the most frequently used vari-
ables are kept in fast memory (SRAM) as much as pos-
sible. They consider global and stack variables and
choose between SPM and cache, while (Steinke et al.,
2002; Wehmeyer et al., 2004) consider global vari-
ables, functions and basic blocks and choose between
SPM banks. When (Udayakumaran et al., 2002) con-
sider static and global variables and choose between
SPM banks also. The previous techniques are all
based on the frequency of data accesses. In contrast,
another approach is to focus on data that is the most
cache-conflict prone (Panda et al., 1997), (Truong
et al., 1998). In the rest of this paper, we will refer
to the strategy BEH as a basis for our memory energy
optimizations.
3 OUR GENETIC APPROACH
Genetic algorithms (GAs) are adaptive methods which
may be used to solve search and optimization prob-
lems. They are based on the genetic processes of bio-
logical organisms (Sivanandam and Deepa, 2007).
By starting with a population of possible solutions
and changing them during several iterations, GAs
hope to converge to the fittest solution. Each solution
is represented through a chromosome, which is just
an abstract representation. The process begins with a
set of potential solutions or chromosomes that are ran-
domly generated or selected. Over many generations,
natural populations evolve according to the principles
of natural selection and survival of the fittest. For gen-
erating new chromosomes, GA can use both crossover
and mutation techniques. Crossover involves splitting
two chromosomes and then, for example, combining
one half of each chromosome with the other pair. Mu-
tation involves flipping a single bit of a chromosome.
The chromosomes are then evaluated using a certain
fitness criterion and the ones which satisfy the most
this criterion are kept while the others are discarded.
This process repeats until the population converges
toward the optimal solution. The basic genetic algo-
rithm is summarized in Figure 1.
There are several advantages to the Genetic Al-
gorithm such as their parallelism and their liability.
They require no knowledge or gradient information
SELECT random population of n chromosomes.
EVALUATE the fitness f(x) of each chromosome
x in the population.
LOOP
SELECT two parent chromosomes from a
population.
CROSS OVER the parents to form new children
with a crossover probability Pc.
MUTATE new children with a mutation
probability Pm.
Place new offspring in the new population.
Use new generated population for a further
sum of the algorithm.
EXIT if the end condition is satisfied and
return best solution.
END LOOP
Figure 1: A basic genetic algorithm.
about the response surface, they are resistant to be-
coming trapped in local optima and they perform
very well for large-scale optimization problems. GAs
have been used as heuristics to solve difficult prob-
lems (such as NP-hard problems) for machine learn-
ing and also for evolving simple programs. Applica-
tions of Genetic Algorithms include: nonlinear pro-
gramming, stochastic programming, signal process-
ing and combinatorial optimization problems such as
the Traveling Salesman Problem, Knapsack Problem,
sequence scheduling, graph coloring (just to name a
few). For further applications, the interested reader
can see (Zheng and Kiyooka, 1999).
3.1 Our Optimization Problem
Our problem is a combinatorial optimization problem
like the famous knapsack problem (H. Kellerer and
Pisinger, 2004). Suppose memory is a big knapsack
and data are items. We want to fill this knapsack that
can hold a total weight of W with some combination
of items from a list of N possible items each with
weight w
i
and value v
i
so that the value of the items
packed into the knapsack is maximized. This problem
has a single linear constraint, a linear objective func-
tion which sums the values of the items in the knap-
sack, and the added restriction that each item will be
in the knapsack or not.
If N is the total number of items, then there are 2
N
subsets of the item collection. So an exhaustive search
for a solution to this problem generally takes expo-
nential running time. Therefore, the obvious brute
force approach is infeasible. Some dynamic program-
ming techniques also have exponential running time,
but have proven useful in practice. Here, we take a
different approach, and investigate the problem using
genetic methods. In this paper, we propose a heuris-
tic based on GAs to solve the problem of optimizing
ICSOFT 2010 - 5th International Conference on Software and Data Technologies
396

the memory data allocation in order to reduce mem-
ory energy consumption. This heuristic outperforms
the best known existing heuristic (BEH) presented in
Section 2 and the Tabu Search heuristic presented in
(Idrissi Aouad et al., 2010).
3.2 Key Elements
In this section, we explain some basic terminologies
and operators we used with our Genetic Heuristics.
• Individual. An individual is a single solution.
• Population. A population is a collection of indi-
viduals. The two important aspects of population
used in GAs are the initial population generation
and the population size. For each problem, the
population size will depend on the complexity of
the problem. Ideally, the initial population should
have a gene pool as large as possible in order to
be able to explore the whole search space. Hence,
to achieve this, the initial population is, in most
of the cases, chosen randomly. In our case, we
randomly selected the initial population.
• Encoding. If N is the total number of data, then
a solution point is just a finite sequence s of N
terms such that s[n] is either 0 or the size of the
n
th
data. s[n] = 0 if and only if the n
th
data is
not selected in the solution point. This solution
must satisfy the constraint of not exceeding the
maximum SPM capacity (i.e.
∑
N
i=1
s[i] ≤ C).
• Fitness. The fitness of an individual is the value
of an objective function. The fitness not only in-
dicates how good the solution is, but also corre-
sponds to how close the chromosome is to the op-
timal one. In our Genetic Heuristic, at each stage
(generation), the solution points are evaluated for
fitness (according to how much of the memory ca-
pacity they fill), and the best and worst performers
are identified.
• Crossover. Crossover is the process of taking
two parent solutions and producing from them a
child. After the selection process, the population
is enriched with better individuals. Here, when
conditions are ripe for breeding, the best solution
mates with a random (non-extreme) solution, and
the offspring replaces the worst one. The child
inherits a part of each parent’s genes. In our Ge-
netic Heuristic, we used the following crossover
techniques and probability:
– Single Point Crossover. The two mating chro-
mosomes are cut once at a randomly selected
crossover point and the sections after the cuts
are exchanged.
– Two Points Crossover. In two points
crossover, two crossover points are chosen ran-
domly and the contents between these points
are exchanged between two mated parents.
– Crossover Probability. Crossover Probabil-
ity (P
c
) is a parameter to describe how often
crossover will be performed. If there is no
crossover, offspring are exact copies of par-
ents. If P
c
= 1, then all offspring are made by
crossover. If P
c
= 0, whole new generation is
made from exact copies of chromosomes from
old population. Crossover is made in hope that
new chromosomes will contain good parts of
old chromosomes and therefore the new chro-
mosome will be better.
• Mutation. Mutation prevents the algorithm to be
trapped in local optima. It is seen as a background
operator to maintain genetic diversity in the pop-
ulation by varying the gene pool. The genes of a
solution are just its sequence terms. In our Ge-
netic Heuristic, a mutation of a solution is a ran-
dom change of up to half of its current genes. A
gene change sets a term to 0 if the term is currently
nonzero, and sets a term to the corresponding data
size if the term is currently zero.
– Mutation Probability. The mutation proba-
bility (P
m
) decides how often parts of chromo-
some will be mutated. If there is no muta-
tion, offspring are generated immediately after
crossover without any change. If P
m
= 1, whole
chromosome is changed, if P
m
= 0, nothing is
changed. Mutation should not occur very often,
because then GA will in fact change to random
search.
• Search Termination. The termination or conver-
gence criterion brings the search to a halt. There
are various stopping conditions: the maximum
number of generations reached, after a specified
time has elapsed, if there is no change to the
population’s best fitness for a specified number
of generations or during an interval of time, etc.
Here, we stop the Genetic Heuristic after a certain
amount of time.
4 MEMORY ENERGY
ESTIMATION MODEL
In order to compute the energy cost of the system
for each configuration, we propose in this section an
energy consumption estimation model for our con-
sidered memory architecture composed by an SPM,
GENETIC HEURISTICS FOR REDUCING MEMORY ENERGY CONSUMPTION IN EMBEDDED SYSTEMS
397
a DRAM and an instruction cache memory. In our
model, we distinguish between the two cache write
policies: write-through and write-back. In a Write-
Through cache (WT), every write to the cache causes
a synchronous write to the DRAM. Alternatively, in a
Write-Back cache (WB), writes are not immediately
mirrored to the main memory. Instead, the cache
tracks which of its locations have been written over
and then, it marks these locations as dirty. The data in
these locations is written back to the DRAM when
those data are evicted from the cache (Tanenbaum,
2005). Our proposed energy consumption estimation
model is presented below:
E = E
tspm
+ E
tic
+ E
tdram
E = N
spmr
∗ E
spmr
(1)
+ N
spmw
∗ E
spmw
(2)
+
N
icr
∑
k=1
[h
i
k
∗ E
icr
+ (1 − h
i
k
) ∗ [E
dramr
+ E
icw
+(1 −WP
i
) ∗ DB
i
k
∗ (E
icr
+ E
dramw
)]] (3)
+
N
icw
∑
k=1
[W P
i
∗ E
dramw
+ h
i
k
∗ E
icw
+ (1 −W P
i
) ∗
(1 − h
i
k
) ∗ [E
icw
+ DB
i
k
∗ (E
icr
+ E
dramw
)]](4)
+ N
dramr
∗ E
dramr
(5)
+ N
dramw
∗ E
dramw
(6)
Lines (1) and (2) represent respectively the total
energy consumed during a reading and during a writ-
ing from/into SPM. Lines (3) and (4) represent re-
spectively the total energy consumed during a read-
ing and during a writing from/into instruction cache.
When, lines (5) and (6) represent respectively the total
energy consumed during a reading and during a writ-
ing from/into DRAM. The various terms used in our
energy consumption estimation model are explained
in Table 1.
5 EXPERIMENTAL RESULTS
For our experiments, we consider a memory archi-
tecture composed by a Scratch-Pad Memory, a main
memory (DRAM) and an instruction cache mem-
ory. We make sure to take similar features for the
cache memory and the SPM in order to compare
their energy performance fairly. We performed ex-
periments with eleven benchmarks from six differ-
ent suites: MiBench (Guthaus et al., 2001), SNU-
RT, M
¨
alardalen, Mediabenchs, Spec 2000 and Wcet
Benchs. Table 2 gives a description of these bench-
marks.
Table 1: List of terms.
Term Meaning
E
tspm
Total energy consumed in SPM.
E
tic
Total energy consumed in instruction
cache.
E
tdram
Total energy consumed in DRAM.
E
spmr
Energy consumed during a reading
from SPM.
E
spmw
Energy consumed during a writing
into SPM.
N
spmr
Reading access number to SPM.
N
spmw
Writing access number to SPM.
E
icr
Energy consumed during a reading
from instruction cache.
E
icw
Energy consumed during a writing
into instruction cache.
N
icr
Reading access number to instruction
cache.
N
icw
Writing access number to instruction
cache.
E
dramr
Energy consumed during a reading
from DRAM.
E
dramw
Energy consumed during a writing
into DRAM.
N
dramr
Reading access number to DRAM.
N
dramw
Writing access number to DRAM.
W P
i
The considered cache write policy:
WT or WB. In case of WT, W P
i
= 1
else in case of WB then W P
i
= 0.
DB
i
k
Dirty Bit used in case of WB to
indicate during the access k if the
instruction cache line has been
modified before (DB
i
= 1) or
not (DB
i
= 0).
h
i
k
Type of the access k to the instruction
cache. In case of cache hit, h
i
k
= 1.
In case of cache miss, h
i
k
= 0.
In order to compute the energy cost of the sys-
tem for each configuration, we used our developed en-
ergy consumption estimation model presented in Sec-
tion 4. This model is based on the OTAWA frame-
work (Cass
´
e and Rochange, 2007) to collect informa-
tion about number of accesses and on the energy con-
sumption estimation tool CACTI (Wilton and Jouppi,
1996) in order to collect information about energy
per access to each kind of memory. OTAWA (Open
Tool for Adaptative WCET Analysis) is a frame-
work of C++ classes dedicated to static analyses of
programs in machine code and to the computation
of Worst Case Execution Time (WCET). OTAWA is
freely available (under the LGPL license) and is de-
signed to support different architectures like Pow-
erPC, ARM or M68HC. In our case, we focus on
ICSOFT 2010 - 5th International Conference on Software and Data Technologies
398
Table 2: List of benchmarks.
Benchmark Suite Description
Sha MiBench The secure hash
algorithm that
produces a 160-
bit message digest
for a given input.
Bitcount MiBench Tests the bit
manipulation
abilities of a
processor by
counting the
number of bits
in an array
of integers.
Fir SNU-RT Finite impulse
response filter
(signal processing
algorithms) over
a 700 items
long sample.
Jfdctint SNU-RT Discrete-cosine
transformation on
8x8 pixel block.
Adpcm M
¨
alardalen Adaptive pulse
code modulation
algorithm.
Cnt M
¨
alardalen Counts non-
negative numbers
in a matrix.
Compress M
¨
alardalen Data compression
using lzw.
Djpeg Mediabenchs JPEG decoding.
Gzip Spec 2000 Compression.
Nsichneu Wcet Benchs Simulate an
extended Petri net.
Automatically
generated code
with more than
250 if-statements.
Statemate Wcet Benchs Automatically
generated code.
PowerPC architectures. In our model, we distinguish
between the two cache write policies: Write-Through
(WT) and Write-Back (WB) as explained in Section
4. Our presented Tabu Search algorithm and the BEH
strategy have been implemented with the C language
on a PC Intel Core 2 Duo, with a 2.66 GHz proces-
sor and 3 Gbytes of memory running under Mandriva
Linux 2008.
5.1 Genetic Heuristics with Both
Crossover and Mutation
In this subsection, we investigate the performances of
our Genetic Heuristics using both genetic operators:
crossover and mutation. These genetic operators are
explained in Section 3.2. After making experiments
on the standard benchmarks presented in Table 2, we
find that our Genetic Heuristics achieve the same en-
ergy savings as BEH. This is what we were expecting,
due to the fact that they both give the optimal solution
thanks to our developed backtracking algorithm. This
is true for the standard benchmarks we use as they
contain uniform data leading to a big number of lo-
cal minima. Thus, in order to put some trouble in the
BEH strategy and see if it still gives the best solution,
we decided to modify slightly our benchmarks. Con-
cretely, our modification consists in adding one vari-
able to each benchmark. This variable is very com-
mon to all benchmarks as it performs an output (so
did not change the benchmarks features) and is big
enough to provide energy savings if it is chosen for an
SPM allocation. We refer to a modified benchmark as
benchmarkCE.
In these experiments, we generate 30 different ex-
ecutions for each of our Genetic Heuristics as the so-
lution given differs from an execution to another. Ge-
netic 1 represents the results obtained for P
m
= 0.1,
P
c
= 0.5 and for a single point crossover. Genetic 2
represents the results obtained for P
m
= 0.1, P
c
= 0.5
and for a two points crossover. When Genetic (1,2)
refers to the average results obtained on 30 executions
of Genetic 1 and 30 executions of Genetic 2. We mix
them that way, as the results obtained with Genetic 1
are equal to those obtained with Genetic 2.
Figure 2 presents the results obtained when com-
paring BEH and our Genetic Heuristics on our mod-
ified benchmarks assuming the write-back cache pol-
icy. In the following, as the shapes of curves obtained
when comparing BEH and Genetic Heuristics on the
modified benchmarks assuming the Write-Through
cache policy (WT) or the Write-Back cache policy
(WB) are slightly the same, only the results obtained
with the write-back cache policy are plotted. One can
show that E
W T mode
6= E
W Bmode
.
As we can see from this figure, Genetic (1,2)
achieves better performances than BEH on energy
savings on our benchmarks. In fact, these results
show that Genetic (1,2) consumes from 78.18%
(StatemateCE) up to 98.92% (ShaCE) less energy
than BEH in the WT mode on one hand. On the
other hand, Genetic (1,2) consumes from 76.23%
(StatemateCE) up to 98.92% (ShaCE) less energy
than BEH in the WB mode.
GENETIC HEURISTICS FOR REDUCING MEMORY ENERGY CONSUMPTION IN EMBEDDED SYSTEMS
399
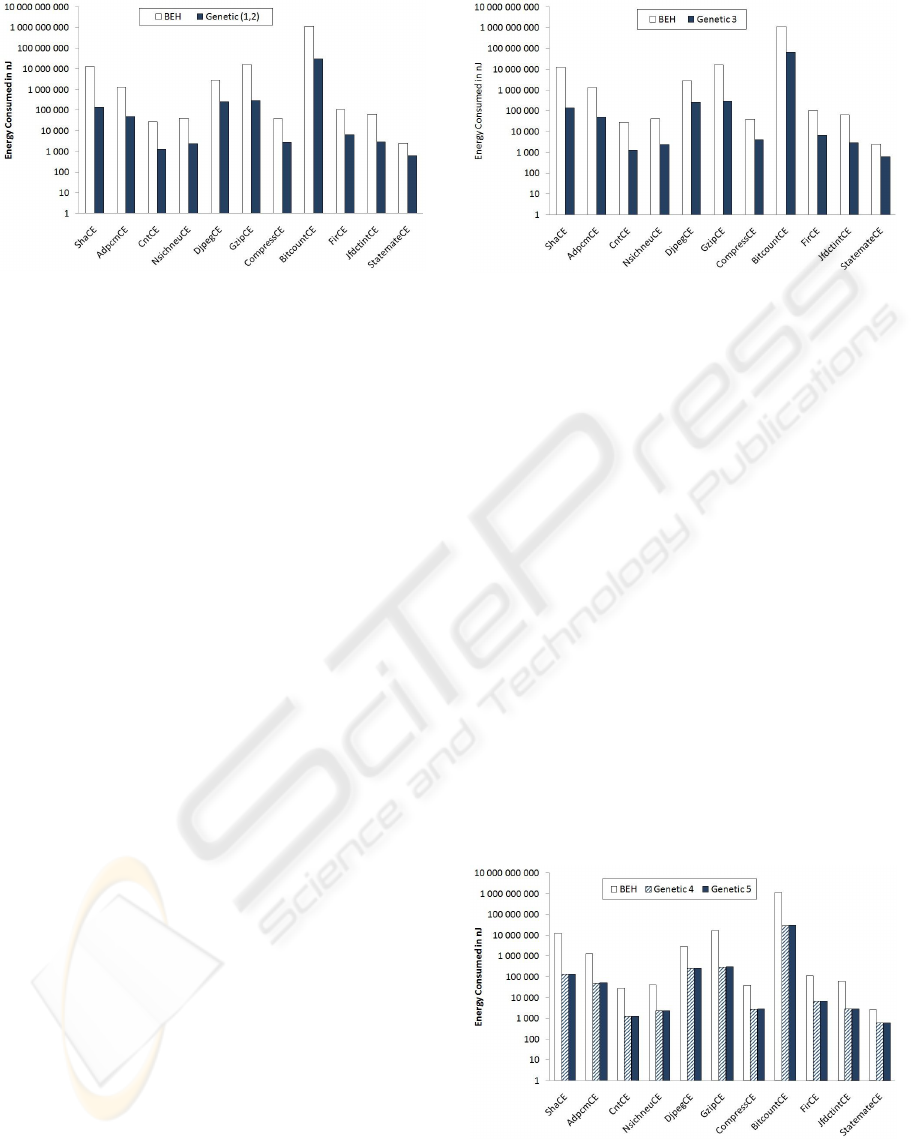
Figure 2: Energy consumed by modified benchmarks with
WB mode.
For BEH, although we used the modified bench-
marks, we still obtain the same energy savings as with
the standard benchmarks. The BEH strategy did not
give the optimal solution anymore as one could expect
as proven by our developed backtracking algorithm,
but Genetic (1,2) gives it. This is normal due to the
fact that BEH is a sort of access number/size of data as
we explain in Section 2. The variable we add in each
benchmark has a given access number/size (this ratio
depends on the data profiling of each benchmark) so
that this variable is not a priority in the sorting made
by the BEH method. This is done on purpose so that
when it will be the turn of this variable to be treated
by BEH, the remaining space in the SPM will not be
enough to take this variable and hence it will be allo-
cated in main memory. Whereas, an optimal solution
would be to start by allocating this variable first into
the SPM. In contrast, our Genetic Heuristics are ro-
bust enough to overcome this problem and find the
optimal solution as it can be noticed.
5.2 Genetic Heuristics with either
Crossover or Mutation
In this subsection, we look if removing mutation or
crossover operator has a real impact on the perfor-
mances of our Genetic Heuristics. Curious to know
more, we decided to make some additional experi-
ments. First, we start by omitting the crossover op-
eration. In these experiments, we generate 30 differ-
ent executions for our Genetic Heuristic as the solu-
tion given differs from an execution to another. These
results are average results obtained on 30 executions
of Genetic 3. Where: Genetic 3 represents the re-
sults obtained for P
m
= 0.5. Figure 3 presents the re-
sults obtained when comparing our Genetic Heuris-
tic to BEH on our modified benchmarks assuming the
write-back cache policy and without crossover. Re-
minding that E
W T mode
6= E
W Bmode
.
Figure 3: Energy consumed by modified benchmarks with
WB mode without crossover.
As we can see from this figure, Genetic 3 achieves
better performances than BEH on energy savings on
our benchmarks. In fact, these results show that Ge-
netic 3 consumes from 78.18% (StatemateCE) up to
98.92% (ShaCE) less energy than BEH in the WT
mode on one hand without crossover. On the other
hand, Genetic 3 consumes from 76.23% (Statem-
ateCE) up to 98.92% (ShaCE) less energy than BEH
in the WB mode without crossover.
Then, we continue by omitting the mutation oper-
ation. In these experiments, we generate 30 different
executions for each of our Genetic Heuristics as the
solution given differs from an execution to another.
Genetic 4 represents the results obtained for a single
point crossover. Genetic 5 represents the results ob-
tained for a two points crossover. These results are
average results obtained on 30 executions of Genetic
4 and 30 executions of Genetic 5. Figure 4 shows the
results obtained when comparing our Genetic Heuris-
tics to BEH on our modified benchmarks assuming
the write-back cache policy and without mutation.
Reminding that E
W T mode
6= E
W Bmode
.
Figure 4: Energy consumed by modified benchmarks with
WB mode without mutation.
As we can see from Figure 4, both Genetic 4 and
Genetic 5 achieve better performances than BEH on
ICSOFT 2010 - 5th International Conference on Software and Data Technologies
400

energy savings on our benchmarks. In fact, these re-
sults show that both Genetic 4 and Genetic 5 consume
from 78.18% (StatemateCE) up to 98.92% (ShaCE)
less energy than BEH in the WT mode on one hand
without mutation. On the other hand, both Genetic 4
and Genetic 5 consume from 76.23% (StatemateCE)
up to 98.92% (ShaCE) less energy than BEH in the
WB mode without mutation.
In some cases, it is not necessary to apply both
genetic operators (crossover and mutation) to achieve
good results. Thus, omitting one of the two genetic
operators still allows GAs to converge. In fact, we can
see that our Genetic Heuristics outperforms BEH on
the modified benchmarks. Regardless if we are using
either crossover or mutation operator or both of them,
we achieve the same energy savings on our modified
benchmarks.
6 CONCLUDING REMARKS
AND FURTHER RESEARCH
ASPECTS
In this paper, we have proposed a general energy con-
sumption estimation model able to be adapted to dif-
ferent memory architecture configurations. We also
have proposed new Genetic Heuristics for reducing
memory energy consumption in embedded systems
which are more efficient than the best known existing
method (BEH). In fact, our Genetic Heuristics man-
age to consume nearly from 76% up to 98% less mem-
ory energy than BEH in different memory configura-
tions. In addition our Genetic Heuristics are easy to
implement and do not require list sorting (contrary to
BEH). Comparisons of execution times of BEH and
Genetic Heuristics will be included in the full ver-
sion of this paper. In future work, we plan to ex-
plore hybrid heuristics and other evolutionary heuris-
tics (Markov Decision Processes, Simulated Anneal-
ing, ANT method, Particle Swarm technique, etc.) for
solving the problem of reducing memory energy con-
sumption.
ACKNOWLEDGEMENTS
The authors are grateful to anonymous referees for
their comments and suggestions.
This work is financed by the french national re-
search agency (ANR) in the Future Architectures pro-
gram.
REFERENCES
Absar, J. and Catthoor, F. (2006). Analysis of scratch-pad
and data-cache performance using statistical methods.
In ASP-DAC, pages 820–825.
Avissar, O., Barua, R., and Stewart, D. (2002). An opti-
mal memory allocation scheme for scratch-pad-based
embedded systems. Transaction. on Embedded Com-
puting Systems., 1(1):6–26.
Banakar, R., Steinke, S., Lee, B., Balakrishnan, M., and
Marwedel, P. (2002). Scratchpad memory: design al-
ternative for cache on-chip memory in embedded sys-
tems. In CODES, pages 73–78, New York, NY, USA.
ACM Press.
Ben Fradj, H., Ouardighi, A. E., Belleudy, C., and Auguin,
M. (2005). Energy aware memory architecture con-
figuration. In MEDEA ’04: Proceedings of the 2004
workshop on MEmory performance, volume 33, pages
3–9. ACM.
Benini, L. and Micheli, G. D. (2000). System-level power
optimization: techniques and tools. IEEE Design and
Test, 17(2):74–85.
Cass
´
e, H. and Rochange, C. (2007). OTAWA, Open
Tool for Adaptative WCET Analysis. In De-
sign, Automation and Test in Europe (Poster ses-
sion ”University Booth”) (DATE), Nice, 17/04/07-
19/04/07, page (electronic medium), http://www.date-
conference.com/. DATE. Poster session.
Graybill, R. and Melhem, R. (2002). Power aware com-
puting. Kluwer Academic Publishers, Norwell, MA,
USA.
Guthaus, M. R., Ringenberg, J. S., Ernst, D., Austin, T. M.,
Mudge, T., and Brown, R. B. (2001). Mibench: A
free, commercially representative embedded bench-
mark suite. In WWC ’01: Proceedings of the Workload
Characterization, 2001. WWC-4. 2001 IEEE Interna-
tional Workshop, pages 3–14, Washington, DC, USA.
IEEE Computer Society.
H. Kellerer, U. P. and Pisinger, D. (2004). Knapsack Prob-
lems. Springer, Berlin, Germany.
Idrissi Aouad, M., Schott, R., and Zendra, O. (2010). A
Tabu Search Heuristic for Scratch-Pad Memory Man-
agement. In ICSET’2010: Proceedings of Interna-
tional Conference on Software Engineering and Tech-
nology. To appear, in press.
Idrissi Aouad, M. and Zendra, O. (2007). A Survey
of Scratch-Pad Memory Management Techniques for
low-power and -energy. In 2nd ECOOP Work-
shop on Implementation, Compilation, Optimization
of Object-Oriented Languages, Programs and Sys-
tems (ICOOOLPS’2007).
ITRS (2007). System drivers. http://www.itrs.net/Links/
2007ITRS/2007 Chapters/2007 SystemDrivers.pdf.
Panda, P. R., Dutt, N., and Nicolau, A. (1997). Efficient
utilization of scratch-pad memory in embedded pro-
cessor applications. In DATE.
Sivanandam, S. N. and Deepa, S. N. (2007). Introduction
to Genetic Algorithms. Springer Publishing Company,
Incorporated.
GENETIC HEURISTICS FOR REDUCING MEMORY ENERGY CONSUMPTION IN EMBEDDED SYSTEMS
401

Sj
¨
odin, J., Fr
¨
oderberg, B., and Lindgren, T. (1998). Allo-
cation of global data objects in on-chip ram. In Work-
shop on Compiler and Architectural Support for Em-
bedded Computer Systems. ACM.
Steinke, S., Wehmeyer, L., Lee, B., and Marwedel, P.
(2002). Assigning program and data objects to
scratchpad for energy reduction. In DATE, page 409.
IEEE Computer Society.
Tanenbaum, A. (2005). Architecture de l’ordinateur 5e
´
edition. Pearson Education.
Truong, D. N., Bodin, F., and Seznec, A. (1998). Improving
cache behavior of dynamically allocated data struc-
tures. In International Conference on Parallel Archi-
tectures and Compilation Techniques (IEEE PACT),
pages 322–329.
Udayakumaran, S., Narahari, B., and Simha, R. (2002). Ap-
plication specific memory partitioning for low power.
In ACM COLP 2002 (Compiler and Operating Sys-
tems for Low Power). ACM Press.
Wehmeyer, L., Helmig, U., and Marwedel, P. (2004).
Compiler-optimized usage of partitioned memories.
In WMPI.
Wilton, S. and Jouppi, N. (1996). Cacti: An enhanced cache
access and cycle time model. IEEE Journal of Solid-
State Circuits.
Zheng, Y. and Kiyooka, S. (1999). Genetic algorithm appli-
cations. http://www.me.uvic.ca/∼zdong/courses/
mech620/GA App.PDF.
ICSOFT 2010 - 5th International Conference on Software and Data Technologies
402
