
APPLICATIONS OF EXPERT SYSTEM TECHNOLOGY IN THE
ATLAS TDAQ CONTROLS FRAMEWORK
Alina Corso-Radu, Raul Murillo Garcia
University of California, Department of Physics and Astronomy
4129 Frederick Reines Hall, Irvine, CA 92697-4575, U.S.A.
Andrei Kazarov
CERN, on leave from PNPI, St.Petersburg, Russian Federation
Giovanna Lehmann Miotto, Luca Magnoni, John Erik Sloper
CERN, Genève 23, Switzerland
Keywords: Controls, Expert-system, Knowledge, Verification, Testing, Recovery, ATLAS.
Abstract: The ATLAS Trigger-DAQ system is composed of O(10000) of applications running ~1500 computers
distributed over a network. To maximise the experiment run efficiency, the Trigger-DAQ control system
includes advanced verification, diagnostics and complex dynamic error recovery tools, based on an expert
system. The error recovery (ER) system is responsible for analysing and recovering from a variety of
errors, both software and hardware, without stopping the data-gathering operations. The verification
framework allows users to develop and configure tests for any component in the system with different levels
of complexity. It can be used as a standalone test facility during the general TDAQ initialization procedure,
and for diagnosing the problems which may occur at run time. A key role in both recovery and verification
frameworks is played by the rule-based expert system, which is also known as a knowledge-based system,
to analyse errors and decide on appropriate recovery actions. The system is composed of a dynamic set of
rules that describe the TDAQ system behaviour and by an inference engine that takes decisions on which
actions to perform. The system is currently used on a daily basis for the operation of the ATLAS
experiment. The paper describes the architecture and implementation of the TDAQ error-recovery system
and verification framework with emphasis on the latest developments and experience gained over the first
LHC beam runs.
1 INTRODUCTION
The paper describes the verification, diagnostics and
error-recovery components of the Controls system of
the ATLAS Trigger-DAQ (TDAQ) system. The
ATLAS is one of the experiments built to study the
proton-proton collisions delivered by the Large
Hadron Collider (LHC) at CERN.
The main aim of verification, diagnostics and
error-recovery components, that are all based on the
same rule based expert system technology, is to
maximize data taking efficiency by helping the
operator to control and diagnose the TDAQ
smoothly, through the use of the expertise provided
by the system developers.
First, the overview of the use of the expert
system technology in the scope of TDAQ Controls
system is given, including motivations, architecture
overview and some details of implementation. Then
some components are described in more detail,
focusing on their recent developments and use in
real experiment environment during first data-taking
periods of LHC machine.
512
Corso-Radu A., Garcia R., Kazarov A., Lehmann Miotto G., Magnoni L. and Sloper J. (2010).
APPLICATIONS OF EXPERT SYSTEM TECHNOLOGY IN THE ATLAS TDAQ CONTROLS FRAMEWORK.
In Proceedings of the 5th International Conference on Software and Data Technologies, pages 512-516
DOI: 10.5220/0003008605120516
Copyright
c
SciTePress
2 EXPERT SYSTEM IN TDAQ
CONTROLS FRAMEWORK
2.1 Motivations for the Application of
Expert System in TDAQ Controls
System
Requirements
At present the TDAQ system of the ATLAS
experiment (Atlas, 2008) is a very complex
distributed computing system, composed of
O(10000) of applications running on more than 1500
computers distributed over a network (Atlas, 2003).
The system is scheduled to increase further to ~ 50
thousand applications on 3000 computers to sustain
the foreseen event rates at the nominal luminosity of
the LHC.
The TDAQ Controls system (Lehmann, 2009)
has to guarantee the smooth and synchronous
operations of all TDAQ components and has to
provide the means to minimize the downtime of the
system caused by runtime failures, which are
inevitable for a system of such scale and complexity.
Tests
Repository
KB
Expert
System
Operator
Online
Recovery
DVS
Test
Manager
online
error
handling
offline
verification
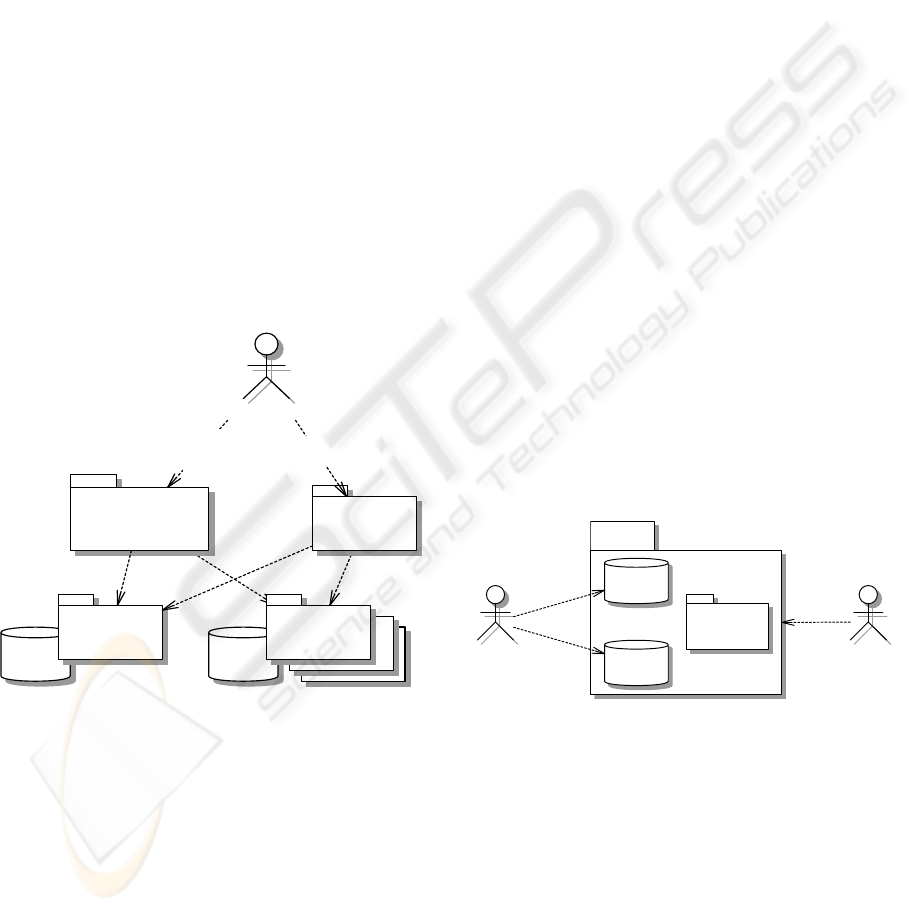
Figure 1: Use of Expert System by TDAQ Controls
components.
Architecture
To accomplish its objective, the Controls system
includes some high-level components which are
responsible for the automation of system
verification, diagnostics of failures and recovery
procedures (Figure 1): DVS (Diagnostics and
Verification System) (Kazarov, 2007) and Online
Recovery (Sloper, 2008). These components are
built on top of a common technology of a forward-
chaining Expert System (ES) framework, that allows
to program the behaviour of a system in terms of “if-
then” rules and to easily extend or modify the
knowledge base (KB).
The Online Recovery is composed of a global
server, that handles errors that have a system-wide
impact, and by local units to handle errors that can
be dealt with at a subsystem level, that is, errors that
do not have an immediate effect on the rest of the
system.
For execution of atomic tests from a Test
Repository, the Test Manager service is used, which
in turn utilizes other Controls services that are not
covered in this paper.
TDAQ Controls tools (Liko, 2004) are designed
using a framework approach, thus giving the
possibility to extend its basic functionality by filling
the provided framework with subsystem-specific
tests and rules.
Given the lifetime of the experiment which is
more then 10 years, a mean of storing and reusing
the expertise of the system developers, and also the
operational experience with the system is important.
This is achieved by storing the verification, error
diagnostics and recovery procedures (in the form of
rules in the knowledge base (KB)) and by using this
knowledge on the running system through years.
Also, the system components tests developed by
subsystem experts are stored in a Test Repository
and thus made available for verification and
diagnostics procedures performed by TDAQ
operators as schematically show on Figure 2 (more
details given in chapter 3Error! Reference source
not found..
Controls
Tests
Repository
KB
Expert
System
OperatorExpert
rules
tests
uses
Figure 2: Storing the developers expertise in TDAQ
Controls system.
2.2 CLIPS Expert System
The CLIPS expert system toolkit (CLIPS, 2010) was
chosen for the implementation of the knowledge-
based components of the Controls system. Its
principal features and capabilities are presented
below:
originally developed in NASA
available as open source
APPLICATIONS OF EXPERT SYSTEM TECHNOLOGY IN THE ATLAS TDAQ CONTROLS FRAMEWORK
513
can be used as a standalone application or as
embeddable (C-source) library, which allows
integration of ES functionality in the existing
applications
implements a number of different programming
paradigms:
“if-then” rules and a forward-chaining inference
engine
object-oriented constructs (“COOL” language)
traditional algorithmic constructs (functions, cycles
etc.)
One of the key (if not unique) features of CLIPS
is the possibility to describe the architecture of your
application using an object-oriented approach
(including classes, multiple inheritance, methods)
and to develop “generic” rules for classes of objects
which will be then applied to a particular set of
objects according to a particular configuration
without any modification of the pre-loaded rules.
This model fits very well with the TDAQ
configuration object-oriented approach and gives a
powerful tool for developing rule-based control
applications in TDAQ framework.
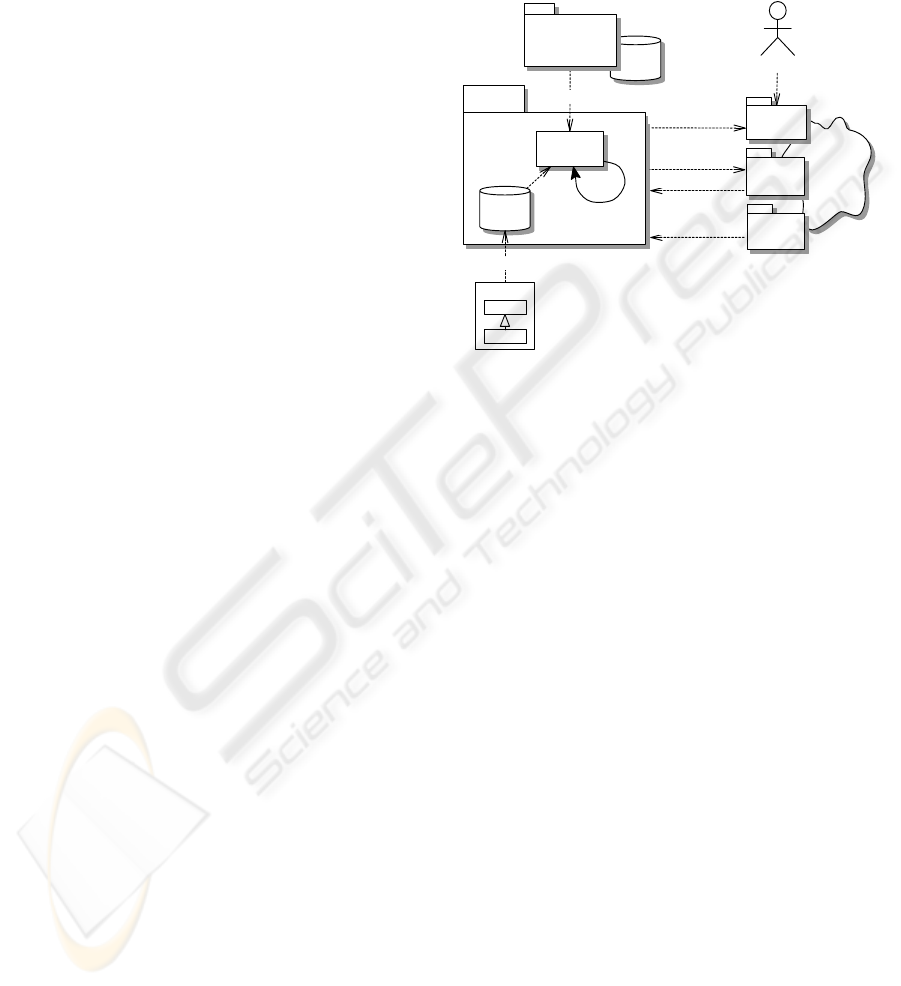
2.3 Integration of CLIPS in TDAQ
Controls Framework
Figure 3 presents shows how the expert s is
integrated and interacts with the main TDAQ
Control services.
The whole TDAQ system is fully described and
configured via the Configuration Database Service
according to a pre-defined configuration object-
oriented schema. The corresponding schema
developed in the CLIPS object language COOL is
loaded to all instances of the ES. The actual set of
objects for a particular configuration is loaded into
the ES as a class hierarchy representing proxies of
the applications and the hardware in the system.
These objects, together with information gathered
from the Monitoring service and test results can then
be used in the ES engine to match the loaded rules.
The CLIPS inference engine adopts a forward
chaining approach: the agenda is how CLIPS keeps
track of which rules are to be executed next run, and
a rule is added to the agenda when all its conditions,
given the status of objects in the systems, are
satisfied.
CLIPS parses the knowledge base at run time.
This allows to easily customize the behaviour of
recovery procedures supplying different set of rules
as arguments to the recovery applications. In a
complex and dynamic framework such as the TDAQ
system it is very difficult to detect a priori all the
different errors that might occur and what
appropriate actions should be taken. It is therefore
very important that the expert system can be easily
changed and customized as more data is gathered
and a better understanding of the system is gained.
OO schema
ExpertSystem
Agenda
KB
rules
inference
Operator
objects
classes
CDB
Configuration
Service
TDAQ
System
errors,
messages
test results
test requests
Testing
recovery actions
Controls
Monitoring
Figure 3: Integration of Expert System in Controls
framework.
3 DIAGNOSTICS AND
VERIFICATION SYSTEM (DVS)
DVS is a framework used to assess the correct
functionality of the system, to detect and diagnose
eventual problems. DVS allows the configuration of
one or several tests for any component in the system
by means of a configuration database. The system
and the testing results can be viewed in a tree like
structure using a user friendly graphical user
interface.
3.1 Tests Configuration and Access
Library
Having a possibility to examine and verify the
functionality of any component in the system is
essential for the diagnostic, i.e. for understanding the
causes of a problem and for identifying the faulty
components – either during the error recovery
procedures on the running system or in pre-
initialization phase.
A test is a binary running on a particular host in a
system. It verifies a particular functionality of a
TDAQ component and returns a single result value:
PASSED, FAILED, UNRESOLVED, TIMEOUT
and some text output. For a single component a
ICSOFT 2010 - 5th International Conference on Software and Data Technologies
514
number of tests can be associated which can be
organized in sequences, executed synchronously or
asynchronously. Tests and their relationships are
fully described in the configuration database as a
part of a particular TDAQ configuration. The
following attributes are available for test description:
parameters, host, dependencies, time-outs, scope,
complexity and mask. Any test can be associated
either to a particular object in the configuration
database or to all objects of a particular type. In the
latter case the test's parameters and host can be
parametrized by attribute values of the concrete
objects when the test is launched.
In the spirit of the TDAQ Control services, the
Tests Configuration schema and data access library
allows ATLAS subsystem experts to define more
advanced tests for detector-specific h/w and s/w
components and thus to make the verification
functionality available to other Control services, like
Run Control and DVS.
3.2 DVS Core
DVS extends the functionality of the Test Manager
by presenting a particular TDAQ configuration in a
form of testable tree-like structure, allowing to
automate testing and diagnostics of problems at
different levels of the configuration. Its core
components are the Test Repository database
describing all tests and the expert system filled with
some knowledge by an expert. The functionality is
available to end-users via C++ API and via a user-
friendly GUI.
DVS
Expert
Operator
Test
Repository
Knowledge
Base
Expert System
engine
DVS GUI
C++ API
DVS
console
Figure 4: Architecture of DVS.
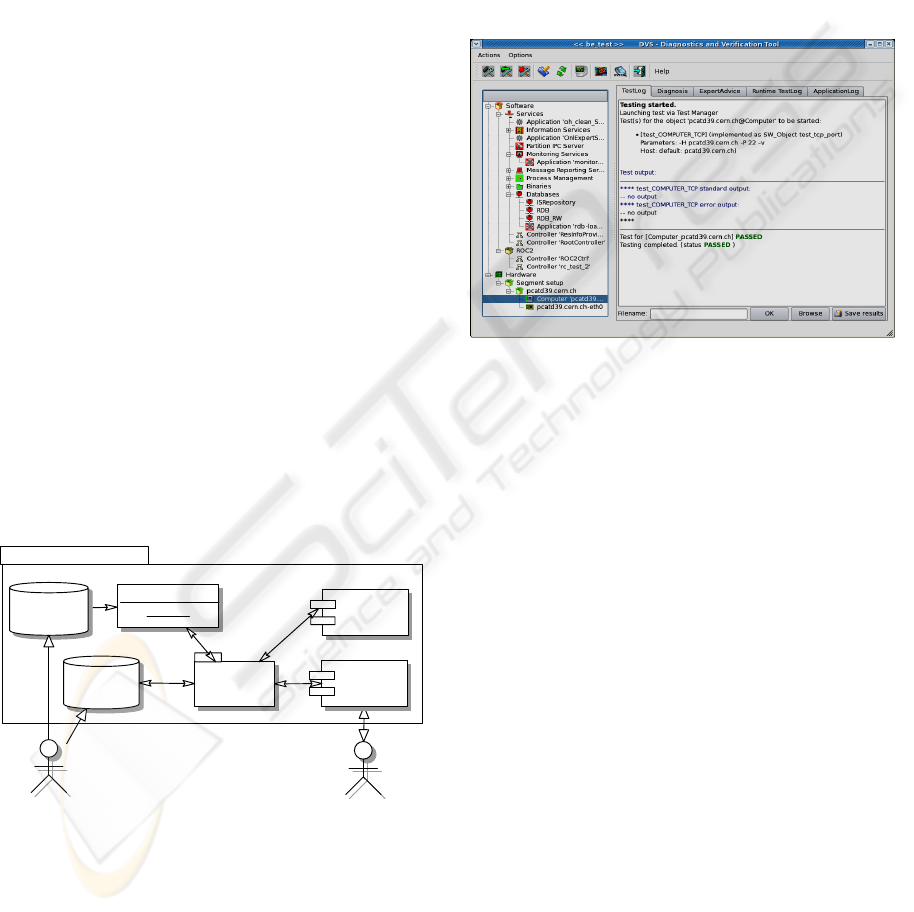
3.3 DVS Graphical User Interface
A new version of the DVS graphical user interface
has been developed recently. The previous version
based on Java was using JNI (Java Native Interface)
for the communication with the DVS core library.
This choice had proved to be not scalable enough
and not easy to debug and maintain. A Qt4 based
implementation replaced the previous GUI.
Figure 5 shows the main panel of the DVS GUI.
In its left side the tree of testable components is
displayed. The user can select a single component or
a group in the tree and run all defined tests by
clicking a single button. As tests finish, the
components icons change colour reflecting the
result. On the right hand side the test results,
diagnosis and recovery advice are presented.
Figure 5: DVS Graphical User Interface – main panel.
Other features were implemented following the
constant user feedback received: log file browser for
accessing log files produced by the TDAQ
applications running in a distributed environment,
test scope to prevent destructive tests to be executed
during data-taking sessions, test runtime output for
long-running tests.
4 RECOVERY SCENARIOS
IMPLEMENTED WITH
ONLINE RECOVERY AND RUN
CONTROL FRAMEWORK
This section introduces a simple recovery scenarios.
The rule in Fig. 6 describes a general recovery
mechanism in case an application has died. The left
hand side (LHS) of the rule contains the conditions
to identify the error situation, the right hand side
(RHS) lists the actions to be taken.
In the TDAQ framework applications are
arranged in a tree structure, with a controller
responsible for a segment, a subset of the whole
system. Following this recovery rule, when an
application that satisfies the conditions described in
the LHS the expert system takes care of notifying
APPLICATIONS OF EXPERT SYSTEM TECHNOLOGY IN THE ATLAS TDAQ CONTROLS FRAMEWORK
515

the associated controller to ignore the application
from now on.
Figure 6: Sample recovery rule.
This approach can be applied to more advanced
scenarios. In the ATLAS TDAQ framework, the
expert system server holds the main responsibility of
dealing with detector frontend failures. There is an
automatic recovery procedure which allows for
Read-Out Drivers (RODs) that are permanently busy
or otherwise faulty to be recovered without stopping
the run. The expert system drives the recovery
operations, detecting the error conditions and
holding the data acquisition triggers for the time
needed to disable the failing component and to
restore safe data taking operations.
5 CONCLUSIONS
We described the architecture and the
implementation of the diagnostics and verification
tool and the error-recovery mechanism, two
components of the ATLAS Trigger-DAQ suite. The
aim of these components is to increase as maximum
as possible the experiment data-taking efficiency, by
helping the operator to spot problems easily without
the need to stop the data-taking process. The
common feature of the two components is the usage
of the rule-based expert system technology that
allows to program the behaviour of a system in
terms of “if-then” rules and to easily extend or
modify the knowledge base. We describe the system
improvements after the experience gained during the
first LHC data-taking periods.
REFERENCES
ATLAS Collaboration, 2008. The ATLAS Experiment at
the CERN Large Hadron Collider. Journal of
Instrumentation, 3 (2008) S08003.
ATLAS Collaboration, 2003. ATLAS High-Level Trigger,
Data Acquisition and Controls Technical Design
Report. CERN Technical Design Report. Available at:
http://cdsweb.cern.ch/record/616089. [Accessed 30
March 2010].
CLIPS, 2010. CLIPS: A Tool for Building Expert Systems.
Available at : http://www.ghg.net/clips/CLIPS.html.
[Accessed 30 March 2010].
Kazarov, A., Corso-Radu, A., Lehmann Miotto, G.,
Sloper, J. E. & Ryabov, Y., 2007. A rule-based
verification and control framework in ATLAS
Trigger-DAQ. IEEE Transaction on Nuclear Science.
54 (2007) 604-608.
Lehmann, G. et al., 2009. Configuration and Control of the
ATLAS Trigger and Data Acquisition. Proceedings of
The 1st International Conference On Technology And
Instrumentation In Particle Physics. Tsukuba, Ibaraki,
Japan, 12-17 Mar 2009.
Liko, D. et al., 2004. Control in the ATLAS TDAQ
System. Computing in High Energy Physics and
Nuclear Physics. Interlaken, Switzerland, 27 Sep - 1
Oct 2004.
Sloper, J. E., Lehmann Miotto, G. & Hines, E., 2008.
Dynamic Error Recovery in the ATLAS TDAQ
System. IEEE Transaction on Nuclear Science. 55
(2008) 405-410.
ICSOFT 2010 - 5th International Conference on Software and Data Technologies
516
