
p-MDAG
A Parallel MDAG Approach
Joubert de Castro Lima
1
and Celso Massaki Hirata
2
1
Federal University of Ouro Preto (UFOP), Brazil
2
Instituto Tecnológico de Aeronáutica (ITA), Brazil
Keywords: Cube Computation, Parallel Cube Computation, Data Warehous, OLAP.
Abstract: In this paper, we present a novel parallel full cube computation approach, named p-MDAG. The p-MDAG
approach is a parallel version of MDAG sequential approach. The sequential MDAG approach outperforms
the classic Star approach in dense, skewed and sparse scenarios. In general, the sequential MDAG approach
is 25-35% faster than Star, consuming, on average, 50% less memory to represent the same data cube. The
p-MDAG approach improves the runtime while keeping the low memory consumption; it uses an attribute-
based data cube decomposition strategy which combines both task and data parallelism. The p-MDAG
approach uses the dimensions attribute values to partition the data cube. It also redesigns the MDAG
sequential algorithms to run in parallel. The p-MDAG approach provides both good load balance and
similar sequential memory consumption. Its logical design can be implemented in shared-memory,
distributed-memory and hybrid architectures with minimal adaptation.
1 INTRODUCTION
The Data Warehouse (DW) and Online Analytical
Processing (OLAP) technologies perform data
generalization by summarizing huge amount of data
at varying levels of abstraction. They are based on a
multidimensional model. The multidimensional
model views the stored data as a data cube. The data
cube was introduced in (Gray, 1997). It is a
generalization of the group-by operator over all
possible combinations of dimensions with various
granularity aggregates. Each group-by, named
cuboid or view, corresponds to a set of cells,
described as tuples over the cuboid dimensions.
Since the introduction of DW and OLAP,
efficient computation of cubes has become one of
the most relevant and pervasive problems in the DW
area. The problem is of exponential complexity with
respect to the number of dimensions; therefore, the
materialization of a cube involves both a huge
number of cells and a substantial amount of time for
its generation.
One alternative for dealing with the data cube
size is to allow partial cube computation. Instead of
computing the full cube, a subset of a given set of
dimensions or a smaller range of possible values for
some of the dimensions is computed. We have
iceberg-cubes (Beyer, 1999) (Han, 2001) (Lima,
2007) (Xin, 2007), closed-cubes (Xin, 2006),
quotient-cubes (Lakshmanan, 2002) and frag-cubes
(Li, 2004) which address different solutions to
compute partial data cubes.
The second alternative for dealing with the data
cube size is to introduce parallel processing which
can increase the computational power through
multiple processors. Moreover, the parallel
processing can increase the IO bandwidth through
multiple parallel disks. There are several parallel
cube computation and query approaches in the
literature (Chen, 2004) (Chen, 2008) (Dehne, 2001)
(Dehne, 2002) (Goil, 1997) (Goil, 1998) (Goil,
1999) (Lu, 2003) (Muto, 1999).
In this paper, we present a novel parallel
approach to compute data cubes named Parallel
Multidimensional Direct Acyclic Graph Approach
(p-MDAG). The p-MDAG approach combines both
data and task parallelism. It is designed to be
executed in distributed-memory, shared-memory or
hybrid architectures. Low cost hybrid architecture
can be represented by a cluster of multiprocessor
PCs interconnected by a network or switch.
The p-MDAG approach uses the dimensions
attribute values to partition the data cube. It also
redesigns the two phase (base and aggregation
322
de Castro Lima J. and Hirata C. (2010).
p-MDAG - A Parallel MDAG Approach.
In Proceedings of the 12th International Conference on Enterprise Information Systems - Databases and Information Systems Integration, pages
322-331
DOI: 10.5220/0003017703220331
Copyright
c
SciTePress
phases) MDAG sequential algorithms to run in
parallel.
The MDAG approach, proposed in (Lima, 2007),
outperforms the Star approach, proposed in (Xin,
2007), in dense, skewed and sparse scenarios,
computing full or iceberg cubes. The Star approach
outperforms some classical cube approaches, as
presented in (Zhao, 1997), (Beyer, 1999) and (Han,
2001), in the same scenarios. In general, the MDAG
approach is 25-35% faster than Star, using, on
average, 50% less memory to represent the same
data cube.
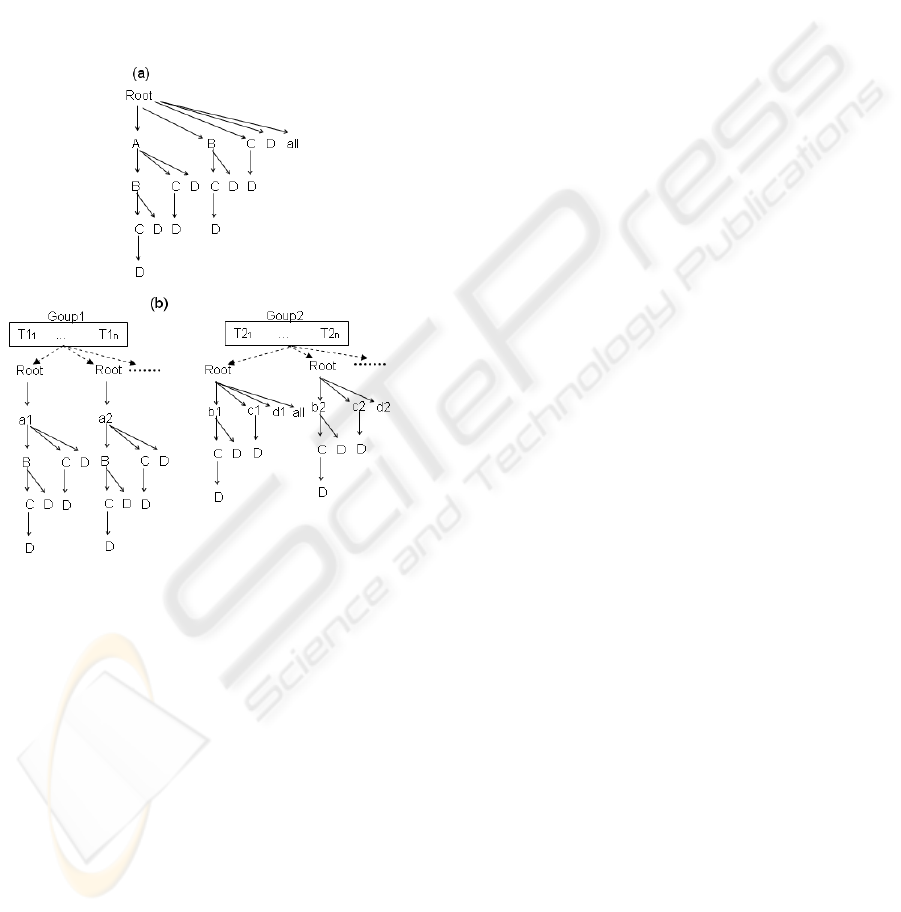
Figure 1: p-MDAG decomposition strategy.
Figure 1 illustrates the basis of p-MDAG data
cube decomposition strategy. In Figure 1, we
illustrate a data cube composed by four dimensions
A, B, C and D with cardinalities C
A
, C
B
, C
C
and C
D
,
respectively. We consider A={a
1
; a
2
; . . .}, B={b
1
;
b
2
; . . .}, C={c
1
; c
2
; . . .} and D={ d
1
; d
2
; . . .}.
In Figure 1-a, we have a unique lattice of
cuboids, representing the cuboids A, B, C, D, AB,
AC, AD, BC, BD, CD, …, ABCD, all(*). We use a
prefixed data structure to represent such cuboids. A
path from root to a node represents a cuboid.
The challenge is to find a set of disjoint cube
partitions with similar size and a set of parallelizable
tasks during the cube computation. In Figure 1-b, we
first divide the lattice into partitions rooted by A
attribute values. These partitions form the cuboids
ABCD, ABC, AB and so on. The base cuboid
ABCD is created from the base relation and the
remaining aggregated cuboids are created from the
base cuboid, in a top-down fashion. All the cuboids
rooted by A attribute values are created by the thread
group 1.
In Figure 1, T1
1
, … T1
n
, T2
1
, … T2
n
represent
the threads. The number of threads in a group
depends on the number of processors in a machine.
The number of partitions that each thread handles
depends on the frequency of the attribute values of
the dimensions. If the data is skewed, we can adopt
sampling techniques to identify the approximate
frequencies without full base relation scans.
After the execution of thread group 1, the thread
group 2 starts its execution. The number of threads
on both groups is not necessarily identical. We use
identical thread group size to facilitate the
explanation.
The second thread group creates the remaining
cuboids, i.e., cuboids not started with dimension A
(BCD, BC, B and so on). The threads in the second
group are associated to the remaining dimensions
attribute values. They read the partitions generated
by the thread group 1 and update their own cube
partitions. After the second thread group execution,
the full cube is complete.
In summary, the p-MDAG approach minimizes
regions of the algorithms that must be run
sequentially. These regions are limited to the thread
groups configuration, start-up and join. No
synchronization is required to generate the
aggregated cuboids. The p-MDAG approach
achieves a good load balance, since each partition
have similar size. Finally, p-MDAG and MDAG
have similar memory consumption. The unique
redundancy in p-MDAG approach is the internal
node. Each cube partition has its shared internal
nodes to avoid synchronizations, but the number of
internal nodes is insignificant when compared with
the number of non internal nodes.
We run the p-MDAG approach using base
relations with different cardinalities, dimensions
tuples and skew. In general, the p-MDAG approach
scales very well in a shared-memory multiprocessor
machine, where a linear speedup is not reachable to
a memory-bound application, since the intensive
memory access increases the bus system contention.
Most bus-based systems do not scale well because of
contention on the bus (Dongarra, 2003).
The remaining of the paper is organized as
follows: Section 2 the sequential MDAG approach is
explained. In Section 3, the p-MDAG approach is
explained in details, the algorithms are described
and the performance results are presented.
Discussion on the potential extensions and
p-MDAG - A Parallel MDAG Approach
323
limitations of the p-MDAG approach is described in
Section 4. We conclude our work in Section 5.
2 MDAG APPROACH
The sequential MDAG approach, proposed in (Lima,
2007), computes a full cube in two phases: first, it
scans the base relation to generate the base cuboid;
second, it scans the base cuboid to generate the
aggregated cuboids. The aggregated cuboids are
generated in a top-down fashion.
The MDAG approach uses internal nodes in a
data cube representation to reduce the number of
redundant nodes. The presence of internal nodes also
reduces both the number of branches and the height
of the MDAG cube representation, as Figure 2
illustrates. During the base and aggregated cuboids
construction, the MDAG guarantees no internal node
redundancies in the lattice.
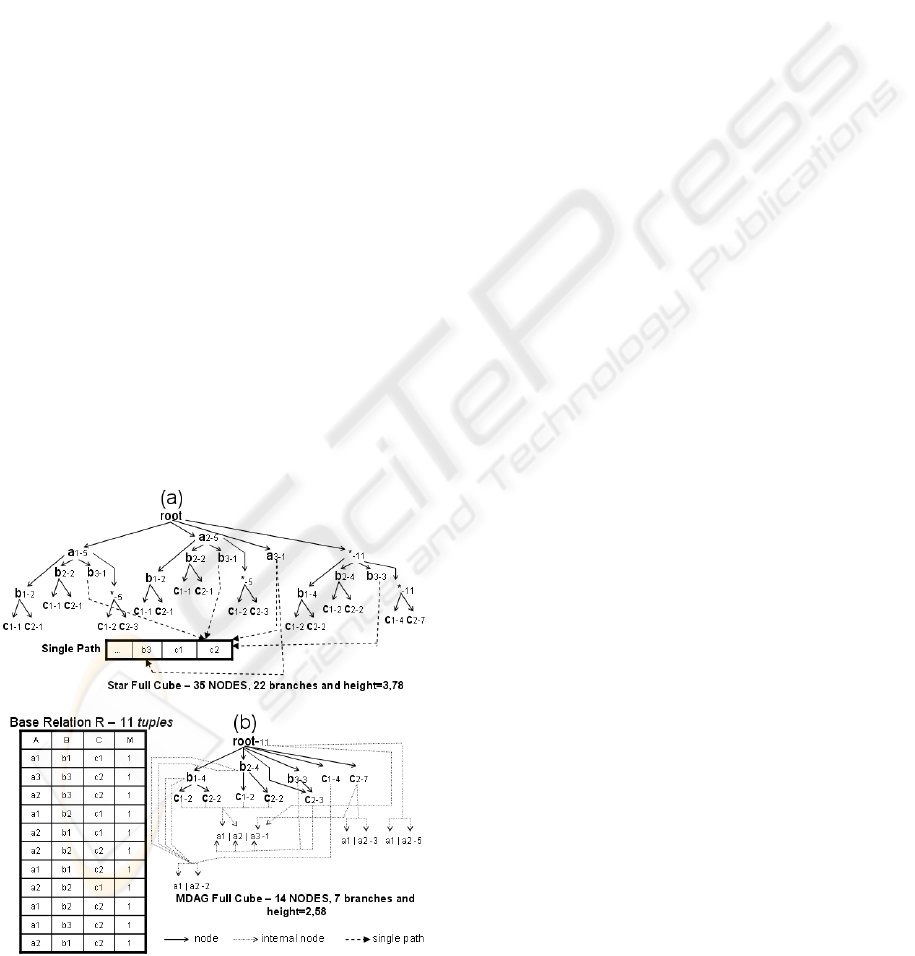
Figure 2 illustrates Star and MDAG full cubes,
computed from R. R is a base relation with 11
tuples, one measure and three dimensions (ABC)
with cardinalities 3, 3 and 2, respectively.
The MDAG approach uses Direct Acyclic
Graphs (DAGs) to represent individual cuboids. In
Figure 2-b, a path from root to a leaf node or a path
from root to leaf node plus an internal node
represents a MDAG cube cell. In Figure 2-a, a path
from root to a leaf node represents a Star cube cell.
Figure 2: Star and MDAG full cubes.
During the aggregated cuboids construction,
there are several single paths in the lattice. Consider
a single path a branch of a data structure where no
forks exist. In Star approach, the first node of the
single path points to some attribute values and the
remaining single path nodes are removed, as Figure
2-a illustrates. In MDAG, a similar idea is proposed.
In Figure 2-b, path b
3
c
2
is a single path and c
2
is
used as both base and aggregated node. Both Star
and MDAG approaches avoid the creation of new
nodes to represent the aggregations derived from
single paths.
In general, MDAG is 25-35% faster than Star,
consuming, on average, 50% less memory to
represent the same data cube.
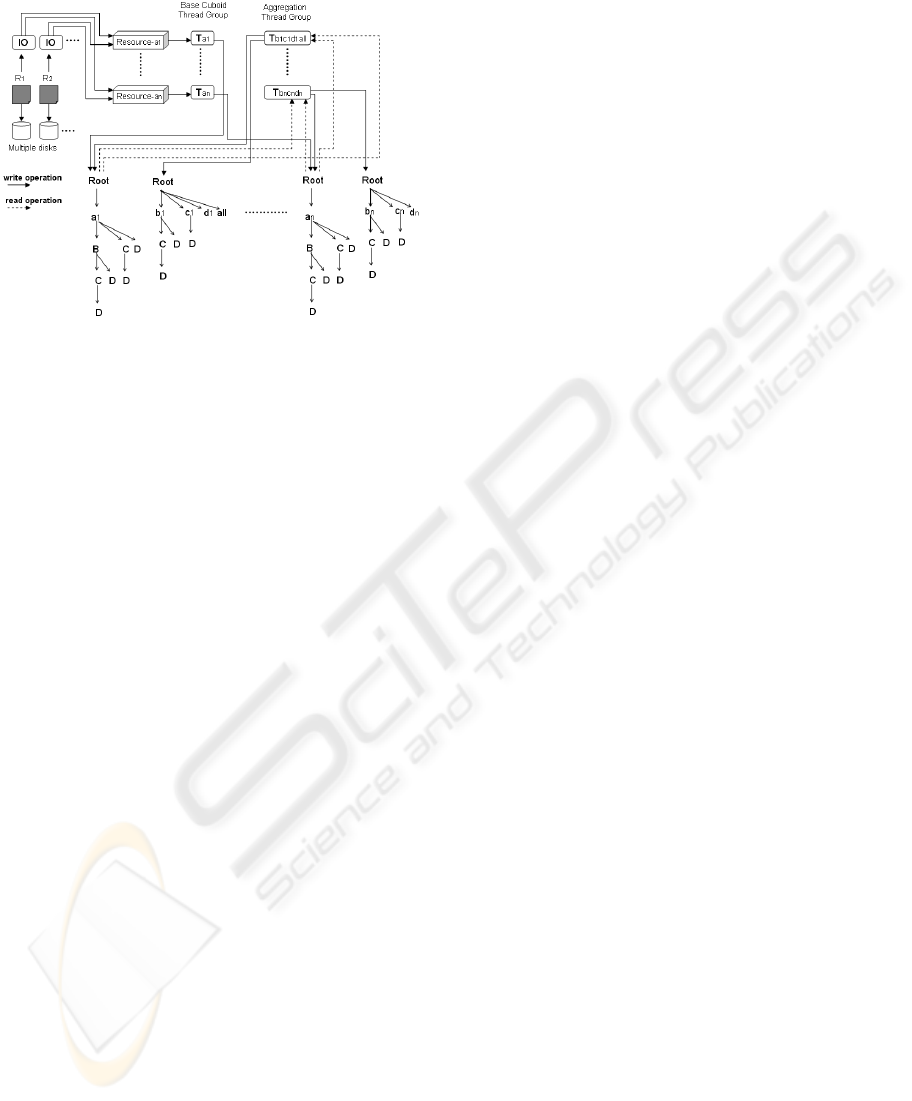
3 p-MDAG APPROACH
The p-MDAG approach adopts the
producer/consumer model to minimize
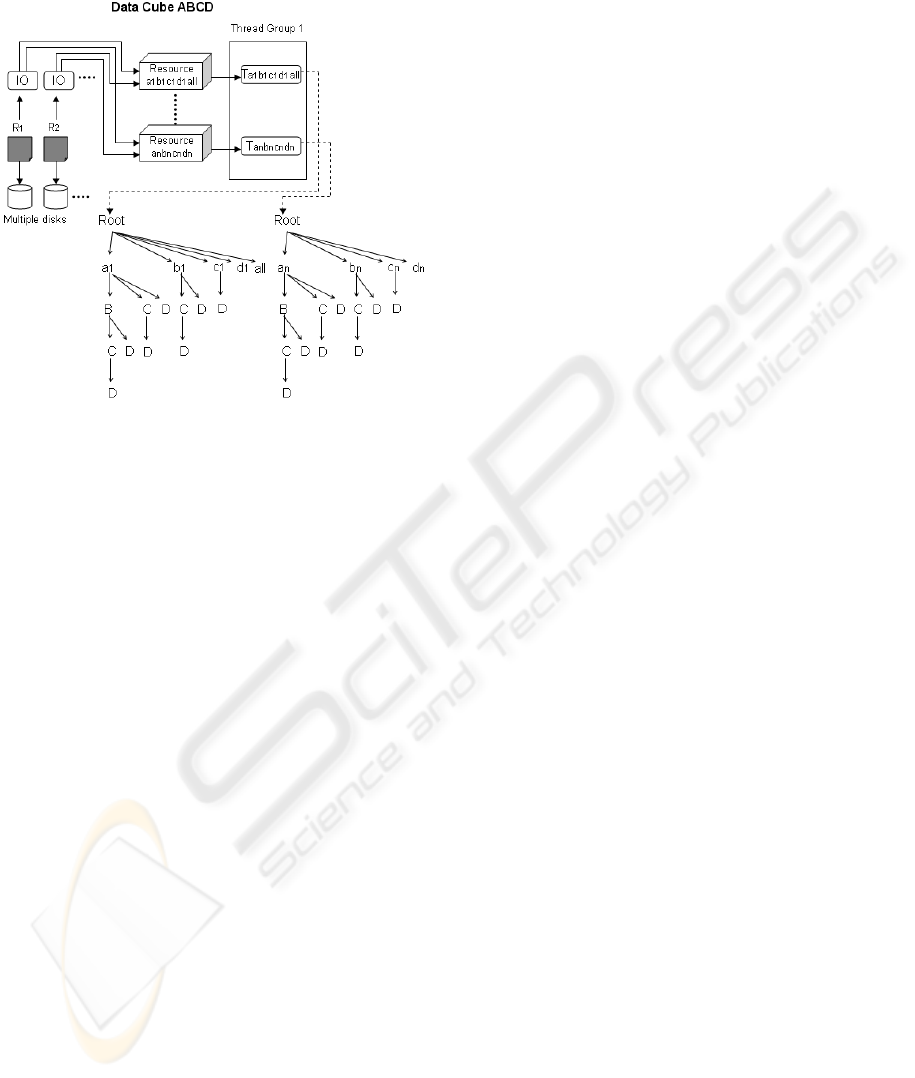
synchronizations. Figure 3 illustrates the logical
design of p-MDAG approach. A 4D data cube
ABCD is used to exemplify our approach. Each
dimension has equal cardinality n to facilitate the
explanation.
The original base relation R can be partitioned
according to the number of disks and processors. R
can be partitioned into R
1
, R
2
, …, R
n
,
where
n
RRRR ...
21
. Each R
1
, R
2
, …, R
n
, base
relation represents a subset of R without any
arrangement, i.e., the original R tuples order is
maintained in R
1
, R
2
, …, R
n
base relations. These
independent relations are stored into independent
disks, being read simultaneously by IO threads. Each
independent relation has its own IO thread. The IO
threads implement the producer in the
producer/consumer model. They share the resources
where the tuples are inserted. The unique
synchronization point of the entire solution is the
resource, i.e., the resource access methods putTuple
and getTuple.
The IO threads have the information where each
tuple must be inserted. The criterion for
classification is based on the first dimension
attribute values. In our example, dimension A
attribute values are selected. In the MDAG
sequential approach, one dimension (the highest
cardinality dimension) is used to produce the
internal nodes. If dimension A is selected to form
such internal nodes, the dimension B attribute values
become the criteria for classification. In general, it is
easy to adequate our logical design to a cube compu-
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
324
tation algorithm.
Figure 3: p-MDAG logical design.
Figure 3 illustrates the creation of one resource
per attribute value of dimension A. The same
criterion occurs to the number of threads in groups 1
and 2. The 1-1 relationship is used to facilitate the
explanation. The number of IO threads is
proportional to both number of disks and processors.
The number of resources and threads in group 1 and
2 are proportional to the number of processors. As
mentioned before, the number of attribute values
that each thread of each group is associated depends
on the frequency of each attribute value in the base
relation.
We use Figure 3 to simulate a complete example
execution. We use a tuple t:a
1
b
1
c
1
d
1
in our
execution. First, t must be stored in one file.
Suppose it is stored in R
1
. The IO thread associated
to R
1
loads t and decides which resource t must be
inserted. In our example, t is inserted in resource
a1
.
After t insertion, one thread of group 1 is notified,
indicating that there is a resource to be consumed.
The threads of group 1 implement the consumer of
the producer/consumer model.
In our example, thread T
a1
is notified. It inserts t
on its cube partition. After t insertion, T
a1
tries to
obtain more tuples from its resource. If there is no
tuple, the thread waits until a notification occurs.
This step continues until there is no more tuples to
be loaded from the disks. The IO threads indicate the
resources when such a condition occurs.
To complete the explanation, we consider t as the
last tuple to be inserted. After T
a1
inserts t on its
partition, it verifies that there is no more tuples to be
inserted in the resource and starts the generation of
the aggregations which begins with a
1
. In our
example, a
1
b
1
d
1
, a
1
c
1
d
1
and a
1
d
1
cells are created.
Note that, the remaining aggregated cells a
1
b
1
c
1
, a
1
b
1
and a
1
have being created during the base cuboid
construction.
After the thread group 1 execution, the thread
group 2 starts its execution. To continue the
explanation, we consider thread T
a1
the last thread
that finishes the generation of the aggregations.
After T
a1
execution, the threads T
b1c1d1all
, T
b2c2d2
, …
T
bncndn
start. The thread T
b1c1d1all
scans the cube
partitions generated previously by thread group 1,
identifying sub-structures that begin with b
1
, c
1
and
d
1
. These sub-structures are copied to a new cube
partition, maintained by T
b1c1d1all
. The all node are
updated with the measure values of nodes a
1
… a
n
during the same scan. The result is another part of a
data cube, composed by cells b
1
, c
1
, d
1
, b
1
c
1
, b
1
d
1
,
c
1
d
1
and all.
Assuming that thread T
b1c1d1all
is the last thread
that completes the generation of the remaining
aggregations, after its execution, the full data cube is
complete, as Figure 3 illustrates.
3.1 Architectures
The abstractions, such as IO thread, resource,
threads of group 1 and 2 can be configured in any
architecture. Suppose a shared-memory
multiprocessor architecture with multiple disks. In
such architecture, we instantiate IO threads
according to the number of disks and threads of
group 1 according to the total number of processors
minus the used to IO (suppose there are sufficient
processors for IO and group 1). Since the group 2
threads run after IO and group 1 threads, the number
of threads of group 2 can be equal the total number
of processors. Each thread of group 1 and 2 are
associated with different number of attribute values,
but there is no restriction to this configuration. If the
attribute values are combined according to their
frequencies, the system scales well if we consider
the hardware limitations described before.
In distributed-memory architecture each
processing node can store a part of the base relation,
one IO thread, one resource, one thread of group 1
and one of group 2. Each thread of group 1 shares a
resource with one IO thread and the group 2 threads
must scan all partitions manipulated by group 1
threads. Due to these observations, in a distributed
implementation both resources and cube partitions
manipulated by group 1 must enable remote access.
The remaining producer/consumer ideas can be used
without change.
If each processing node is a multiprocessor
machine with multiple disks, a similar shared-
memory solution can be proposed to each processing
p-MDAG - A Parallel MDAG Approach
325

node. The producer/consumer model modifications
also occur to enable remote access to some
abstractions of p-MDAG approach.
Due to the limited space in this paper, we
compute only full cubes. We run the p-MDAG
approach in a shared-memory multiprocessor
machine with multiple disks. In Section 4, we
discuss some p-MDAG extensions to both compute
iceberg cubes and run p-MDAG in distributed-
memory or hybrid architectures. In the next section,
we describe the main algorithms of p-MDAG
approach.
3.2 Algorithms
In this section, we describe some algorithms of p-
MDAG approach. The IO thread and resource
algorithms are not detailed due to they simplicity.
The first algorithm reads a flat file tuple-by-tuple,
inserting each tuple in a resource. The second
algorithm maintains a collection of tuples, enabling
to insert or remove tuples from it. Each insertion
causes a notification and if the collection of tuples is
empty the resource waits until a new insertion
occurs.
The thread group 1 algorithm is described as
follows:
Algorithm 1 Group 1
Input: A resource Ri
Output: A cube partition
Call Group1();
procedure Group1(){
var: resource Ri;
1: while(Ri has tuples or Ri is not
finished) do{
2: tuple t ← one Ri tuple;
3: measure m ← t measure;
4: traverse the partition creating
new nodes or updating nodes measure,
according to t attribute values;
5: Node l ← leaf node of the
traversal;
6: insert or update l internal node,
using t and m;}//end while
7: Node n ← root node of the partition;
8: for (Node d : n descendants)
9: call mdagAggreg(null, d);}
Lines 2-5 of procedure Group1 generate part of
the base cuboid from the tuples inserted in R
i
. One
dimension is used to form the internal nodes, so the
respective t attribute value and m measure are used
to create such an internal node (line 6). One of the
main advantages of MDAG approach is to share
internal nodes among non internal nodes. The
internal node sharing method is summarized by line
6. A detailed description of how internal nodes can
be shared is found in (Lima, 2007).
After generating part of the base cuboid, the
aggregation process starts. The aggregations must be
rooted by the attribute value(s) selected to form the
partitions. For example, in Figure 3 the aggregations
generated by thread group 1 must be rooted by a
1
in
the first partition, a
2
in the second, and so on. In
Group1 procedure (lines 7-9), we generate the
aggregations of one partition. For each descendant
of the partition root node a mdagAggreg procedure
call is made. In Figure 3, for each B attribute value a
mdagAggreg call occurs, resulting in a
1
BD, a
1
CD
and a
1
D cells of cuboids ABD, ACD and AD,
respectively. The second partition produces a second
set of cells of ABD, ACD and AD, and so on. The
mdagAggreg procedure is described in (Lima, 2007).
It is important to stress that the direct
aggregation method, proposed in (Lima, 2007), can
also be used by Group1 procedure to avoid the
creation of some aggregated nodes. The direct
aggregation method is an alternative to the single
path compression method, proposed in (Xin, 2007).
The direct aggregation method maintains the single
path nodes with no new nodes to represent their
aggregations. The presence of such single path
nodes guarantees the group 2 partitions integrity,
since a single descendant node in group 1 partition
can become a multiple descendant node in group 2
partition.
The thread group 2 algorithm is described as
follows:
Algorithm 2 Group 2
Input: Partitions of group 1
Output: A cube partition
For (partition f: partitions of group
1)
Call Group2(f root);
procedure Group2(Node n){
var map of attribute values M;
1: for (Node d: n descendants)
2: for (Node d’: d descendants)
3: if (M contains d’ attribute
value) copy d’, including d’ sub-
structure, to the current partition;}
The procedure Group2 scans all partitions
generated by group 1 and copies them to its
partition. The copy is filtered by the attribute values
contained in a map. Only sub-structures rooted by
attribute values contained in such a map are copied.
The map is generated by a main application which
executes a sampling algorithm to identify the
attribute values approximate frequencies. The
investigation of the best sampling techniques is out
of the scope of this work. In p-MDAG, we
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
326

implement a version of the simple random sampling,
proposed in (Olken, 1990).
The main application also starts the IO threads,
group 1 and 2 threads. It controls the start of thread
group 2 after the last thread of group 1 has finished.
In this section, we present the main algorithms
contained in p-MDAG approach. The algorithms
guarantee a unique point of synchronization. Only
the simple getTuple and putTuple methods of the
resource are synchronized. Moreover, the attribute-
based data cube decomposition strategy gives
flexibility to specify the number of threads
according to the hardware. In the next section, we
present the p-MDAG approach performance
analysis.
3.3 Performance Analysis
A comprehensive performance study is conducted to
check the efficiency and the scalability of the
proposed algorithms. All the algorithms are coded in
Java 64 bits (JRE 6.0 update 7). We run the
algorithms in a dual Intel Xeon E5405 with 16GB of
RAM. Each Intel Xeon E5405 is a quad-core
processor, so we have a total of 8 processors (2 GHz
each) in the machine. The 16GB of RAM is shared
among the 8 processors. There are 4 SATAII disks
(7200rpm). The system runs Windows Server 2003
R2 64 bits. All base relations can fit in the main
memory.
For the remaining of this section, D is the
number of dimensions, C the cardinality of each
dimension, T the number of tuples in a base relation,
and S the skew of the data. When S is equal to 0, the
data is uniform; as S increases, the data is more
skewed.
The first set of experiments test all abstractions,
illustrated in Figure 3, running together. We fix the
number of IO threads to two, i.e., each base relation
is divided and stored into two disks. The number of
resources varies from one to six. The number of
threads of group 1 and 2 also varies from one to six.
The number of threads on both groups is always
identical.
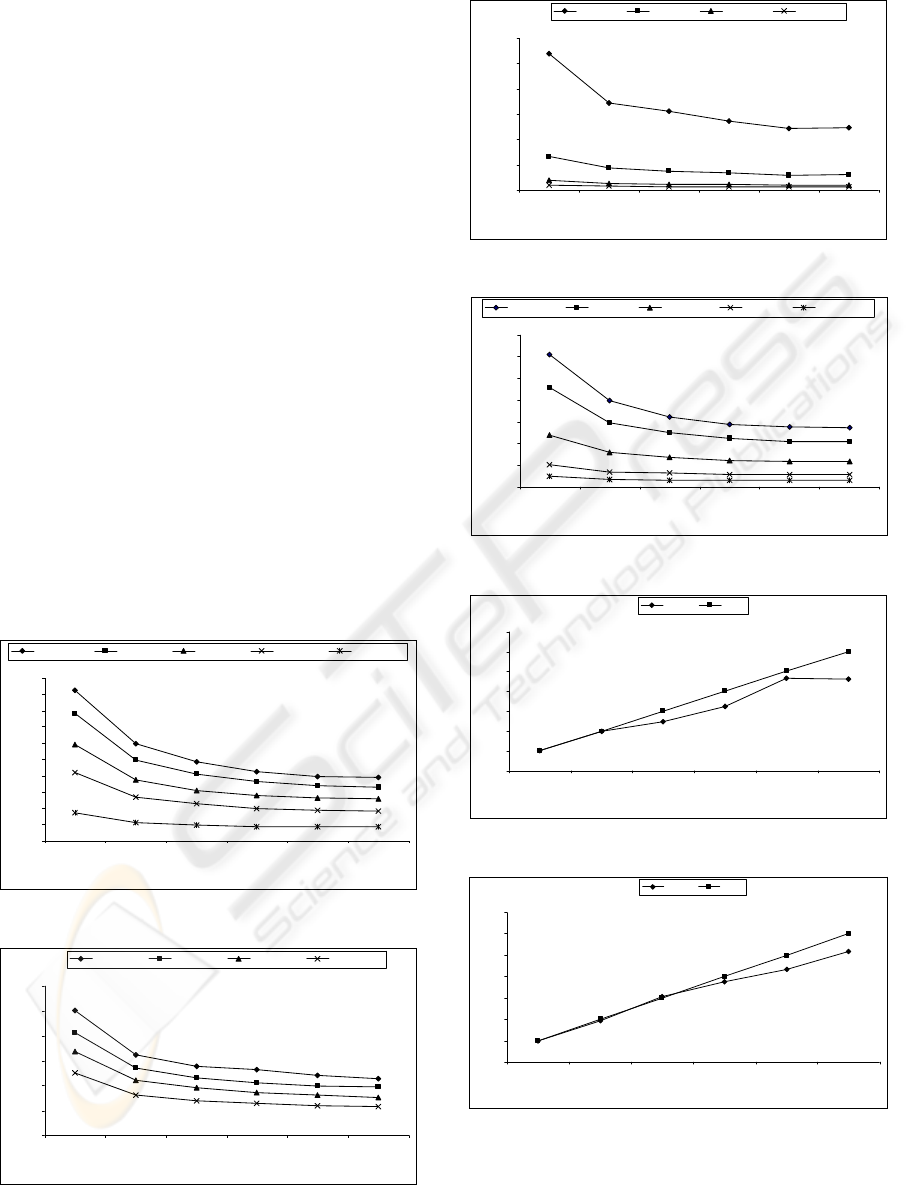
The runtimes are compared with respect to the
cardinality (Figure 4), tuple size (Figure 5),
dimension (Figure 6) and skew (Figure 7). In all
scenarios, the runtime decreases almost linear from
experiment with one thread (one thread of group 1
and one of group 2) to two threads (two threads of
group 1 and two of group 2). After two threads, the
runtime decreases slowly, almost stopping after five
threads running simultaneously.
We accomplish an experiment without the IO
threads, i.e., assuming the resources with all tuples
of the base relation. The runtime decreases, but the
curves continue similar, so due to the limited space
we omit the graphics in this paper.
This behaviour is justified by the contention on
the bus system. The cube partitions are shared
nothing, but the architecture is shared-memory. With
one thread, the cube partitions manipulated by group
1 and 2 are created/updated with no concurrence. As
the number of threads increases, the number of
simultaneous operations also increases and the bus
system becomes the bottleneck of the execution.
To prove our assumption that the bus system
becomes the bottleneck of the execution, we run
only one thread per time, collecting the worst time
of thread group 1 and 2. We consider all tuples in
their resources. We instantiate all threads to consider
the main application controls in our results. In
Figure 8, we present the result when computing a
base relation with 8 dimensions, cardinality 10 on
each dimension, skew 0 and 1M tuples. In Figure 9,
we present the result when computing a base relation
with 6 dimensions, cardinality 100 on each
dimension, skew 1.5 and 1M tuples. Due to the
similarity in the results, we omit the graphics where
we change the cardinality and number of tuples.
The speedup, illustrated in Figures 8 and 9, is
one of the key metrics for the evaluation of parallel
database systems (DeWitt, 1992). It indicates the
degree to which adding processors decreases the
runtime. In our context, the relative speedup for p
threads is defined as S
p
=RT
1
/RT
p
, where RT
1
is the
runtime with one thread and RT
p
is the runtime with
p threads. An ideal S
p
is equal to p. That is, the curve
of an ideal S
p
is a linear diagonal line.
Figures 8 and 9 illustrate an almost linear curve
for p-MDAG approach. There are some points in the
curve where the p-MDAG runtime is bellow the
linear. The attribute-based data cube decomposition
strategy associates a set of attribute values to group
1 and 2. Sometimes, each thread is associated to
more attribute values than others. In our example,
when we run three threads one thread of group 1 is
associated to four attribute values and the other two
threads are associated to three attribute values of
dimension A. The same occur to group 2 threads,
i.e., B, C and D cardinalities have no exact division
by three. Besides unbalanced attribute values
association, the skew can be high and the sampling
method can output incorrect approximate
frequencies, as illustrated in Figure 9. The skew
affects the sampling methods results and all other
data cube decomposition strategies of the literature.
p-MDAG - A Parallel MDAG Approach
327
In the second set of experiments, we present the
runtime and memory consumption of each thread of
groups 1 and 2. We use the same base relation with
8 dimensions, cardinality 10 on each dimension,
skew 0 and 1M tuples. Due to the similarity in the
load balance results, we omit the graphics where we
change the skew, cardinality and number of tuples.
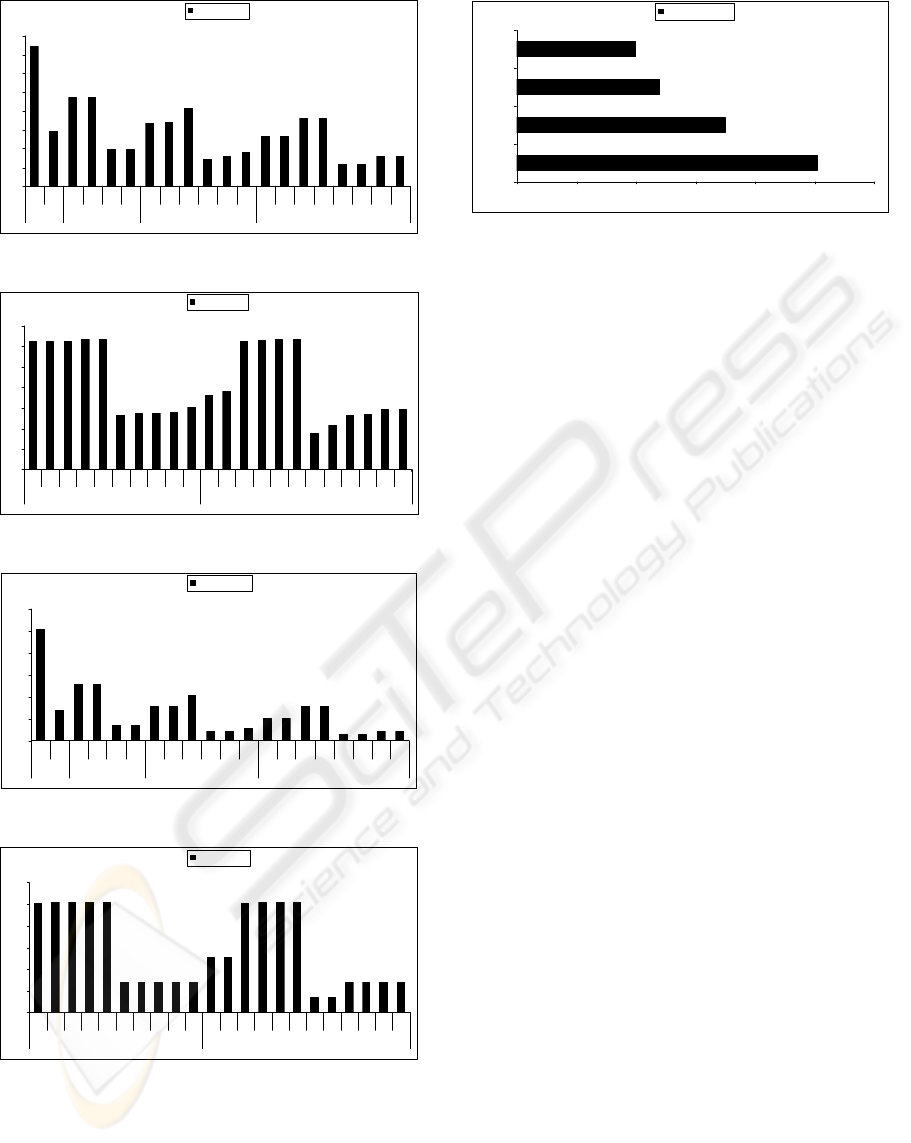
Figures 10 and 11 illustrate the runtime when we
increase the number of threads from one to six. In
Figure 12 and 13, we present the memory
consumption for the same experiment.
In Figures 10-13, we consider T11, T12, … T16
threads of group 1 and T21, T22, … T26 threads of
group 2. In general, the p-MDAG has a good load
balance, since group 1 and 2 are not executed
simultaneously. Groups 1 and 2 must be analysed
separately.
In Figure 14, we test the IO thread scalability.
We simulate a base relation with 5 dimensions, skew
0, cardinality 30 on each dimension and 5M tuples.
The base relation is divided into 2, 3 and 4 equal
size files. Each IO thread reads its file and inserts the
tuples in the resources according to the attribute
values of one dimension. In general, the IO threads
scale well, since we have a synchronized point in the
resources and a contention on the bus system to
consider.
0
5
10
15
20
25
30
35
40
45
50
123456
threads
runtime (sec)
pMDAG-C100 pMDA G-C80 pMDA G-C60 pMDA G-C40 pMDA G-C20
Figure 4: Cardinality D=5, T=1M, S=0.
0
10
20
30
40
50
60
123456
threads
runtime (sec)
pMDAG-T5M pMDAG-T4M pMDA G-T3M pMDAG-T2M
Figure 5: Tuples D=5, C=30, S=0.
0
20
40
60
80
100
120
123456
threads
runtime (sec)
pMDAG-8D pMDAG-7D pMDAG-6D pMDA G-5D
Figure 6: Dimension C=10, T=1M, S=0.
0
20
40
60
80
100
120
140
123456
threads
runtime (sec)
pMDAG-S0.5 pMDAG-S1 pMDA G-S1.5 pMDAG-S2 pMDAG-S2.5
Figure 7: Skew D=6, T=1M, C=100.
0
1
2
3
4
5
6
7
123456
threads
speedup
pMDAG linear
Figure 8: p-MDAG dimension speedup.
0
1
2
3
4
5
6
7
123456
threads
speedup
pMDAG linear
Figure 9: p-MDAG skew speedup.
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
328
0
10
20
30
40
50
60
70
80
T11T21T11T12T21T22T11T12T13T21T22T23T11T12T13T14T21T22T23T24
1 thread 2 threads 3 threads 4 threads
runtime (sec)
Figure 10: Threads runtime from 1-4.
0
5
10
15
20
25
30
35
T11T12T13T14T15 T21T22T23T24T25T11T12T13T14T15T16T21T22T23T24T25T26
5 threads 6 threads
runtime (sec)
Figure 11: Threads runtime from 5-6.
0
100
200
300
400
500
600
T11 T21 T11 T12 T21 T22 T11 T12 T13 T21 T22 T23 T11 T12 T13 T14 T21 T22 T23 T24
1 thread 2 threads 3 threads 4 threads
memo ry ( MB)
Figure 12: Threads memory consumption from 1-4.
0
20
40
60
80
100
120
T11 T12 T13 T14 T15 T21 T22 T23 T24 T25 T11 T12 T13 T14 T15 T16 T21 T22 T23 T24 T25 T26
5 threads 6 threads
memo ry ( MB)
Figure 13: Threads memory consumption from 5-6.
024681012
1 disk
2 disks
3 disks
4 disks
IO runtime (sec)
Figure 14: IO threads scalability.
4 DISCUSSION
In this section, we discuss a few issues related to p-
MDAG and point out some research directions.
There is vulnerability in p-MDAG design,
illustrated in Figure 3. The MDAG sequential
approach can compute full or iceberg cubes. Iceberg
cubes cannot be computed efficiently using thread
group 1 and 2. Unfortunately, the hybrid iceberg
computation of MDAG (top-down computation with
bottom-up pruning) cannot prune infrequent nodes
of group 1 partitions, since these infrequent nodes
can become frequent when aggregated in group 2
partitions. An alternative to solve the iceberg cube
problem is illustrated in Figure 15.
In the second design, the resources and the
threads of group are associated to one or more
attribute values of each dimension of a data cube.
We use a simple association a
1
b
1
c
1
d
1
… a
n
b
n
c
n
d
n
to
facilitate the explanation. For each tuple the IO
thread inserts, in the worst case, D different tuples in
D different resources, where D is the number of
dimensions in a data cube. For example, if the
resources are configured using the attribute values of
Figure 15, a tuple a
1
b
2
c
3
d
4
will demand a
1
b
2
c
3
d
4
insertion on resource
a1b1c1d1all
, b
2
c
3
d
4
insertion on
resource
a2b2c2d2
, c
3
d
4
insertion on resource
a3b3c3d3
and
d
4
insertion on resource
a4b4c4d4
. The same example
using the logical design presented in Figure 3
demands one insertion of a
1
b
2
c
3
d
4
on resource
a1
.
The original thread group 1 generates part of the
base cuboid during the tuples insertion. Only after
the complete tuples insertion the threads of group 1
start the generation of the aggregations. Using the
logical design illustrated in Figure 14, each thread of
group 1 generates part of both base cuboid and each
aggregated cuboid, i.e., it generates, for example,
a
1
BCD, b
1
CD, c
1
D and d
1
cells instead of only
a
1
BCD cells.
In summary, each thread of group 1, illustrated in
Figure 15, will demand longer time to insert the
p-MDAG - A Parallel MDAG Approach
329
same number of tuples when compared to each
thread of group 1, illustrated in Figure 3.
Figure 15: p-MDAG logical design II.
On the other hand, after the base and some
aggregated cuboids generation by thread group 1,
the same group can perform the generation of the
remaining aggregations, pruning infrequent nodes
efficiently, as (Lima, 2007) (Xin, 2007) do
sequentially. The all node can be generated by one
of the resources. After a tuple insertion in the
resource the IO thread also updates the all node in
the same resource. After the last tuple insertion in
the last file, a specific thread is notified to insert the
all node on its cube partition.
The logical design illustrated in Figure 15
increases the number of tuples on each resource and
the number of initial insertions of thread group 1, so
it must be studied carefully.
The advantage of a distributed-memory or
shared-nothing architecture is that accesses to local
data can be quite fast. On the other hand, accesses to
remote memories require much more effort. In
general, data placement is important to reduce the
number of data references, since any data reference
requires communication. (Dongarra, 2003)
The logical design proposed in Figure 3 requires
remote access to resources and partitions
manipulated by thread group 1. Each partition can
have million of nodes and each thread of group 2
must scan all partitions of group 1, so there is a
communication overhead. The logical design,
illustrated in Figure 15, requires remote access to
resources only, but additional tuples can increase the
communication overhead. In summary, we have to
accomplish some experiments with different
architectures and both logical designs presented in
this paper, since distributed-memory architecture
introduces communication overhead and shared-
memory architecture introduces contentions on the
bus system.
The utilization of secondary memory is another
aspect to be considered. Parallel approaches partition
the data cubes. Each partition can be stored to disk,
enabling one partition per time in main memory.
One may also consider the case that even a specific
partition may not fit in memory. For this situation,
occurred specially in distributed-memory
architectures where each processing node has only
one cube partition, the projection-based pre-
processing, proposed in (Han, 2001), can be an
interesting solution.
Finally, we must consider how queries can be
designed. We believe that any cube query method,
including iceberg, top-k, point, inquired and rank
query methods, can be easily integrated with p-
MDAG approach.
5 CONCLUSIONS
In this paper, we present a novel parallel cube
computation and representation approach, named p-
MDAG. The p-MDAG approach proposes an
attribute-based data cube decomposition strategy
which combines both task and data parallelism. The
p-MDAG approach uses the dimensions attribute
values to partition the data cube. It also redesigns the
two phase (base and aggregation phases) MDAG
sequential algorithms to run in parallel. In general,
p-MDAG approach has both good load balance and
similar memory consumption among its threads, as
our experiments demonstrate. Its logical design can
be implemented in shared-memory, distributed-
memory and hybrid architectures with minimal
adaptation.
The logical design has vulnerability in
computing iceberg-cubes. We propose an alternative
design to solve the problem. The iceberg logical
design, illustrated in Figure 15, must be tested in
shared-memory architecture. Moreover, both designs
must be tested in distributed-memory and hybrid
architectures. Finally, an interesting study is the
development of some extensions to enable p-MDAG
to use efficiently secondary memory during the cube
computation.
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
330

REFERENCES
Beyer, K. and Ramakrishnan, R. Bottom-up computation
of sparse and Iceberg CUBEs. SIGMOD, 28(2):359–
371, 1999.
Chen, Y., Dehne, F., Eavis, T. and Rau-Chaplin, A.
Parallel ROLAP data cube construction on shared-
nothing multiprocessors. Distributed and Parallel
Databases, 15:219-236, 2004.
Chen, Y., Dehne, F., Eavis, T. and Rau-Chaplin, A. PnP:
sequential, external memory, and parallel iceberg
cube computation. Distributed and Parallel Databases,
23(2):99-126, 2008.
Dehne, F., Eavis, T., and Rau-Chaplin, A. Parallelizing
the data cube. Distributed and Parallel Databases,
11(2):181-201, 2002.
Dehne, F., Eavis, T., Hambrush, S. and Rau-Chaplin, A.
Parallelizing the data cube. International Conference
on Database Theory, 2001.
DeWitt, D. and Gray, J. Parallel database systems: the
future of high performance database systems.
Communications of the ACM, 35(6):85-98, 1992.
Dongarra, J., Foster, I., Fox, G., Gropp, W., Kennedy, K.,
Torczon, L. and White, A. Source Book of Parallel
Computing. Morgan Kaufman, 2003.
Goil, S. and Choudhary, A. High performance OLAP and
data mining on parallel computers. Journal of Data
Mining and Knowledge Discovery, (4), 1997.
Goil, S. and Choudhary, A. High performance
multidimensional analysis of large datasets. First
ACM International Workshop on Data Warehousing
and OLAP, pages 34-39, 1998.
Goil, S. and Choudhary, A. A parallel scalable
infrastructure for OLAP and data mining.
International Database Engineering and Application
Symposium, pages 178-186, 1999.
Gray, J., Chaudhuri, S., Bosworth, A., Layman, A.,
Reichart, D., Venkatrao, M., Pellow, F. and Pirahesh,
H. Data cube: A relational aggregation operator
generalizing group-by, cross-tab, and sub totals. Data
Mining and Knowledge Discover, 1(1):29–53, 1997.
Han, J., Pei, J., Dong, G. and Wang, K. Efficient
computation of iceberg cubes with complex measures.
SIGMOD, pages 1–12. ACM, 2001.
Han, J., Kamber, M. Data Mining Concepts and
Techniques. Morgan Kaufman, 2006.
Lakshmanan, L.V.S., Pei, J. and Han, J. Quotient cube:
How to summarize the semantics of a data cube.
VLDB’02, pages 778–789. Morgan Kaufmann, 2002.
Lima, J.C. and Hirata, C.M. MDAG-Cubing: A Reduced
Star-Cubing Approach. SBBD, 362-376, October
2007.
Lu, H., Yu, J., Feng, L. and Li, X. Fully dynamic
partitioning: Handling data skew in parallel data cube
computation. Distributed and Parallel Databases,
13:181-202, 2003.
Li, X., Han, J. and Gonzalez, H. High-dimensional OLAP:
A minimal cubing approach. In VLDB’04, pages 528–
539. Morgan Kaufmann, 2004.
Muto, S. and Kitsuregawa, M. A dynamic load balancing
strategy for parallel data cube computation. ACM 2
nd
Annual Workshop on Data Warehousing and OLAP,
pages 67-72, 1999.
Olken, F., and Rotem, D. Random sampling from database
files - a survey. In 5th International Conference on
Statistical and Scientific Database Management, 1990.
Xin, D., Han, J., Li, X. and Wah, B.W. Star-Cubing:
Computing Iceberg Cubes by Top-Down and Bottom-
Up Integration. VLDB’03, pages 476-487. Morgan
Kaufmann, 2003.
Xin, D., Han, J., Li, X., Shao, Z. and Wah, B.W.
Computing Iceberg Cubes by Top-Down and Bottom-
Up Integration: The StarCubing Approach. IEEE
Transactions on Knowledge and Data Engineering,
19(1): 111-126, 2007.
Xin, D., Shao, Z., Han, J., and Liu, H. C-cubing: Efficient
computation of closed cubes by aggregation-based
checking. ICDE’06, page 4. IEEE Computer Society,
2006.
Zhao, Y., Deshpande, P., and Naughton, J. F. An array-
based algorithm for simultaneous multidimensional
aggregates. SIGMOD, pages 159–170. ACM, 1997.
p-MDAG - A Parallel MDAG Approach
331
