
Search Space Restriction of Neuro-evolution through
C
onstrained Modularization of Neural Networks
Christian W. Rempis
1
and Frank Pasemann
1,2
1
Neurocybernetics Group, Institute of Cognitive Science
University of Osnabr¨uck, 49069 Osnabr¨uck, Germany
2
Institute for Advanced Study, Wallotstr. 19, 14193 Berlin, Germany
Abstract. Evolving recurrent neural networks for behavior control of robots
equipped with larger sets of sensors and actuators is difficult due to the large
search spaces that come with the larger number of input and output neurons. We
propose constrained modularization as a novel technique to reduce the search
space for such evolutions. Appropriate neural networks are divided manually into
logically and spatially related neuro-modules based on domain knowledge of the
targetedproblem. Then constraint functions are applied to these neuro-modules to
force the compliance of user defined restrictions and relations. For neuro-modules
this will facilitate complex symmetries and other spatial relations, local process-
ing of related sensors and actuators, the reuse of functional neuro-modules, fine
control of synaptic connections, and a non-destructive crossover operator. With
an implementation of this so called ICONE method several behaviors for non-
trivial robots have already been evolved successfully.
1 Introduction
The development of recurrent neural networks for behavior control of autonomous
robots with evolutionary methods has a long and successful history [10], [4], [6]. Nev-
ertheless, most experiments work with robots having only a small number of sensors
and actuators, as in typical experiments described in [9], [8]. Although interesting non-
trivial behaviors have to be expected to come up especially with complex robots having
a larger number of sensors and actuators, only few experiments have been conducted in
this domain. One main reason is that the search space for neuro-controllers gets incon-
veniently large if more and more sensor and motor neurons have to be used. This often
makes it infeasible to evolve interesting solutions in reasonable time.
To cope with such large search spaces, strategies and heuristics have to be found
that reduce the search space or that assist the experimenter to guide evolution towards
effective network topologies. In this contribution, we propose that the manual segmen-
tation of neural networks into smaller, constrained sub-networks, called neuro-modules
[11][9], can significantly restrict the search space. This constrained modularization is
based on domain knowledge about the behavior problem to be solved. The induced re-
strictions on the modules exclude large parts of the search space and focus the search
on network topologies that have a higher chance to provide a desired solution. The kind
W. Rempis C. and Pasemann F. (2010).
Search Space Restriction of Neuro-evolution through Constrained Modularization of Neural Networks.
In Proceedings of the 6th International Workshop on Artificial Neural Networks and Intelligent Information Processing, pages 13-22
Copyright
c
SciTePress

of solution hereby can be biased by the experimenter to a large extend during the mod-
ularization. Furthermore resulting network topologies often are better to understand
than unconstrained ones, allow an easier identification of relevant network parts, and
make the reuse of already evolved networks structures possible. With this approach the
evolutionary algorithm is not used as a universal problem solver that creates complex
networks from scratch. Instead evolution is used merely as a tool to help the experi-
menter to confirm his specific solution approaches, that are usually still too complex to
be constructed by hand.
In the next chapter we define the terms constrained modularization, neuron group
and neuro-module as they are used here. Then, in chapter 3, we describe how modular-
ization of large neural networks can reduce the search space and why resulting solutions
of modular neuro-evolution often are easier to understand. First indications of the us-
ability of this approach, based on the implementation of this method, are discussed in
chapter 4 and 5, followed by a conclusion in the final chapter.
2 Constrained Modularization of Neural Networks
2.1 Constrained Modularization
The decomposition of a recurrent neural network into smaller, hierarchically and spa-
tially organized sub-networks is here called modularization. A network hereby is, based
on domain knowledgeand user experience,manually split into connected neuron groups
by the experimenter (Fig.1 shows an example). To each neuron group functional con-
straints can be added, that force the compliance of user defined limitations or structural
restrictions. These constraint functions can implement any restriction and manipulate
the neural network directly, so that violations of constrains, e.g. originating from muta-
tion operators, can be counteracted immediately.
With this constrained modularization the user tries to restrict the network develop-
ment in such a way, that only a certain, promising type of network structures is possi-
ble. Hereby the user constructs a kind of constraint mask for the neural network, that
specifically limits the network topology and thus leads to a smaller search space for the
evolutionary algorithm.
Neurons can be grouped in two different ways: (1) by simple neuron groups, or
(2) by more restrictive neuro-modules. Neuron groups and neuro-modules both allow
a detailed topological, hierarchical and functional partition of the network to exclude
unwanted areas of the search space. Both types of grouping are defined in the next two
sections.
2.2 Neuron Groups
The simplest way to group neurons is the creation of neuron groups. These groups
may contain any number of neurons sharing topological, functional or other proper-
ties. Hereby neuron groups can arbitrarily overlap. Thus each neuron can be part of
many neuron groups at the same time. Neuron groups can be target of constraint func-
tions. These functions force the compliance of certain, user defined constraints, rules

and heuristics for their member neurons. This may include, for example, limiting the
number of member neurons or synapses, forcing specific kinds of synaptic connection
patterns, allowing synaptic plasticity for its members or resolving dependencies be-
tween neurons and synapses. The constraint functions therefore define the purpose of a
group and contribute significantly to a search space restriction.
2.3 Neuro-modules
A stronger grouping of neurons is represented by so called neuro-modules. Neuro-
modules are similar to neuron groups, but do not intersect partially; i.e., neurons can
only be part of a single neuro-module at the same time. However, neuro-modules can
be members of other neuro-modules and therefore can serve as sub-modules.
Neurons in a neuro-module are encapsulated by the module. Thus these neurons are
only visible to the neurons of the same neuro-module. To connect the module with
external neurons, it can provide a neural interface. This can be achieved by mark-
ing selected neurons of the module as input or output neurons (compare Fig.1 where
these neurons are marked with I and O ). During evolution synaptic connections are
inserted only between members of the same neuro-module and to interface neurons of
sub-modules. Neuro-modules thus can be regarded as encapsulated, independent neural
building-blocks with well defined interfaces. Their special purpose is to group strongly
related neurons together (e.g. the sensors and motors of a joint or the neurons of a func-
tional structure) and to control the way these neurons can connect to neurons outside of
the module.
3 How Constrained Modularization Fosters Successful Evolutions
Modularizing and constraining a neural network according to domain knowledge of
a behavioral problem can restrict the search space for neuro-evolution significantly.
For comparison, an unconstrained minimal neuro-controller for walking of a humanoid
robot with 42 motor and 37 sensor neurons already allows over 3300 synapses, while the
same, but constrained modular network in Fig. 1 only allows 180 independent synapses.
In this figure it can also be seen, that the modularized network is much more structured
than an unconstrained one. It shows, that the constrained network already biases the
possible network structures, here to get a symmetric network for walking based on
internal oscillators or on an acceleration sensor (at the top module). This also shows that
the initial networks for a neuro-evolution have to be specifically modularized regarding
the given problem to be solved.Therefore, even for the same problem, different kinds of
modularization promote different approaches to solutions. Experimenters can use this
to bias the networks towards desired solution approaches.
Constrained modularization reduces the search space by constraining the structure,
function and evolution process of the networks, as is described in the next sections.
3.1 Structure Constraints
Neuro-modules, with their ability to hierarchically structure a network and to shield
their members from disruptive connections from arbitrary sources, bias the network
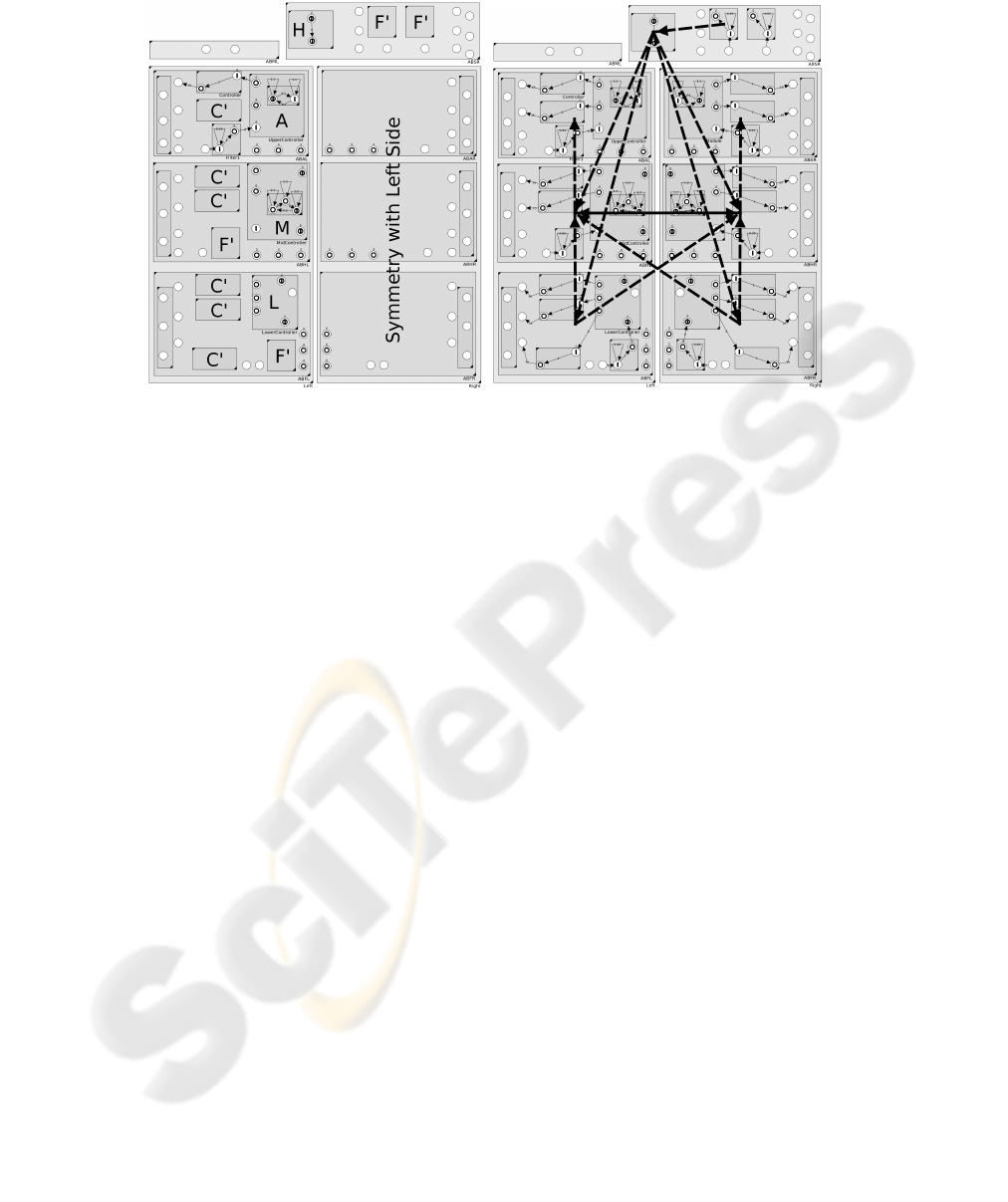
Fig.1. Left: Constrained modularization of the control network of a humanoid robot. The 37
sensor and 42 motor neurons are separated into modules according to their locations on the robot
(head, arms, middle body, legs). A symmetry constraint handles the neural structure of the right
side. The upper left module was extended by an evolvable controller module and a filter module.
Clones of these modules (C’ and F’) have been added to each used motor neuron and acceleration
sensor. Additional functional modules have been added (H, A, M, L) that can be exchanged during
crossover by modules of the same type. These modules are expected to implement the actual
behavior controller. During evolution neurons are only added to these functional modules. In
(A) and (M) oscillator modules have been added that might be modified and incorporated into
the control network. Right: This network is the result of executing the constraints for the left
network. To additionally restrict the search space, synaptic pathways (Black Dotted Lines) have
been added.
topologies towards local processing units, rather than towards networks with high con-
nectivity. This excludes many – in principle also potentially successful – topologies.
But as a heuristic, large, highly connected networks tend to be unable to evolve com-
plex local processing sub-networks, because synapses from arbitrary sources influence
most neuron clusters in a disturbing way. This problem increases as the number of neu-
rons in the network gets larger, because the probability for a synapse to be unrelated,
and therefore potentially disruptive, increases with every neuron. Therefore we expect
highly connected networks to have a lower probability to provideinteresting, non-trivial
solutions [1]. Therefore neuro-modules can be used to promote plausible connections
based on domain knowledge, such as grouping motors and sensors of the same joint
together. Neuro-modules also allow the definition of synaptic pathways, i.e. to prevent
or permit connections between modules explicitly.
A powerful constraint on the structure of neuron groups is the definition of symme-
tries and repetitive structures. Depending, of course, on the targeted behavior problem,
many evolutions can be greatly restricted when the desired network is assumed to be
symmetric. Examples are walking or squatting of a humanoid robot or the repetitive
structure of a multi-legged walking machine. Symmetries remove large parts of the

search space, because the parameters of all symmetrized neurons and synapses are not
part of the search space any more (e.g. the entire right side in Fig. 1).
An additional positiveeffect on the structure using modularizationis the better read-
ability of the resulting networks (see Fig. 1). Functional elements can be isolated more
easily and signal paths can be better traced, because most synapses are locally con-
nected and have less dependencies to other parts of the network.
3.2 Functional Constraints
Neuro-modules bias evolution to evolve local processing units, that are often related to
local functions. Although, admittedly, it can not be guaranteed that the evolved structure
of a module implements a single, well defined function, the tendency still is towards
functions distributed over only a few, local modules. This still simplifies the isolation
of such functions when an evolved network is analyzed.
Neuro-modules can also be used to represent predefined functional units, that may
origin from previous evolutions or analytic reasoning. Once a functional processing unit
is found by evolution, it can be reused in future evolutions as neural building block.
Forcing evolution to reinvent already known processing units in each evolution from
scratch only blows up the search space without any gain from the scientific perspective.
With an additional neuro-module insertion mutation operator that can insert predefined
neural building blocks from a library, larger, functionally more complex networks can
evolve in shorter time.
Neural building-blocks can also be constrained with very specific constraint func-
tions. Because building blocks can be constructed by hand – although often based on
evolved structures – specialized constraint functions can be added. Such functions can
be used to ensure, for instance, that the function or complex structure of a module is
preserved independently of the mutations taking place. They can also be used to de-
sign complex modules, such as neural fields [3], memory units [15], oscillators [12],
structures with adaptive synapses and the like.
Constraints can also be used to clone a mutable neuro-module and to reuse the
same network structure in multiple places of the network. In this way the function of
this module can still evolve, while it is used with all modifications in several places,
profiting from enhancements immediately. A common usage of this is the definition of
sensor filters or motor controllers (as in Fig. 1), where the same structure is required for
any sensor or motor of the same type. If the sensor or motor works similar in all places,
then the controller has not to be optimized multiple times.
3.3 Evolutionary Constraints
Neuro-modules are a suitable target for modification operators during evolution. Be-
cause neuro-modules are well structured, providing a specific interface to their sur-
rounding network parts, they can be exchanged and replaced with only little impact on
the rest of the network. This enables the usage of modular crossover. Crossover in most
neural network implementations is highly destructive due to the potentially large struc-
tural differences between parents. Crossover between such unrelated networks most
probably produces networks that are less fit than both of their parents, so that most of

these networks usually do not survive. Modular crossover is less affected by this prob-
lem, because crossover takes place only at well defined network parts, namely at the
module level. Modules are only replaced by compatible modules, which means that
their interfaces match and the module types are similar.
In addition to module exchange between parents, modules may also be exchanged
by compatible modules from a library of predefined building blocks or by neuro-modules
co-evolving with the behavior controllers in their own populations.
A particular benefit of constrained modularization for evolution is that the approach
to solve a given behavior problem can be biased to a large extend in advance. This way
the experimenter does not only specify the problem to be solved, but also influences to
a high degree, how the problem is going to be solved. Also, the iteration of evolutions
becomes much easier: The behavior problem may be solved first by applying sharp
restrictions on the evolving networks. Then, iteratively, the network can be opened for
new solution approaches to stepwise enhance the behavior.
4 Application
The modularization approach with the described features has been implemented in the
ICONE (Interactively Constrained Neuro-Evolution) method. Currently the implemen-
tation supports structure evolution based on neuron, synapse and neuro-module inser-
tions. Explicit specifications of neural pathways between neuro-modules are consid-
ered, as well as connection restrictions induced by the hierarchical interfaces of neuro-
modules. Neuron groups and neuro-modules can be restricted with arbitrary, user de-
fined constraint functions, such as symmetry, cloning and restrictions of neuron and
synapse structures. A library of neuro-modules as basic building blocks is under con-
tinuous construction, including neuro-modules for different kinds of oscillations, mem-
ory, joint controllers, sensor filters, event detections, context switches and behavior in-
terpolation. During evolution all aspects of the evolutionary algorithm can be modified
on-line to guide evolution through the search space.
Manually modularizing large networks is not trivial. Therefore a graphical neural
network editor was implemented that supports the visual manipulation of all mentioned
aspects of the neural networks. Without such an editor, modularization is difficult to
apply.
5 Examples
The modularization technique has been applied to develop neuro-controllers for sev-
eral complex robots. These robots include for instance the six legged walking machine
Octavio with 24 sensor and 18 motor neurons, and the A-Series humanoid robot with
37 sensor and 42 motor neurons. The developed behaviors include – among others –
different kinds of walking, squatting and stabilized standing.
Some examples are shown in Fig. 2 and Fig. 3. Due to space limitations, details on
the evolved behaviors will be presented in upcoming publications. But it can be said,
that with pure structure evolution solutions for these kind of problems could not be
found at all.
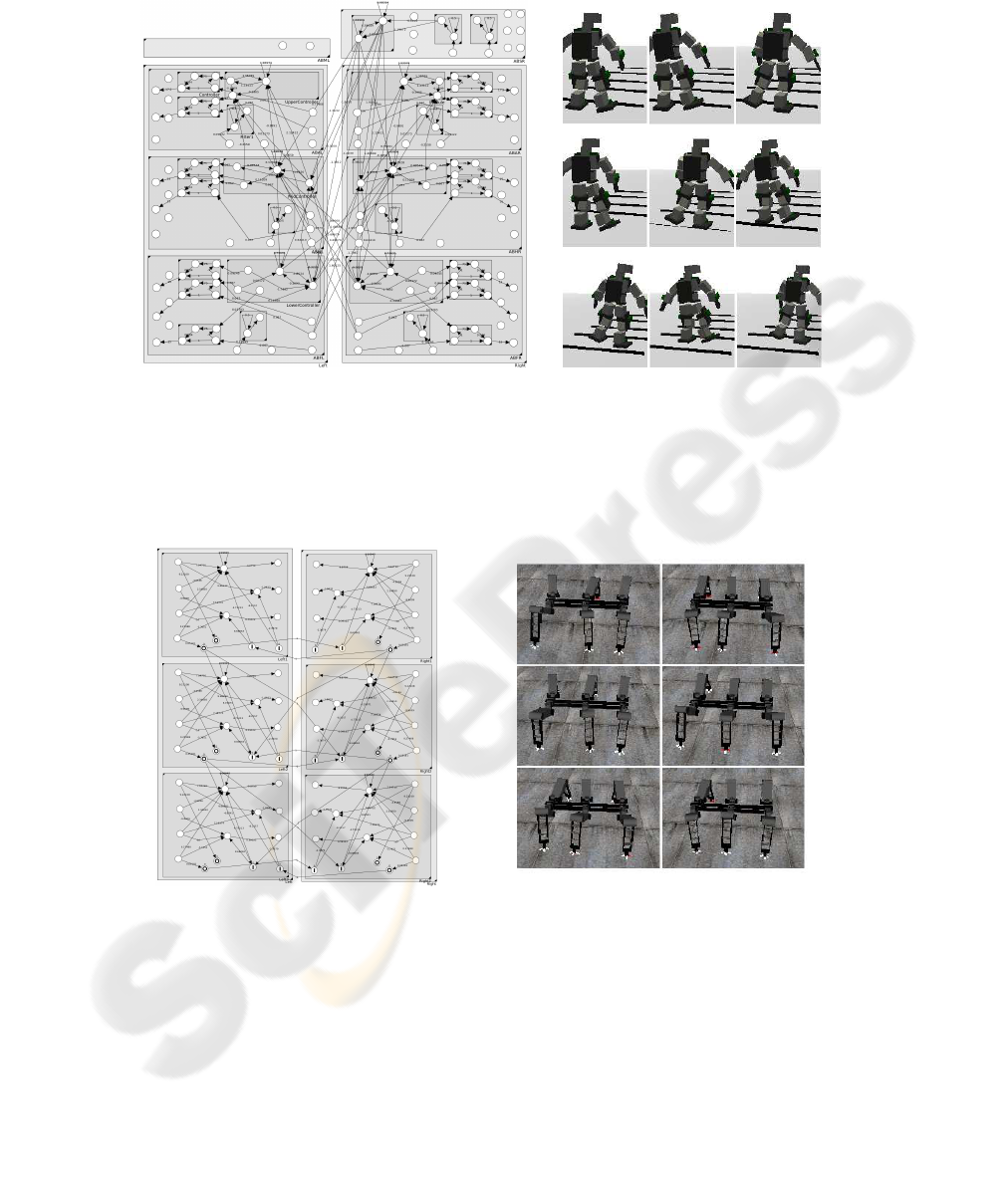
Fig.2. Network and time-series of an evolved neuro-controller for walking with the A-Series
humanoid, based on a constrained initial network similar to Fig. 1. The initial network was con-
strained to search for solutions based on the acceleration sensors of the shoulder (Mid of Upper
Right Module). Substantially different networks can be produced starting with internal pattern
generators as in Fig.1. [Evolution: ≈ 400 generations with 150 individuals].
Fig.3. Network and time-series of an evolved neuro-controller for walking with the 6-legged
walking machine Octavio. Here only one leg controller (Upper Left) is evolved, all other legs
clone this prototype controller. In addition the network has a right / left symmetry. The focus
of this experiment is to find a universal leg controller for a multi-legged walking machine and
appropriate interconnection patterns. With minor adjustments of the constraints the focus of the
experiment can be changed, e.g. to find specialized leg controllers for front, mid and hind legs.
[Evolution: ≈ 300 generations with 100 individuals].

6 Discussion
Modularizing a network by applying domain knowledge and user experience obviously
restricts the search space for neuro-evolution algorithms. Attempts to restrict the search
space have been conducted by many authors, because without restrictions the evolution
of large network topologies of non-trivial robots becomes infeasible.
A common approach is the use of specific genome representations, that imply for
instance a fully symmetric network [7], [13]. This approach can be compared to mod-
ularization with symmetry constraints. But because the symmetry is embedded directly
in the genome representation or in the genotype-phenotype mapping, a new genome
type has to be created for each new experimental scenario. Also complex, stacked sym-
metries are difficult to set up. During evolution such genomes are rigid and can not
be extended if needed. Using, as proposed here, constraint functions to influence the
relations of network parts, symmetry can be implemented as a simple extension of the
network genome and can easily be removed or changed without changing the genome
type. Furthermore constraints are not restricted to symmetry, but can enforce any kind
of structural dependency, like complex spatial connections as used in neural fields [3].
Another approach to reduce the search space is to focus only on specific parts of the
target robot. For instance, walking may be evolved with only the legs of a humanoid
robot, replacing the entire upper body by a simple block of comparable mass [13]. This,
indeed, reduces the search space, because all motors and sensors of the simplified body
parts have been removed. Though, extending such a controller to the full robot becomes
difficult, because the evolved controllers will ignore the influence of the other moving
body parts. Also, for each new approach, a new simulated robot has to be designed, that
focuses on the desired motor and sensor aspects, and therefore also iterative evolution
in small steps becomes more difficult. With the proposed modularization technique,
the complex target robot can be used right from the beginning. Unwanted sensors and
motors can be excluded in the beginning by synaptic pathway restrictions and can be re-
enabled at any time during the evolution. Therefore the evolution can start with a min-
imal subset of the robot’s actuators and sensors, but can still include the non-essential
robot parts to further optimize the controllers.
A third popular search space restriction approach is structure reuse. In most cases
structure reuse is implemented within developmental evolution systems, like Cellular
Encoding [5], where the genotype is mapped to a phenotype by applying a sequence
of construction rules. These algorithms have been shown to reuse structures in multiple
places while evolving the structure blue-prints only once. A disadvantage of such de-
velopmental approaches is, that the resulting modular structures are difficult to isolate
for later usage. Furthermore, it is difficult to translate a complex starting network with
this kind of modularity into its genotype representation, and to monitor and manipu-
late these modular structures during evolution. Neuro-modules as building blocks on
the other hand do not require a complex mapping from genotype to phenotype and thus
can be reused as entire structure with little effort. Other techniques [2], such as Mod-
ular NEAT [14], try to automatically define neuro-modules as building-blocks without
a complex genotype-phenotype mapping. But also here, functional modules have to be
reinvented in every evolution, because predefined modules can not be used. Further-
more, the reused sub-networks are arbitrarily aligned to the input and output neurons

without domain knowledge, so that – especially in large networks – proper use of the
modules becomes unlikely again.
Constrained modularization allows the utilization of all mentioned search space
restriction methods in a uniform, extensible framework. With appropriate libraries of
functional neuro-modules new types of larger control networks can be developed, that
might give deeper and even new insights into neural organization of behavior. Con-
strained modularization as a general principle does not really restrict experimenters in
their approaches, because new approaches can be simply implemented by introducing
new constraint functions.
7 Conclusions
In this contribution it was discussed how constrained modularization of large neural
networks for robot control can significantly reduce the search space for neuro-evolution
processes. Large neural networks can be spatially and logically partitioned by neu-
ron groups and neuro-modules. Both types of grouping can be the target of constraint
functions, that force the compliance of – partly very specific – constraints, such as net-
work symmetries, dependencies, module cloning and connectivity structures between
or within modules. The modularization is done manually to apply domain knowledge
and to bias the search towards desired solution approaches. In this way the search space
is restricted by the user to a well defined potential solution space, which increases the
chance to find appropriate solutions. For modular neural networks new types of evo-
lution operators are defined: modular crossover and neuro-module insertions. Modular
crossover allows the exchange of sub-networks in a minimally destructive way. Inser-
tions of functional neuro-modules as mutation allow the extension of a network with
already working functional sub-networks, which eases the transfer of findings from pre-
vious evolutions and relieves evolution from reinventing already known structures. The
described approach has been used to develop different behaviors for several robots with
many sensors and actuators, including a multi-legged walking machine and humanoid
robots. Detailed results are described in upcoming publications.
Acknowledgements
The authors thank Arndt von Twickel and Manfred Hild for many inspiring discussions.
Thanks also to Verena Thomas and Ferry Bachmann for their contributions to the sim-
ulation environment. This work was partly funded by EU-Project Number ICT 214856
(ALEAR Artificial Language Evolution on Autonomous Robots. http://www.alear.eu).

References
1. Beer, R.D. (2010). Fitness Space Structure of a Neuromechanical System. To appear in
Adaptive Behaviour.
2. Calabretta, R., Nolfi, S., Parisi, D., and Wagner, G. P. (2000). Duplication of Modules Facil-
itates the Evolution of Functional Specialization. Artificial Life, 6(1), pp. 69–84.
3. Coombes, S. (2005). Waves, Bumps, and Patterns in Neural Field Theories. Biological
Cybernetics, 93(2), pp. 91–1008.
4. Floreano, D., Husbands, P., and Nolfi, S. (2008). Evolutionary Robotics. In Siciliano, B. and
Khatib, O., editors, Springer Handbook of Robotics, pp. 1423–1451. Springer.
5. Gruau, F. (1995). Automatic Definition of Modular Neural Networks. Adaptive Behaviour,
3(2), pp. 151–183.
6. Harvey, I., Paolo, E., Wood, R., Quinn, M., and Tuci, E. (2005). Evolutionary Robotics: A
New Scientific Tool for Studying Cognition. Artificial Life, 11(1-2), pp. 79–98.
7. Hein, D., Hild, M., and Berger, R. (2007). Evolution of Biped Walking Using Neural Os-
cillators and Physical Simulation. Proceedings of the RoboCup 2007: Robot Soccer World
Cup XI.
8. H¨ulse, M., Wischmann, S., Manoonpong, P., von Twickel, A., and Pasemann, F. (2007).
Dynamical Systems in the Sensorimotor Loop: On the Interrelation Between Internal and
External Mechanisms of Evolved Robot Behavior. In Lungarella, M., Iida, F., Bongard,
J. C., and Pfeifer, R., editors, 50 Years of Artificial Intelligence, volume 4850 of Lecture
Notes in Computer Science, pp. 186–195. Springer.
9. H¨ulse, M., Wischmann, S., and Pasemann, F. (2004). Structure and function of evolved
neuro-controllers for autonomous robots. Connection Science, 16(4), pp. 249–266.
10. Nolfi, S. and Floreano, D. (2004). Evolutionary Robotics: The Biology, Intelligence, and
Technology of Self-Organizing Machines, ISBN 978-0262640565, Bradford Book.
11. Pasemann, F. (1995). Neuromodules: A Dynamical Systems Approach to Brain Modelling.
In Herrmann, H. J., Wolf, D. E., and Poppel, E., editors, Workshop on Supercomputing in
Brain Research: from tomography to neural networks, KFA Julich, Germany, World Scien-
tific Publishing Co.
12. Pasemann, F., Hild, M., and Zahedi, K. (2003). SO(2)-Networks as Neural Oscillators. Com-
putational Methods in Neural Modeling, 2686/2003, pp. 144–151.
13. Reil, T. and Husbands, P. (2002). Evolution of Central Pattern Generators for Bipedal Walk-
ing in a Real-Time Physics Environment. IEEE Transactions on Evolutionary Computation,
Vol.6(2), pp. 159–168.
14. Reisinger, J., Stanley, K. O., and Miikkulainen, R. (2004). Evolving Reusable Neural Mod-
ules. In Deb, K., et al., editors, Genetic and Evolutionary Computation – GECCO-2004, Part
II, volume 3103 of Lecture Notes in Computer Science, pp 69–81, Springer.
15. Rempis, C. W. (2007). Short-Term Memory Structures in Additive Recurrent Neural Net-
works. Master’s thesis, University of Applied Sciences Bonn-Rhein-Sieg, Germany.
