
THE CHEMNITZ HYBRID EVOLUTIONARY
OPTIMIZATION SYSTEM
Ulf Nieländer
Chemnitz University of Technology, Computer Science Department, Modelling & Simulation Group
09107 Chemnitz, Germany
Keywords: Genetic algorithms, Single
-
objective
/
Multi
-
objective optimization, CHEOPS, Omni Optimizer, Bench-
marking, Test functions.
Abstract: This paper introduces the Chemnitz Hybrid Evolutionary Optimization System to the scientific community.
CHEOPS is a non
-
standard, high
-
performance genetic algorithm framework allowing simple as well as
advanced modes of operation. Universal genetic algorithms well
-
suited for solving both single
-
and multi
-
objective optimization problems are still a matter of serious research. The Omni Optimizer was a milestone
in
that
research
topic,
but
now
it
is
dramatically
outperformed
by
CHEOPS
in
single
-
objective
optimization.
The comparison should soon continue, because CHEOPS will be straightforwardly enhanced to solve multi
-
objective problems as well.
1 INTRODUCTION
This paper introduces the Chemnitz Hybrid Evolu-
tionary Optimization System to the scientific com-
munity. Being developed as an Eng.
D. project, it is
described in full detail by Nieländer (2009). Basical-
ly, CHEOPS is a non
-
standard, high
-
performance
genetic algorithm framework. However, CHEOPS is
still under construction. That is why the author
presents only single
-
objective optimization results
in the present paper, whereas CHEOPS will be
straightforwardly enhanced to solve multi
-
objective
problems as well. Omni Optimization, i.
e. using a
single algorithm for successfully and efficiently
solving different kinds of optimization problems
often encountered in practice, is a relevant research
topic. It has been coined by Deb and Tiwari (2005,
2008) in their pioneering papers. Therein they have
proposed the (extended) Omni Optimizer. However,
its single
-
objective optimization performance does
indeed cause serious doubts.
After this introduction, Section 2 presents and
discusses the basic features of CHEOPS. These
include representational issues, genetic operators,
selection methods, the cyclic mode of operation, and
the generational concept. Section 3 gives a brief out-
line of the opponent for the following comparison,
i.
e. the Omni Optimizer proposed by Deb and Tiwa-
ri (2005, 2008). Afterwards, the comparison between
the two GA is executed and assessed in Section 4.
Re
-
running the original benchmark tests now, CHE-
OPS outperforms the Omni Optimizer dramatically.
Section 5 discusses advanced modes of operation of
CHEOPS, whereas Section 6 points out to future
work of straightforwardly enhancing CHEOPS to
solve multi
-
objective problems as well. Finally,
Section 7 concludes the paper with a short summary.
2 THE BASIC FEATURES
OF CHEOPS
When developing and implementing an evolutionary
algorithm, the programmer has to think about five
major subjects:
How to represent candidate solutions and how to
arrange them in a population? How to produce new
candidate solutions from existing ones? How to
select preferably good and
/
or rather bad candidate
solutions from the population? How does it work
altogether in some optimization cycle? How to pro-
ceed to the next generation?
All these issues will be discussed in the follow-
ing subsections.
311
Nieländer U..
THE CHEMNITZ HYBRID EVOLUTIONARY OPTIMIZATION SYSTEM .
DOI: 10.5220/0003059203110320
In Proceedings of the International Conference on Evolutionary Computation (ICEC-2010), pages 311-320
ISBN: 978-989-8425-31-7
Copyright
c
2010 SCITEPRESS (Science and Technology Publications, Lda.)

2.1 Representation of Candidate
Solutions
Originally, genetic algorithms have just used binary
chromosomes especially with Gray coding of all the
variables of the current optimization problem. Such
binary chromosomes can be used in CHEOPS that
are built
-
up from a sequence of bits. Evolution
strategies, however, have always used floating
-
point
chromosomes (i.
e. vectors of real numbers) being
much more suitable for real
-
parameter optimization.
Likewise, integer chromosomes are appropriate for
integer
-
parameter
optimization.
Moreover,
CHEOPS
handles permutation chromosomes for combinatorial
optimization solving e.
g. the famous traveling sales-
man problem.
For all the chromosome types there is an initiali-
zation procedure (random uniform sampling within
the search space) built into CHEOPS. A population
is just a large, panmictic set containing such indi-
viduals as current candidate solutions.
2.2 Genetic Operators
Remember the default mode of operation of genetic
algorithms: Two previously selected parent indi-
viduals are recombined with the offspring being
slightly modified afterwards to obtain some child
individuals. Thus, recombination
/
crossover is pri-
mary, whereas modification
/
mutation is secondary.
Quite the contrary applies to evolution strategies.
In nature, however, some species alternate the
way they reproduce themselves from one generation
to the next (agamogenesis vs. sexual reproduction),
whereas other creatures perform metagenesis to
survive the struggle for life. CHEOPS adapts this by
implementing a variety of genetic reproduction
operators for each chromosome type. In the context
of the present paper, only genetic operators for
floating
-
point chromosomes are relevant:
one
-
point crossover (biased
/
shuffled);
two
-
points crossover;
uniform crossover;
generalized linear crossover (standard
/
mixed);
BLX crossover;
intermediate crossover (standard
/ arithmetical
/
mixed);
shifting mutation (standard
/
reversed);
universal mutation (just copy, or uniform
mutation, or boundary mutation, or average
mutation, or Gaussian mutation, or Breeder
-
GA
mutation as well as mixed).
All these genetic operators implemented in CHE-
OPS are well
-
known from GA literature. That is
why the author does not go into detail here but refers
to Nieländer (2009) for further explanations.
Unlike the default mode of operation of genetic
algorithms and evolution strategies, CHEOPS does
not distinguish between primary and secondary
operators. Consequently, each such genetic operator
is just a procedure that takes some parent indi-
vidual(s) and produces some child individual(s).
How it actually does its job
-
by a mutation of one
parent individual or by crossover from two parent
individuals, and in doing so directly inspired by
genetics or otherwise by some heuristics or even
with another local or global optimization procedure
built into (i.
e. hybrid optimization)
-
is completely
irrelevant. Please note that arbitrary such genetic
operators can be implemented in CHEOPS by the
user as desired and
/
or required.
2.3 Selection Methods
The following selection methods are implemented in
CHEOPS for single
-
objective optimization:
unbiased roulette selection;
ranking selection (linear
/
exponential);
threshold uniform selection;
tournament selection (first
-
better
/
all
-
best).
Again, these selection methods are very common
in genetic algorithms and do not need further ex-
planations here (see Nieländer, 2009, again). They
are implemented in CHEOPS both ways, selecting
preferably good candidate solutions to reproduce
and rather bad ones to die. Moreover, CHEOPS
handles maximization as well as minimization prob-
lems without requiring the user to re
-
formulate them
prior to optimization. Thus, selecting a candidate
solution directly depends on how good or bad it
solves the current optimization problem compared to
all other individuals within the current population.
Please note that CHEOPS does not restrict selection.
Thus, at least in principle, each candidate solution
within the population may have a chance to repro-
duce and
/
or to die. That is why elitism is separately
keeping track of the best candidate solution(s) found
so far while the genetic algorithm is running.
2.4 Cyclic Mode of Operation
The successive sequence of what genetic operator
when produces new children is not predetermined.
This is due to chance in the randomized evolution
process. Of course, each genetic operator knows
how many parent individuals it needs to do its job.
Thus, so many candidate solutions will be selected
from the current population each by one of the
several selection methods implemented in CHEOPS.
ICEC 2010 - International Conference on Evolutionary Computation
312

What follows is the CHEOPS optimization cycle
pseudo
-
code:
Generate the initial population
using random uniform sampling
Repeat
Randomly choose one of the
genetic operators to apply next
Repeat
Randomly choose one of the
selection methods and select
(according to the current
optimization direction) an
individual from the population
to reproduce
Until all necessary parent indi-
viduals have been selected
Apply that genetic operator
producing child(ren) from the
parent(s)
Repeat
Randomly choose one of the
selection methods and select
(contrary to the current
optimization direction) an
individual from the population
to die
Replace that individual by
a child just produced
Until all the child individuals
have been assimilated into
the population
Until some stopping criterion is met
Someone might argue that this is too simple to
work well. Note, however, that CHEOPS does also
allow advanced and elaborated modes of operation
(see Section 5 for details). In the context of the
present paper, due to the reminder of De Jong (2006,
p. 3), we intentionally “‘Keep it simple, stupid!’
which turns out to be a surprisingly useful heuristic
for building evolutionary systems that we have some
hope of understanding!”
2.5 Steady State Concept
Resulting from the aside pseudo
-
code, good candi-
date solutions must first be selected as parents for
reproduction, and their children then replace bad
candidate solutions within the population (not allow-
ing a duplicate solution to be inserted). That is the
concept of a steady state genetic algorithm.
The main advantage of steady state genetic algo-
rithms is, that any good candidate solution produced
in the evolution process can immediately be selected
as parent individual for reproducing and hopefully
breeding still better child individual(s). Usually, this
speeds up the evolution process enormously com-
pared to generational genetic algorithms. Those fill
up some intermediate population and
/
or the next
generation with child individuals all of them being
produced from old parent individuals.
However, there is a drawback with steady state
genetic algorithms: inbreeding. Any especially good,
but maybe just locally optimal candidate solution
might be selected as parent again and again, thus
forcing too much exploitation over exploration and
continuously producing children related and possibly
similar to each other. Thus, it is essential for a
steady state genetic algorithm to implement some
counter
-
forces against inbreeding. That is why
CHEOPS simultaneously uses many different se-
lection methods as well as genetic operators. Hence,
the selective pressure varies and the genetic diversity
within the population is long
-
term maintained: Even
if the same parent individuals are being selected,
different child individuals will usually be produced
from them.
CHEOPS’ main control parameter setting a good
balance between exploitation and exploration is the
population size counting the number of candidate
solutions therein. Of course, a smaller population
favors exploitation over exploration
-
vice versa for
a larger population. Thus, optimization performance
depends on the population size as Section 4 reveals.
3 THE OMNI OPTIMIZER
Prior to 2005, single
-
and multi
-
objective problems
as well as uni
-
optimal or multi
-
optima problems
have usually been dealt with different optimization
algorithms. Then, in their pioneering paper, Deb and
Tiwari (2005) have proposed an unique approach for
solving different kinds of function optimization
problems often encountered in practice. They have
introduced the Omni Optimizer to the scientific
community and, as far as the author knows, it was
the first genetic algorithm that can automatically
adapt to solving those problems in a single opti-
mization run. This idea has immediately spread out
(see Coelho and Von Zuben, 2006, Klanac and
Jelovica, 2007, for example). Later, Deb and Tiwari
(2008) have published their extended Omni Opti-
mizer: “In this paper, for the first time, we suggest
an omni
-
optimizer, in which a single optimization
algorithm attempts to find one or more near
-
optimal
solutions for the following four types of optimization
problems [single
-
or multi
-
objective problems and
uni
-
optimal or multi
-
optima problems] in a single
simulation run of the algorithm ” (p. 1064).
THE CHEMNITZ HYBRID EVOLUTIONARY OPTIMIZATION SYSTEM
313
Let us present a brief outline of their proposed
Omni Optimizer. It is a generational genetic algo-
rithm that makes use of Latin
-
hypercube sampling
to generate its initial population. Simulated binary
crossover followed by polynomial mutation are
being used to produce two child individuals from
two parent individuals. Basically, the Omni Opti-
mizer works similar to the well
-
known fast and
elitist Non
-
dominated Sorting Genetic Algorithm
NSGA
-
II (see Deb, Pratap, Agarwal and Meyarivan,
2000, 2002) with some improvements resulting from
restricted selection and a more disruptive mutation
operator. Thus, excellent multi
-
objective optimi-
zation performance is out of question as confirmed
for the NSGA
-
II by many qualified studies.
However, if just one objective function is pre-
sent, the Omni Optimizer automatically “degener-
ates” (Deb and Tiwari really call it that way) and
adapts itself to solving the current single
-
objective
optimization problem efficiently. Here, a tournament
selection method is used with just two candidate
solutions taking part.
We refer to Deb and Tiwari (2005, 2008) them-
selves for a detailed description of the Omni Opti-
mizer and its extended version including pseudo
-
code.
4 COMPARISON
BETWEEN CHEOPS AND THE
OMNI OPTIMIZER
Definitely, the Omni Optimizer is a milestone in that
research topic, but does its extended version also
mark the end of the road? In this section we discuss
the single
-
objective optimization performance of the
(extended) Omni Optimizer comparing it with
CHEOPS re
-
running the original benchmark tests
now. Let us see whether simple CHEOPS in its basic
mode of operation can challenge the Omni
Optimizer successfully or not.
4.1 First Round of the Comparison:
Single
-
Objective Optimization
Results
To assess the efficiency of their proposed Omni Op-
timizer algorithm for single
-
objective optimization,
Deb and Tiwari (2005) present results of two bench-
mark functions only. Both functions are taken from
GA literature: the 20-variable Rastrigin function and
the 20-variable Schwefel function are well
-
known.
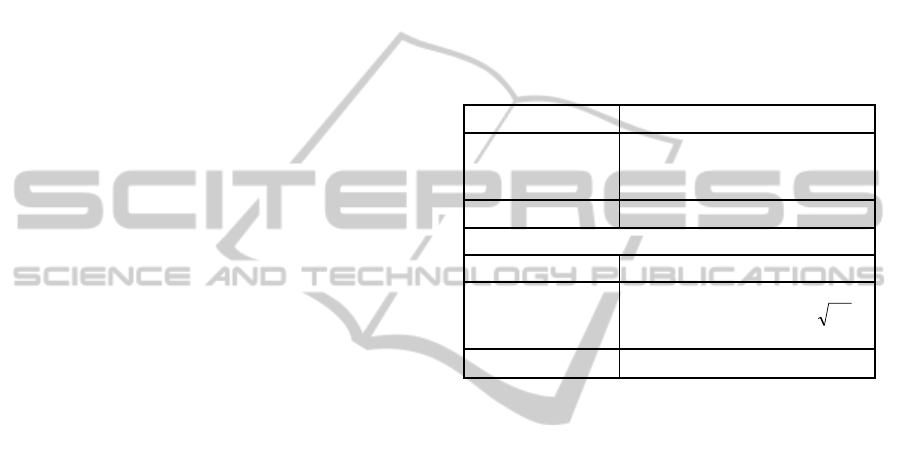
Table 1 reprints the functions’ definitions of Deb
and Tiwari. They claim that both functions have
many local minima, but there is only one global
minimum
f
*
= 0.0. Note, however, that this is a mis-
take for the Schwefel function: Using 418.9829 ⋅ n,
as Deb and Tiwari did, zero cannot be achieved as
the global minimum. Instead,
f
*
= 0.000012727566
2937252135648043992913093849 ⋅ n results for the
Schwefel function. Anyway, to be comparable with
their results we use those definitions of Deb and
Tiwari as reprinted in Table 1 throughout the present
paper.
Table 1: Definitions of the two test functions according to
Deb and Tiwari (2005, 2008).
Test function Rastrigin
=)(xf
R
r
(
)
∑
=
⋅π⋅−⋅+
n
i
ii
xx
1
2
))2(cos1(10
Variables’ range
−
10 ≤ x
i
≤ 10
Test function Schwefel
=
)(xf
S
r
∑
=
⋅−⋅
n
i
ii
xxn
1
||sin9829.418
Variables’ range
−
500 ≤ x
i
≤ 500
The population size
-
counting the number of
candidate solutions therein
-
is an essential control
parameter of any genetic algorithm to set a good
balance between exploitation and exploration. Thus,
optimization performance depends on the population
size, but Deb and Tiwari do not explain whether
they set it arbitrary or intentionally. Using a popu-
lation size of 20 individuals (for the 20-variable
Rastrigin function) respectively 50 individuals (for
the 20-variable Schwefel function), they execute
some optimization runs and present the best, median,
and worst number of objective function evaluations
required by their Omni Optimizer to achieve and
fall below
f
= 0.01. However, it is hardly compre-
hensible why such a rough approximation solely
determines their performance criterion? Any
advanced optimization tool should quickly achieve
and fall below that predefined threshold value,
because such an (in-)
accuracy of the approximation
is only worth a low grade 4 of merit according to
Schwefel (1975, 1995) himself. Afterwards,
convergence to the true global minimum is often a
difficult job and much more challenging, because it
requires very fine tuning of all the x
i
-
variables.
To assess the optimization performance of the
extended Omni Optimizer, both the Rastrigin func-
tion and the Schwefel function are again used by
ICEC 2010 - International Conference on Evolutionary Computation
314
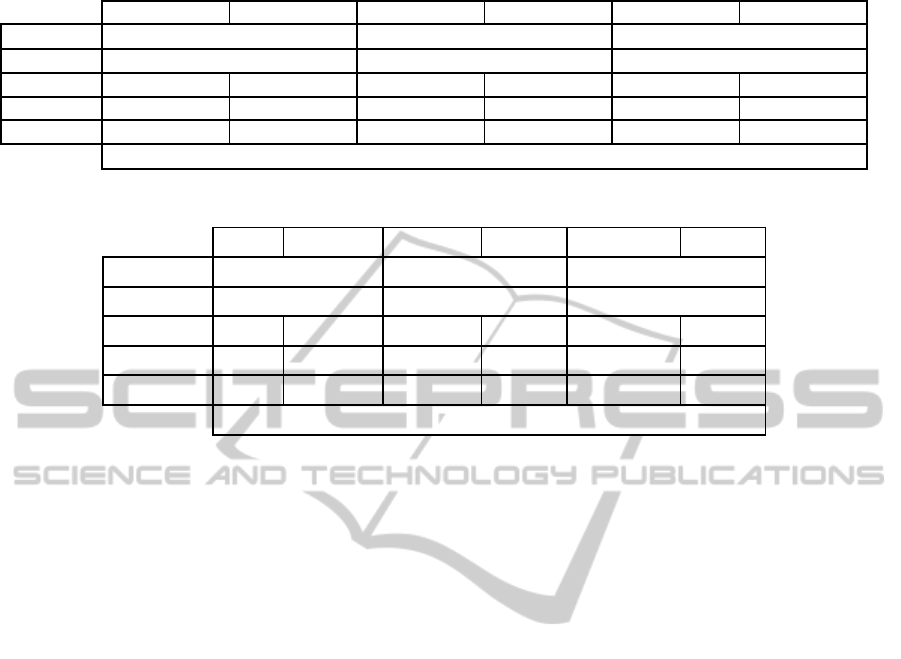
Table 2: Single
-
objective optimization results for the Rastrigin function.
Omni Opt CHEOPS Ext Omni Opt CHEOPS Ext Omni Opt CHEOPS
Test function
Rastrigin (n = 20 variables) Rastrigin (n
=
20 variables) Rastrigin (n = 10 variables)
Population size
20 40 40
Best run
19
260 2
369 24 520 2 570 8 120 1
588
Median
24
660 3
206 41 760 4 250 15 520 2
336
Worst run
29
120 5
419 106 440 6 730 53 480 3
117
objective function evaluations until f
<
0.01
Table 3: Single
-
objective optimization results for the Schwefel function.
Omni Opt CHEOPS Ext Omni Opt CHEOPS Ext Omni Opt CHEOPS
Test function Schwefel (n = 20 variables) Schwefel (n = 20 variables) Schwefel (n = 10 variables)
Population size 50 16 16
Best run 54
950 3
348 26
128 2
075 6
304 1
244
Median 69
650 4
290 36
272 3
235 11
360 1
814
Worst run 103
350 6
069 82
096 4
607 24
704 2
513
objective function evaluations until
f
< 0.01
Deb and Tiwari in their second paper (2008) as
single
-
objective, uni
-
optimal benchmark functions
(but now with 10 and 20 variables). They execute
some optimization runs
-
unlike before now with
different population size(s) without giving the
reason for that. Again, they present the best, median,
and worst number of objective function evaluations
required by the extended Omni Optimizer to achieve
and fall below
f
= 0.01 as predefined threshold
value.
Tables 2 and 3 compare the results of the Omni
Optimizer and its extended version with the results
of CHEOPS. Setting the same population size(s), the
(extended) Omni Optimizer is dramatically out-
performed, because CHEOPS is much more resolute
and faster when optimizing. Its worst runs required
only fractions of the objective function evaluations
of the best Omni Optimizer runs. Remember that
CHEOPS just uses random uniform sampling to
generate its initial population, whereas the Omni
Optimizer makes use of Latin
-
hypercube sampling
in all its runs. Due to such a jump start, the poor
performance of the Omni Optimizer and its extended
version is disappointing. Sometimes its runs have
really been long
-
term requiring a huge number of
objective function evaluations to achieve and fall
below that predefined threshold value.
Let us now compare the Ext Omni Opt columns
in Tables 2 and 3 with the corresponding Omni Opt
columns. On the one hand there is a better perform-
ance for the 20-variable Schwefel function; on the
other hand there is a much worse performance for
the 20-variable Rastrigin function. Thus, from that
comparison we cannot draw obvious conclusions
about the extended Omni Optimizer.
Let us also compare the CHEOPS columns in
Tables 2 and 3 for n = 20. CHEOPS runs more effi-
cient in smaller populations keeping only 20 rather
than 40 respectively 16 rather than 50 candidate
solutions. This also indicates that the 20-variable
Rastrigin function and the 20-variable Schwefel
function both are not too difficult to be minimized
until achieving and falling below that predefined
threshold value.
Setting the original population size of 20 indivi-
duals (for the 20-variable Rastrigin function) respec-
tively 50 individuals (for the 20-variable Schwefel
function), let us continue the CHEOPS runs beyond
that predefined threshold value until 19
260 respec-
tively 54
950 objective function evaluations at most.
Remember that the Omni Optimizer for the first time
ever has achieved
f
< 0.01 at those moments. In all
its runs, CHEOPS has approximated the true global
minimum with a small difference of less than 10
−9
not just at those moments, but thousands of objective
function evaluations earlier. According to the
original grades of merit by Schwefel (1975, 1995)
himself, this is worth a high grade 2. Note that for
the highest grade 1, the approximation to the true
global minimum has to be as precise as 10
−38
. How-
ever, we did not use such an extended floating
-
point
precision when compiling CHEOPS.
Please note that the Rastrigin function and the
Schwefel function are the only single
-
objective,
THE CHEMNITZ HYBRID EVOLUTIONARY OPTIMIZATION SYSTEM
315
uni
-
optimal benchmark functions used by Deb and
Tiwari (2005, 2008) to assess the optimization
performance of the (extended) Omni Optimizer. It
follows from the definitions in Table 1 that both
functions are separable in all of their variables. Each
function can be re
-
formulated by a sum
∑
=
=
n
i
ii
xfxf
1
)()(
r
of one
-
dimensional sub
-
functions. Thus, every x
i
-
variable may take its best value (without regard to
the others) to optimize by itself its contribution to
the desired objective function value. Usually, such
separable functions are of low or medium difficulty
for any advanced optimization tool, and they are
rarely coming across in real
-
world optimization
practice.
4.2 Second Round of the Comparison:
Further Single
-
Objective
Optimization Results
So far, optimization performance is assessed by how
many objective function evaluations are being
required until achieving and falling below a pre-
defined threshold value. Alternatively, how precise
does the optimization tool approximate the global
minimum within a limited number of objective
function evaluations?
Such tests are furthermore examined by Deb and
Tiwari only in their second paper (2008). They have
collected the objective function value of the best
candidate solution achieved within 10
000 objective
function evaluations at most, and then they have
averaged over 99 executed runs. Unfortunately, they
do not state the population size(s) used in the runs
when collecting their results of the extended Omni
Optimizer. Did it remain constant throughout all the
executed runs, or did it change from one test
function to another (as in the previous tests), or did it
vary for all the test functions with the number of
variables increasing (as not in the previous tests)?
Note that there are now 10 to 100 variables (at steps
of 10). We have opted for the second case in the
corresponding CHEOPS runs, and a population size
of 26 (for the Rastrigin function) respectively 24 (for
the Schwefel function) seem to work well for
n = 100. However, we did not execute numerous
pre
-
runs to find out the best population size(s) for
all n < 100 specifically. If we had done such tuning,
then we would have opted for the third case, because
the test functions are obviously more difficult to
minimize in high dimensions rather than in low
dimensions. Thus, as a rule of thumb, the population
size may also increase somewhat with increasing n
to achieve the very best optimization performance.
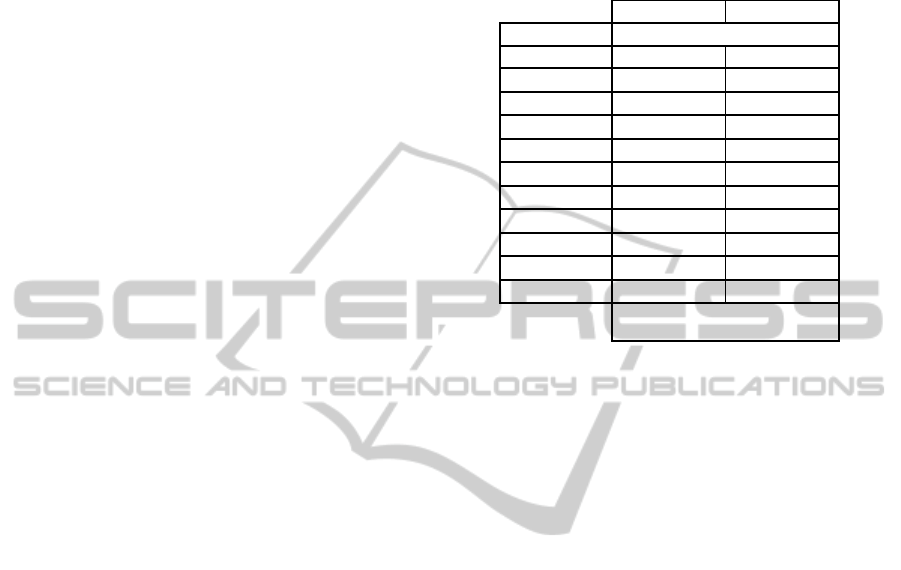
Table 4: Further single
-
objective optimization results for
the Rastrigin function.
Ext Omni Opt CHEOPS
Test function Rastrigin
Population size
?? 26
n = 10 variables
1.65
⋅
10
−3
1.071 ⋅ 10
−10
n = 20 variables
1.71
⋅
10
−2
4.398 ⋅ 10
−6
n = 30 variables
6.71
⋅
10
−2
6.884 ⋅ 10
−6
n = 40 variables
1.44
⋅
10
−1
3.520 ⋅ 10
−5
n = 50 variables
2.51
⋅
10
−1
3.833 ⋅ 10
−3
n = 60 variables
3.75
⋅
10
−1
2.144 ⋅ 10
−3
n = 70 variables
5.00
⋅
10
−1
2.979 ⋅ 10
−2
n = 80 variables
6.40
⋅
10
−1
6.672 ⋅ 10
−2
n = 90 variables
7.85
⋅
10
−1
4.090 ⋅ 10
−1
n = 100 variables
9.37
⋅
10
−1
2.195 ⋅ 10
−1
averaged
f
after 10
000 objective
function evaluations
Note, however, that Deb and Tiwari (2008) have
narrowed the variables’ range for the Rastrigin func-
tion by almost 50
% to −
5.12 ≤ x
i
≤ 5.12 now with-
out giving the reason for that. It was only recently
noticed by the author when writing this paper. That
is why CHEOPS did run with the original variables’
range −
10 ≤ x
i
≤ 10 for the Rastrigin function when
collecting the results in the above Table 4.
Remember that the definition of the Schwefel
function by Deb and Tiwari is used throughout this
paper (see Table 1). Thus, its global minimum is not
zero, but ~ 1.273 ⋅ 10
−5
⋅ n instead
-
which has really
been achieved for n = 10 and n = 20 variables in all
CHEOPS runs within 10
000 objective function
evaluations at most.
Furthermore, Deb and Tiwari (2008) use another ten
single
-
objective, uni
-
optimal benchmark functions
(with 10 to 100 variables at steps of 10) and present
results of how precise does the extended Omni
Optimizer approximate their global minimum within
10
000 objective function evaluations at most.
However, six out of them are again separable in all
of their variables. As mentioned before, such func-
tions are commonly inappropriate for assessing the
performance of optimization tools, because the so
-
called curse of dimensionality only strikes linearly
with increasing n, rather than exponentially. Thus,
their statement “that the omni
-
optimizer is ideally
suited for solving large
-
scale optimization problems
and its performance does not degrade significantly
by increasing the dimension of decision space” (p.
1074) is not sincerely justified. Rather than re
-
running further tests with only limited significance,
ICEC 2010 - International Conference on Evolutionary Computation
316
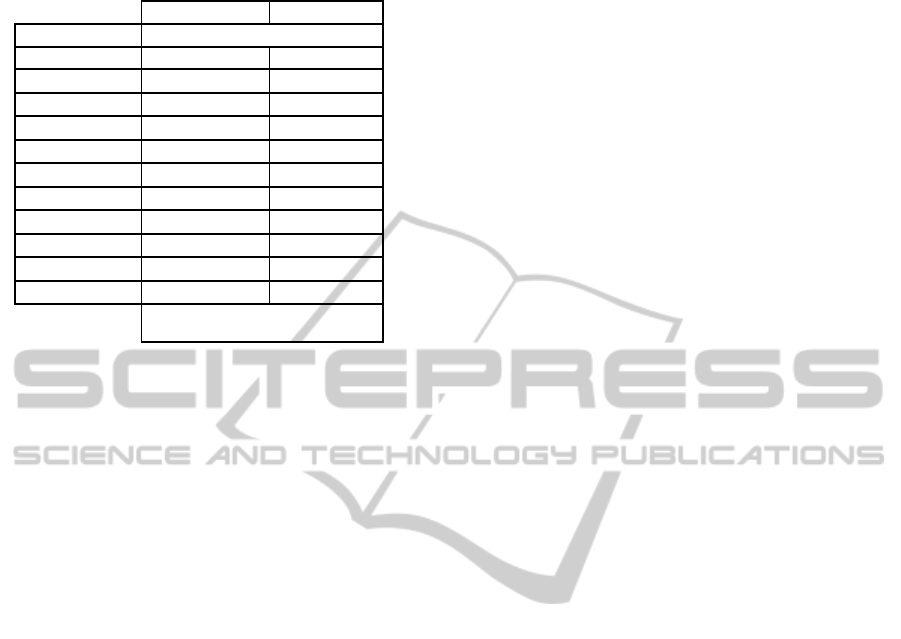
Table 5: Further single
-
objective optimization results for
the Schwefel function.
Ext Omni Opt CHEOPS
Test function Schwefel
Population size
?? 24
n = 10 variables
2.00
⋅
10
−2
1.273 ⋅ 10
−
4
n = 20 variables
7.98
⋅
10
−1
2.546 ⋅ 10
−
4
n = 30 variables
2.73
⋅
10
0
3.846 ⋅ 10
−
4
n = 40 variables
5.90
⋅
10
0
1.397 ⋅ 10
−
3
n = 50 variables
7.74
⋅
10
0
5.747 ⋅ 10
−
3
n = 60 variables
9.62
⋅
10
0
5.847 ⋅ 10
−
2
n = 70 variables
1.16
⋅
10
1
2.654 ⋅ 10
−
1
n = 80 variables
1.37
⋅
10
1
1.231 ⋅ 10
0
n = 90 variables
1.48
⋅
10
1
1.092 ⋅ 10
0
n = 100 variables
1.63
⋅
10
1
1.798 ⋅ 10
0
averaged f after 10
000 objective function
evaluations
the author refers to the very stringent benchmark
functions for single
-
objective optimization compiled
by Nieländer (2009), and to the excellent CHEOPS
results presented therein.
5 CHEOPS’ ADVANCED
MODES OF OPERATION
Remember that CHEOPS simultaneously uses many
different selection methods as well as genetic op-
erators in its basic optimization cycle. Hence, the
selective pressure varies and the genetic diversity
within the population is long
-
term maintained: Even
if the same parent individuals are being selected,
different child individuals will usually be produced
from them.
If some genetic operator turns out to be well
-
suited for the current optimization problem, because
it frequently or even regularly produces still better
child chromosomes, then it would make sense to ap-
ply it more often
-
likewise the selection methods
involved. This may speed up the evolution process
and
/
or increase robustness. Reflecting the evolution
of the population, CHEOPS builds up a dynamic pe-
digree and uses reinforcement learning (systematic
reward and penalty) to adjust the probabilities of
applying each genetic operator and each selection
method adaptively while the algorithm is running.
Note, unfortunately, that this does not suspend the
No Free Lunch theorem of Wolpert and Macready
(1995, p. 24): “It should be noted that this applies
even if one considers ‘adaptive’ search algorithms
which modify their search strategy based on pro-
perties of the population of
[
candidate solution
-
its
objective function value
]
pairs observed so far in
the search, and which perform this ‘adaptation’
without regard to any knowledge concerning salient
features of
f.”
Someone might argue that simultaneously using
many different selection methods as well as genetic
operators would not be enough against the risk of
inbreeding with steady state genetic algorithms. That
is why further counter
-
forces for advanced modes of
operation are implemented in CHEOPS:
After being selected for reproduction, a candi-
date solution may get older by automatically
making its objective function value a little bit
worse. Thus, any especially good, but maybe
just locally optimal candidate solution cannot
determine the evolution process forever.
Since all the selection methods are imple-
mented both ways, CHEOPS may occasionally
revert the current optimization direction
(maximization vs. minimization) for a short
time to find its way back from local optima not
being stuck therein forever.
Once in a while, CHEOPS can re
-
initialize
some good, or bad, or randomly picked candi-
date solutions thus stimulating the evolution
process again by bringing new individuals
(random uniform sampling within the search
space) into the population.
Multiple populations can evolve simultaneous-
ly in parallel with occasional exchange
/
migra-
tion of candidate solutions.
When separately or in combination activating
those advanced modes of operation and running,
unfortunately, CHEOPS’ optimization performance
is difficult to analyze both theoretically as well as
systematically. There are many control parameters to
set
-
up initially, but no obvious relationship between
parametrization and current optimization per-
formance could be established yet. General rules for
automatic optimal, at least reasonable set
-
up would
be nice to have to avoid numerous pre
-
runs prior to
actual optimization. Thus, there is a lot of on
-
going
research on each of these advancements and their
particular usefulness.
6 FUTURE WORK: SOLVING
MULTI
-
OBJECTIVE
PROBLEMS
Many mathematical, techn(olog)ical, or economic
optimization problems from scientific, industrial,
and commercial practice do not involve just one
objective function. Instead, several objectives have
THE CHEMNITZ HYBRID EVOLUTIONARY OPTIMIZATION SYSTEM
317

to be fulfilled simultaneously. Generally, these
objectives will be independent of each other and
conflicting as well as incommensurable with some
of them to be maximized and the other(s) to be
minimized. However, in a Cost Benefit Analysis for
example, minimum expenses cannot yield maximum
profits due to economic reasons. Hence, a unique
and perfect solution meeting all the objectives’
optimal values does hardly exist. Instead, improve-
ment in one objective can only be achieved by some
other objective’s deterioration. That is why the
requirements to the optimization tools and their
search and solution procedures are more challenging
for multi
-
objective optimization compared to usual
single
-
objective optimization.
6.1 Appropriate Selection Methods
In single
-
objective optimization, all candidate solu-
tions can be compared and sorted according to their
objective function value. The selection methods of
evolutionary algorithms rely on such a comparison
and ranking. In multi
-
objective optimization, how-
ever, two candidate solutions are incomparable if the
first is better than the second for some objective(s)
whereas the second is better than the first for another
objective(s). Thus, the two candidate solutions do
not dominate each other. Consequently, appropriate
selection methods are particularly necessary for an
evolutionary algorithm not only to handle single
-
objective optimization problems, but also to tackle
multi
-
objective optimization problems and to solve
them successfully in a single run. The usual weight-
ed sum approach might not be adequate.
As mentioned before, a unique and perfect solu-
tion meeting all the objectives’ optimal values does
hardly exist. Instead, the optimization tool should
output lots of such candidate solutions that cannot be
dominated by any other(s), thus spanning the trade
-
off surface for the current optimization problem in
the objective space. That is known as Pareto
-
optimality, and according to that Pareto ranking of
all candidate solutions within the population is
commonly used by the selection methods of multi
-
objective evolutionary algorithms. More than twenty
years ago, Goldberg (1989) outlined the basic idea
which is implemented in the Omni Optimizer, too:
All non
-
dominated candidate solutions within the
current population are identified, top
-
ranked and
temporarily suspended. Thereafter, all non
-
dominated candidate solutions within the remaining
population are identified, next
-
ranked and
temporarily suspended. This process continues until
the entire population is ranked. Finally, selection
methods can be applied based on that ranking. An-
other population ranking can be defined by counting
how many other individuals each candidate solution
dominates and
/
or is dominated by within the current
population.
According to Hughes (2005), however,
optimization tools using selection methods based on
Pareto ranking to sort the population will be very
effective only for optimization problems with few
objectives. Coello Coello, Lamont and Van Veld-
huizen (2007) also explain that Pareto ranking
becomes inappropriate when dealing with a large
number of objectives. For such optimization
problems, all the individuals within the population
will soon become non
-
dominated and selective
pressure decreases. That is why the CHEOPS
selection methods for multi
-
objective optimization
should not rely on Pareto ranking of all the candidate
solutions with-in the population. Remember that
they have to be implemented both ways, selecting
preferably good candidate solutions to reproduce
and rather bad ones to die.
6.2 Elite Population Archiving
Strategies
In single
-
objective optimization, elitism was simply
keeping track of the best candidate solution(s) found
so far while the evolutionary algorithm is running.
However, in multi
-
objective optimization all such
candidate solutions should be kept that are not
dominated by any other(s). That is why a separate
elite population must be reviewed continually and
updated accordingly. Eventually it may contain hun-
dreds even thousands of non
-
dominated candidate
solutions being as close as possible to the true trade
-
off surface for the current optimization problem.
Hence, some archiving strategy would make
sense to implement in CHEOPS not keeping all but
only a limited number of such candidate solutions.
Of course, they should cover the trade
-
off surface as
widespread as possible within the objective space.
This can be achieved by maximizing the inner
distances between the candidate solutions kept in the
elite population, or by maximizing the area
/
(hyper-
)
volume they dominate. According to Corne and
Knowles (2003), however, this essentially leads to
Free Lunch results for archived multi
-
objective
optimization.
ICEC 2010 - International Conference on Evolutionary Computation
318

7 SUMMARY
AND CONCLUSIONS
This paper has introduced the Chemnitz Hybrid
Evolutionary Optimization System to the scientific
community. Being a non
-
standard genetic algorithm
framework, CHEOPS allows simple as well as ad-
vanced modes of operation.
In the present paper we have restricted ourselves
to single
-
objective optimization, because CHEOPS
is still under construction. It will be enhanced to
solve multi
-
objective problems as well. Thus, an-
other paper might take up the comparison in the near
future. Surprisingly, steady state genetic algorithms
like CHEOPS are rather unusual in multi
-
objective
optimization practice
-
without any justification and
perhaps unaware of their main advantage. The
proposed enhancement to solve multi
-
objective
problems simply by appropriate selection methods
and elite population archiving strategies is indeed
quite straightforward. Furthermore, CHEOPS does
not need any other modifications such as variable
space and objective space crowding, or niche and
speciation methods.
In their pioneering papers, Deb and Tiwari
(2005, 2008) have argued that multi
-
objective,
multi
-
optima optimization problems are the most
generic ones. They have concluded that, if designed
carefully, an algorithm capable of solving such
problems should also solve single
-
objective and
/
or
uni
-
optimal problems in a straightforward, so
-
called
“degenerated” manner. However, due to the
disappointment of their (extended) Omni Optimizer
with regard to its single
-
objective optimization
results as assessed in the present paper, a high
-
performance genetic algorithm well
-
suited for solv-
ing both single
-
and multi
-
objective optimization
problems is still a matter of serious research. It
might be acknowledged by the scientific community
in the near future and should find increasing use in
real
-
world optimization practice, too.
Let us finally think about that reasoning of Deb
and Tiwari
in more detail. In multi
-
objective
optimization, the optimization tool should output
lots of such candidate solutions that cannot be
dominated by any other(s), thus spanning the trade
-
off surface for the current optimization problem in
the objective space. That is known as Pareto
-
optimality, but being a pareto
-
optimal candidate
solution does not require getting close to extreme in
one or more objective function(s). Unlike, getting
close to extreme is what single
-
objective
optimization is all about! In multi
-
objective
optimization, there are usually infinitely many
pareto
-
optimal candidate solutions
-
in single
-
objective optimization, the optimization tool has to
push the objective function to its very extreme to
find the true, one and only global optimum. Thus, it
is the author’s opinion, that single
-
and multi
-
objective optimization are two different jobs, and
you cannot perform well in one job just by “de-
generation” of the skills you have trained for and
practiced in another job.
REFERENCES
Coelho, Guilherme P.; Von Zuben, Fernando J. (2006).
Omni
-
aiNet: An Immune
-
Inspired Approach for
Omni Optimization. In Proceedings of the Fifth
International Conference on Artificial Immune
Systems ICARIS’2006 (pp. 294
-
308). Berlin:
Springer LNCS 4163.
Coello Coello, Carlos A.; Lamont, Gary B.; Van Veld-
huizen, David A. (2007). Evolutionary Algorithms for
Solving Multi
-
Objective Problems (Second Edition).
New York: Springer.
Corne, David W.; Knowles, Joshua D. (2003). Some
Multiobjective Optimizers are Better than Others. In
Proceedings of the 2003 IEEE Congress on Evolution-
ary Computation CEC’2003 (pp. 2506
-
2512). Pis-
cataway: IEEE Service Center.
Deb, Kalyanmoy; Pratap, Amrit; Agarwal, Sameer; Me-
yarivan, Thirunavukkarasu (2000). A Fast and Elitist
Multi
-
Objective Genetic Algorithm: NSGA
-
II. Indian
Institute of Technology Kanpur : KanGAL Report No.
200001.
Deb, Kalyanmoy; Pratap, Amrit; Agarwal, Sameer; Me-
yarivan, Thirunavukkarasu (2002). A Fast and Elitist
Multiobjective Genetic Algorithm: NSGA
-
II. IEEE
Transactions on Evolutionary Computation, 6
(2), pp.
182
-
197.
Deb, Kalyanmoy; Tiwari, Santosh (2005). Omni
-
Optimi-
zer: A Procedure for Single and Multi
-
Objective Opti-
mization. In Proceedings of the Third International
Conference on Evolutionary Multi
-
Criterion
Optimization EMO’2005 (pp. 47
-
61). Berlin:
Springer LNCS 3410.
Deb, Kalyanmoy; Tiwari, Santosh (2008). Omni
-
Optimi-
zer: A Generic Evolutionary Algorithm for Single and
Multi
-
Objective Optimization. European Journal of
Operational Research, 185
(3), 2008, 1062
-
1087.
De Jong, Kenneth A. (2006). Evolutionary Computation
-
A Unified Approach. Cambridge : MIT Press.
Goldberg, David E. (1989). Genetic Algorithms in Search,
Optimization, and Machine Learning. Boston: Addi-
son
-
Wesley.
Hughes, Evan J. (2005). Evolutionary Many
-
Objective
Optimisation: Many Once or One Many? In
Proceedings of the 2005 IEEE Congress on
Evolutionary Computation CEC’2005 (pp. 222
-
227).
Piscataway: IEEE Service Center.
THE CHEMNITZ HYBRID EVOLUTIONARY OPTIMIZATION SYSTEM
319

Klanac, Alan; Jelovica, Jasmin (2007). A Concept of
Omni
-
Optimization for Ship Structural Design. In
Advancements in Marine Structures
-
Proceedings of
the First International Conference on Marine Struc-
tures MARSTRUCT’2007 (pp. 473
-
481). London:
Taylor
&
Francis.
Nieländer, Ulf (2009). CHEOPS: Das Chemnitzer hybrid
-
evolutionäre Optimierungssystem. Chemnitz Univer-
sity of Technology: Eng.
D. Thesis. http://archiv.tu-
chemnitz.de/pub/ 2009/0100/data/UlfNielaender.pdf
Schwefel, Hans
-
P. (1975). Evolutionsstrategie und nume-
rische Optimierung. Technical University of Berlin:
Eng.
D. Thesis.
Schwefel, Hans
-
P. (1995). Evolution and Optimum
Seeking. New York: Wiley.
Wolpert,
David
H.;
Macready,
William
G.
(1995).
No
Free
Lunch Theorems for Search. Santa Fe Institute:
Working Paper 95-02-010.
ICEC 2010 - International Conference on Evolutionary Computation
320
