
TRAIN TIMETABLE GENERATION USING GENETIC
ALGORITHMS
C. J. Hinde, M. S. Withall, I. W. Phillips
Department of Computer Science, Loughborough University, Loughborough, U.K.
T. W. Jackson
Department of Information Science, Loughborough University, Loughborough, U.K.
S. Brown, R. Watson
RWA Rail, RWA-Rail, Epinal Way, Loughborough, Leicestershire, U.K.
Keywords:
Railway timetabling, Evolutionary systems, Multiobjective optimisation.
Abstract:
The scheduling of railway trains has been a research problem for many years. Many of the choices required are
not known a priori and require exploration of the problem to determine them. A modular Genetic system was
designedmake the evaluation function and preparation of the timetable tractable. The Genetic system consists
of a Genome, split into Chromosomes so the extra choices that become known throughout the evolution can be
added to the Chromosomes. A weighted fitness function and a multiobjective non-dominated fitness function
were tried, and then partial objective ranking was added. The system has tackled a mixture of problems has
produced promising results.
1 INTRODUCTION
Producing railway timetables has long been a dif-
ficult problem and along with many scheduling
and timetabling problems is NP Complete (Ullman,
1975). There are many aspects to the problem and
typically they have been solvedas optimised subprob-
lems. Actual rail timetables take of the order of 18
months and many railway planners.
Train timetabling, which determines leaving and
arrival times along with other factors, has some in-
teresting characteristics. The constraints may deter-
mine that some trains will leave a station at a fixed
time. The duration of journeys between Tiplocs (tim-
ing point locations — places on the rail network such
as stations and junctions) will be specified by a doc-
ument known as the “Rules of the Plan”, (ROTP).
These are exactly what they state and determine many
aspects of the emerging plan. For example it will
take 11 minutes for a high speed train to move from
Loughborough to Leicester.
There are decisions to make about train move-
ments, such as which platform to arrive at where there
are many possible platforms. There are also decisions
that are not known at the start of the planning process
and arise as a result of exploring the space of possible
plans. An example of this is a train leaving a station at
a set time and catching up with an earlier slower train,
this is known as a “headway clash”. There is now a
choice whether to delay the start of the faster train so
it does not interfere with the slower train, or delay the
train en-route.
Requirements
Platform
Allocation
Stock
Timetable
Rail Plan
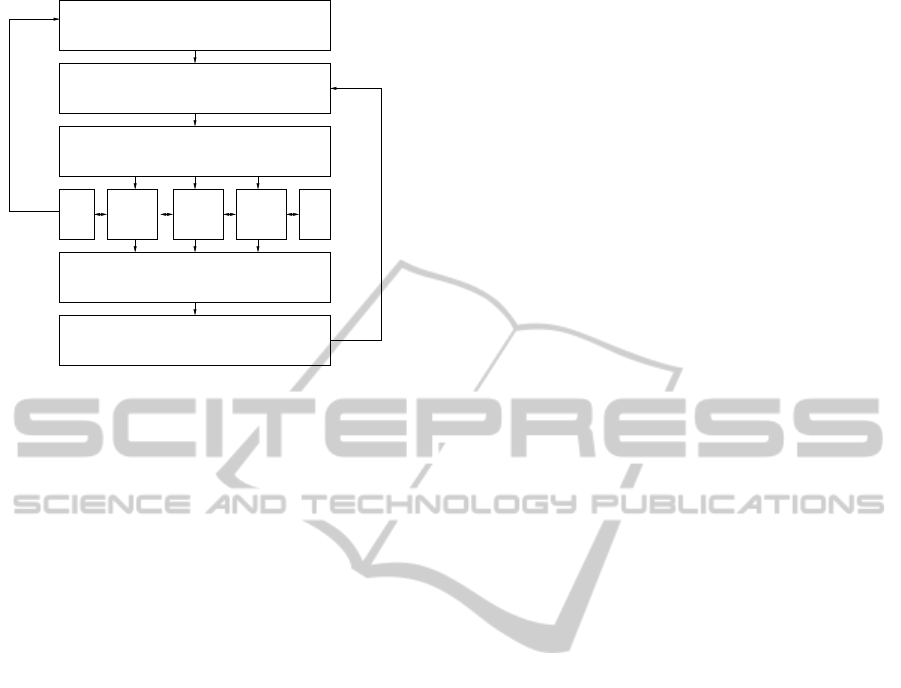
Figure 1: The basic timetabling system. This also shows
that the subproblems are connected and cannot be optimised
separately. Platform allocation cannot be performed until
the train arrival and departure times are known.
170
J. Hinde C., S. Withall M., W. Phillips I., W. Jackson T., Brown S. and Watson R..
TRAIN TIMETABLE GENERATION USING GENETIC ALGORITHMS.
DOI: 10.5220/0003074801700175
In Proceedings of the International Conference on Evolutionary Computation (ICEC-2010), pages 170-175
ISBN: 978-989-8425-31-7
Copyright
c
2010 SCITEPRESS (Science and Technology Publications, Lda.)

2 BASIC SYSTEM
The problem of railway plan generation includes sev-
eral subproblems. Typically these have been solved
in order with feedback taking place if a subsequent
subproblem cannot be solved. This is due to the size
of the problem and not to any intrinsic property of
it. Figure 1 illustrates this, the three subproblems de-
noted are not exhaustive.
2.1 Subproblems
There are several subsystems. In order to test the
interdependency mechanisms and to allow a single
Genome to control the details of any plan produced.
The three illustrated involve:
• Timetable delivers the times of arrival and de-
parture, which parts of the track are to be used
and which platforms each train on each journey
at each station shall use. The tracks and platforms
used are determined by the relevant Chromosome.
• Stock Allocation delivers the particular arrange-
ment of rolling stock that make up a particular
train.
• Platform subsystem checks that there are no plat-
form clashes and that each platform used is able to
service the trains that arrive to it and depart from
it. The platform subsystem takes some of its input
from the Timetable subsystem.
Each subproblem has its own requirements either
from the specified requirements of the plan or be-
cause of the output from another subproblem further
specifies the problem. For example, it is not possi-
ble to evaluate whether a platform clash exists until
the arrival and departure times of the various trains
have been determined. All the journeys required are
known at the outset so it is possible to determine a
stock allocation before timetabling, however it is not
possible to determine a good stock allocation with-
out knowledge of the train sequences and times. The
modules are connected in 2 main ways, they depend
on one another for some of their parameters; typically
a timetable will be formed, followed by allocation of
Rolling Stock and then a Crew will be allocated to
the train. However, a change in the Timetable will af-
fect which Rolling Stock are available, and also which
Crews are available.
Early work on our timetabling problem tackled
platform allocation in a major station using real ar-
rival times and a specified platform resource (Clarke
et al., 2009). Glasgow Central has nearly 1000 trains
a day and the system resolved the allocation problem
in under 30 seconds on a fairly modest PC.
This work was encouragingand similar exploratory
work on timetabling after attending a course on rail
timetabling was also encouraging. This resulted in
modules that could address single problems such as
the timetabling and platform allocation separately but
not together. The attraction of being able to build the
plan segments using modules which could be sepa-
rately included, omitted, extended or modified was
powerful. At this stage it was decided to separate the
modules so that this was possible.
Having produced a timetabling module that did
not encompass any Artificial Intelligence but which
just loaded the trains into a schedule, plus a platform
allocation module that applied a Genetic Algorithm
to the problem, the next step was to develop an over-
all architecture which would support the whole prob-
lem. The idea is that the problem specific modules
would have little or no intelligence but would be pa-
rameterised by the requirements file and a parame-
ters file generated by the AI module. The require-
ments file would specify such things as “Train 1F01
leaves Sheffield at 10.00”, which would be part of the
fixed requirements. The parameters would specify
that “Train 1F01 leaves Sheffield from platform 1”;
and would not be part of the fixed requirements but
would be decided by the AI module.
At this point an optimisation framework exists,
based currently on a GA that mixes fixed require-
ments with choices based on a Genome so the plan
generation software responsible for allocating times,
platforms and rolling stock would become deter-
mined. All that would then be required would be to
feedback a utility measure so the AI module can im-
prove its decisions, Figure 2.
There are several difficulties with this, while many
of the decisions about the timetable are fixed and so
may not be changed by the AI system, there are deci-
sions that are known a priori such as which platform a
train is to arrive on. It is relatively straightforward to
determine which decisions are required at this level.
However, it is possible that a train may leave at a time
that results in it catching up an earlier slower train and
as such violates the restrictions that determine howfar
apart trains on the same line must be; this is known as
Headway. A problem arises where a train that can
leave at any time, tries to leave at a time that results in
a headway clash. There are two choices, either change
the time the following train leaves, or change the time
the followed train leaves. So decisions are required
from the AI system that are not known a priori. The
modules therefore have to feed back a list of options
for the AI module to resolve, see Figure 2.
A simple example of this feedback is shown in
Figure 3, which is the initial choices file, with Fig-
TRAIN TIMETABLE GENERATION USING GENETIC ALGORITHMS
171
New Choices
Platform
Allocation
Stock
Timetable
Rail Plan
Evaluation
AI Module
Requirements and Parameters
Feedback
Choices
Figure 2: The modules feed back new choices required to
resolve problems.
8 /* number of Genes */
10 /* number of choices for this Gene */
startingtime_p(‘4B01’,
540
545
:
625
).
:
2
track_p(‘2C03’,warob_jn,down,llanbart,
ufl
sl
).
Figure 3: A fragment of the initial choices file containing
the patterns to be fed to the timetabler based on the values
of the Genes.
ure 4 shows a typical fragment of a parameter file
aimed at the timetabling module. The timetabling
module is written in prolog and the control pro-
grams including the Genetic system are written in C.
whereas Figure 5 shows a fragment of the choices file
after a few generations.
startingtime_p(‘4B01’,600).
dwelltime_p(‘1F01’,staffrayner,2).
platform_p(‘1F01’,down,dfl,watergalley,1).
:
track_p(‘2C02’,llanbart_n_jn,up,llanbart,sl).
:
Figure 4: A fragment of the initial parameters file contain-
ing the actual values fed to the timetabler based on the val-
ues of the Genes.
14 /* extended from 8 Genes to 14 */
:
2
delaystartingtime_p(‘2C01’,
0
3.5
).
:
Figure 5: A fragment of the final choices file containing the
patterns to be fed to the timetabler based on the values of
the Genes. Notice that there are now 14 Genes available to
control the timetabler.
startingtime_p(‘4B01’,600).
:
delaystartingtime_p(‘2C01’,0).
:
Figure 6: A fragment of the final parameter file with the
choices resolved.
Figure 4 shows the parameter file after 1 gener-
ation, it contains no added Genes but the values are
in fact reasonable. Each Genome will have its own
parameter file and will return a fitness vector appro-
priately based on the performance of the plan.
After a few generations the system has found
several possible delays required due to headway
clashes. Some of these headway clashes are resolv-
able through other means. The potential delay to
‘1F03’ is due to the freight train ‘4B01’ leaving at an
inappropriate time and would not normally be con-
sidered by a human timetabler; however the system
has tried to resolve this difficulty and come to the
conclusion that it was not necessary as ‘4B01’ could
be scheduled to leave at a different time. Although
this aspect of the problem was known by the hu-
man timetablers it may occur in any other timetabling
problem and so should be considered.
Figure 6 is the final parameter file with the choices
resolved. The main “troublemaker” is the time of de-
parture of ‘4B01’, which is a freight train. Unhelp-
ful departure times have led the timetabler to request
possible delays to several trains, however the only de-
lay actually necessary if the freight train leaves at 600
(10.00AM) is a delay to ‘2C02’.
3 IMPLEMENTATION DETAILS
The system has been implemented in a variety of lan-
guages; whichever language seemed appropriate and
which made implementation as fast and easy as pos-
sible consistent with obtaining a correct working sys-
tem. The main AI system, a Chromosome based Ge-
ICEC 2010 - International Conference on Evolutionary Computation
172

netic Algorithm, was written in ‘C’, because one of
the main tasks is to control the execution of the sub-
programs and other services. The Timetable and Plat-
form subsystems are written in prolog.
4 EVOLUTIONARY SYSTEMS
The evolutionary system is responsible for making the
choices in the timetabling system. A series of strate-
gies were used in the experiments delivering various
benefits. The structure and characteristics of the prob-
lem have influenced the design of the evolutionary
system as the Chromosomes need to be extensible,
and to influence different parts of the problem while
being part of a whole solution.
4.1 Genome Structure
Each Genome has as many Chromosomes as there are
subproblems. Each Chromosome may be any length
depending on the subproblem addressed, as each sub-
problem may require more decisions to be made the
separation into Chromosomes allows this to happen
without destroying the interpretation of that Chromo-
some’s Genes. The choices file determines how each
Gene value is to be interpreted and determines the
structure of the eventual parameters file that controls
the connected subsystem.
4.1.1 Reproduction
Crossover is implemented using Uniform
Crossover (Syswerda, 1989) and parent selec-
tion is by tournament. As Chromosomes may be
different lengths, Uniform Crossover is performed up
to the length of the shortest Chromosome followed by
copying up to the length of the longest Chromosome.
The choices file for that Chromosome has a maxi-
mum limit and the remainder of the Chromosome
is selected randomly. An alternative strategy would
be to terminate the child Chromosome, however this
would result in no extensions to the Chromosome.
Parents who are fitter than offspring are kept to their
length and survive to the next generation. From a
population of N parents delivering N offspring the
new offspring are evaluated and the fittest of the 2N
contenders are kept for the next generation.
4.2 Execution
Each member of the Genome population has a sub-
directory containing a run time execution image of
the relevant subproblem. The main control program
writes the parameter file based on the choices file
and the value of the Gene to the relevant directory
and initiates the appropriate sub program. There is
an order in which these subprograms need to be exe-
cuted, for example the Platform subprogram does not
have enough information until the Timetable has been
formed. The control program is aware of this order-
ing and will not initiate a subprogram until all its pre-
decessors have completed and provided the requisite
additional parameters needed.
After all the subprograms have executed in the
correct sequence, passing parameters between them-
selves as appropriate, the new required choices are
collected together and added to the choices file. This
is not quite straightforward as the choices may have
already been added, and furthermore there may be
additional options to an earlier choice. For example,
there may be a headway clash between two trains, re-
quiring the faster train to be delayed by 3 minutes.
Once all decisions have been made this delay may
be unnecessary so two options, 0 and 3 minutes, are
given to the Genetic system. After the 3 minute delay
is imposed, the faster train may catch up the slower
further on; requiring a further delay, say 2 minutes.
So the options would now be 0, 3 and 5 minutes.
5 FITNESS ASSESSMENT
These experiments are based on a tutorial example,
used in the training of real train planners and designed
to illustrate all major aspects of railway planning. The
example problem has several passenger trains and fi-
nally a freight train that can leave at any time but does
not stop until it reaches its destination. All that is
required is that one Gene has sufficient options that
it can represent all the potential departure times of
the freight train. The major concern in this project
is scalability and so times are relevant. As the even-
tual users of the system will not be experts in tuning
evolutionary systems guaranteed convergence is also
important. The experiments were run on a Macin-
tosh MacPro dual 3.2GHz quad core machine running
OSX 10.6. The software was written in a mixture of C
and SWIPL Prolog. The software was also organised
to be executed concurrently, as described above. All
experiments were conducted with 7 different random
number seeds and the results shown are the medians
of those runs. The overall measures for the strategies
are averages of the medians. All experiments were
terminated after generation 1000, starting at genera-
tion 0, as having not converged, hence the values of
1001 generations on some entries.
The fitness strategies tested were as follows:
TRAIN TIMETABLE GENERATION USING GENETIC ALGORITHMS
173
• A weighted sum of the fitness values.
• A fitness vector using non-dominated selection.
• A layered ranked fitness vector using non-
dominated selection.
5.1 Weighted Sum
In order to establish a base line for the tests a simple
weighted sum of the fitness values was used. As ex-
pected the system worked reasonably well, converg-
ing in a few seconds.
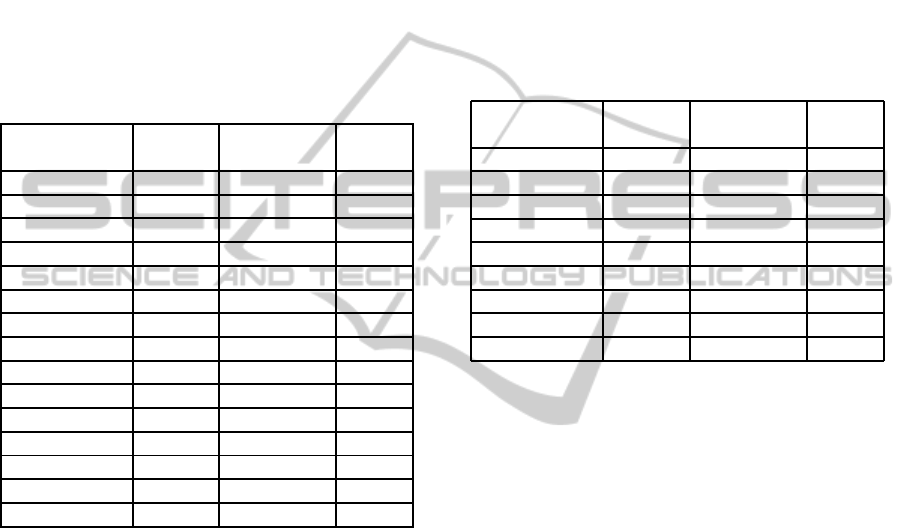
Table 1: The results of some experiments on population size
with a weighted sum fitness vector.
Population Time Generations Fitness
Seconds Tests
5 77 489 2445
10 112 558 5580
20 38 135 2700
30 18 45 1350
40 12 23 920
50 13 21 1050
60 52 71 4260
70 15 17 1190
80 19 19 1520
90 16 15 1350
100 15 13 1300
110 24 19 2090
120 19 13 1560
Average 32.9 111 2101
Average > 40 21.6 23.5 1790
5.1.1 Problems and Analysis
The system as described executes reasonably quickly
but is directed towards a weighted sum of fitness val-
ues that does not capture the requirements adequately.
The major problem is that with a weighted fitness
function there is a point where not delaying a train
results in a headway clash; and if the sum of de-
lays is sufficient to match the weighted headway clash
we exchange a late train for a severely damaged one.
Typically signalling would just delay the train to avoid
a crash, but it is unwise to plan for a headway clash.
5.2 Multi Objective Non-dominated
Fitness
Deb’s (Deb et al., 2002) Non-Dominated Genetic al-
gorithm potentially avoids the problem of weighting
the undesirability of a headway clash against delayed
trains. The fitness values used in these experiments
were based on Train delays, Headway Clashes and
Platform Clashes. The selection was based on non-
dominated fitness vectors, duplicate solutions and fi-
nally, to resolve potential ambiguities, the number of
other individuals in the population that were domi-
nated by an individual. The fittest individuals would
be non dominated, non duplicates that dominated
other individuals. One individual in a set of dupli-
cates was marked as a nonduplicate.
One benefit of this is that a set of pareto optimal
solutions are generated, see (Deb et al., 2005).
Table 2: The results of some experiments on population size
with a multi-objective non-dominated fitness vector.
Population Time Generations Fitness
Seconds Tests
5 160 1001 5005
10 206 1001 10010
20 5 18 360
30 8 21 630
40 486 1001 40040
50 9 15 750
... .. . .. . .. .
Average 76 244 5128
Average > 40 15 15 1328
5.2.1 Problems and Analysis
This technique worked as far as described above.
However, for a station with several platforms, each
having equal access to the network, while there may
be only one distinct solution to the platform alloca-
tion the numbering of the platforms does not affect
the solution so given N platforms there are N! equiv-
alent solutions. The first way in which this manifests
itself is that one solution is found very quickly which
has no delays but several headway clashes, there are
many that are equivalent but not duplicates and this
quickly exhausts the population.
A solution that delays a train and eliminates the
headway clash would emerge as another pareto opti-
mal solution, however the headway clashes are not al-
ways eliminated in 1 generation and this solution gets
lost. Table 3 shows some of the times and generation
at which a solution appeared.
The situation that arises is that a headway clash is
detected requiring an X minutes delay to be applied.
If this is applied it can mean that although that head-
way clash is eliminated, the following train is still
travelling faster than the leading train and catches it
later on. Another headway clash is generated which
leaves the potentially optimal solution dominated by
the solutions with no delays. A much larger popu-
lation size in our test scenario allows the solution to
ICEC 2010 - International Conference on Evolutionary Computation
174
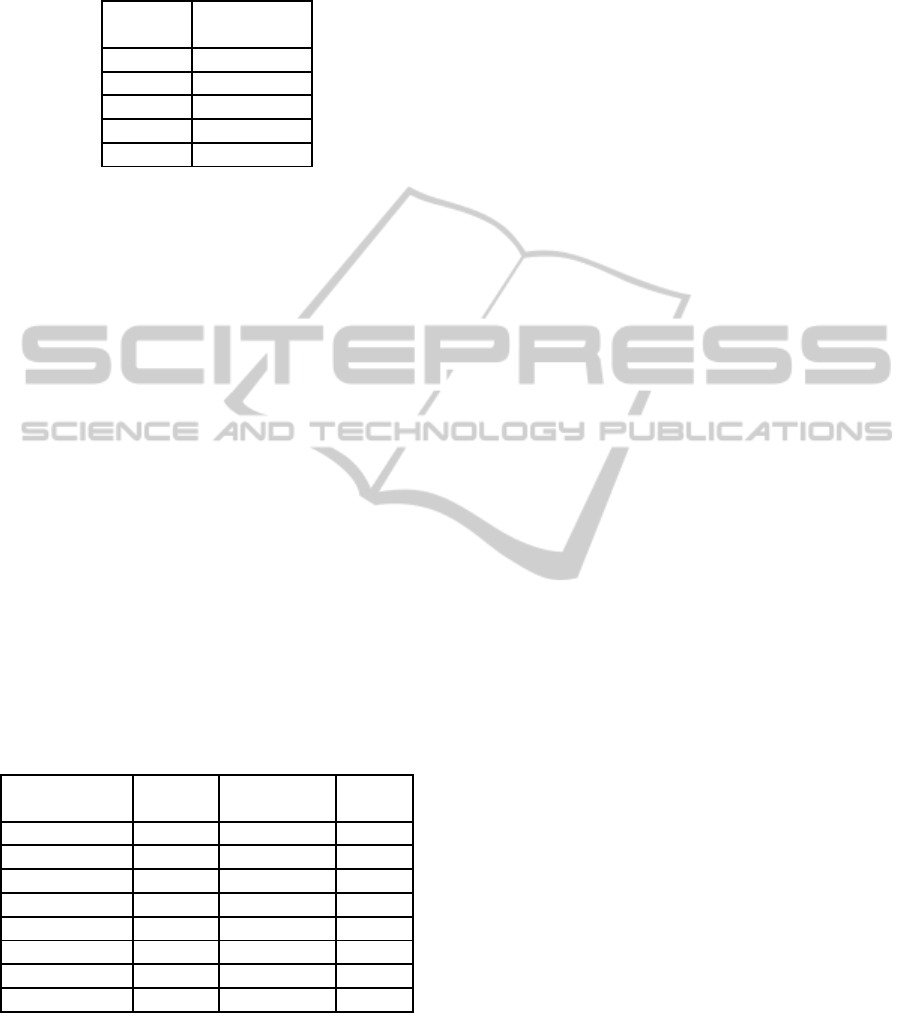
Table 3: Showing how the solution, once in the system, gets
lost in subsequent generations. The solution appears at the
nominated generation but then disappears.
Time Generations
Seconds
25 205
28 221
38 305
39 310
.. . ...
emerge, but smaller populations become locked into
a local minimum, see Table 2.
So the non-dominated multi-objective fitness
function has some instabilities but once the popula-
tion size is sufficient to avoid those it is much faster.
The instabilities in the system are undesirable and so
this solution does not meet the needs of the problem.
5.3 Ranked Multi Objective
Non-dominated Fitness
This solution was the fastest and gave the most sat-
isfactory set of solutions by ranking the fitness func-
tions, also reflecting the actual requirements of the so-
lution. We care about delays, but not at the expense of
a headway clash. Clashes are very important and so
we search for solutions where the optimum is based
on the important characteristics, and within those the
less important characteristics. Our tests placed “head-
way clashes” and “platform clashes” at rank 1 and
“train delays” at rank 2.
Table 4: The results of some experiments on population size
using a ranked multi-objective non-dominated fitness vec-
tor.
Population Time Generations Fitness
Seconds Tests
10 10 64 640
20 8 30 600
30 10 26 780
40 8 17 680
50 14 23 1150
.. . ... ... ...
Average 17.0 43.7 1341
Average > 40 19.1 19.6 1670
5.3.1 Problems and Analysis
This system is fast, the set of solutions are pareto op-
timal and the instabilities are eliminated, see Table 4.
6 CONCLUSIONS
The paper has described a Genetic System for
timetabling railway trains. The problem is such that
the Genome was split into Chromosomes to allow
more Genes to be added for each subproblem. The
system runs the subproblems in parallel on as many
processors as are available and runs quickly. The re-
sults are the optimum timetables for the problems and
constraints given and the requirements are designed to
cover most of the issues that occur in real timetabling.
The architecture is extensible and can support various
different problem breakdowns as appropriate. The
system has moved from a simple weighted sum of
the fitness functions, through a non-dominated fitness
vector, to a non-dominated system that uses ranks fit-
ness functions. This extension to Deb’s system per-
forms better than others on the problem of railway
timetabling and reflects the objectives of the train
planning problem more accurately.
REFERENCES
Clarke, M., Hinde, C., Withall, M., Jackson, T., Phillips, I.,
Brown, S., and Watson, R. (2009). Allocating railway
platforms using a genetic algorithm. In Proceedings of
AI-2009, The Twenty-ninth SGAI International Con-
ference on Innovative Techniques and Applications of
Artificial Intelligence, pages 421–434. SGAI.
Deb, K., Mohan, M., and Mishra, S. (2005). Evaluating
the domination based multiobjective evolutionary al-
gorithm for a quick computation of pareto-optimal so-
lutions. IEEE Transactions on Evolutionary Compu-
tation, 13(4):501–525.
Deb, K., Pratap, A., Agarwal, S., and Meyarivan, T. (2002).
A fast and elitist multi-objective genetic algorithm:
NSGA-II. IEEE Transactions on Evolutionary Com-
putation, 6(2):181–197.
Syswerda, G. (1989). Uniform crossover in genetic algo-
rithms. In Schaffer, J., editor, Proceedings of Third In-
ternational Conference on Genetic Algorithms, pages
2–9, San Francisco, CA, USA. Morgan Kaufmann.
Ullman, J. (1975). NP-complete scheduling problems.
Journal of Computer and System Sciences, 10(3):384–
393.
TRAIN TIMETABLE GENERATION USING GENETIC ALGORITHMS
175
