
OPTIMIZING GENETIC ALGORITHM PARAMETERS FOR A
STOCHASTIC GAME
James Glenn
Department of Computer Science, Loyola University Maryland, 4501 N. Charles Street, Baltimore, Maryland, U.S.A.
Keywords:
Genetic algorithm, Parameter optimization, Stochastic games, Heuristics.
Abstract:
Can’t Stop is a jeopardy stochastic game played on an octagonal game board with four six-sided dice. Pre-
vious work generalized a well-known heuristic strategy for the solitaire game and attempted to optimize the
parameters of the generalized strategy using a genetic algorithm (GA). There were two challenges in that
optimization process: first, the stochastic nature of the game results in a very noisy fitness function; second,
the fitness function is computationally expensive. In this work we continue the optimization process for the
heuristic strategy by optimizing the GA: for a fixed number of fitness function evaluations, we investigate the
effects of varying the GA parameters (in particular the population size and number of generations), which in
turn affect the number of samples per individual and thus noise as well. We also examine different sampling
schedules; our schedules are unique in that selecting the final champion is considered a schedulable phase.
The GA parameters are first optimized on an easy-to-compute test function. The resulting GA parameters are
effective on the original problem and as a result we obtain an improved heuristic strategy for Can’t Stop.
1 INTRODUCTION
Can’t Stop is a board game for two to four players
with elements of both strategy and chance (Sackson,
2007). Simplified versions of Can’t Stop (includ-
ing solitaire versions) have been solved (Glenn et al.,
2008), but the original game is difficult to solve be-
cause of the large number of states that must be evalu-
ated. Keller (1986) developed a heuristic strategy that
Glenn and Aloi later generalized into a parameterized
strategy for solitaire Can’t Stop, where the parameters
were selected with a genetic algorithm (GA) (Glenn
and Aloi, 2009); the fitness of a set of parameters
was the average number of turns needed to complete
the game using the corresponding strategy. That fit-
ness function was estimated by repeated simulations
of game play. Because the amount of time needed to
simulate a game is nontrivial, it is not feasible to sim-
ply run the GA until the population stops improving;
it is more practical to limit the number of simulations
performed during each run of the GA. However, be-
cause of the noisy nature of the estimated fitness func-
tion, the GA is sensitive to its parameters, particularly
the population size and number of generations, and
to the scheduling of the evaluations (studied in a dif-
ferent domain by Aizawa and Wah (1993)), which to-
gether will determine the number of simulations per-
formed for a particular set of strategy parameters.
In this work we first optimize the GA parame-
ters by substituting an easy-to-compute test function.
We consider primarily population size, number of
generations, Aizawa and Wah’s “between-generations
scheduling”, and a new aspect of scheduling we call
“phase scheduling”. We obtain better parameters for
the generalized solitaire Can’t Stop strategy by opti-
mizing them with the resulting GA.
2 RULES OF CAN’T STOP
Can’t Stop was invented by Sid Sackson and orig-
inally published by Parker Brothers in 1980 (it is
currently published by Face 2 Face Games (Sack-
son, 2007)). Can’t Stop is one of a class of games
called jeopardy stochastic games (or, more specifi-
cally, jeopardy dice games when the stochastic ele-
ment is supplied by dice) in which each player’s turn
is a sequence of stochastic events, some of which al-
low the player to make progress towards a goal, and
some of which will end the player’s turn immediately.
After each incremental step towards the goal, play-
ers can choose to end their turn, in which case the
progressmade during the turn is banked and cannot be
lost on a later turn. Players who press their luck and
199
Glenn J..
OPTIMIZING GENETIC ALGORITHM PARAMETERS FOR A STOCHASTIC GAME.
DOI: 10.5220/0003079101990206
In Proceedings of the International Conference on Evolutionary Computation (ICEC-2010), pages 199-206
ISBN: 978-989-8425-31-7
Copyright
c
2010 SCITEPRESS (Science and Technology Publications, Lda.)
7
2
3
4
5
6
8
9
10
11
12
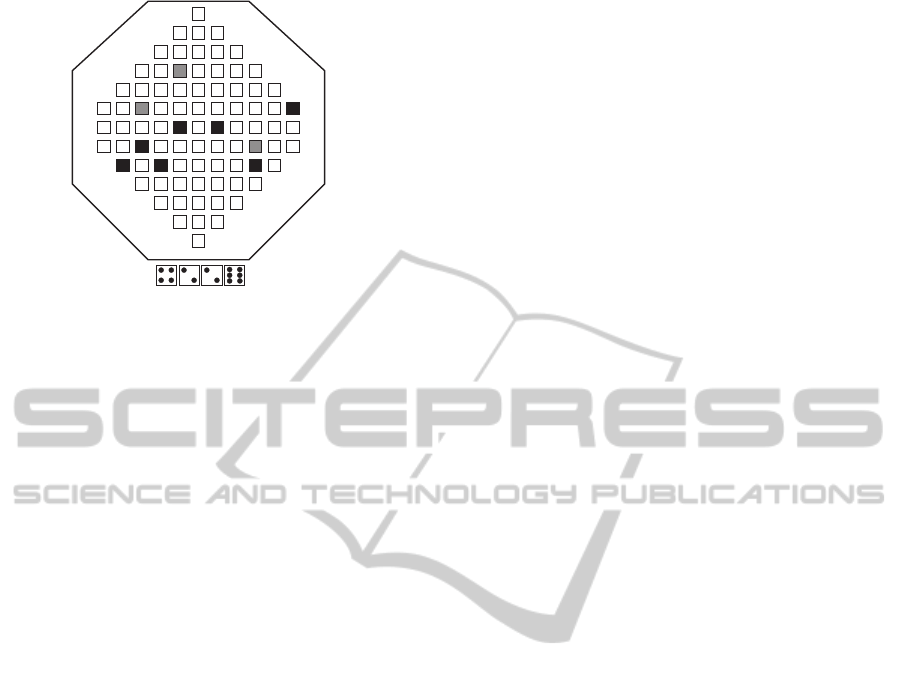
Figure 1: A Can’t Stop position. Black squares represent
the colored markers; gray squares are the neutral markers.
choose to continue their turns risk being forced to end
their turns by an adverse outcome of the stochastic
event (for example, rolling a one), in which case they
lose any progress made during the turn. Pig (solved
for two players (Neller and Presser, 2004; Neller and
Presser, 2006)), Ten Thousand, and Cosmic Wimpout
are other examples of jeopardy stochastic games.
The specific rules for Can’t Stop are as follows.
The game board has columns labelled 2 through 12
(the totals possible on two dice). Columns 2 and 12
are three spaces long, 3 and 11 are five spaces long,
and so forth to the thirteen spaces in column 7. Each
player has one marker for each column, colored to
distinguish them from other players’ markers. There
are three neutral markers (white) that are used to mark
progress during a turn. Each turn follows these steps:
(1) the current player rolls four six-sided dice;
(2) the player groups the dice into two pairs in such a
way that progress can be made in the next step – if
that is impossible then the turn ends immediately
with the neutral markers removed from the board
and the colored markers left as they are;
(3) in each column for the pair totals, either a new
neutral marker is placed one space above the
player’s colored marker or the neutral marker is
advanced one space, depending on whether there
was already a neutral marker in the column;
(4) the player chooses between returning to step (1) or
ending the turn, in which case the player’s colored
markers advance to replace the neutral markers.
The goal of the game is to be the first player to ad-
vance to the top of any three columns (or to do so in as
few turns as possible for the solitaire version). Once a
player wins a column then no player can make further
progress in that column. The player must use both
pair totals if possible, but is allowed to choose which
to use if the pairing in step (2) results in pairs such
that one or the other can be used, but not both at the
same time (this can happen if only one neutral marker
remains). (Note that there is ambiguity in the official
rules: we interpret the rule “if you can place a marker
on your roll, you must” so it applies after a player has
chosen how to pair the dice.)
For example, in Figure 1 the possible pair totals
would be 4 and 10 or 6 and 8. In the former case the
neutral markers would be moved ahead one space in
columns 4 and 10. In the latter case the marker in col-
umn 6 would be moved up one space but no progress
would be made in column 8 because all three neutral
markers have been used. If the roll had been 6-6-6-6
then the player would have lost all progress because
the only possible pair totals would be two 12s, but
column 12 has been won and so is out of play.
3 VALUE ITERATION AND
NEWTON’S METHOD
Retrograde analysis is a common bottom-up tech-
nique used to compute game-theoretic values of
positions by starting with the terminal positions
and working backwards towards the starting posi-
tion (Str¨ohlein, 1970). For acyclic games, retrograde
analysis simply evaluates positions in reverse topo-
logical order. This technique has been used to solve
solitaire Yahtzee (Woodward, 2003; Glenn, 2006).
Retrograde analysis in its more complexforms has
been applied to endgames for non-stochastic games
including chess (Thompson, 1986; Thompson, 1996),
checkers (Lake et al., 1994; Schaeffer et al., 2004),
and Chinese chess (Wu and Beal, 2001; Fang, 2005a;
Fang, 2005b), and has been used to solve Nine Men’s
Morris (Gasser, 1996), Kalah (Irving et al., 2000), and
Awari (Romein and Bal, 2003).
The cyclic and stochastic nature of Can’t Stop re-
quires a different approach. The cycles arise from the
fact that a turn can end with no progress made. Value
iteration is one approach to handling the cycles (Bell-
man, 1957). The value iteration algorithm starts with
estimates of the position values of each vertex. Each
vertex’s position value is then updated (in no particu-
lar order in the most general form) based on the es-
timates of its successor’s values to yield a new es-
timated value. In this way the estimates are refined
until they converge.
Because the cycles in Can’t Stop are only one
turn long (progress that has been banked can never be
lost), the game graph can be decomposed into com-
ponents, each of which component consists of an an-
chor representing the start of a turn and all of the
positions that can be reached before the end of that
ICEC 2010 - International Conference on Evolutionary Computation
200

turn. The components form an acyclic graph and
can be processed in reverse topological order. Iter-
ative methods can then be used within the compo-
nents; one method (Glenn et al., 2008) breaks the
cycles within the components by removing anchors’
incoming edges, guesses a position value x for the an-
chor, and then computes a new estimate f(x) of the
anchor’s position value. The resulting function f is
continuous and piecewise linear; the fixed point of f
gives the position value of the anchor. For any x, f(x)
and f
′
(x) can be computed using retrograde analy-
sis within the component. Computing f
′
(x) allows
the use of Newton’s method, which converges to the
fixed point significantly faster than value iteration or
its variants.
4 HEURISTIC STRATEGIES
The method described above has been used to solve
simplified variants of solitaire Can’t Stop. These vari-
ants use dice with fewer than six-sides and a board
with possibly shorter columns. The variants are re-
ferred to as (n, k) Can’t Stop where n is the number
of sides on the dice and k is the length of the shortest
column (with adjacent columns always differing by 2
in length).
The most complex version of solitaire Can’t Stop
that has been solved is (5, 2) Can’t Stop. Evaluating
its 17 billion positions took 60 CPU days; an estimate
for the time required to solve the official game us-
ing current techniques is 3000 CPU years. Heuristic
strategies for the full game are therefore still of inter-
est. Even for simple games heuristics are more useful
to human players: no human can memorize the data or
mentally perform the calculations needed to replicate
the optimal strategy for (5,2) Can’t Stop.
4.1 The Rule of 28
One heuristic strategy is the Rule of 28 (Keller, 1986).
The Rule of 28 is used to determine when to end a turn
by assigning a progress value to each configuration
of the neutral markers. Players should end their turn
when this value reaches or exceeds 28. The progress
value computation is split into two parts: one part for
measuring the progress of the neutral markers; and
one part for assessing the difficulty of making a roll
that will allow further progress.
The first part of the progress value is computed
as column-by-column sum. The value a column con-
tributes to the sum is computed as some constant
weight assigned to that column times one more than
the number of spaces advanced in that column. The
weights are one for column 7, two for columns 6 and
8, and so forth to six for columns 2 and 12, reflect-
ing the fact that it is more difficult to make progress
in the outer columns, and those columns are shorter,
so progress in them is therefore more valuable. So
if ~s = (s
2
,. .. , s
12
) where s
i
is the number of spaces
of progress in column i during the current move, then
the marker progress value is
p
m
(~s) =
12
∑
i=2
(s
i
+ 1)(|7−i|+ 1). (1)
Because certain combinations of columns are
riskier to be in than others, a difficulty score is added
to that sum. For example, if a roll is all evens then it is
impossible to make an odd pair total. Therefore, two
points are added to the progress value when all three
neutral markers are in odd columns. On the other
hand, every roll permits at least one even pair total,
so if the neutral markers are all in even columns, two
points are subtracted from the progress value, length-
ening a turn. Additionally,four points are added when
the columns are all high (≥ 7) or all low (≤7).
For example, in Figure 1 the progress value for
column 4 is (2 + 1) ·4 = 12, the progress value for
column 6 is (3+ 1) ·2 = 8, and the progress value for
column 10 is (1+ 1) ·4 = 8. Because all three neutral
markers are in even columns, 2 points are subtracted
to get a total progress value of 12+ 8 + 8 −2 = 26.
The Rule of 28 suggests rolling again.
A similar scheme can be used to determine how
to pair the dice: each column is assigned a weight and
each possible move is scored according to the weights
of the columns it would make progress in. The to-
tal is called the move value; the move with the high-
est move value is the one chosen. Giving the outer
columns lower weights than the middle columns (thus
favoring choosing the middle columns) works better
than the opposite pattern. In order to conserve neu-
tral markers, a penalty is subtracted for each neutral
marker used. In particular, if ~p = (p
2
,. .. , p
12
) where
p
i
is the number of squares advanced by a move in
column i and ~m = (m
2
,. .. , m
12
) where m
i
is 1 if the
move places a new neutral marker in column i and 0
otherwise, then the total move value is
v
(~p, ~m) =
12
∑
c=2
(p
i
·(6−|7−i|) −6·m
i
) (2)
For example, in Figure 1 using the 6 has a score of 5
(the move value of one space in column 6). Using the
4 and 10 has a score of 3+ 3 = 6, so this rule suggests
using the 4 and 10.
When we henceforth refer to the Rule of 28 we
mean the Rule of 28 combined with the above method
OPTIMIZING GENETIC ALGORITHM PARAMETERS FOR A STOCHASTIC GAME
201

of choosing how to pair the dice. This strategy av-
erages approximately 10.74 turns to win the solitaire
game.
4.2 Generalizing the Rule of 28
Any of the constants assigned to the columns can
be altered, as can the threshold and any of the diffi-
culty values. Furthermore, the spaces within a column
needn’t be assigned the same weights. In general, to
evaluate a particular move we denote the move by two
vectors ~m = (m
2
,. .. , m
12
) and~n = (n
2
,. .. n
12
) where
m
i
is the position of the neutral marker in column i (or
the colored marker if there is no neutral marker) be-
fore the move and n
i
is the position the neutral marker
would advance to after the move. Assign the weight
x
ij
to space j in column i. Then the total move value
v is the sum of the weight of the spaces that would
be advanced over in the current turn if that move was
made:
v
(~m,~n) =
12
∑
i=2
n
i
∑
j=m
i
+1
x
ij
. (3)
The same technique could be applied to progress val-
ues as well.
4.3 Linear Weights Strategies
Previous work studied two constrained versions of the
generalized heuristic (Glenn and Aloi, 2009). The
most flexible (and most successful) constrained the
progress values to be constant within each column
and required the move weights x
ij
to be described
by a linear function within each column. Specif-
ically, a Linear Weights strategy was described by
(p
2
,. .. , p
7
,m
2
,..., m
7
,b
2
,..., b
7
,e, o,h,k,t) where
1. the p
i
are progress values with p
i
∈ {0, .. .7} for
each column i ∈ {2, .. ., 7} (symmetry is used so
that, for example, p
8
= p
6
),
2. m
i
and b
i
define the linear function for column i
that determines the move weights of each space
within that column:
x
ij
=
m
i
·
j
l
i
+ b
i
(4)
(where l
i
is the length of column i, m
i
is chosen
from 32 somewhat arbitrarily chosen values be-
tween 0 and 64, and b
i
∈ {0,. .. ,7}),
3. e, o, and h are the even, odd, and high penalties
(each chosen from between -8 to 7 and with the
low penalty l equal to the high penalty h),
4. k is the marker penalty (between 0 and 15), and
5. t is the progress threshold (between 0 and 31).
The best Linear Weights strategy found achieved
an average score of 9.05 turns, with a standard devia-
tion of 2.30.
5 GENETIC ALGORITHM
The parameters of the Linear Weights strategies
have been optimized using a genetic algorithm
(GA) (Glenn and Aloi, 2009). Each candidate strat-
egy was encoded using the appropriate number of bits
for each parameter (87 total). Various-sized popula-
tions of those bit strings were subjected to standard
GA operators (two-point crossover, mutation, two-
round tournament selection) for twenty generations.
The fitness of an individual strategy was taken to be
the expected number of turns that strategy takes to fin-
ish the solitaire game. That expectation was estimated
by computing the mean over n simulated games. The
high level of noise in the evaluation function (the best
strategy found has a standard deviation of approxi-
mately 25% of its mean turns to complete the game)
was therefore an issue. Some attempt was made to de-
termine the optimal population size for a fixed number
of total evaluations, but the results were not conclu-
sive. We now strive to better optimize the parameters
of the Linear Weights strategies; to do so we will first
optimize the GA parameters. We continue with a GA
instead of some other optimization method for two
reasons:
1. the fitness function is multi-modal; and
2. Arnold and Beyer (2003) found that in a simple
environment with high levels of noise, evolution
strategies were more robust than other optimiza-
tion algorithms, and we assume that this robust-
ness is shared with genetic algorithms.
5.1 Optimizing Genetic Algorithm
Parameters in the Presence of Noise
For a fixed number of total simulations there is a
tradeoff between using more evaluations per individ-
ual (thus reducing noise) and having a larger popu-
lation (increasing diversity and allowing more of the
search space to be examined). Fitzpatrick and Gref-
fenstette (1988) performed analysis suggesting that in
noisy environments and given a fixed number of func-
tion evaluations, it is better to have a larger popula-
tion with fewer evaluations than a smaller population
with more evaluations. They then presented empiri-
cal work with two problems (a noisy version of one
of De Jong’s (1975) original test functions, and medi-
cal image registration) that confirmed their analysis to
ICEC 2010 - International Conference on Evolutionary Computation
202

a point: choosing a population size that allowed two
evaluations per individual was generally better than
choosing a population size that allowed only one eval-
uation. They used a fixed number of generations, ex-
cept that they reduced the number of generations in
cases where it was necessary to compensate for the
additional GA overhead required for larger popula-
tions (that is, when the GA overhead was not domi-
nated by the total evaluation time).
Arnold and Beyer (2003) found that for low levels
of noise, efficiencydrops as population size increases.
These two results together suggest that there is an op-
timal population size that is reached once noise is
reduced sufficiently. Experiments with the solitaire
version of the game Yahtzee (Glenn, 2007) presented
some confirmation of that, although the value exam-
ined was the average fitness in the final generation
rather than the best individual.
Aizawa and Wah (1993) considered the schedul-
ing of a fixed number of evaluations for a fixed pop-
ulation size in two senses: “duration scheduling” or
“between-generation scheduling”, which determines
how many evaluations are used during each genera-
tion; and “sample allocation” or “within-generation
scheduling”, which determines how many evaluations
are allocated to each member of a population within
a single generation. They found that performance im-
proves when more evaluations are scheduled in later
generations, and that a dynamic approach to within-
generation scheduling offers further improvements.
Jin and Branke (2005) survey more approaches to
dealing with noise.
We now wish to consider more completely the ef-
fects of GA parameters on the results with the aim
of further optimizing the Linear Weights strategies.
However, since a single run of the GA can take sev-
eral hours, it is computationally expensive to do so
by trial and error (or by using a meta-GA). Instead,
we optimize the GA parameters for a function that is
easier to compute and then hope it has characteristics
similar enough to those of the fitness function for the
Linear Weights strategies so that the same GA param-
eters will work well for the latter.
5.2 Schwefel’s Function
The function we choose to model noise is Schwefel’s
function, a well-known function used to benchmark
genetic algorithms (M¨uhlenbein et al., 1991; T¨orn
and Zilinskas, 1989). Schwefel’s function takes n real
numbers as inputs and is defined by
s(x
1
,..., x
n
) =
n
∑
i=1
420.9697−x
i
·sin
p
| x
i
|. (5)
Schwefel’s function is continuous and highly multi-
modal; those properties along with the fact that it can
be extended to any number of inputs makes it a desir-
able test case. We define a family of functions equal
to Schwefel’s function with noise introduced: let s
′
n,σ
be defined by
s
′
n,σ
(x
1
,..., x
n
) = s(x
1
,..., x
n
) +
N
(0;σ), (6)
where the last term denotes a random variable with
the given normal distribution. This variable is chosen
anew each time s
′
n,σ
is evaluated.
When the inputs are restricted to [−500, 500],
Schwefel’s function is minimized to zero when all
inputs x
i
are equal to 420.9697.. . (which is near a
boundary and far from the next-best local minima,
which occur when x
i
= −302.5249.. . for one i and all
other x
i
equal 420.9697. ..). In the absence of noise
there are methods that have no trouble finding this
minimum. We wish to determine, for different noise
levels, the optimal parameters for a GA that uses a
fixed number of evaluations of s
′
n,σ
. We will inves-
tigate how those parameters depend on n and σ, and
how effective the resulting GA is.
5.3 Selecting GA Parameters
We now consider optimizing the following genetic al-
gorithm parameters: 1) the population size; 2) the
number of generations; 3) the between-generations
schedule, simplified so the number of evaluations
used during a particular generation is a linear function
of the generation number; and 4) the “phase sched-
ule”. The phase-scheduling problem is a third type
of scheduling problem we introduce to go along with
between- and within-generation scheduling. Our GA
is divided into two phases: the evolution phase, and
the final champion selection phase. The latter phase
is necessary for two reasons: because the expected
number of evaluations per member of the population
will be very low, it is impossible to select the over-
all most fit individual with any confidence; and it is
currently infeasible to compute the exact fitness of a
particular Linear Weights strategy. The latter compli-
cation is not present when dealing with test functions
with artificially introduced noise such as Schwefel’s
function or De Jong’s function (one can simply evalu-
ate the exact fitness by not adding in the noise), and is
not present to the same extent when dealing with Fitz-
patrick and Greffenstette’s problem of medical image
registration (instead of estimating fitness by using a
sample of pixels, one can compute the exact fitness by
examining every pixel; there is additional overhead,
but that overhead can be accounted for).
We therefore add a second phase to the GA after
the final generation has been generated. In this phase
OPTIMIZING GENETIC ALGORITHM PARAMETERS FOR A STOCHASTIC GAME
203
we use many more evaluations in order to greatly im-
prove our fitness estimates so we can determine with
some confidence the overall most fit individual (the
“final champion”) from among some pool of candi-
dates, which we take to be the entire final generation.
We use a constant mutation rate and crossover rate
and do not consider the effects of dynamic within-
generation scheduling, although we do use a some-
what simplified version of dynamic scheduling in the
final champion selection phase.
Results of a meta-GA used to determine optimal
parameters for a GA optimizing s
′
(x
1
,. .. , x
10
,1000)
indicated that evaluation scheduling is less important
than the population size and number of generations –
the meta-GA tended to settle on the same values for
population size and number of generations but chose
wider ranges for the other parameters over several
runs. We therefore examined the former two param-
eters more closely. We varied the number of gener-
ations between 32 and 1024 and the population size
between 64 and 2048. We ran a GA with those pa-
rameters to optimize s
′
n,σ
. Each run of the GA used
2,500,000 total fitness evaluations, the same number
of evaluations for each generation, and 16% of evalu-
ations to select the final champion. Sixteen bits were
used to represent each input to s
′
(n). The mean fit-
ness of the final champion over 100 runs of the GA
for s
′
10,1000
, s
′
10,4000
, and s
′
20,1000
are given in Tables
1-3. Values that are statistically significantly different
than the minimum (boxed) at the p = 0.05 level are
given in bold.
Table 1: Average fitness of champions for s
′
10,1000
.
Population
Gen. 128 256 512 1024 2048
32 190.3 99.02 72.21 69.31 70.71
64 151.4 58.24 46.06 50.75 54.89
128 125.3 48.54 40.79 45.92 50.05
256 134.1 44.77 40.30 46.39 52.69
512 149.0 50.74 41.48 45.73 57.61
1024 113.5 54.95 47.23 51.50 59.51
Table 2: Average fitness of champion for s
′
10,4000
.
Population
Gen. 128 256 512 1024 2048
32 271.2 173.0 165.7 172.6 218.7
64 220.0 125.4 101.0 104.2 132.3
128 201.9 103.1 91.78 89.89 103.4
256 218.7 107.3 89.74 93.67 100.3
512 217.1 120.8 100.1 94.85 110.8
1024 240.4 138.5 109.7 105.1 114.8
Table 3: Average fitness of champion for s
′
20,1000
.
Population
Gen. 128 256 512 1024 2048
32 1115. 685.3 491.7 394.2 338.7
64 667.4 311.3 165.1 139.6 138.4
128 560.1 222.2 112.7 103.4 113.4
256 496.6 206.2 100.1 101.7 114.4
512 475.7 202.3 106.6 106.1 119.2
1024 446.3 203.7 119.4 117.0 131.6
We can compare the performance of the GA in
the presence of noise to the results obtained by the
Breeder Genetic Algorithm (BGA) (M¨uhlenbein and
Schlierkamp-Voosen, 1993). In the absence of noise,
BGA was able to find the minimum of the 20-input
version of Schwefel’s function using 16,100 func-
tion evaluations. We performed roughly 155 times
as many evaluations. Applying those evenly to the
16,100 inputs evaluated by BGA would reduce the
noise level for s
′
20,1000
to approximately
1000
√
155
≈ 80;
our GA on average found solutions about 1.25 stan-
dard deviations from the minimum.
The optimal parameters seem to be fairly insen-
sitive to the noise level and the number of inputs. If
anything, there is possibly a trend towards a larger
population as noise and number of inputs increase.
That is perhaps a counterintuitive notion since those
changes would result in fewer evaluations per indi-
vidual and one might expect that noise would be best
mitigated by increasing the number of evaluations per
individual.
6 TRANSFER TO CAN’T STOP
Guided by the results on the noisy version of Schwe-
fel’s function, we ran a GA to optimize the Linear
Weights strategies using a population of 512 individ-
uals evolved over 256 generations. We used 10
6
eval-
uations per execution of the GA, allocating an equal
number of evaluations to each generation and 16%
of the total to select the final champion from the last
generation. Then, to check whether those parameters
were optimal for the Linear Weights strategies, we
reran the GA for populations of 128, 256, 512, and
1024 evolved over 64, 128, 256, and 512 generations.
We ran the GA up to 60 times for each combination of
parameters; the average fitness of the final champions
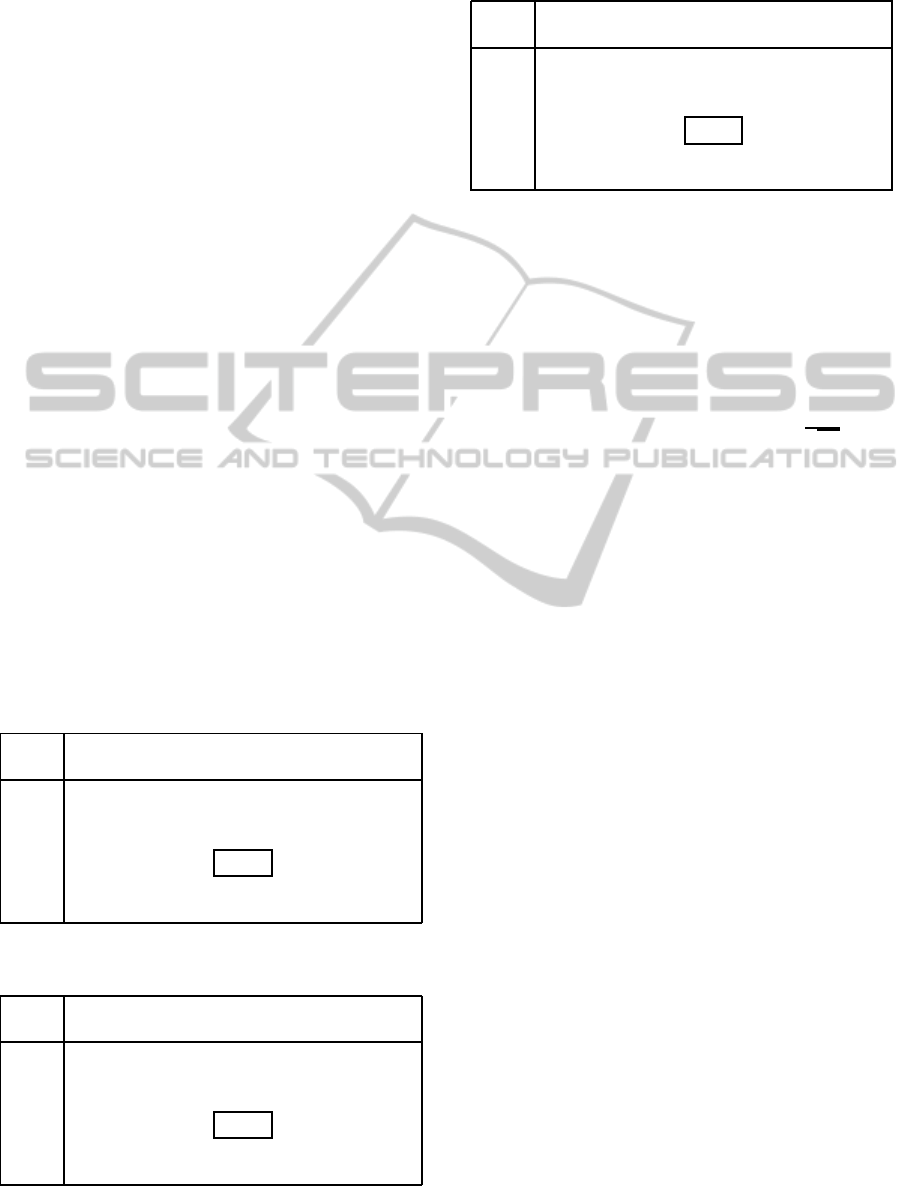
are given in Table 4.
We have also run the GA with different between-
generation schedules and different phase schedules
to confirm that the parameters have the same (very
small) effect on the GA for the Linear Weights strate-
ICEC 2010 - International Conference on Evolutionary Computation
204
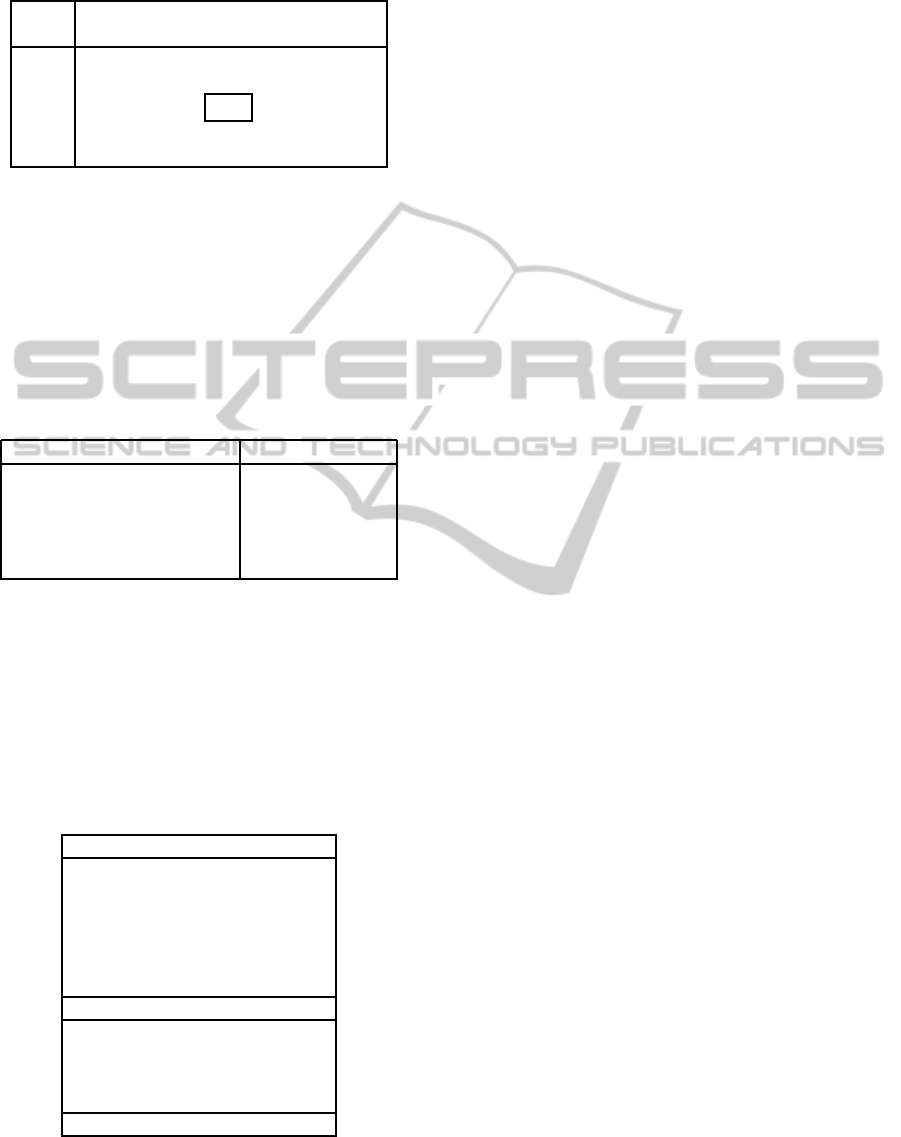
Table 4: Effects of GA parameters on linear weights cham-
pions.
Population
Gen. 64 128 256 512 1024
64 9.01 8.93 8.95 8.97 9.00
128 8.98 8.92 8.90 8.95 8.95
256 8.93 8.91 8.89 8.92 8.97
512 8.94 8.91 8.91 8.94 9.05
1024 8.96 8.92 8.95 9.01
gies that they do on the noisy Schwefel’s function.
Results are given in Table 5 and compared to the
standard of 256 generations, population 256, 16% of
evaluations to select the final champion, and constant
between-generation schedule. Statistically significant
differences are in bold; it seems that varying these pa-
rameters has as much effect as varying the population
size or number of generations by a factor of two.
Table 5: Effects of evaluation scheduling on linear weights
champions.
Variation Champion Mean
Standard 8.889
8% to select champion 8.897
32% to select champion 8.904
3x evaluations in first gen. 8.913
3x evaluations in final gen. 8.890
The best strategy found over all the runscompletes
solitaire Can’t Stop in an average of 8.78 turns (ver-
sus 9.05 for the best in the previous work by Glenn
and Aloi (2009)). It was found using a GA with
a population of 512 and 256 generations, and with
a between-generations schedule that allocated three
times as many evaluations to the final generation as
to the first. Its parameters are given in Table 6.
Table 6: Overall linear weights champion.
Column Progress Move
2,12 15 72x+ 15
3,11 13 48x
4,10 8 56x+ 3
5,9 8 44x
6,8 4 28x+ 7
7 3 32x+ 5
Difficulty Scores
odds 11
evens -1
highs, lows 4
marker 12
threshold 61
The encoding used here uses one more bit per pa-
rameter, thus allowing a wider range of values for
each. Furthermore, one bug has been fixed since
Glenn and Aloi’s original implementation of the gen-
eralized heuristic. To isolate the effects of those
changes from the effects of the optimized GA param-
eters, we ran the GA with the changes in effect but
with the old, unoptimized GA parameters (population
400, 20 generations, but 25% more evaluations). The
average fitness of the final champion was 9.12 with a
best over 40 runs of 8.93. About half of the improve-
ment is therefore due to the more expressiveencoding
combined with the bug fix and about half is due to the
optimized GA parameters.
6.1 Other Games
In a previous study (Glenn, 2007) we introduced a
class of strategies for solitaire Yahtzee that use an es-
timate of the expected score in each category to esti-
mate the position value at the start of each turn. We
optimized the estimates using 34 runs of a genetic al-
gorithm and found a strategy with an expected score
of 243.63. We reran the GA 40 times using the same
parameters as for Can’t Stop and found a strategy with
an expected score of 244.11, which closes 4.4% of the
gap to the optimal score of 254.59.
7 CONCLUSIONS
We have confirmed previous results in other domains
suggesting that, in the presence of noise, there is some
fairly low optimal number of samples per individ-
ual. A key difference is the definition of “fairly low”:
Fitzpatrick and Greffenstette (1988) found the opti-
mal value to be 2; our results show a optimal value
between 10 and 20 for Schwefel’s function and the
parameterized Can’t Stop heuristic. It remains to be
determined what characteristics of the objective func-
tion and noise determine the optimal number of sam-
ples and other GA parameters.
Our study shows that optimal GA parameters for
the generalized heuristic and for Schwefel’s function
are similar. The population size and number of gen-
erations were the most important parameters. The
effects of the allocation of evaluations within and
between phases (including our new final champion
phase) is roughly equivalent to the effect of varying
the population size or number of generations by a fac-
tor of two.
Finally, we were able to find a strategy for soli-
taire Can’t Stop that performs better than the best pre-
viously known, which had been found using unopti-
mized GA parameters. The success was matched for a
parameterized non-optimal solitaire Yahtzee strategy.
OPTIMIZING GENETIC ALGORITHM PARAMETERS FOR A STOCHASTIC GAME
205

ACKNOWLEDGEMENTS
James Glenn was supported by sabbatical leave
granted by the Loyola College of Arts and Sciences
at Loyola University Maryland.
REFERENCES
Aizawa, A. and Wah, B. (1993). Scheduling of genetic al-
gorithms in a noisy environment. In Forrest, S., editor,
Proc. 5th Intl. Conf. on Genetic Algorithms, pages 48–
55, San Mateo, CA. Morgan Kaufman.
Arnold, D. and Beyer, H.-G. (2003). A comparison of evo-
lution strategies with other direct search methods in
the presense of noise. Comp. Opt. and App., 24:135–
159.
Bellman, R. E. (1957). Dynamic Programming. Princeton
University Press, Princeton, NJ, USA.
De Jong, K. (1975). An Analysis of the Behavior of a Class
of Genetic Adaptive Systems. PhD thesis, University
of Michigan.
Fang, H. (2005a). The nature of retrograde analysis for Chi-
nese chess, part I. ICGA Journal, 28(2):91–105.
Fang, H. (2005b). The nature of retrograde analysis for Chi-
nese chess, part II. ICGA Journal, 28(3):140–152.
Fitzpatrick, J. and Grefenstette, J. (1988). Genetic algo-
rithms in noisy environments. Machine Learning,
3:101–120.
Gasser, R. (1996). Solving nine men’s Morris. Computa-
tional Intelligence, 12:24–41.
Glenn, J. (2006). An optimal strategy for Yahtzee. Techni-
cal Report CS-TR-0002, Loyola College in Maryland,
4501 N. Charles St, Baltimore MD 21210, USA.
Glenn, J. (2007). Computer strategies for solitaire Yahtzee.
In IEEE Symp. on Comp. Intell. and Games, pages
132–139.
Glenn, J. and Aloi, C. (2009). A generalized heiristic for
can’t stop. In Proc. 22nd FLAIRS Conf., pages 421–
426. AAAI Press.
Glenn, J., Fang, H., and Kruskal, C. P. (2008). Retrograde
approximate algorithms for some stochastic games.
ICGA Journal, 31(2):77–96.
Irving, G., Donkers, J., and Uiterwijk, J. (2000). Solving
Kalah. ICGA Journal, 23(3):139–147.
Jin, Y. and Branke, J. (2005). Evolutionary optimization
in uncertain environments – a survey. Evolutionary
Computation, IEEE Transactions on, 9(3):303–317.
Keller, M. (1986). Can’t stop? Try the rule
of 28. World Game Review, 6. See also
http://www.solitairelaboratory.com/cantstop.html last
visited Nov. 22, 2008.
Lake, R., Schaeffer, J., and Lu, P. (1994). Solving large ret-
rograde analysis problems using a network of work-
stations. In van den Herik, H., Herschberg, I. S., and
Uiterwijk, J., editors, Advances in Computer Games
VII, pages 135–162. University of Limburg, Maas-
tricht. the Netherlands.
M¨uhlenbein, H. and Schlierkamp-Voosen, D. (1993). Pre-
dictive models for the breeder genetic algorithm. Evo-
lutionary Computation, 1:25–49.
M¨uhlenbein, H., Schornisch, M., and Born, J. (1991). The
parallel genetic algorithm as function optimizer. Par-
allel Computing, 17:619–632.
Neller, T. and Presser, C. (2004). Optimal play of the dice
game Pig. The UMAP Journal, 25(1):25–47.
Neller, T. and Presser, C. (2006). Pigtail: A Pig addendum.
The UMAP Journal, 26(4):443–458.
Romein, J. W. and Bal, H. E. (2003). Solving the game of
Awari using parallel retrograde analysis. IEEE Com-
puter Society, 36(10):26–33.
Sackson, S. (2007). Can’t Stop. Face 2 Face Games, Provi-
dence, RI, USA. Boxed game set.
Schaeffer, J., Bj¨ornsson, Y., Burch, N., Lake, R., Lu, P., and
Sutphen, S. (2004). Building the checkers 10-piece
endgame databases. In van den Herik, H., Iida, H.,
and Heinz, E., editors, Advances in Computer Games
10. Many Games, Many Challenges, pages 193–210.
Kluwer Academic Publishers, Boston, USA.
Str¨ohlein, T. (1970). Untersuchungen ¨uber kombinatorische
Spiele. PhD thesis, Fakult¨at f¨ur Allegemeine Wis-
senschaften der Technischen Hochschule M¨unchen,
Munich.
Thompson, K. (1986). Retrograde analysis of certain
endgames. ICCA Journal, 9(3):131–139.
Thompson, K. (1996). 6-piece endgames. ICCA Journal,
19(4):215–226.
T¨orn, A. and Zilinskas, A. (1989). Global Optimization.
Springer Verlag, New York.
Woodward, P. (2003). Yahtzee: The solution. Chance,
16(1):18–22.
Wu, R. and Beal, D. (2001). Fast, memory-efficient retro-
grade algorithms. ICGA Journal, 24(3):147–159.
ICEC 2010 - International Conference on Evolutionary Computation
206
