
A GENERALIZED EXTREMAL OPTIMIZATION-INSPIRED
ALGORITHM FOR PREDICTIVE MAINTENANCE
SCHEDULING PROBLEMS
Pasquale Arpaia
Dipartimento di Ingegneria, Università del Sannio, CERN European Laboratory for Nuclear Research
Department of Technologies, Group of Magnets, Superconductors and Cryostats
M26220, (30-03-030) CH-1211 Geneva 23, Switzerland
Domenico Maisto
Institute for High-Performance Computing and Networking (ICAR), Italian National Research Council (CNR)
Via P. Castellino 111, 80131 Naples, Italy
Carlo Manna
Dipartimento di Ingegneria Elettrica, Università degli Studi di Napoli Federico II
Via Claudio 21, 80125 Napoli, Italy
Keywords: Artificial Intelligence, Optimization Methods, Maintenance, Scheduling.
Abstract: A bit-encoded heuristic evolutionary optimization algorithm inspired by the Generalized Extremal
Optimization method is presented. The proposed evolutionary approach aims at optimizing a predictive
maintenance scheduling problem characterized by an analytically intractable objective function. A
preliminary comparison with a standard genetic algorithm on a set of high-dimension cases of the
considered maintenance problem shows better performance for the proposed approach.
1 INTRODUCTION
Evolutionary algorithms are excellent heuristic
methods, inspired by biological evolution, to solve
complex optimization problems with analytically
intractable objective functions. Although
evolutionary-based methods approximate the
optimal solution without guaranteeing its optimality,
the underlying principles of natural evolution ensure
promising results (De Sousa and Ramos, 2002). This
turns out to be useful especially in real-time
complex optimization.
The most popular and used methods are mainly:
Genetic Algorithms (GA) (Goldberg, 1989),
Simulated Annealing (SA) (Kirkpatrick et al, 1983),
and algorithms based on Swarm Intelligence, such as
Ant Colony Optimization (ACO) (Dorigo et al,
1996), and Particle Swarm Optimization (PSO)
(Kennedy and Eberhart, 1995), (although the last
two are biological inspired heuristics, not considered
tightly evolutionary by the survey).
However, the aforementioned algorithms in their
practical implementation for optimization problems
have a problematic feature: the optimal solution is
searched through a stochastic process sensitive to a
suitable setting of adjustable parameters. A proper
setting affects the performance of the algorithms
significantly, and in many practical cases this
becomes a costly task in itself. Moreover, most of
them are population-based, thus their run is time-
consuming compared to other algorithms.
By exploiting the Self-Organized Criticality state
theory (SOC) (Bak, Tang and Wiesenfeld, 1987) in
ecosystems, Boettcher and Percus proposed a novel
evolutionary optimization method called Extremal
Optimization (EO) (Boettcher and Percus, 2001),
successfully applied to complex combinatorial
optimization problems. EO method relies on the
70
Arpaia P., Maisto D. and Manna C..
A GENERALIZED EXTREMAL OPTIMIZATION-INSPIRED ALGORITHM FOR PREDICTIVE MAINTENANCE SCHEDULING PROBLEMS.
DOI: 10.5220/0003080200700076
In Proceedings of the International Conference on Evolutionary Computation (ICEC-2010), pages 70-76
ISBN: 978-989-8425-31-7
Copyright
c
2010 SCITEPRESS (Science and Technology Publications, Lda.)

Bak-Sneppen model (Bak and Sneppen, 1993), a
simplified model of natural co-evolution in
ecosystems: a number of species in a system evolves
to reach the best adaptation; the worst adapted
species are forced to evolve more quickly to avoid
extinction. This mechanism determines an overall
adaptation for the ecosystem as a whole.
Beyond these encouraging results, the
evolutionary approach proposed in (Boettcher and
Percus, 2001) adds two peculiar features: only one
setting parameter is needed and a single candidate is
processed at each iteration. These two aspects are “a
priori” advantages with respect to the traditional
evolutionary approach (as GA, SA, PSO and so on).
These noteworthy characteristics have
encouraged the employment of EO algorithm to
tackle different physics issues or engineering
applications, particularly hard to face.
Predictive maintenance scheduling belongs to
this class of problems; it could be described in this
way: an optimal action sequence for maintaining a
system in order to avoid potential breakdowns is to
be found. The terms predictive indicates that some
problem parameters cannot be constant during the
process, but are continuously updated in real time.
Thus, the planned schedule (the optimal solution)
must to be re-organized for every modification of
the examined system state and the constraints of the
task. Moreover, such as many maintenance
scheduling problems, the corresponding
optimization problem is characterized by an
analytically intractable objective function to be
minimized. Hence, it needs for a heuristic approach
to search the optimal solution.
Among the above variations of EO, the
Generalized Extremal Optimization (GEO)
algorithm (De Sousa, Ramos, 2002) was built to be
applied on a wide class of complex problems. Its
particularity lies in working on strings composed by
bits with “fitness” proportional to the contribution to
the quality of the whole solution generated by their
mutation.
Following this simple idea, in this paper a GEO
application is proposed for the problem of the
predictive maintenance. After an outline of the
proposed method, preliminary experimental results
on a set of analytically intractable scheduling
problems are shown in order to highlight better
performance than a standard GA.
2 THE PROPOSED METHOD
In the present section, first, a formulation of
predictive maintenance scheduling problem is
detailed and, then, the proposed heuristic algorithm
is presented.
2.1 Statement of the Predictive
Maintenance Scheduling Problem
2.1.1 Experimental Motivations
The maintenance scheduling formulation proposed
in the following is to be faced under the framework
of the industrial research project MONDIEVOB
(Buildings Remote Monitoring and Evolutionary
Diagnostics), granted by POR 3.17 ICT Regione
Campania (Italy).
The long-term goal of MONDIEVOB is a
predictive maintenance tool for processing
experimental information acquired from building to
be maintained in order to assess reliability and
predict possible future failures (Figure 1), by means
of algorithms able to predict future status of a
machine or a process (Stapelberg, 2009). This
predictive information allows proactive
responsiveness in maintenance decision-making.
Figure 1: “Model of failure” module predicts probability
of failure of the considered system, from past and present
data. This predictive information updates the objective
function of the maintenance scheduler, in real time.
Essentially, the on-line available information
about the status of the monitored systems allows
maintenance operations to be anticipated/delayed
according to the actual conditions.
In order to accomplish this task, a formulation
evaluating different maintenance scenarios by
considering the associated cost effects of the
resulting maintenance operations and taking into
account the current and predicted machine
degradation levels has been set up. The cost of
A GENERALIZED EXTREMAL OPTIMIZATION-INSPIRED ALGORITHM FOR PREDICTIVE MAINTENANCE
SCHEDULING PROBLEMS
71

maintenance actions, availability and maintenance
resource constraints are taken into account.
2.1.2 Evaluation of Maintenance Schedule
Effects
The purpose of the method presented in this section
is defining a cost function in order to evaluate the
effects of any given maintenance operation.
The cost function used here takes into account
both: the cost associated to the maintenance action
(as, for example, the replacement of a given
component), and the cost associated to the system
operating in the normal state (as monitoring,
inspection and so on).
Let n be the available resources to maintenance
operation, and m
i
(for i=1,..., M) the i-th system
component that must be maintained (for a total of M
components). The function C, representing the total
cost of planned maintenance, can be expressed as:
C = a
i
+ p
i
(t)*B
i
()
+
i∈G
t
∑
k
j
+ b
j
(t)
()
j∈H
t
∑
⎛
⎝
⎜
⎜
⎞
⎠
⎟
⎟
t =1
T
∑
(1)
in which the following notation is used:
T finite time horizon of planned maintenance
t for t = 1, ..., T, the t-th instant of the time
horizon T
a
i
the operating cost of the i-th component
k
j
the replacement cost for the j-th component
b
j
time dependent maintenance cost of the j-th
component (Dekker et al., 1997)
p
i
(t) probability of failure of the i-th component at
the time t
B
i
cost of breakdown of the i-th component
G
t
the set of every component not maintained at
the time t
H
t
the set of every maintained component at the
time t
Moreover, any given planned maintenance evaluated
by means of (1) is subject to the following
constraints:
(i) Each m
i
can be served (maintained) by only one
of the n available resources at any time t;
(ii) Each m
i
has to be served at least one time
instant t during the total time horizon T;
Finally, it should be noted that the probability of
failure p
i
at the time t could be derived from various
deterioration models (Djurdjanovic et al., 2003;
Engel et al., 2000; Yu et al, 2005), depending on the
type of monitored component, and from the nature
of information or signals acquired.
2.1.3 Bit encoded Solution
In the present work, each maintenance schedule S
(called sequence, in the following) evaluated by
means of (1) is expressed through a binary string
representation as:
{
}
TMTTM
ssssssS ,,,;;,,,
2111211
…………
=
(2)
where s
ki
is the value of the corresponding bit. For
example, s
13
=1, means that the 3-th component is
maintained at the time instant t =1.
The sequence representation in (2) is suitable for
GEO approach proposed in the present paper and
described in the following section.
The maintenance problem is hard to solve even
for apparently simple cases (Stapelberg, 2009), as
the time required for computing an optimal solution
increases rapidly with the size of the study case.
2.2 Generalized Extremal
Optimization for Predictive
Maintenance Scheduling
2.2.1 Extremal Optimization
The basic idea of the proposed optimization method
is inspired by (Bak and Sneppen, 1993), as a
simplified model of natural evolution in ecosystems:
a number of species in a system co-evolves to reach
the best adaptation; the worst adapted species are
forced to evolve more quickly to avoid extinction.
This mechanism determines an overall adaptation
for the entire ecosystem. In fact, according to the
Bak-Sneppen model, a macroevolutionary
ecosystem pattern is characterized by durable
periods of quiescence interrupted by some burst of
rapid considerable change. In every part of this
pattern, it is possible to observe ecological
phenomena of different size, larger ones during the
periods of major activity and smaller ones in the
more quiet periods. The size and the frequency
distributions of these events follow typically a power
law that implies 1) dynamics is unique and it
underlies both the large and the small events (scale
invariance) 2) macroevolutionary behaviour of the
global ecosystem emerges spontaneously by local
interactions between species.Both features are
considered as key issues of a working definition of a
particular state, known in statistical physics as Self-
Organized Criticality (SOC) (Turcotte, 1999), in
which system fluctuates about conditions of
marginal stability without intervention of external
factors (Bak, Tang and Wiesenfeld, 1987).
ICEC 2010 - International Conference on Evolutionary Computation
72
Bak-Sneppen model can be simulated through an
algorithm in quite few steps. First, for each species,
a fitness value in the range [0,1], is drawn from a
random uniform distribution. Then, the worst
adapted species (the one with least fitness) mutates
and a new fitness value is assigned to it. The change
of the worst adapted species disfigures the fitness
landscape locally, involving also the fitness of its
neighbours. For this reason, they are constrained to
mutate too, even if they are well adapted. After some
iteration, the whole system evolves toward a critical
threshold value, bringing all species to a generalized
better level of adaptation.
The model described above directly inspires the
Extremal Optimization algorithm (Boettcher and
Percus, 2001). If we set C
as a candidate solution to
an examined problem composed of |C| design
variables denoted by
x
i,
its basic heuristic procedure
is the following:
1. Initialize the variables x
i
of C
at will; set C
best
= C.
2. For the current solution C,
a) set a fitness F
i
to each
variable x
i
,
b) find j such that F
j
is better
than F
i
for all i,
c) choose C’ in a neighborhood N(C)
of C so that x
j
must change
d) accept C = C’ unconditionally,
e) if F(C) - the total fitness of
the solution C - is better
than F(C
best
) then set C
best
= C.
3. Repeat step (2) as long as
desired.
4. Return C
best
and F(C
best
).
Although the above procedure shows good
performance in problems where there exist many
neighbourhood configurations of C, otherwise it
leads to a deterministic process that damages the
search of the optimal solution. To avoid this, the
algorithm was modified in some steps by
introducing into a single parameter (Boettcher and
Percus, 2001).
In particular, the steps 2.b and 2.c, have been
modified as follow: in step 2b the |C| variables x
i
are ranked so that to the variable with the worst
fitness is assigned rank 1, and to the one with the
best fitness rank |C|. Each time the algorithm
passes through step 2c a variable is chosen to be
mutated according to a probability distribution of the
k ranks, given by:
P(k)≈k
−
τ
,1≤ k ≤ N,
(3)
where τ is a positive setting parameter. By means of
the parameter τ, the algorithm can choose any
variable to evolve, although the most probable
variables are those with worst fitness.
2.2.2 Generalized Extremal Optimization
and his Application
Unfortunately, EO application to a broad class of
problems is limited by some drawbacks. One of
these consists in giving a general definition for the
fitness of the single species, and this means that
different problems have different ways to assign the
fitness to the variables (Boettcher and Percus, 2001).
To clear the hurdle, De Sousa and Ramos
devised a generalization of the EO called
Generalized Extremal Optimization (GEO) (De
Sousa and Ramos, 2002) capable to tackle either
continuous, discrete or integer variables. In GEO,
the variables of the optimization problem are
arranged in a string similar to a GA chromosome, as
it is shown in Figure 2.
Figure 2: An example of the GEO encoding: N design
variables of 6 bits. Each bit is considered as a species (De
Sousa and Ramos, 2002).
This section deals with the details of a GEO
approach to the predictive maintenance scheduling
problem solving - that is also a direct way to
illustrate the GEO procedure.
The goal of the proposed method is to find the
best sequence, expressed as in (2), that minimizes
the objective function (1) for the problem described
in the section 2.1.
Let us consider a sequence (i.e., a maintenance
schedule); as aforementioned, a sequence can be
encoded in a binary string, denoted by S of length
(M*T) by means of the representation shown in (2).
This manner to express a sequence is particularly
suitable to be faced with a GEO. Indeed, in analogy
to what EO algorithm does, GEO works on a
population (configuration) by muting, generation
after generation, a single species (component) and
by estimating the obtained candidate solution, with
the aim to reach the optimal one.
A GENERALIZED EXTREMAL OPTIMIZATION-INSPIRED ALGORITHM FOR PREDICTIVE MAINTENANCE
SCHEDULING PROBLEMS
73

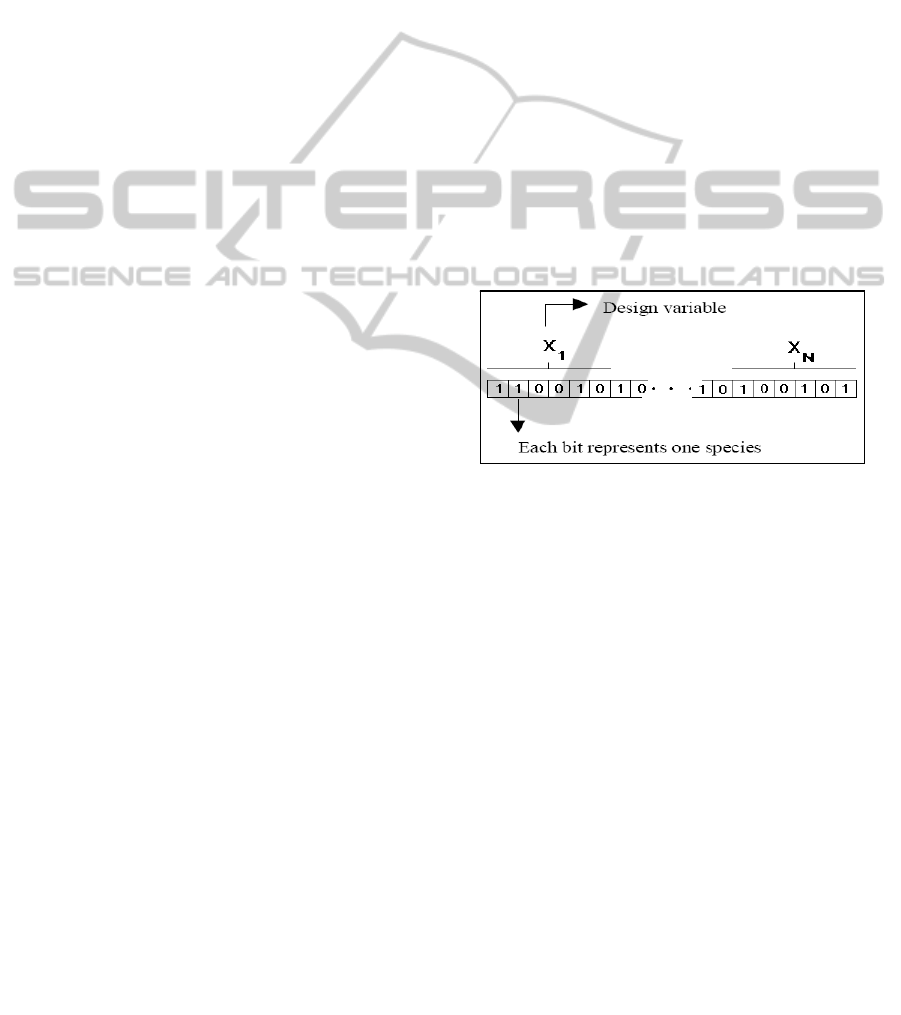
Thus, if one assumes that every representation bit
encodes a single species then an entire population
can be expressed by means of a binary string, hence
by a sequence in the form (2) too. Figure 3 illustrates
the correspondence between bit-species and
sequence-population in a visual way.
For the above reasons, a GEO algorithm can
straightly work on a sequence S by evaluating the
candidate solution to the considered maintenance
problem through the cost function (1). This means
that the lesser is the cost of the sequence the better is
the scheduling. Differently than the EO algorithm, at
each bit (species) is assigned a fitness value
proportional to the decrease of the function (1)
computed for the sequence with that bit flipped (i.e.,
mutated from 1 to 0 or vice versa).
Then, each bit is ranked, such that: to the one
with the least fitness is assigned rank 1, while to the
one with the best fitness rank N.
Subsequently, a new sequence is generated by
flipping a bit chosen according the probability law
(3) defined on the rank set.
Figure 3: A candidate solution in our GEO approach is a
sequence S (evaluated by (1)), composed of (M*T) bits, as
defined in (2). In this example, M=6 components are
maintained by n=3 resources in the time horizon T.
This iterative process halts after a prefixed
number of generation, and it returns the best
sequence S
best
which minimizes the objective
function (1).
The proposed procedure is described by the
following pseudo-code:
1. Initialize a bit sequence S
(with size M*T) randomly and
evaluate the objective function
C (as in (1));
Set: S
best
= S and C
best
= C(S);
2. For each generation:
a) For each bit i of S:
- Change the bit i (from 1 to 0,
or vice versa) and evaluate
the cost C(S
i
)(as in (1))for
S
i
;
- Evaluates the fitness of bit i
as ΔC(S
i
)=C(S
i
)- C
best
- Restore the bit i to its
previous value.
b) Sort ΔC(S
i
) in ascending way;
c) Choose the bit to change with
probability (3);
d) Set S = S
i
and C = C(S
i
);
e) If C < C
best
then set C
best
= C, and
S
best
= S;
3. Return S
best
and C
best
It is worth underlining that, as regard to the
traditional evolutionary algorithms (GA, SA and so
on), the present procedure has twofold advantage: (i)
there is only one adjustable parameter τ, so it
simplifies the setting task and (ii) the entire
evolution is made on one configuration solution S at
the time, unlike the traditional evolutionary
population based algorithm, and this entails lesser
computational costs and a better memory
management.
3 EXPERIMENTAL RESULTS
Preliminary experimental tests are carried out in
order to validate the effectiveness of the proposed
GEO algorithm in comparison with a standard GA
(SGA) on four high dimension scheduling cases of
the problem described in section 2.1. The problem
parameters are reported in Table 1, while the
parameter settings for both algorithms are reported
in Table 2.
Table 1: Problem parameters: the bit encoded solution
length, as defined in (2), is evaluated by means of (M*T)
bits.
Problem parameters
# M n T Solution length
(2) [bit]
1 6 2 6 36
2 8 3 8 64
3 10 4 10 100
4 10 4 15 150
ICEC 2010 - International Conference on Evolutionary Computation
74
As it should be noted from Table 2, the
population size for both algorithms are not reported.
This because the proposed GEO works only on 1
individual and performs a number of evaluations as
the solution length. Therefore, for example, in the
problem #1 the proposed GEO performs 36
evaluations at each iteration, while, for the problem
#3 it performs 100 evaluations at each iteration.
Therefore, in order to compare the proposed GEO
and SGA, the population size of the last algorithm
has been set to: 36 for the problem #1, 64 for the
problem #2, 100 for the problem #3 and, finally, was
150 for the problem #4.
For each problem, it was performed 50 runs for
both algorithms.
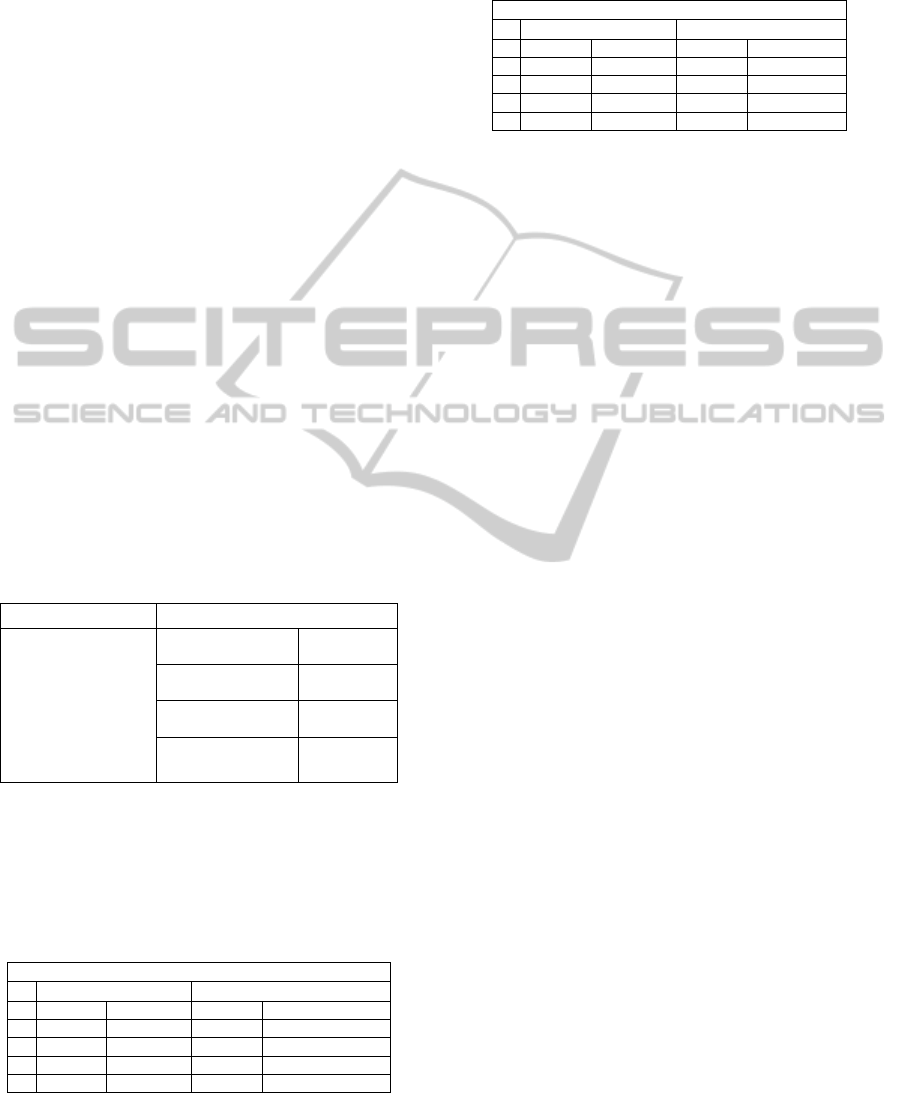
In Table 3 and Table 4 are reported the
preliminary experimental results.
In particular, Table 3 shows a comparison
between the costs of the best solutions (mean value
and standard deviation) achieved for GEO and SGA.
As one can see, both algorithms have the same
performance on the first two cases (#1 and #2), but
GEO outperforms SGA better and better while
increasing the size of the sequence.
However, in Table 4, the difference between the
algorithm presented in this work and SGA is
noticeable.
Table 2: Parameter settings for the GEO application and
the standard GA.
Proposed GEO GA
τ = 0,75
Mutation mechanism
Uniform
Crossover mechanism
Single point
Crossover fraction
0.8
Selection mechanism
Roulette
In particular, the proposed approach obtains the best
solution in lesser number of iteration on the average,
highlighting appreciable results.
Table 3: Best solution achieved (mean and standard
deviation) by means of the GEO algorithm and the
standard GA, for the 4 scheduling cases of Table 1.
Comparison test: best solution cost
#
Mean Standard deviation
GEO GA GEO GA
1 70 70 0 0
2 104 104 10
-
3
10
-
3
3 164,04 170,1 3,97 4,06
4 219,54 400,01 4,95 4,12
Table 4: Number of iteration on average and standard
deviation to achieve the best solution by means of the
GEO application and a standard GA, for the 4 scheduling
cases of Table 1.
Comparison test: number of iteration
#
Mean Standard deviation
GEO GA GEO GA
1 65,12 3876 60,06 2177,16
2 1804,12 3636,6 1589,75 1961,98
3 3081,18 5306,5 1979,98 2062,98
4 8513,54 16667,3 5761,65 9164,24
4 CONCLUSIONS
In the present paper, a Generalized Extremal
Optimization (GEO) based algorithm for a
predictive maintenance scheduling problem has been
proposed.
Preliminary tests on a set of high dimension
scheduling problems for the GEO algorithm
compared with a standard GA shown encouraging
performance of the proposed approach.
In particular, the proposed GEO reaches the best
solution in lesser number of iteration on average,
compared with the standard GA.
Finally, as previously mentioned, the proposed
GEO has a peculiar feature: a single candidate is
processed at each iteration.
For this reason, a comparison between an
evolutionary algorithm having the same feature (as,
for example, Simulated Annealing) and the proposed
one, should be carried out in the future research.
REFERENCES
Bak, P. and Sneppen, K., 1993, Punctuated Equilibrium
and Criticality in a Simple Model of Evolution.
Physical Review Letters, Vol. 71, Number 24, pp.
4083-4086.
Bak, P., Tang, C. and Wiesenfeld, K.,1987, Self-organized
criticality: an explanation of 1 / f noise. Physical
Review Letters, 59: 381–384
Boettcher, S. and Percus, A. G, 2001, Optimization with
Extremal Dynamics. Physical Review Letters, Vol. 86,
pp. 5211-5214.
Dekker R. Wildeman R. E., Van der Duyn Shouten F. A.,
1997, A Review on multi-component maintenace
models with economic dependence, Mathematical
Methods on Operetion Research. 45: 411-435
De Sousa, F., Ramos, M. R., 2002. Function Optimization
using Extremal Dynamics. In 4th Int. Conf. On Inverse
Problem in Engineering, Rio de Janeiro, Brazil
Djurdjanovic, D., Lee, J., & Ni, J., 2003, Watchdog
agent—an infotronics based prognostics approach for
product performance assessment and prediction.
A GENERALIZED EXTREMAL OPTIMIZATION-INSPIRED ALGORITHM FOR PREDICTIVE MAINTENANCE
SCHEDULING PROBLEMS
75

International Journal of Advanced Engineering
Informatics, Special Issue on Intelligent Maintenance
Systems, 17(3–4), 109–125.
Dorigo, M., Maniezzo, V., Colorni A., 1996,, The Ant
System: Optimizing by a colony of cooperating
agents, IEEE Trans. Syst. Man Cybern-Part B, vol. 26,
n°1, pp 1-13
Engel, S. J., Gilmartin, B. J., Bongort, K., Hess, A., 2000,
Prognostics, the real issues involved with predicting
life remaining. Proc. Of the IEEE Aerospace
Conference Proceedings, 6, 457–469.
Goldberg, D. E., 1989, Genetic Algorithms in Search,
Optimization, and Machine Learning, Addison-Wesley
Publishing Company.
Kennedy, J., Eberhart, R. C. 1995 Particle Swarm
Optimization, In Proc. of the 1995 IEEE International
Conf. on Neur. Networks, vol. 4, pp. 1942-1948, IEEE
Press, Piscataway, NJ
Kirkpatrick, S., Gellat, C. D. and Vecchi, M. P., 1983,
Optimization by Simulated Annealing, Science, Vol.
220, Number 4598, 1983, pp. 671-680.
Stapelberg, R. F., 2009, Handbook Reliability,
Availability, Maintainability, and Safety in
Engineering Design, Springer – Verlag 2009
Yu, G., Qiu, H., Djurdjanovic, D., Lee, J., 2005, Feature
signature prediction of a boring process using neural
network modeling with confidence bounds,
International Journal of Advanced Manufacturing
Technology. Turcotte, D.L., 1999, Self-organized
criticality. Reports on progress in physics, vol 62, n°
10
ICEC 2010 - International Conference on Evolutionary Computation
76
