
Hovering Information:
A Self-Organising Infrastructure-Free Information
Storage and Retrieval Service
Alfredo A. Villalba Castro
1
, Giovanna Di Marzo Serugendo
2
and Dimitri Konstantas
1
1
Department of Information Systems, University of Geneva
CUI-Bat A, 7 rt de Drize, 1227 Carouge, Switzerland
2
Computer Science and Information Systems, Birkbeck (University of London)
Malet Street, London, WC1E 7HX, U.K.
{Alfredo.Villalba, Dimitri.Konstantas}@unige.ch
dimarzo@dcs.bbk.ac.uk
Abstract. This paper introduces the Spatial Memory concept which defines any
geographical location as a memory where information can be stored and
retrieval by user-applications. The Hovering Information Middleware is also
introduced as a constrained implementation of the Spatial Memory concept.
This middleware is based on results presented on previous works related with
Hovering Information. Two main modules of the middleware are discussed and
evaluated, the Storage and the Retrieval Modules. The evaluation is done by
simulations using both random-way-point and real mobility patterns. Real
mobility patterns are generated with the SLAW real mobility model. The
simulations evaluate current storage and retrieval algorithms and outlines the
major drawbacks and potential improvements for next milestones.
Keywords. Mobile services, Geolocalisation, Ad-hoc networking.
1 Introduction
Nowadays, we are witnessing the extraordinary progress of technology in terms of
miniaturization and communication. Fixed and mainly mobile devices are much
smaller and much more powerful than ten years ago. It has become normal for
someone walking in the street to carry with him a mobile phone having as much
memory and computing power as a personal computer of the nineties. Besides this
fact, current devices (both fixed and mobile) possess powerful wireless
communication interfaces which make them able to communicate with distant servers
via the Internet or even to communicate between them in an ad hoc manner.
In the last decade, mobiles devices as they are becoming more powerful have
started playing an important role enabling people to be connected not only between
them (phone calls and text messages) but to the Internet and then to all the ad hoc
services. In addition, the increasing development of geo-localized services leads us to
the design of even more powerful services in mobile devices.
Besides the technological improvements and the undisputed success of the
Internet, the scheme of how information is produced, stored and retrieved has been
Castro A., Di Marzo Serugendo G. and Konstantas D.
Hovering Information: A Self-Organising Infrastructure-Free Information Storage and Retrieval Service.
DOI: 10.5220/0004465500690087
In Proceedings of the 4th International Workshop on Enterprise Systems and Technology (I-WEST 2010), pages 69-87
ISBN: 978-989-8425-44-7
Copyright
c
2010 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

also evolving from centralized schemas to community and collective ones. We are not
any more limited to applications working with only one or a group of some powerful
servers on which information (databases, videos, profiles,...) is stored. We are now
facing services such as peer-to-peer sharing files (kaaza, bittorrent,...), user-produced
streaming video (YouTube), and social networking (MySpace, Facebook,
LinkedIn,...). These applications are different from classic ones in two points: either
they are peer-to-peer and there is no more a centralized server, or the information they
manage is produced in a collaborative and continuous way by the users.
However, mobile devices are still playing a passive role since most of them are
consumers of information but not producers. It is becoming usual for us to send and
receive emails, to browse and to navigate in a city thanks to the geo-localization in-
built services, all this in our mobile phone. But still, these applications are only
consumers of information and they have to get connected to a centralized server via
the Internet. What is still missing is applications benefiting from the potential of
collective work arising among mobile devices, sharing both information and
computing. Sensor networks, for instance, follow this paradigm but we want to extend
this vision to any set of mobile and stationary devices.
In addition, applications following the centralized scheme may face problems of
network saturation or robustness against failures. Moreover, stigmergy-based,
context-awareness or spontaneous social networking applications need to use
information being meaningful only locally, for a limited period of time, thus making
the use of (centralized) servers unnecessary. There is no need for the information to
travel a large geographical region when both the producer and consumer of that
information are next to each other.
In this paper, we introduce the Spatial Memory vision in which any region of the
earth may be defined as a memory able to store and retrieve any kind of information.
Spatial memory as a general concept may rely on any kind of technology from
centralized servers to mobile devices, from infrastructure to mobile ad hoc networks.
However, we propose a concrete implementation of spatial memory called Hovering
Information which has been already presented in previous works 121314. In other
words, we have extended the Hovering Information concept to the more general
concept of Spatial Memory.
In addition to the conceptual definitions we present in this paper, we also present a
middleware architecture for the Hovering Information implementation. We discuss
about its requirements and properties. We also present the storage and retrieval
algorithms which are the core of the middleware. Storage and retrieval have been
evaluated through simulations using both random-way-point mobility pattern and real
mobility patterns.
1.1 Related Work
The Virtual Infrastructure project 4567 defines virtual (fixed) nodes implemented on
top of a MANET. This project proposes first the notion of an atomic memory,
implemented on top of a MANET, using the notion of quorums or focal points where
a reasonable amount of mobiles nodes intersect. The motivation behind this project is
the development of a virtual infrastructure on top of which it will be easier to define
or adapt distributed algorithms such as routing, leader election, atomic memory,
71

motion coordination, etc. Hovering information shares similar characteristics, it tries
to benefit from the mobility of the underlying nodes, but the goal is different. We
intend to provide a hovering information service on top of which applications using
self-organising user-defined pieces of information can be built.
GeOpps 9 proposes a geographical opportunistic routing algorithm over VANETs
(Vehicular Ad Hoc Networks). This work focuses on routing information to some
geographical location, it does not consider the issue of keeping this information alive
at the destination, while this is the main characteristics of hovering information.
The work proposed by 10 aims to disseminate traffic information in a network
composed by infostations and cars. While the idea is quite similar to that of hovering
information, keeping information alive in its relevant area, this study does not
consider the problem of having a limited amount of memory to be shared by many
pieces of information or the problem of fragmentation of information. It also takes the
view of the cars as the main active entities, and not the opposite view, where it is the
information that decides where to go.
The Ad-Loc project 1 proposes an annotation location-aware infrastructure-free
system. Notes stick to an area of relevance which can grow depending on the location
of interested nodes. Notes are kept in their relevance area is by periodically
broadcasting location-aware information to neighbouring nodes. This work also
proposes to use this annotation system as a cache for Internet files in order to spare
bandwidth. In this case, URLs are used as note identifiers. Similarly to the previous
work, nodes are the active entities. In addition, in this case the size of the area of
relevance grows as necessary in order to accommodate the needs of users potentially
far from the central location. The information then becomes eventually available
everywhere.
The ColBack system 28 is part of the MoSAIC project and intends to set up a
collaborative backup system for mobile devices. This system does not focus on geo-
localized information but replication strategies and replica scheduling and
dissemination techniques could be used as inspiration for hovering information
replication algorithms.
PeopleNet 11 describes a mobile wireless virtual social network which mimics the
way people seek information via social networking. It uses the infrastructure to
propagate queries of a given type to users in specific geographical locations called
bazaars. Within each bazaar the query is further propagated between neighbouring
nodes via peer-to-peer connectivity until it finds a matching query. The proposed
queries propagation inside bazaar techniques could be a source of inspiration when
we will develop query to retrieve specific hovering information.
2 Spatial Memory
The main idea is that of making a geographical region to behave as a memory where
information of any kind could be stored, modified and read by user applications. This
information will be stored in devices (mobile and fixed) being inside the region. The
environment is highly dynamic as devices can leave the region, fail, run out of
memory or just be switched off; or new devices can enter into the region.
72
Let us develop a more global vision of the concept. We consider the surface of the
earth as a whole geographical region in which plenty of computers, servers, mobile
phones, PDAs, RFIDs, smartphones, iPhones, sensors, etc are storing and gathering
information; processing it and producing still new information. The exchange of
information between all of them is via the Internet or local networks using wireless or
fixed technologies. Let us call all these devices as nodes and let us sub-divide the
whole region in arbitrary sub-regions that we will also call them regions by
simplicity.
Each region has potentially some storage capacity where information can reside;
this capacity depends on the number, characteristics and state of devices being inside
the region at some point in time. We can imagine that information could be of any
type and size, from text to video and from some bytes to several megabytes (or even
gigabytes).
Once a piece of information created, it will have a self-organizing nature. The
information will be responsible of staying at the region with which it is associated, or
to migrate from one region to another if requested. It will be responsible of being
accessible by user applications that will be able to read and modify it. To achieve all
this goals, information will use the storage, computing and communication resources
of the nodes. Regions are passive elements of spatial memory and pieces of
information are the active ones.
It is important to notice that one major difference between Spatial Memory and
current information management systems (databases, servers, p2p) is the way of
addressing information. Traditional systems associate an address to a server or a peer
storing information through which we can reach the information on request. However,
in the Spatial Memory concept the way of addressing information is by geographical
regions. We ask for information having some type and content, but being stored at
some particular region. However, it is also possible to ask for information having
some characteristic without specifying its location, in this case it is up to Spatial
Memory to figure out where the information is stored. In both cases, there is a strong
relation between geographical location and information because the latest is anyway
stored at some region.
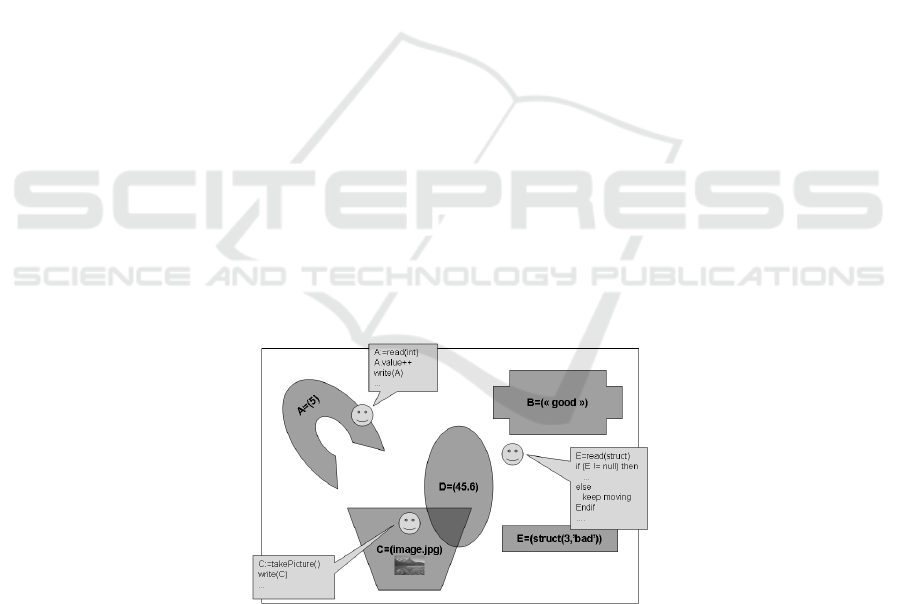
Fig. 1. Spatial Memory Vision.
User applications will only have to make use of simple primitives to basically read
or write information from/to some region. Spontaneous social networking, disaster
73

areas, stigmergy-based and context-aware applications are the most appropriate for
using this paradigm. Figure 1 depicts a geographical region where several pieces of
information co-exist and each is associated with a specific region. We can also
observe the presence of user applications that access the information of their interest
in order to perform some tasks.
Extrapolating the vision of Spatial Memory to current information management
systems (i.e. web, video/audio streaming, databases, etc.), we can consider this
information as information attached to the regions of these servers. Whenever specific
information is required by a client, the data will then migrate from the region of the
server to the region of the client, where it is processed by user-applications. Another
view is of considering the whole earth as the region of information stored in servers.
2.1 Requirements and Issues
Setting up a system such as Spatial Memory is undoubtedly not trivial since the
environment is highly dynamic and unreliable. In the paragraphs below, we
enumerate and discuss the most relevant requirements and issues.
Persistency. This is a major issue because of the dynamism and unreliability of the
environment. In such conditions, an existing piece of information is likely to
disappear when a node switch off or leave some region; a node runs out of memory;
or some network errors happen. It is then extremely important that information find
by itself the way to stay alive, to survive. In the other hand, time life of information
depends on its nature. There might be some information being relevant only for some
few minutes or hours; and another for some weeks or months. It is evident that short
time life information fits better with this environment.
Reliability. While persistency deals with keeping information alive, reliability
consists on keeping information accessible for nodes willing to read or modify it.
Again, this is a very challenging issue to address. An existing piece of information
may leave its meaningful region and be the last one piece on this area. Therefore, any
node willing to access it will not be able to do it even though the information still
exist. Although a fully reliability is the ideal situation, several applications might not
need such a quality to still work well. For instance, instantaneous social networking
applications may be more flexible in terms of reliability compared to disaster areas
applications.
Consistency. Being Spatial Memory a highly distributed information storage system,
inconsistency problems will follow. We can identify two sources of inconsistency.
First, the fact that a piece of information will certainly exist in several nodes
(distributed), a consistency issue arises when some node modifies its content and this
modification must take some while to be known by other nodes hosting the same
piece of information. Another situation is concurrent modification of a piece of
information, two different version of the same information could exist at the same
time. Last case, when the same information exist in two different and not overlapping
regions, in this case each region could have a different version. In all these cases,
ensuring consistency is a challenge. However, inconsistency in information could also
be an advantage in some cases since human social information is most of the time
contradictory (there is no an absolute knowledge) and society still works.
74

Atomicity. When writing, reading or modifying a piece of information, Spatial
Memory must ensure the atomicity of these operations. Some information could be
split in several pieces of information and spread in several nodes depending on the
storage capacity of nodes. Later, this pieces will be merged into one piece of
information to be used by applications. This kind of behaviour is definitely a
challenge to overcome when dealing with atomicity. Another source of problems is
communication failures but we could delegate this responsibility to the overlay
network.
Trust. The nature of information is dynamic and user defined. These aspects are both
an advantage and at the same time a source of trust challenges. We have to address
challenges such as how to trust to some information published by some one else, or
how to be sure that some information is not a trap for us. More an application relays
on the reliability of the source of information, more it will sensible to the trust of
information. As a first approach, we can image a kind of reputation systems in order
to solve this problem.
Integrity. An application should be able to modify only its related information. In this
way, integrity of information has to be conserved. It is in this context that attributes
such as owner and access rights are aimed to exist. At the same time, it arises a
problem of supplanting an identity and then modifying an information that normally
we could not do it. Again, it is another challenging issue to solve when designing a
concrete implementation of Spatial Memory.
Cooperation and Privacy. Spatial Memory requires a high degree of participation
from nodes. But, this means that nodes have to be willing of sharing theirs storage,
computing and networking resources. Otherwise, such a system will not work because
it needs a critical mass of participants. Besides this problem of cooperation, it arises a
problem of security and privacy. Participant nodes need enough guarantees that they
will not be attacked because of being more open to cooperate, or that their private
data would be accessible by anyone. A possible solution could be setting up a virtual
machine on nodes to create a fully protected space where spatial memory could work.
3 Hovering Information Middleware
This section outlines a particular design of the Spatial Memory concept described
above. Leveraging on our previous work on hovering information 1314, we show here
how to build such a service through a middleware called Hovering Information
Middleware (HIM).
3.1 Global Overview
The middleware assumes the presence of mobile (fixed) nodes moving around a
geographical 2D area. Each node is able to store and process information, that we call
it hovering information, as well as sent it to and receive it from neighbouring nodes in
an ad hoc manner. User-applications are able to create information to be stored at a
specific geographical region chosen by the application itself or by the middleware.
75
The creation process of information could be both triggered by a human user or by the
application itself in an automatic way.
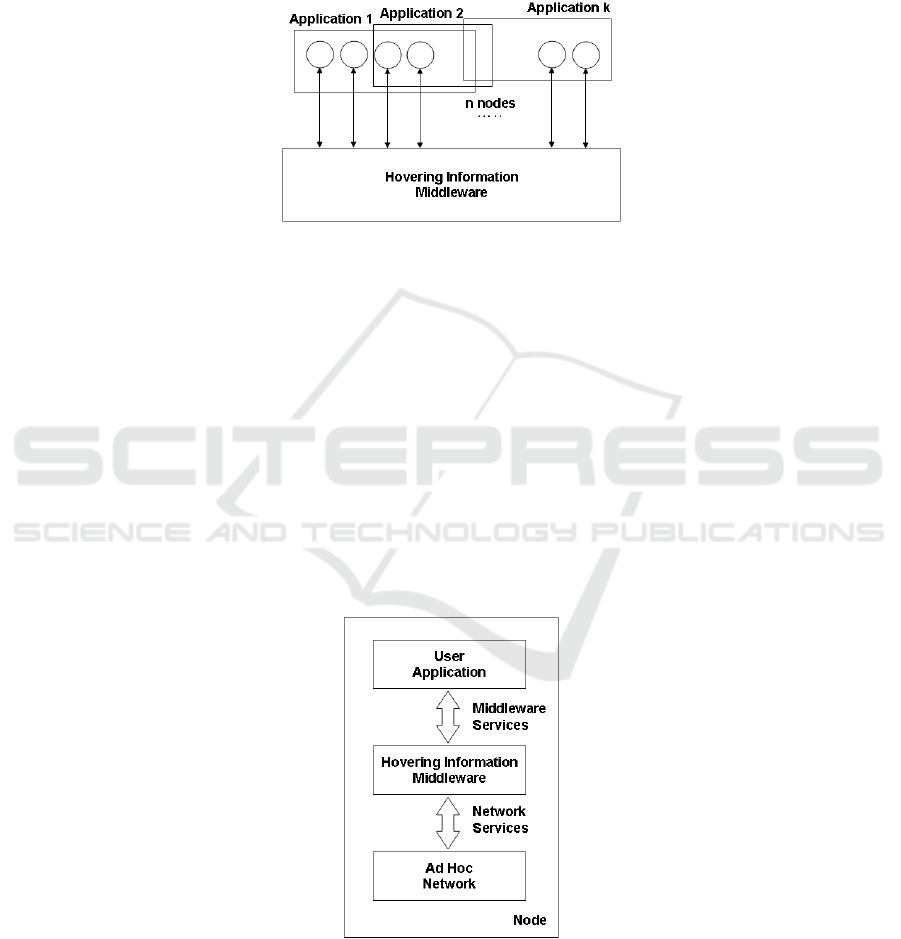
Figure 2 depicts several applications running on different groups of nodes; each
application interacts with the hovering information middleware in order to perform its
task.
Fig. 2. Applications Deployment.
A piece of hovering information can be of any type from simple raw text to
videos. Once created, a piece of information might be attached to a precise
geographical region defined by the user-application. If not, it is up to the middleware
to find a region where to store it. In both cases, information can be retrieved from
anywhere unless strict region-bounded constraint is specified.
From an application perspective, hovering information is a concept characterising
self-organising information responsible to find its own storage on top of a highly
dynamic set of mobile devices. A piece of hovering information is attached to a
specified location, which we call the anchor location. The main requirement of a piece
of hovering information is to keep itself stored in the vicinity of the anchor location,
which we call the anchor area, despite the unreliability of the device on which it is
stored. Whenever the mobile device, on which the hovering information is currently
stored, leaves the area around the specified storage location, the information has to
hop - hover - to another device.
Fig.3. Node Architecture.
76

Pieces of hovering information have to be seen as information particles
"suspended" into the given geographical region, being attracted by their anchor
location. A piece of hovering information comes with a unique identifier, the actual
data value to store and additional policies for spreading, self-destruction, etc. By
means of simplicity, we will use the term information or hovering information in a
exchangeable way.
From a conceptual point of view, the middleware itself is responsible of two main
tasks: storing information (persistency) and retrieving it. We assume that the
middleware use network primitives such as sending and receiving data, and services
such as discovering neighbouring devices. On top of this, applications make use of the
middleware services. Figure 3 illustrates these three layers in a node and their
relation.
The current middleware we propose is designed to work in mobile ad hoc
networks. In previous works 1314, we studied the behaviour of some simple but
fundamental algorithms being responsible of the basic mechanism of keeping
information persistent in a highly dynamic environment. Sub-section 4 discuss more
in detail these algorithms.
3.2 User-application Primitives
The way how an application interacts with the middleware is through an Application
Protocol Interface (API). Besides basic primitives for writing and reading
information, the middleware proposes primitives for subscribing an application to
some information-related events; and for defining regions, filters and policies. Let us
explore more in detail each of these primitives.
1. write(h, a, p) – This primitive allows an application to write a piece of information
h into a region a having the p policies.
2. write(h, p) – This primitive allows an application to write a piece of information h
having the p policies. It is to the middleware to define the most appropriate region
where h will be written.
3. read(q, a)::h – This primitive allows an application to retrieve a piece of
information h matching the query q and being stored into the region a. If no
information matches the query, an null value is returned.
4. read(q)::h – This primitive allows an application to retrieve a piece of information
h matching the query q. It is up to the middleware to decide where to look up for this
information. If no information matches the query, an null value is returned.
5. subscribe(h) – This primitive allows an application to automatically be notified
when information h has been modified or removed.
6. notifiy() – This primitive is called by the middleware to inform to an application
that a subscribed information has been modified or removed.
7. region(w)::a – This primitive allows an application to define a geographical
region by its vertices w. A priori, the geometrical form of this region should be any. A
region will be the semantic scope of a piece of information. The definition could be
also done by passing the center and the radius of the region, in which case the region
will a circle.
8. applyRegionOperator(operator, a, b)::c – This primitive allows an application to
77
combine two regions a and b and produce a new one c which will be the results of an
operator such as union, intersection or subtraction among others. This kind of
operators may be useful when extending the semantic scope of some information for
instance.
9. defineFilter(expression)::f – Existing several pieces of information stored in the
global region and many of them being stored in the same region or in overlapped
ones, it should be possible to define a filter f when reading some information. This
filter would define by an expression the region or regions, the type of information, the
user id application, the owner id, the content, the author id, etc.
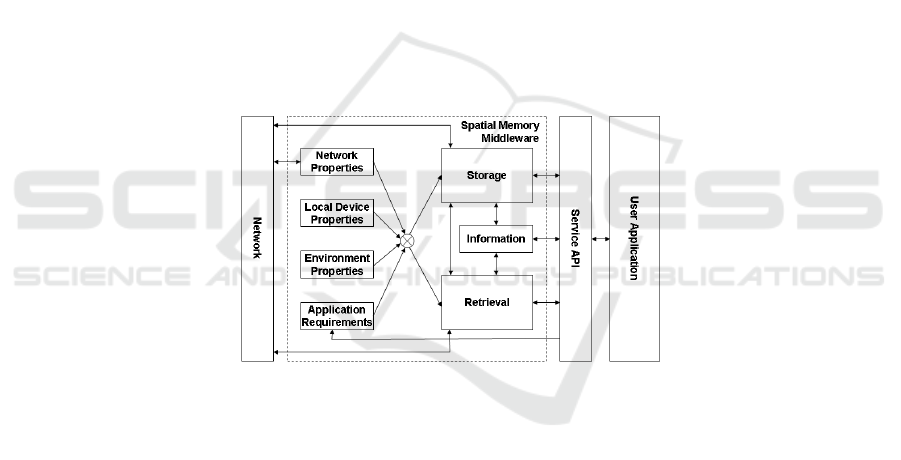
3.3 Middleware Architecture
The hovering information service is designed as a middleware service. It is a
distributed service and each node must implement it. The Figure 4 outlines the
proposed architecture.
The core of the proposed middleware are the Storage and Retrieval modules, both
coordinate their behaviour according to the network properties (i.e. network
saturation), local device properties (i.e. node routines), environment properties (i.e.
neighbours state) and application requirement (i.e. low delay response when reading
an application related information).
Fig. 4. Hovering Information Middleware Architecture.
Storage. This module is responsible of storing information in a region. It has as
inputs data such as the network state, the local node state and the neighbours state.
This data is provided by the respective modules. Some previous research has been
done for this module and two algorithms have been proposed: attractor point and
location-based caching 14.
Retrieval. This module is responsible for looking for an information requested by an
user application. The information is searched in a particular region and filtered after
the defined filter. The simple case is when information is stored at the current region,
otherwise a process of propagation of the query will be triggered and the requested
information, if found, will migrate to the querying area of the user application.
Network Properties. This module provides a transparent access to the network
properties and current state such as traffic congestion, bandwidth, delay and current
78

neighbours among others. These network characteristics are used by the Storage and
Retrieval modules in order to adapt their behaviour.
Local Device Properties. Local information of the device such as memory size,
current position, current speed and prediction of location is made available by this
module. This information is part of the set of parameters that Storage and Retrieval
modules take in consideration to adapt their behaviour.
Environment Properties. This module makes available some other environment
parameters such as neighbours nodes and their characteristics such us their current
position and velocity vector.
Application Requirements. This module provides to the Storage and Retrieval
modules parameters defining the expected performances an user applications requires
to work in the right manner. Modules should have to adapt their efforts in order to
reach these requirements as best as possible.
Information. This module is responsible of managing and processing the hovering
information that is stored or retrieved from a region. It deals with attributes such as
the age of the information, generation, priority, type, owner, etc. Meta-data such as
replication time, version, creation time and generation are also processed in this
module in cooperation with Storage and Retrieval modules (cf. §4).
3.4 Middleware Properties
The proposed middleware's properties come out from the design of the Storage and
Retrieval modules and from the nature of the context which is highly dynamic and
unreliable.
Infrastructure-Free. There is no need of infrastructure for this service. It is a kind of
opportunistic service that profits from the presence of devices being around to do its
job. It does not rely on any centralized server.
Self-Organisation. Once created and introduced in a region a piece of information,
this last is completely autonomous. It looks by itself to survive and be accessible for
user applications. The kind of operations that information could be able to do for this
goal include replication, propagation, splitting, merging, swarm behaviour, etc.
Best-Effort Service. Being the environment highly dynamic, the service provided by
spatial memory is not fully reliable and user applications should be designed having
in mind this characteristic. However, user applications are able to specify their
minimal requirements in order to achieve their goals.
Migration. We emphasize the fact that semantic scope of information is bounded to
some region. However, it might be possible to replicate this scope some where else or
to be expanded. In this case, semantic scope should be extended and modified and
then a migration of information should be done.
Garbage Collector. Pieces of hovering information come with policies. Those
policies prescribed a time-to-live limit after which the information self-destroys. This
starts counting from the last time the information has been accessed or modified. This
however means that the data is in fact modified to remember the last time of access.
79

Load-Balancing. The place where a piece of hovering information is stored is
decided by either the application or the middleware (if not specified an specific
region). In both cases, information replicates itself in quest of survive and competes
with other information. Therefore, several different pieces of information may co-
exist and previous results 14 have shown that geographical region is fairly distributed
among different pieces of information.
4 Storage and Retrieval Algorithms
In this section we describe the current design of the storage and retrieval modules. We
discuss about the main issues when designing them, the current implementation and
its drawbacks, as well as the next milestone improvements in order to design a fully
working middleware.
4.1 Storage Module
The information storage module is responsible of storing pieces of information,
created by user-applications, in the most appropriate geographical region. As we
mentioned in §2.1, keeping information alive and available are major challenges of
such a system because of the highly dynamism of the environment.
Current Storage Algorithms. In previous work we have already presented two
storage algorithms, called as replication algorithms: attractor point (AP) and
broadcast-based (BB). We present the main concepts related to these algorithms.
Once a user-application creates a piece of information, the hovering information
middleware will store it in the most appropriate geographical area called the anchor
area. This piece of information can be tightly related to a geographical area (e.g. a
context-aware information) or not, in which case the middleware can store
information anywhere. In this paper, an anchor area is defined as a circle having a
center, the anchor location, and a radius, the anchor radius, both defined by the user
application to an specific piece of information. For simplicity we assume in this paper
that an anchor area is always defined as a circle, but we could imagine that it could
have any shape than a circle.
The AP and BB algorithms are based on self-replication. When a replica is in risk
of disappearance it starts replication itself. To this aim, an anchor area and its
surroundings are divided in four continuous areas, all of them having as center the
anchor location. The secure area which is a disc having a radius smaller than the
anchor radius, therefore this area is inside the anchor area. The risk area, which is
the prolongation of the safe area beyond the anchor area, is a ring having a minimal
radius equal to the radius of the safe area and a maximal radius greater than the
anchor radius. The meaningful area is also a ring having a minimal radius equal to
the maximal radius of the risk area and a maximal radius being normally quite far
away from the anchor location. And finally the irrelevant area is the rest of the rest
of the area where information is likely not relevant.
80

When a replica is in the risk area, it starts replication itself constantly in the quest
of surviving. While the BB algorithms replicates a replica into all the neighbours of
the respective host, the AP algorithms tries do it better by targeting only those
neighbours being the k-closest ones (replication factor) to anchor location. We define
the following attributes: replication factor (k
R
), replication timer (T
R
) and cleaning
timer (T
C
). A replication being in risk replication itself each T
R
seconds and a node
removes irrelevant replicas (those being in the irrelevant area) each T
C
seconds.
Besides the two replication algorithms, we have also introduced two caching
policies: the location-based caching (LBC) and the generation-based caching (GBC).
In fact, in a context where several applications co-exist and each of them has several
pieces of information (several context variables), it might happen that replicas
compete for storage resources. That is why caching policies have been defined in
order to choose the most appropriate replicas when storage space is not enough in a
hosting node. The LBC policy is the most interesting and the most appropriated after
our previous results 14. It is based on the location of the competing replicas and the
hosting node. The most relevant replica to the host's location will have the priority.
Drawbacks of the Current Storage Algorithms. Previous replication algorithms
and caching policies are not good enough yet. Although, they achieve their goals and
their performances are good, the mayor drawback resides on the network overhead.
The following paragraphs discuss these issues.
Once a replica is in its risk area, the replication frequency depends on the network
saturation, the current state of host node's neighbours, the life cycle of the replica, ans
the kind and priority of the information. This means that the replication mechanism
adapts its behaviour to the saturation of the network in order to reduce the bandwidth
consumption. Concerning the state of neighbours, a host node is constantly receiving
messages from its neighbours, some of them are related to hovering information. In
this way, by receiving some replication messages from away, a host node can estimate
which replicas are already in its direct neighborhood, and a replication reduces its
replication if there are several copies of it around. Concerning the lifecyle, a replica
would have the tendency to replicate itself very often at the beginning of its existence,
and then will gradually reduce this frequency assuming that the are enough replicas
out there. Finally, a higher priority information will invest more effort on replication
itself.
The current design of the replication algorithms is thought limited. A replica
replicates itself when being in its risk area and keeps doing while being there with a
well defined replication frequency. Therefore, we can straight notice the main
drawback: network overhead. The current host of a replica may slowly pass through
the risk area, or event stay there, and the replica would keep replicating itself
permanently. An stop mechanism is needed. Moreover, the replication frequency is
constant but we could imagine that this may evolve along the time as well. A
compulsive replication might be suitable at the beginning of a prior of risk but not
after a while of estimating that survival is quite guaranteed.
The current AP replication algorithm replicates a replica potentially in risk to a set
of its neighborhood nodes being the closest ones to the anchor area of the replica.
However, this implies that a multicast or several unicast messages are sent. The
question that arises from this implementation is that broadcasting the replica to all
neighbours might be more efficient and more or less equally expensive in terms of
81

power.
Previous results shows that the current replication algorithms get good
performances in terms of keeping hoverinfos alive an available. However, the major
drawback is the network overhead even though the AP does much better than a
flooding scheme. From all this, we conclude that, and as stated and thought before, a
replication decision based on the nodes behaviours may significantly improve and
reduce the network overhead. The main idea reside in classifying nodes in two
categories. Those who are most suitable to stay for a long time in a geographical area
and those that not. The former would be the most suitable for storing replicas related
to the respective location.
4.2 Retrieval Module
Once a mobile application or another system has created a hovering information and
stored it in a geographical area, we must be able to retrieve this hoverinfo when
required. We distinguish two kinds of retrieval mechanisms: a passive one and an
active one. While in the active retrieval the user application asks for some
information, in the passive retrieval the informations looks for matching user
applications (publish/subscribe scheme). The answer message, if the query matches,
propagates following a unicast scheme. In this paper, we only cope with the active
retrieval.
We describe the active query propagation. Once a user application has asked for
some information, the respective node generates a query that will propagate in quest
of matching some replica stored in some node's buffer. The approach we present here
deploys is a mitigated and geographically bounded flooding when the query is in the
anchor area of the respective information. Otherwise, the query is propagated
following a geographical routing until it gets to the anchor area of the information and
then the previous method is triggered.
Each time a query arrives to a node, the nodes verifies whether the query has been
already received in which case the node drops the query. Otherwise, the node verifies
if the query matches any of the hoverinfos stored in its buffer to later send this
hoveringo back to the demanding node. If the query does not match any hoverinfo, it
propagates itself towards neighboring nodes. The decision of propagation is taken
following an uniform distribution and a threshold previously defined.
Once a query has found a node containing a replica matching the query, the node
sends back to the node source of the query an answer message with the respective
hoverinfo. To route the message back, the node sends an unicast message to the node
from where it received the query previously. Each node receiving this message
behaves in the same way until the message gets to the destination node. Another way
of sending back an answer without using the historic information is by only
performing a geographical routing.
5 Evaluation
We evaluated the behavior of the above the current storage and retrieval modules
82

under different scenarios by varying the number of nodes, the number of hovering
informations and the number of queries.
We performed simulations using the OMNet++ network simulator (distribution
3.3) and its Mobility Framework 2.0p2 (mobility module) to simulate nodes having a
simplified WiFi-enabled communication interfaces (not dealing with channel
interferences) with a communication two different communication ranges of 30m and
120m. Concerning the mobility module, an update interval of 1s and a window time
of 10s has been used.
5.1 Simulation Settings and Scenarios
The generic scenario consists of a surface of 500m x 500m with mobile nodes moving
around following a Random Way Point mobility model with a speed varying from
1m/s to 10m/s without pause time, or following a Real Mobility Pattern after the
SLAW model 15.
In the generic scenario, pieces of hovering information have an anchor radius (r)
of 50m, a safe radius (r
safe
) of 30m, a risk radius (r
risk
) of 70m, a relevance
(meaningful) radius (r
rel
) of 200m, and a replication factor of 4 (k
R
).
Each node triggers the replication algorithm every 10 seconds (T
R
) and the
cleaning algorithm every 60 seconds (T
C
). Each node has a buffer capacity of up to 20
different replicas. The caching algorithm is constantly listening for the arrival of new
replicas.
Based on this generic scenario, we defined specific scenarios with varying number
of nodes: from 20 to 200 nodes, increasing the number of nodes by 20; varying
number of different pieces of hovering information existing in the system: from 20 to
200 hoverinfos, increasing the number of pieces by 20; and by producing 5 queries
per hoverinfo created. Each of this scenarios has been investigated with different
replication algorithms and the LBC caching policy.
We have performed 10 runs for each of the above scenarios. One run lasts 3'600
simulated seconds. All the results presented here are the average of the 10 runs for
each scenario, and the errors bars represent a 95% confidence interval. All the
simulations ran on a Linux cluster of 32 computation nodes (Sun V60x dual Intel
Xeon 2.8GHz, 2Gb RAM).
5.2 Critical Mass
Figure 5 outlines the average availability of the AP and BB replication algorithms
combined with the LBC caching policy. An average availability value has been
computed for several scenarios containing each a different number of nodes.
We can observe that as expected the BB algorithm has in all the cases an average
availability bigger than that of the AP algorithm. However, for this latest, we note an
strange behaviour in comparison to previous results 1314, the availability does not
keep growing as the number of nodes increases but it starts decreasing after 80 nodes.
There are two issues for these results: either they are incorrect and the whole
simulations should be verified, or any some missing detail is missing and they are
correct. In the latest case, the critical mass which is defined as the minimal number of
83
nodes per area unit so that some acceptable level of availability can be reached (this
threshold depends on the user-application but for the moment we assume that an
acceptable one should bigger than 90%) would be around 100 nodes for the BB
algorithm, and there would not exist for the AP algorithm since average availability is
lower than 80%.
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
20 40 60 80 100 120 140 160 180 20
0
Average Availability
Number of Nodes
BB + LBC
AP + LBC
Fig. 5. Availability.
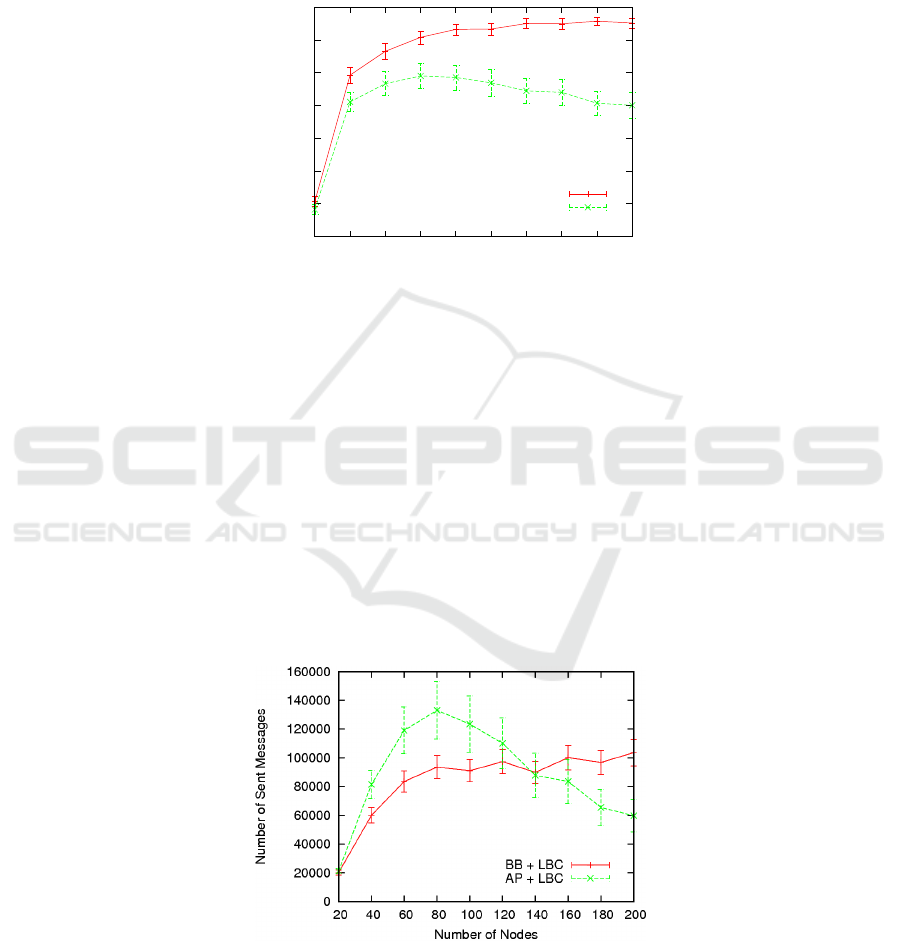
5.3 Network Overhead
Figure 6 depicts the number of sent messages for both the AP and the BB replications
algorithms under several scenarios, each having a different number of nodes.
Again, in comparison to the results of the critical mass, we observe an strange
behaviour for the AP algorithm. The number of sent messages is bigger than that of
the BB for the range 20 to 140 nodes, and it starts decreasing after 80 nodes. These
results are also incompatible with those of previous works 1314.
We define the network overhead as the number of messages exchanged between
nodes per unit of time. One goal of storage and retrieval algorithms is to minimize
this variable while maximizing the storage/retrieval performances. However, since
our results seem to be biased, we can not conclude anything for the moment than
verifying current results.
Fig. 6. Sent Messages.
84
5.4 Absorption Limits
Figure 7 shows the average availability for both the AP and the BB replications
algorithms under several scenarios each having a different number of hovering
informations but always either 100 or 200 nodes.
A hovering information system has limits. We can not store information as much
as we want because of some inherent limitations: the whole storage capacity which is
defined as a function of the number of nodes and the buffer size at each node.
However, this absorption limit is below of this theoretical limit because of the
redundancy of replicas.
The results of this paragraph shows that and absorption limit is reached for the BB
because we can observe that the number of hoverinfos created in the system is not
bigger than 120 hoverinfos. We can explain this results by the fact that nodes' buffer
have a limit of 20 hoverinfos and that at some point they get full and no more
hoverinfos are accepted. In the other hand, for the AP algorithm, we observe that a
bigger amount of hoverinfos is absorbed by the system. However, these results should
be verified because of the strange behaviour of the AP algorithms noticed in previous
sub-sections.
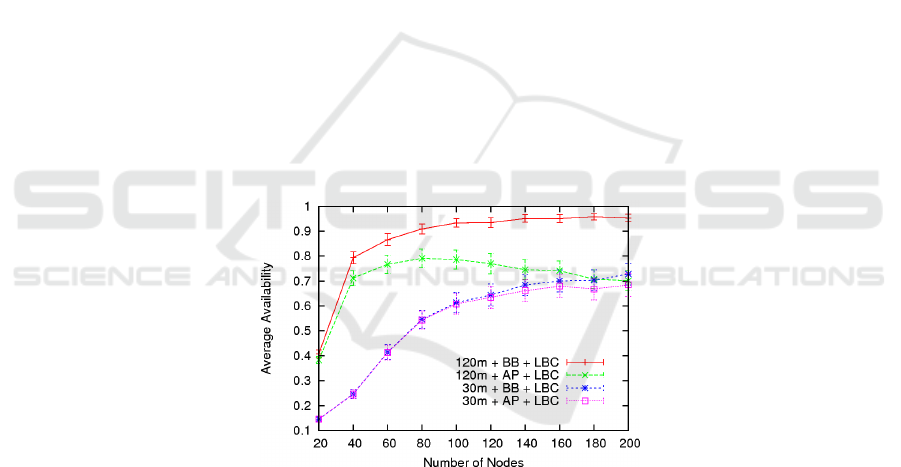
5.5 Communication Range
Figure 8 depicts the average availability for both the AP and the BB replications
algorithms under several scenarios having as main difference the communication
range: 30m and 120m.
Fig. 7. Availabity and Communication Range.
We observe that as expected the availability is lower for a communication range
of 30m. However, and in opposition to previous sub-sections, we notice that the
behaviour of the AP in a configuration of 30m is more reliable and consistent with
what has been expected and what has been found in previous works 1314. This fact
leads us to think about the correctness of the results for 120m of communication
range.
85
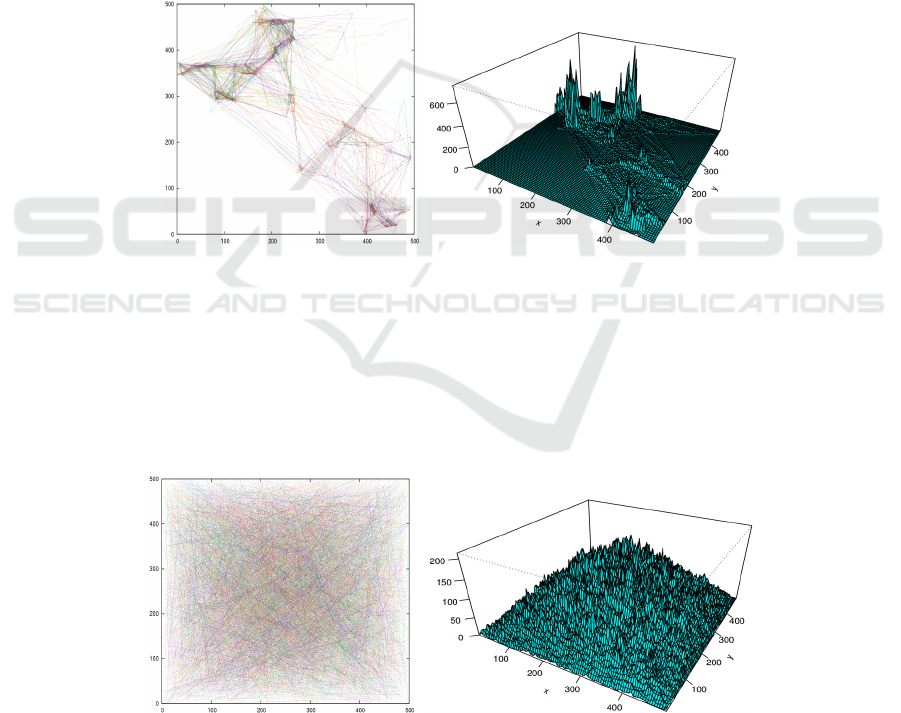
5.6 Real Mobility Patterns Scenarios
The previous results have studied the behaviour of hovering information middleware
under an hypothetical scenarios on which every node moves randomly. This is quite
rare to happen in reality, unless we consider a market or festival where we could
observe a more chaotic behaviour in the movement of people. Therefore a set of
simulations has been performed using real mobility traces or more precisely pseudo
real mobility patterns, which have been generated by the SLAW mobility model 15.
Several scenarios have been defined each having different density of people
moving around. Figure 9 presents a mobility trace of 200 nodes moving after the
SLAW model, and an histogram of the locations by where nodes pass through. We
can clearly observe, from both the trace and the histogram, that there are between 4
and 6 hotspots which could be considered as points of concentration of people. For
instance in a real situation, these focal points might be considered as the main
building of a university campus.
Fig. 8. Trace and histogram for SLAW real mobility model.
Figure 10 depicts the trace and histogram of 200 nodes moving after a random-
way-point mobility pattern which has been extensively used during this technical
report and previous works. We can notice that nodes have the tendency to pass more
time in the middle of the area rather than in the sides. We can conclude from this that
hoverinfos being in the middle will have more chances of surviving than those being
created in the sides of the area. In the case of the real mobility patterns, the similar
reasoning could be applied to the focal points.
Fig. 9. Trace and histogram for random-way-point mobility model.
86
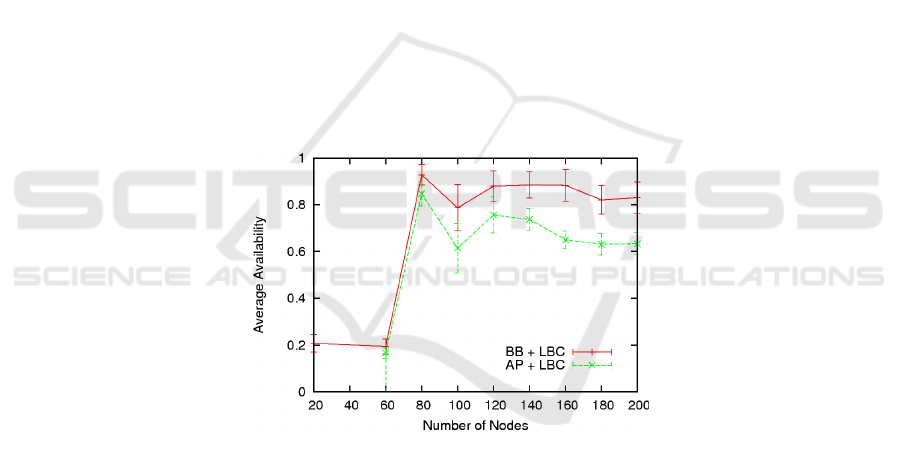
Figure 11 outlines the average availability for the AP and the BB replication
algorithms under several scenarios having different number of nodes, which move
after the SLAW real mobility model. We observe that for more than 80 nodes, the
average availability for both algorithms is bigger than 60%, and for the BB algorithms
is bigger than 80% which is not probably an acceptable value but it is not bad. For
less than 80 nodes results are bad or strange, again further verifications and
improvements have to be done.
6 Conclusions
In this technical report, we have described the Spatial Memory vision which defines
any geographical region as a memory being able to store and retrieve any kind of
information. We have also presented the Hovering Information concept re-engineered
as a middleware implementing a constrained version of the spatial memory concept.
We have defined the API and the architecture of the Hovering Information
Middleware, and described its properties. We have notably discussed about the
current state and the major drawbacks of the Storage Module's replications
algorithms, the Attractor Point (AP) and the Broadcast-based (BB), which were
introduced in previous works. We have also introduced the Retrieval Module which
for the moment implements a basic version of queries propagation, matching, and
responses propagation back in a very simple way.
Fig. 10. Real Mobility Patterns – Availability.
We have run a set of several simulations using random-way-point mobility model
and SLAW real mobility model. However, some results are strange and further
verification is required, maily for the AP algorithm. In what concerns real mobility
patterns, results are encouraging because of the quite high performances for the BB
replication algorithm.
It is clear that some improvements are needed in the storage and retrieval
algorithms. One of them, and most probably the most interesting one, goes by
adapting the behaviour of the algorithms to the daily behaviour of nodes, for instance
to the nodes' mobility routines.
87

References
1. D. J. Corbet and D. Cutting. Ad loc: Location-based infrastructure-free annotation. In
ICMU 2006, London, England, Oct. 2006.
2. L. Courts, M.-O. Killijian, D. Powell, and M. Roy. Sauvegarde cooprative entre pairs pour
dispositifs mobiles. In UbiMob ’05: Proceedings of the 2nd French-speaking conference on
Mobility and uibquity computing, pages 97–104, New York, NY, USA, 2005. ACM Press.
3. G. Di Marzo Serugendo, A. Villalba, and D. Konstantas. Dependable requirements for
hovering information. In Supplemental Volume - The 37th Annual IEEE/IFIP International
Conference on Dependable Systems and Networks (DSN’07), pages 36–39, 2007.
4. S. Dolev, S. Gilbert, L. Lahiani, N. A. Lynch, and T. Nolte. Timed virtual stationary
automata for mobile networks. In OPODIS, pages 130–145, 2005.
5. S. Dolev, S. Gilbert, N. A. Lynch, E. Schiller, A. A. Shvart sman, and J. L. Welch. Virtual
mobile nodes for mobile ad hoc networks. In DISC, 2004.
6. S. Dolev, S. Gilbert, N. A. Lynch, A. A. Shvartsman, and J. Welch. Geoquorums:
Implementing atomic memory in mobile ad hoc networks. In DISC, 2003. .
7. S. Dolev, S. Gilbert, E. Schiller, A. A. Shvartsman, and J. Welch. Autonomous virtual
mobile nodes. In DIALM-POMC ’05: Proceedings of the 2005 joint workshop on
Foundations of mobile computing, pages 62–69, New York, NY, USA, 2005. ACM Press.
8. M.-O. Killijian, D. Powell, M. Banâtre, P. Couderc, and Y. Roudier. Collaborative backup
for dependable mobile applications. In MPAC ’04: Proceedings of the 2nd workshop on
Middleware for pervasive and ad-hoc computing, pages 146–149, New York, NY, USA,
2004. ACM Press.
9. I. Leontiadis and C. Mascolo. Geopps: Opportunistic geographical routing for vehicular
networks. In Proceedings of the IEEE Workshop on Autonomic and Opportunistic
Communications. (Colocated with WOWMOM07), Helsinki, Finland, June 2007. IEEE
Press.
10. I. Leontiadis and C. Mascolo. Opportunistic spatio-temporal dissemination system for
vehicular networks. In MobiOpp ’07: Proceedings of the 1st international MobiSys
workshop on Mobile opportunistic networking, pages 39–46, New York, NY, USA, 2007.
ACM Press.
11. M. Motani, V. Srinivasan, and P. S. Nuggehalli. Peoplenet: engineering a wireless virtual
social network. In MobiCom ’05: Proceedings of the 11th annual international conference
on Mobile computing and networking, pages 243–257, New York, NY, USA, 2005. ACM
Press.
12. A. Villalba and D. Konstantas. Towards hovering information. In Proceedings of the First
European Conference on Smart Sensing and Context (EuroSSC 2006), pages 161–166,
2006.
13. A. Villalba Castro, G. Di Marzo Serugendo, and D. Konstantas. Hovering information -
self-organising information that finds its own storage. In IEEE International Conference on
Sensors, Ubiquitous and Trust Computing (SUTC’08), 2008
14. A. Villalba Castro, G. Di Marzo Serugendo, D. Konstantas, Hovering Information -
Infrastructure-Free Self-Organising Location-Aware Information Dissemination Service,
2nd ERCIM Workshop on eMobility in conjuntion with WWIC 2008, May 2008.
15. Kyunghan Lee, Seongik Hong, Aeong J. Kim, Injong Rhee, Song Chong, SLAW: A
Mobility Model for Human Walks, In Proceedings of the 28
th
Annual Joint Conference of
the IEEE Computer and Communications Societies (INFOCOM), April 2009.
88
