
A COMPUTATIONAL MODEL FOR CONSCIOUS VISUAL
PERCEPTION AND FIGURE/GROUND SEPARATION
Marc Ebner
Eberhard-Karls-Universit¨at T¨ubingen, Wilhelm-Schickard-Institut f¨ur Informatik
Abt. Rechnerarchitektur, Sand 1, 72076 T¨ubingen, Germany
Stuart Hameroff
Departments of Anesthesiology and Psychology and Center for Consciousness Studies, The University of Arizona
Tucson, Arizona 85724, U.S.A.
Keywords:
Figure/ground segmentation, Spiking neurons, Consciousness, Gamma-oscillation, Lateral-coupling, Gap-
junctions.
Abstract:
The human brain is able to perform a number feats that researchers have not been able to replicate in artificial
systems. Unsolved questions include: Why are we conscious and how do we process visual information from
the input stimulus right down to the individual action. We have created a computational model of visual
information processing. A network of spiking neurons, a single layer, is simulated. This layer processes visual
information from a virtual retina. In contrast to the standard integrate and fire behavior of biological neurons,
we focus on lateral connections between neurons of the same layer. We assume that neurons performing the
same function are laterally connected through gap junctions. These lateral connections allow the neurons
responding to the same stimulus to synchronize their firing behavior. The lateral connections also enable the
neurons to perform figure/ground separation. Even though we describe our model in the context of visual
information processing, it is clear that the methods described, can be applied to other kinds of information,
e.g. auditory.
1 MOTIVATION
To fully understand how cognitive information pro-
cessing works, we will have to replicate all essential
functions of the brain either in simulation or by build-
ing an artificial artifact. Only if we are able to build
an artificial entity, which is able to perform similar
tasks as the human brain, then we have understood
how the brain actually works. Sensory perception,
motor control and learning are assumed to be a result
of the neural processing occurring inside the brain.
It is assumed that the processing occurs through so
called integrate-and-fire neurons. Such neurons in-
tegrate the electrical inputs received through axons
from other neurons. Once the activation of a neu-
ron reaches a certain threshold, then it fires. It itself
sends an electrical impulse along its axon. An essen-
tial marker of consciousness cognition is the synchro-
nized electrical activity of neurons inside a particu-
lar frequency band (30 to 90 Hz) of the electroen-
cephalogram (EEG), called gamma synchrony EEG
(Gray and Singer, 1989; Ribary et al., 1991). (Singer,
1999) gives a review on how gamma synchrony cor-
relates with perception and motor control. Gamma
synchrony is mediated largely by inter dendritic gap
junctions. According to the Hameroff ‘conscious pi-
lot’ model (Hameroff, 2010), synchronized zones of
activation move through the brain as gap junctions
open and close. The synchronized zones convert non-
conscious cognition, i.e. cognition on auto-pilot, to
consciousness.
(Kouider, 2009) has reviewed several different
neurobiological theories of consciousness. Many
seemingly different theories of consciousness (e.g.
Tononi and Edelman’s reentrant dynamic core hy-
pothesis (Tononi and Edelman, 1998) or Lamme’s lo-
cal recurrence theory (Lamme, 2006) assume recur-
rent processing of information. (Zeki, 2007) has put
forward the microconsciousness theory. He suggests
that multiple consciousnesses are distributed across
processing sites and that attributes such as color, form
or motion are eventually bound together giving rise to
112
Ebner M. and Hameroff S..
A COMPUTATIONAL MODEL FOR CONSCIOUS VISUAL PERCEPTION AND FIGURE/GROUND SEPARATION.
DOI: 10.5220/0003123201120118
In Proceedings of the International Conference on Bio-inspired Systems and Signal Processing (BIOSIGNALS-2011), pages 112-118
ISBN: 978-989-8425-35-5
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

macroconsciousness possibly also involving linguis-
tic and communication skills which would then be a
unified form of consciousness.
With this contribution we focus on Zeki’s micro-
consciousness using recurrent information process-
ing. We present a theoretical model on how a sheet
of neurons interacts laterally through gap junctions to
perceive and represent a visual scene. Even though
we only show results for the processing of visual in-
formation, the same method can also be used to per-
ceive auditory or haptic information. In our model,
neurons are connected laterally throughgap junctions.
We assume that within a sheet of neurons, neurons
with a similar function are connected through such
gap junctions. Completely unrelated functions are not
connected through gap junctions. We model a single
sheet of laterally connected neurons processing visual
input from a virtual retina using real scenes as input.
The interconnected neurons are assumed to form
a resistive grid which is used to temporally and spa-
tially average the out-going spikes. The spatial av-
erage of the out-going signal is used as a feedback
signal which determines whether the gap junctions
between two adjacent neurons open or close. Gap
junctions open if the temporal average of the neu-
ron’s input is above the spatial average of the aver-
aged output, otherwise they close. This enables the
set of neurons to perform figure/ground separation. If
a gap junction between two adjacent neurons is open,
then these neurons synchronize their firing behavior.
Thus, eventually all of the neurons receiving input
from the “figure” will fire in synchrony. We show
how this works by presenting the sheet of neurons dif-
ferent photographs. The virtual retina gazes at these
photographs. As the object moves across the retina,
the object is extracted and tracked by a zone of syn-
chronized activity.
Our model only requires local connections be-
tween neurons. Global connections are not required.
Local connections have also been used by (Wang,
1995) and (K¨onig and Schillen, 1991) to establish
synchronous firing. Our model uses different firing
rates of segmented regions to distinguish between dif-
ferent objects, i.e. neurons of regions of different
sizes will be synchronized within a region but desyn-
chronized across regions. (Terman and Wang, 1995)
achieve desynchronization between different objects
using a global inhibitor while (Schillen and K¨onig,
1991) use long range excitatory delay connections.
(Zhao and Breve, 2008) have used chaotic oscillators
for scene segmentation. They segmented static input.
They worked with Wilson-Cowan neural oscillators
(Wilson and Cowan, 1972). In their model, neurons
which respond to the same object synchronize their
behavior while neurons responding to a different ob-
ject are in another chaotic orbit. (Eckhorn et al., 1990)
have simulated two one-dimensional layers of neu-
rons simulating results from cat visual cortex. They
also performed experiments with a moving stimulus.
However, they used long range feeding connections
between neurons of the same layer.
Our model is quite simple and shows how the syn-
chronized zones of activity, the neural correlate of
consciousness, arise and how they move around in a
sheet of neurons. In the brain, similar synchronized
zones of activity correlate with conscious perception
and control.
2 COMPUTATIONAL MODELING
Traditionally, only the spiking behavior of neurons
is modeled. The spiking behavior is assumed to be
the most relevant aspect of the neuron’s function. If
this is indeed the case, then the function of a neuron
can be replicated by only modeling the spiking be-
havior. Other aspects, such as interactions at the level
of neuro transmitters and ion channels are assumed to
be not relevant and can be omitted in the computa-
tional modeling. Eventually, large scale modeling of
all of the brain’s neurons may lead to a better under-
standing of how the brain functions (Izhikevich and
Edelman, 2008). The neuron is viewed as a functional
unit which integrates the input, and once a particular
threshold is reached, the neuron fires. This is the stan-
dard integrate and fire model (Gerstner and Kistler,
2002).
The input is received from axons of other neu-
rons. A voltage spike train travels along the axons.
This signal is received through the dendrites of a neu-
ron (and also the cell body/soma). The signal is inte-
grated over time, building up the so called activation
potential of the neuron. Once the activation potential
is high enough, i.e. above the firing-threshold, then
the neuron itself will fire. A spike is sent down along
the axon. This signal will then be received by other
neurons where the process continues.
The change of the activation potential V
i
of neu-
ron i is described by the followingequation (Thivierge
and Cisek, 2008)
τ
dV
i
dt
= −g
i
(V
i
− E
i
) + I
tonic
+ I
i
+
N
∑
j=1
w
ij
K
j
(1)
where τ is a time constant. Without any input, the cell
activation potential will slowly decay and eventually
reach the resting potential E
i
. The factor g
i
is the leak-
age conductance, i.e. the speed of the decay. An input
current from an external source can be modeled using
A COMPUTATIONAL MODEL FOR CONSCIOUS VISUAL PERCEPTION AND FIGURE/GROUND SEPARATION
113

the term I
i
. A tonic current can be specified through
I
tonic
. The input from other neurons K
j
is weighted
through factors w
ij
which describe the strength be-
tween the neurons i and j. This standard model lacks
an important ingredient: lateral connections between
neurons. Such lateral connections will allow a set of
neurons to perform figure/ground segmentation. They
will also cause neurons responding to the same object
to synchronize their firing behavior.
3 NEURON WITH LATERAL
CONNECTIONS
In our model, the neuron performs a temporal integra-
tion of the incoming spikes. The activation of the neu-
ron rises until a particular threshold is met. Once the
threshold is met, the neuron fires. This is exactly the
traditional integrate-and-fire-model. Extending the
standard model, a neuron is connected to nearby neu-
rons performing a similar function through gap junc-
tions. The connected neurons form a resistive grid
because each gap junction can be modeled as a resis-
tor (Herault, 1996; Veruki and Hartveit, 2002). This
connection between two neurons, i.e. the resistor, is
always there. It is an unconditional connection. How-
ever, a gap junction may also be in one of two states:
open or closed. Which state is chosen is voltage de-
pendent. (Traub et al., 2001) have also used a volt-
age dependent conductance of gap junctions in their
simulations. If a gap junction is open, then an addi-
tional resistive connection is created between the two
neurons allowing for the connected neurons to col-
lectively integrate their input. Because of this condi-
tional resistive coupling, connected neurons synchro-
nize their firing behavior. They fire in synchrony, i.e.
we obtain the so called gamma synchrony. The neu-
rons synchronize in the same way that chaotic or non-
linear electrical circuits synchronize if a signal is ex-
changed between them (Carroll and Pecora, 1991; ?;
Volos et al., 2008).
The output spikes of the neuron are temporally in-
tegrated and spatially averaged because of the resis-
tive grid. The spatially averaged output forms a feed-
back signal. This feedback signal is used to deter-
mine whether gap junctions open or close. We call
this feedback signal the sync-threshold. If the tempo-
ral average of the neuron’s output is above the sync-
threshold, then its gap junctions open. If the tempo-
ral average of the neuron’s output is below the sync-
threshold, then the gap junctions close.
Figure 1 shows our model of a neuron with lat-
eral connections. The neuron illustrates the different
functional components. The temporal averaging (in-
of output
axon
spike
thresholding
resistive coupling
spatial averaging
temporal averaging
generation
unconditional
to nearby neuron
of output
conditional
resistive coupling
to nearby neuron
temporal
integration
of input
dendrites
sync−threshold
gap junction mode:
open or closed
of input
spatial averaging
Figure 1: Artificial neuron. Each neuron is laterally con-
nected to other neurons (via gap junctions) which perform
a similar function.
dicated by the box “
R
dt”) occurs first. The spines
extending laterally to nearby neurons illustrate lateral
connections caused by gap junctions. In the illus-
tration, we have connections to four other neurons.
It is of course clear that these connections are not
necessarily uniformly distributed in an actual neuron.
For the biological neuron, the gap junctions are ac-
tually found between dendrites of neighboring neu-
rons. The darker lateral connections (see Figure 1)
form the conditional resistive grid which can be in
one of two states: open or closed. These connections
cause connected neurons to fire in synchrony (indi-
cated by the box “
R
dx”). If the neuron activation is
sufficiently high (indicated by the “Threshold”-box),
then the neuron fires (indicated by the box with the
spike), sending a spike down the axon. The outgo-
ing spikes are temporally integrated (indicated by the
upper “
R
dt”-box). This signal is also spatially inte-
grated (indicated by the outer circular ring). If this
spatially integrated signal is above the temporally in-
tegrated signal, then the gap junctions open otherwise
they close. Even though the we model the behavior
just described using only a single neuron, it could be
that these functions are actually spread over multi-
ple neurons inside a cortical column. (Mountcastle,
1997) gives an excellent review of the columnar orga-
nization of the neocortex.
4 EXPERIMENT ON VISUAL
FIGURE/GROUND
SEPARATION
In order to test our model, we have created a virtual
retina to provide visual input to a simulated sheet of
1000 neurons. The neurons are randomly distributed
over a 100× 100× 10 area. Each neuron i receives in-
put from the corresponding position of the retina with
BIOSIGNALS 2011 - International Conference on Bio-inspired Systems and Signal Processing
114

a small random displacement. Let (x
i
,y
i
,z
i
) be the
position of the neuron. We assume coordinates to be
normalized to the range [0,1]. Then neuron i will re-
ceive its visual input from position (wx
i
+ x
r
,hy
i
+ y
r
)
where w and h are the width and height of the original
image in pixels and x
r
and y
r
are random offsets from
the range [−1,1]. The third dimension (z) is not really
required and the model would also work if we spread
out our sheet of neurons exactly on a two-dimensional
plane. However, biological neurons are assumed not
be perfectly positioned on a two-dimensional plane.
The processing that we simulate is assumed to
take place inside some higher area of the visual cor-
tex. It could take place in V1. However, accord-
ing to (Crick and Koch, 1995) humans do not ap-
pear to be aware of the processing occurring inside
V1. Thus, we assume that higher visual areas are in-
volved. Higher visual areas have to be involved any-
way if other features such as form or motion are used
(Zeki, 1978; Zeki, 1993).
The retinal receptors (cones) respond to light in
the red, green and blue parts of the spectrum (Dart-
nall et al., 1983). The visual stimulus is transformed
by the time it has reached the visual cortex by color
opponent and double-opponentcells. The visual stim-
ulus is processed inside a rotated coordinate sys-
tem where the three axes are: bright-dark, red-green,
and yellow-blue (Tov´ee, 1996). In our experiments,
we focus on the bright-dark stimulus, the lightness.
Lightness L is computed from R, G, B, non-linear
pixel intensities using (Poynton, 2003)
L = 0.299R+ 0.587G+ 0.114B. (2)
Figure 2 shows the algorithm that is run by each
neuron. Each neuron i is described by the follow-
ing state variables: activation a
i
, threshold t
i
, output
voltage o
i
, temporal average of out-going spikes ˜a
i
,
spatial average ¯a
i
of temporal average. The initial-
ization of these variables can actually be arbitrary as
the activation and the output voltage slowly decay to
zero. The parameters used by the algorithm are set
as follows: α
a
= 0.01 decay of the activation poten-
tial, α
o
= 0.5 decay of the output spiking voltage,
α
t
= 0.01 temporal averaging factor, α
s
= 0.0001 spa-
tial averaging factor, ε = 0.001 activation leakage to
adjacent neurons upon firing, γ = 0 reduction of fir-
ing threshold, ω = 1.999 factor for over-relaxation,
∆t
r
= 10 refractory period of neuron, N
s
number of
neurons in sub-network, w
ij
= 1 weight between neu-
rons i and j. For the experiments described here, we
have used positive unit weights. The weights can of
course in principle be positive or negative. Negative
weights would correspond to inhibitory signals which
reduce the input to a neuron. Using neural learning,
(01) o
i
= (1− α
o
)o
i
// decay of output
(02) a
i
= (1− α
a
)a
i
// decay of activation
(03) a
i
= a
i
+ α
a
∑
j
w
ij
o
j
// integrate input
(04) if Neuron i fired within ∆t
r
return
(05) N = { j|Neuron j is laterally connected to
(06) neuron i via open gap junction }
(07) a
′
= a
i
; n = 1 // initialize spatial averaging
(08) ∀ j ∈ N : if Neuron j did not fire within ∆t
r
(09) { a
′
= a
′
+ a
j
; n = n+ 1 }
(10) a
i
= a
′
/n // spatial averaging completed
(11) // distribute sp. avg to neighboring neurons
(12) ∀ j ∈ N : if Neuron j did not fire within ∆t
r
(13) { a
j
= a
i
; }
(14) a
i
= max[−1,a
i
] // limit activation
(15) t
i
= max[0,1 − γ · N
s
] // comp. fire-threshold
(16) if (a
i
> t
i
) {// does the neuron fire?
(17) a
i
= 0 // reset activation
(18) o
i
= 1− ε|N| // output rises to 1
(19) ∀ j ∈ N : a
j
= a
j
+ ε // distribute leakage
(20) }
(21) ˜a
i
= (1− α
t
) ˜a
i
+ α
t
o
i
// temporal average
(22) ¯a
′′
= ¯a
i
// save previous result
(23) ¯a
′
=
1
1+|N|
∑
j∈N
¯a
i
// compute spatial average
(24) ¯a
i
= (1− α
s
) ¯a
′
+ α
s
˜a
i
// add temp. average
(25) ¯a
i
= (1− ω) ¯a
′′
+ ω ¯a
i
// use over-relaxation
(26) if ( ˜a
i
> ¯a
i
) open gap junctions
(27) else close gap junctions
Figure 2: Algorithm run by each neuron i.
the weights can be dynamically tuned to a given prob-
lem. However, for our sample problem, we do not
require neural learning. The dendritic input of a sim-
ulated neuron j is the lightness L at the corresponding
position (x
j
,y
j
) of the virtual retina. Thus we have,
o
j
= L(x
j
,y
j
).
The neuron performs temporal integration of the
input and also spatial integration through the resis-
tive grid formed by laterally connected neurons. The
feedback signal of the output (again temporally in-
tegrated) performs an adaptive determination of the
threshold which can be used to separate figure from
ground. Since we use lightness as an input, areas
with high lightness correspond to the object and areas
with low lightness will correspond to the background.
Such a separation can of course also be achieved with
a standard integrate and fire neuron which is not lat-
erally connected to other neurons. However, in this
case, the response of the neuron will no longer be
adaptiveon the input. Because of the output feedback,
our grid of neurons is able to tune its response to the
available input. Instead of performing a bright-dark
separation, our model can also be used to perform a
separation with respect to color, motion or texture. In
A COMPUTATIONAL MODEL FOR CONSCIOUS VISUAL PERCEPTION AND FIGURE/GROUND SEPARATION
115
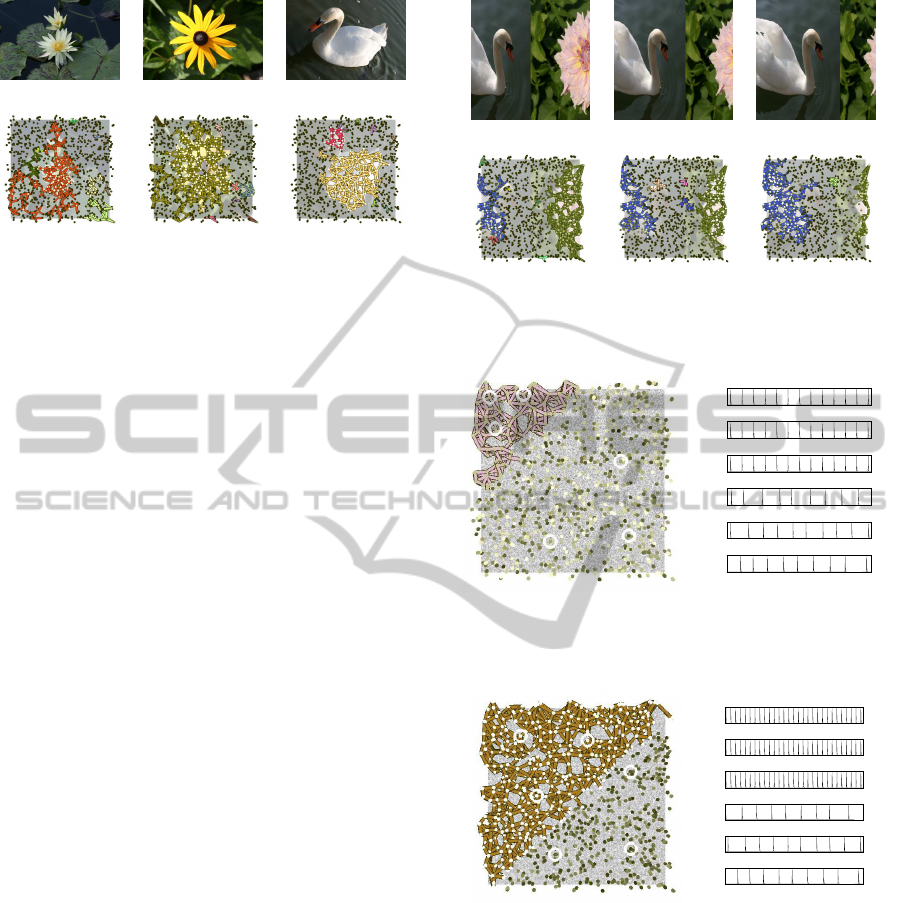
(a) (b) (c)
(d) (e) (f)
Figure 3: Figure/ground separation. (a)-(c) Input images.
(d)-(f) The sheet of neurons responds to input from a simu-
lated retina.
this case, the sheet of neurons would be located in an
area receiving input from V4 (color) or V5 (motion).
Or it could be used for adaptive thresholding of audi-
tory information.
The sheet of neurons receives input from the vir-
tual retina. A number of still images are moved across
the virtual retina. Figure 3(a)-(c) shows three of the
images that the retina was exposed to. The input im-
age is shown in the background. Each dot in the fore-
ground corresponds to a single neuron of our sheet of
neurons which receives input from the virtual retina.
The output of the sheet of neurons is shown in Fig-
ure 3(d)-(f) for the same three images. Open gap
junctions are drawn as colored lines between neu-
rons. All connections which belong to the same clus-
ter are drawn with the same color. This indicates syn-
chronous firing. The neurons responding to the “fig-
ure” have their gap junctions open. Thus, the figure
has been separated from the ground. Figure 4 shows
how the same sheet of neurons respond to a mov-
ing stimulus. Even though the object moves across
the retina, the same sub-network (as indicated by the
color of the sub-network) responds to the same stimu-
lus. Higher visual areas are able to process this stim-
ulus using visual servoing techniques (Chaumette and
Hutchinson, 2006; Chaumette and Hutchinson, 2007)
for behaviors such as grasping.
Figure 5 and Figure 6 shows the output of the
same sheet of neurons when the gap junctions of sev-
eral neurons were deliberately opened and a random
input was provided to the virtual retina. The neurons
located within the connected sub-network synchro-
nize their firing behavior. In order to demonstrate the
effect of the size of the sub-network on the firing fre-
quency, the parameter γ was set to 0.001. Hence, the
firing frequency depends on the size of the connected
sub-network. This can be seen when comparing the
spiking frequencies of neurons (b), (c), (d) shown in
Figure 5 and Figure 6. Neurons from the connected
(a) (b) (c)
(d) (e) (f)
Figure 4: Response to moving stimulus. The connected
sub-network follows the object.
V
s
V
s
V
s
V
s
V
s
(a)
V
s
(g)
(d)
(e)
(f)
(b)
(c)
Figure 5: (a) random input stimulus. (b-d) synchronous fir-
ing behavior of 3 neurons from the upper left area. (e-g)
asynchronous firing of 3 neurons with closed gap junctions.
V
s
V
s
V
s
V
s
V
s
(a)
V
s
(g)
(d)
(e)
(f)
(b)
(c)
Figure 6: (a) random input stimulus. (b-d) synchronous fir-
ing behavior of 3 neurons from the upper left area. (e-g)
asynchronous firing of 3 neurons with closed gap junctions.
sub-network shown in Figure 5 have a smaller fir-
ing frequency because the size of the sub-network
is smaller compared to the size of the sub-network
shown in Figure 6. Neurons from the connected sub-
network shown in Figure 6 have a higher firing fre-
quency. The difference in the firing frequency can be
used to discern different objects by higher visual ar-
eas.
BIOSIGNALS 2011 - International Conference on Bio-inspired Systems and Signal Processing
116

5 CONCLUSIONS
In standard neural modeling, neurons are assumed to
show an integrate-and-fire-behavior. We have devel-
oped a computer simulation which also takes lateral
connections between neurons into account. Neurons
having the same function, i.e. neurons responding to
input in the same way, are assumed to be laterally con-
nected through gap junctions. The neurons integrate
their input. If this activation of the neuron is large
enough, then the neuron fires. The generated spike
train of the neuron is temporally and spatially inte-
grated. If the temporal average of the output is above
the average spatial average, then the neuron opens its
gap junctions to nearby neurons. Once this happens,
then the connected neurons synchronize their firing
behavior. This is a marker of consciousness. We
have shown how a virtual sheet of neurons responds
to visual input on a simulated retina segmenting fig-
ure from ground. Higher brain areas can use this data
for behaviors such as reaching or grasping.
REFERENCES
Carroll, T. L. and Pecora, L. M. (1991). Synchronizing
chaotic circuits. IEEE Trans. on Circuits and Systems,
38(4):453–456.
Chaumette, F. and Hutchinson, S. (2006). Visual servo con-
trol part I: Basic approaches. IEEE Robotics & Au-
tomation Magazine, 13(4):82–90.
Chaumette, F. and Hutchinson, S. (2007). Visual servo con-
trol part II: Advanced approaches. IEEE Robotics &
Automation Magazine, 14(1):109–118.
Crick, F. and Koch, C. (1995). Are we aware of neural
activity in primary visual cortex? Nature, 375:121–
123.
Dartnall, H. J. A., Bowmaker, J. K., and Mollon, J. D.
(1983). Human visual pigments: microspectrophoto-
metric results from the eyes of seven persons. Proc.
R. Soc. Lond. B, 220:115–130.
Eckhorn, R., Reitboeck, H. J., Arndt, M., and Dicke, P.
(1990). Feature linking via synchronization among
distributed assemblies: Simulations of results from cat
visual cortex. Neural Comput., 2:293–307.
Gerstner, W. and Kistler, W. (2002). Spiking Neuron Mod-
els. Cambridge University Press, Cambridge, UK.
Gray, C. M. and Singer, W. (1989). Stimulus-specific neu-
ronal oscillations in orientation columns of cat visual
cortex. PNAS, 86:1698–1702.
Hameroff, S. (2010). The “conscious pilot” – dendritic syn-
chrony moves through the brain to mediate conscious-
ness. Journal of Biological Physics, 36:71–93.
Herault, J. (1996). A model of colour processing in the
retina of vertebrates: From photoreceptors to colour
opposition and colour constancy phenomena. Neuro-
computing, 12:113–129.
Izhikevich, E. M. and Edelman, G. M. (2008). Large-scale
model of mammalian thalamocortical systems. PNAS,
105(9):3593–3598.
K¨onig, P. and Schillen, T. B. (1991). Stimulus-dependent
assembly formation of oscillatory responses: I. syn-
chronization. Neural Comput., 3:155–166.
Kouider, S. (2009). Neurobiological theories of conscious-
ness. In Banks, W. P., editor, Encyclopedia of Con-
sciousness, pages 87–100. Elsevier.
Lamme, V. A. F. (2006). Towards a true neural stance
on consciousness. Trends in Cognitive Sciences,
10(11):494–501.
Mountcastle, V. B. (1997). The columnar organization of
the neocortex. Brain, 120:701–722.
Pecora, L. M. and Carroll, T. L. (1990). Synchronization in
chaotic systems. Phys. Rev. Lett., 64(8):821–824.
Poynton, C. (2003). Digital Video and HDTV. Algorithms
and Interfaces. Morgan Kaufmann Publishers.
Ribary, U., Ioannides, A. A., Singh, K. D., Hasson, R.,
Bolton, J. P. R., Lado, F., Mogilner, A., and Llin´as,
R. (1991). Magnetic field tomography of coherent
thalamocortical 40-hz oscillations. PNAS, 88:11037–
11041.
Schillen, T. B. and K¨onig, P. (1991). Stimulus-dependent
assembly formation of oscillatory responses: II.
desynchronization. Neural Comput., 3:167–178.
Singer, W. (1999). Neuronal synchrony: A versatile code
for the definition of relations? Neuron, 24:49–65.
Terman, D. and Wang, D. (1995). Global competition and
local cooperation in a network of neural oscillators.
Physica D, 81:148–176.
Thivierge, J.-P. and Cisek, P. (2008). Nonperiodic synchro-
nization in heterogeneous networks of spiking neu-
rons. The Journal of Neuroscience, 28(32):7968–
7978.
Tononi, G. and Edelman, G. M. (1998). Consciousness and
complexity. Science, 282:1846–1851.
Tov´ee, M. J. (1996). An introduction to the visual system.
Cambridge University Press, Cambridge.
Traub, R. D., Kopell, N., Bibbig, A., Buhl, E. H., LeBeau, F.
E. N., and Whittington, M. A. (2001). Gap junctions
between interneuron dendrites can enhance synchrony
of gamma oscillations in distributed networks. The
Journal of Neuroscience, 21(23):9478–9486.
Veruki, M. L. and Hartveit, E. (2002). All (rod) amacrine
cells form a network of electrically coupled interneu-
rons in the mammalian retina. Neuron, 33:935–946.
Volos, C. K., Kyprianidis, I. M., and Stouboulos, I. N.
(2008). Experimental synchronization of two resis-
tively coupled Duffing-type circuits. Nonlinear Phe-
nomena in Complex Systems, 11(2):187–192.
Wang, D. (1995). Emergent synchrony in locally coupled
neural oscillators. IEEE Trans. on Neural Networks,
6(4):941–948.
A COMPUTATIONAL MODEL FOR CONSCIOUS VISUAL PERCEPTION AND FIGURE/GROUND SEPARATION
117

Wilson, H. R. and Cowan, J. D. (1972). Excitatory and in-
hibitory interactions in localized populations of model
neurons. Biophysical Journal, 12:1–24.
Zeki, S. (1993). A Vision of the Brain. Blackwell Science,
Oxford.
Zeki, S. (2007). A theory of micro-consciousness. In Vel-
mans, M. and Schneider, S., editors, The Blackwell
companion to consciousness, pages 580–588, Malden,
MA. Blackwell Publishing.
Zeki, S. M. (1978). Review article: Functional specialisa-
tion in the visual cortex of the rhesus monkey. Nature,
274:423–428.
Zhao, L. and Breve, F. A. (2008). Chaotic synchronization
in 2D lattice for scene segmentation. Neurocomput-
ing, 71:2761–2771.
BIOSIGNALS 2011 - International Conference on Bio-inspired Systems and Signal Processing
118
