
A COST-EFFECTIVE INDOOR VIBROTACTILE NAVIGATION
SYSTEM FOR THE BLIND
Marco Altini, Elisabetta Farella, Marco Pirini and Luca Benini
DEIS – Department of Electronics, Computer Sciences and Systems, University of Bologna, Bologna, Italy
Keywords: Localization, Navigation, EEG, Bluetooth, Vibrotactile.
Abstract: This paper describes the development of an indoor vibrotactile navigation system for the visually impaired
people. We aimed at realizing a wearable, low-cost, and effective system able to help blind users in
unknown indoor environments that they might visit occasionally, such as hospitals, airports, museums, etc.
The designed system implements a Bluetooth (BT) localization service, and provides wayfinding cues to the
user by means of a wearable device equipped with five motors. The last part of our work describes early
results obtained by the use of electroencephalographic (EEG) analysis to evaluate the vibrotactile feedback.
1 INTRODUCTION
Navigation, in general, involves providing
directional information to the user during a travel
with respect to the intended route and the desired
destination. People with visual deficits can be
challenged by planning and performing navigation
because of the reduced amount of information that
they can perceive from the surrounding. Regarding
navigation and wayfinding systems, the use of
vibrotactile displays has several advantages over
vocal messages. First of all they are less intrusive.
Although tactile and vibrotactile displays can often
offer a limited amount of information, they are less
invasive and do not risk to distract the blind person
from unexpected events, or more important tasks,
such as orientation. Since there is no standard
system for indoor localization (compared to the well
known Global Positioning System used in outdoor
environments), many technologies can be employed.
Among the possible choices BT is a cost-effective,
widespread and standard technology. In this context,
this work presents an indoor navigation system
based on vibro-tactile feedback and BT localization.
Wayfinding cues are provided to the user by use of
coded vibro-tactile messages, occurring in the case
the user should change its direction of movement.
Employing high sensitivity areas, such as shoulders
and the stern, we can reach perfect stimulus
detection while maintaining power consumption
level low and adequate to the expected lifetime of
the system. The last phase addressed in this work is
an early validation of the system. We first performed
traditional assessment by use of questionnaires on a
group of subjects. However, we are also interested in
determining the effectiveness both of the vibrotactile
actuator and of the particular kind of feedback
provided, without involving the subjective
perception of the user. Therefore, we explored use of
EEG to analyze and quantitatively assess effects of
the vibrotactile stimulation. Even if we describe very
early tests and methodology, the use of EEG
analysis seems promising and can be further used to
compare different kinds of vibrotactile actuators.
The paper is organized as follows. An overview of
the existing solutions for indoor and vibrotactile
navigation is given in Section 2. In Section 3 the
system architecture is explained. Section 4 describes
briefly the localization system while Section 5
concerns the vibrotactile system. Experimental
results are given in Section 6 whereas Section 7
deals with preliminary studies on EEG analysis.
Conclusions can be found in Section 8.
2 RELATED WORK
Several navigation systems have been proposed over
the last years, each of them employs one or more of
the following modality to provide information to the
user: video, audio or tactile. Targeting the
development of an aid for visually impaired people
the focus is narrowed to audio and tactile feedback.
Wayfinding is aimed at helping the blind in reaching
a destination within a building. The investigation of
how to support this task has not yet standard
477
Altini M., Farella E., Pirini M. and Benini L..
A COST-EFFECTIVE INDOOR VIBROTACTILE NAVIGATION SYSTEM FOR THE BLIND.
DOI: 10.5220/0003127504770481
In Proceedings of the International Conference on Health Informatics (HEALTHINF-2011), pages 477-481
ISBN: 978-989-8425-34-8
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

solutions in indoor environments. Technologies for
indoor navigation still require to be tuned to achieve
satisfying results. We focused our effort in
addressing the problem of supporting navigation in
indoor spaces, having as target scenarios non-
familiar public places where visually impaired
people can require a stronger support (e.g. to be
accompanied by someone). Navigation systems are
moving from auditory (Crandall, 2001) to tactile
interfaces for providing information to the user, this
is due to multiple factors: first of all a tactile display
is less intrusive. Secondly, progress in electronics is
making it possible to realize wearable lightweight
and low power systems, well suited for vibrotactile
systems. Many devices have been proposed for
outdoor navigation based on tactile interfaces: most
of them are belts (Tsukada, 2004), others are instead
wrist based interfaces (Bujnowski, 2008). Only a
few systems address the problem of indoor
navigation (Ross, 2004), (Ghiani, 2008) mainly by
means of vocal messages and expensive
architectures. As a matter of fact, one of the issues
that arise in indoor environments is how to localize
the user in a building. High accuracy is required to
help a blind person in wayfinding tasks, thus the
current state of the art employs RFID tags (Ghiani,
2008) or ultrasounds (Ross, 2004). Those methods
require a big amount of tags or base stations in order
to determine the user position, resulting in quite
expensive systems. For this reason, they are often
based on the proximity approach, providing
information to the user only when he is close to a tag
or a base station, implementing indeed obstacle
avoidance instead of navigation. Radio frequency
technology, such as BT, has not been adopted for
navigation purposes because of the low resolution
that usually characterize it. Employing a localization
system based on BT would result in a cost-effective
infrastructure, since many building are equipped
with PCs with BT connectivity. Our novel approach
in this direction showed promising results (0.5
meters of accuracy), as pointed out in (Altini, 2010).
Navigation systems are usually validated in three
ways: questionnaires, time employed for completing
a route, difference between the optimal path and the
one taken by the user (Tsukada, 2004), (Heuten,
2008). Hence, other metrics to compare different
kind of actuators or even to assess quantitatively the
performance given by such systems are still needed.
A small step in this direction was taken in
(Bujnowski, 2008); the authors show the activation
of the sensorimotor area of the brain during
vibrotactile stimulation. They demonstrated that the
tactile stimulation was actually influencing the user
perception, even if it was not possible to quantify or
characterize such influence.
3 SYSTEM OVERVIEW
The navigation process, often called wayfinding, is
usually based on three steps. The first step is user
localization, the position of the user in relation to
some known landmarks in the building needs to be
determined. The second step regards choosing the
correct route. This phase usually requires some kind
of mental elaboration by the user, which is aware of
the current position and of the destination. The third
step is keeping the user on the right track. This is the
most challenging step. To overcome the challenge of
keeping effectively the user on the route towards the
destination selected, we developed the system
supported by the architecture described in Fig. 1.
The system is composed of four main components;
the localization engine, a compass module, the
haptic node (vibrotactile actuator), and the
navigation engine. The navigation engine is the core
of the system, receiving input from all other building
blocks. It runs on a smart processing unit (in our
preliminary setup, a netbook). The navigation engine
coordinates input from the localization system and
the compass module to control the vibrotactile
actuation, in an effective close loop. For a blind
person to be completely autonomous during a visit,
we included a vocal component. The vocal
component takes care of helping the user in deciding
which destination to reach and notifies the user
when he is arrived at the selected destination.
Connecting the magnetometer module to a
microcontroller we can easily provide the user
orientation to the main application running on the
netbook by means of a serial interface. The netbook
is carried by the user and uses the information
provided by the compass module, along with the
RSSI values retrieved from the base station nodes, to
determine the position of the user. Once the user has
been localized the route planner has all the
information that it needs for guiding him. Given the
location and the orientation it can send the proper
command to the vibrotactile actuator. The
vibrotactile actuator is a small board composed of a
microcontroller and five motors (see Fig. 2).
The whole system can supply the blind person with
assistance while walking a route in a building using
vibrations to point out what decision to make. Fig. 3
shows a map of the building in which the system has
been tested. The circles in the picture represent the
positions that the localization system can recognize
HEALTHINF 2011 - International Conference on Health Informatics
478
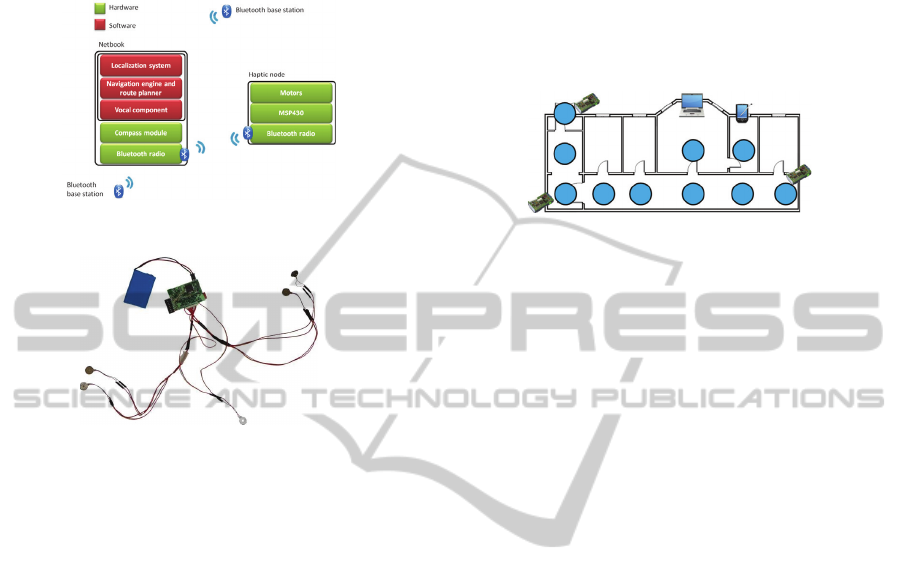
with high accuracy. Fig. 3 shows also the location of
the base stations that are employed for the
localization of the user. A total of five base stations
are used by our architecture.
Figure 1: System architecture.
Figure 2: The Haptic Node, our vibrotactile actuator.
4 THE LOCALIZATION SYSTEM
One of the main building blocks of the navigation
system is the localization engine. Many different
methods have been proposed for indoor localization
and navigation. Among others, localization
algorithms based on BT technology have the
advantage to work on top of the most widespread
wireless communication standard. Many BT based
localization and positioning systems are based on the
use of RSSI (Received Signal Strength Indicator) to
determine the user location. Unfortunately, the
shortcomings that affect this parameter are manifold,
mainly due to propagation effects. Thus, it is almost
impossible to obtain accurate location services using
standard techniques such as triangulation from three
or more BT base stations. RSSI based localization
systems are typically affected by low accuracy due to
variability of the signal strength in presence of
obstacles between the base stations and the user that
is carrying the system. As a consequence, the
differences in RSSI values often depend also on user
orientation, which determines different degree of
power absorption by user body. Thus, we introduced
a multiple neural networks architecture that can
handle changes in RSSI values due to user
orientation. We demonstrated with experimental
results that first training and then activating neural
networks tailored on the user orientation (determined
by the compass module), high definition accuracy is
achievable, allowing indoor navigation with a cost-
effective BT architecture. The system can provide
position estimate with 0.5 meters of accuracy during
a walk. Details on the system can be found in (Altini,
2010).
Figure 3: Map of the building where the system was
tested.
5 VIBROTACTILE ACTUATION
The use of haptic interfaces to provide information
non-visually has been widely investigated. The
sensitivity of different parts of the body to
vibrotactile stimulation has also been studied in
depth. Vibrotactile displays are based on low-cost
and low-power motors, such as page motors
available in every mobile phone nowadays. Many
studies on how to convey complex information with
this kind of motors have been carried out, basically
tuning parameters such as frequency, amplitude,
rhythm and location on the body. One of the main
goals of tactile displays must be providing
directional information intuitively, in the easiest way
possible. We realized a wearable system, composed
of small sized parts, such as the 312-103 motors by
Precision Microdrivers (see Fig. 2). The frequency
of resonance of these motors is close to 200 Hz,
which is the maximum sensitivity of the human skin.
Our system is a wireless device composed of five
motors, a microcontroller (MSP430) and a BT
module. The MSP430 is a well known low power
microcontroller, in our application it is constantly
kept in Low Power Mode, since the actuator will be
off for the most of the time (e.g. the user reached the
destination and will go back to the entrance of the
building after a few hours). In case the actuator has
to provide vibrotactile feedback activating the
motors the microcontroller is woken up by an
interrupt followed by a code indicating the type of
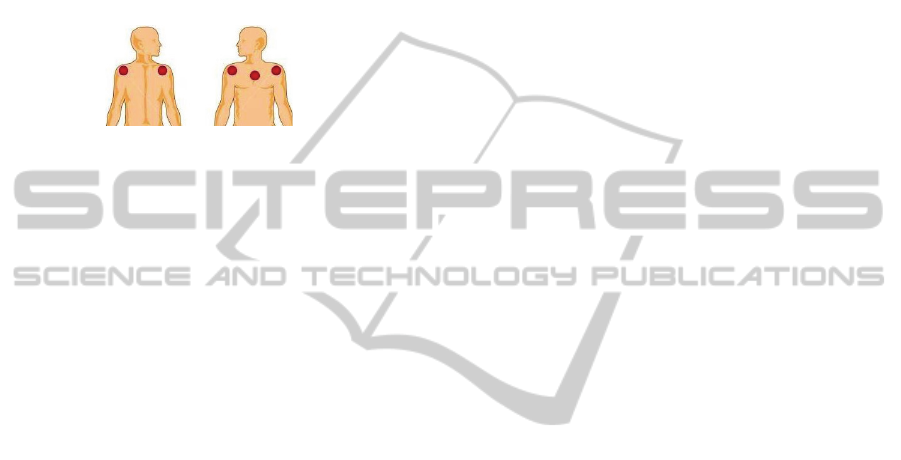
vibro-message to deliver. Four of the motors are
placed on the shoulders, while the last one on the
chest (see Fig. 4), those areas have been proved
effective for this kind of application in other studies
(Toney, 2003). According to van Erp (van Erp,
A COST-EFFECTIVE INDOOR VIBROTACTILE NAVIGATION SYSTEM FOR THE BLIND
479
2005) the resolution on the torso is about 1 cm,
nevertheless increasing the number of motors would
bring easily to higher percentage of error during the
recognition task. Thus we decided to employ only
five motors and to activate them as follows:
- Go forward: motor on the chest is activated
- Turn left of 90°: both the motors on the left
shoulder are activated simultaneously
- Turn right of 90°: both the motors on the right
shoulder are activate simultaneously
Figure 4: Position of the motors on the body.
Each command is provided by a double vibration
of the motors involved (500 ms long). The indication
of the direction to follow provided with motors
vibrating in the corresponding location on the body
is very intuitive and the user does not need any
previous training to be able to use the device.
6 EXPERIMENTAL RESULTS
All the different parts of the system need to be
tested. The system performance was measured in
three different modalities on sighted users; time
needed to complete a route, deviations between the
correct path and the route employed by the user, and
usability tests. By means of those tests we can
determine how accurate the system is in a navigation
task. Every route within the building in which we
tested the system was composed of three basic paths.
During the tests the system randomly chose five
consecutive paths in order to build a more
complicated route, necessary to effectively test the
system. In this way every route was approximately
75 meters long (the main corridor that can be seen in
Fig. 3 is 18 meters long). During the tests both the
time and the route taken by the users were logged.
Preliminary tests were run on three users, all men,
between 25 and 27 years old. All participants had no
mental or physical impairments. They had no
previous knowledge about the routes. Each of them
received a brief introduction on the system.
The main limitations shown by those tests are
due to the localization system. In fact for navigation
purposes the localization system needs to be reliable
and thus the user has to walk at a slow pace, in our
case 0.5 km/h. Although the speed is quite low it
might be sufficient for blind users, especially in
indoor environments. Finally, an adaptation of the
USE questionnaire (Lund, 2008) was filled in by the
users. The questionnaire is subdivided into three
sections: ease of use, ease of learning, and
satisfaction. It emerged that system is easy to use,
user friendly and its use is effortless. It is easy both
to learn and to remember how to use it. Moreover,
the system is not really flexible due to its prototypal
nature.
7 EEG ANALYSIS
Although many researchers developed different
kinds of vibrotactile systems there is no common
methodology for comparing them, making
challenging to establish which one would fit best a
given application. Typically, the evaluation of
actuation systems is carried out by means of
questionnaires and therefore based on user
subjective perception. For those reasons we tried to
explore a new approach to evaluate the efficacy of
the vibro-tactile feedback by acquiring information
on the user perception in a quantitative and
measurable way. This is pursued by means of EEG
analysis. The basic idea behind our experiment is
based on the study of Event Related Potentials
(ERPs), in particular the P300. An ERP (Neuper,
2006) is an electrical potential recorded from the
nervous system following presentation of a stimulus
and it can be directly associated with perception.
ERPs do not depend only on the processing of the
physical stimulus itself, but are believed to be
caused by higher processes, that might involve
memory, expectation or attention. The signal is
typically measured in the parietal area, and it is
evoked delivering a stimulus in one of the sensory
modalities. The most common procedure is called
oddball paradigm. A target stimulus is presented
amongst more frequent standard background stimuli.
In addition, a distracter stimulus is often used to
make sure that the EEG response to the target
stimulus is not only due to the change from the
background pattern but it is a real cognitive function.
One subject took part in this preliminary study. The
experiment was structured as follows: the subject
(26 years old, male, no impairments) was wearing
the vibrotactile actuator (the haptic node). He was
instructed to pay attention to one typology of
stimulus, the target, counting the number of
stimulations, and to ignore the other stimuli. Each
one of the stimuli used for the experiment (both
target and non-target) was one of the vibrotactile
HEALTHINF 2011 - International Conference on Health Informatics
480

messages defined in section 5. A third stimulus was
introduced as a distraction. Each experiment was
carried out in different modalities, a total of six tests
were run (oddball paradigm with two stimulations,
target on the right (1) and left shoulder (2), with eyes
pen (3-4) and closed (5-6). The inter-stimuli interval
was between 2 and 3 seconds, for each trial the
subject received more than 200 stimulations. 19
channels of earlinked referential EEG data were
recorded positioning the electrodes according to the
standard 10-20 system. Data was filtered and
averaged. Independent Component Analysis was
used for artifact removal (eye blinking). After this
phase the data was ready for ERPs analysis. The
P300 elicited by the haptic node showed low
latency. The result of the experiment is shown in
Fig. 5. The P300 is elicited by the rare non-target
stimulus (marked as “center” in the picture), as well
as by the rare target stimulus, but the P300
associated to the target stimulus, in this case on the
left shoulder, is faster. This can be associated with
the cognitive process that follows the recognition of
the target stimulus.
Figure 5: P300 elicited by the haptic node.
In our point of view those P300 evoked potential can
possibly be used as the “fingerprint” of a given
vibrotactile actuator, and along with other
information such as the typology of motors adopted
and the vibrotactile messages conveyed to the user
can serve as a parameter for characterizing different
kind of vibrotactile actuator systems, making it
possible to compare them and to choose the most
appropriate for a given application.
8 CONCLUSIONS
In this paper we presented an indoor navigation
system for the visually impaired people that use
vibrotactile messages to provide directional
information to the users. The system is low cost and
low power, employing off-the shelf motors, a few
BT base stations, a compass module and common
office devices we could obtain encouraging results
during preliminary studies on non impaired users.
Additional tests on blind users shall be carried out in
the near future. Our system can enhance the
autonomous mobility of individuals with visual
losses within a building, providing directional
information intuitively. The last section of the paper
introduced a methodology to evaluate a vibrotactile
system and to compare it against other solutions, by
means of EEG analysis. In this context we analyzed
the P300 evoked potential after vibrotactile
stimulation in different conditions.
REFERENCES
Crandall, W., Bentzen, B. L., Meyers, L. & Brabyn, J.
“New orientation and accessibility option for persons
with visual impairment: Transportation applications
for remote infrared audible signale”, Clinical and
Experimental Optometri, 2001.
Tsukada, K., and Yasumura, M., “Activebelt: Belt-type
wearable tactile display for directional navigation,” in
Lecture Notes in Computer Science. Springer-Verlag
GmbH, Oct 2004, vol. 3205, pp. 384 – 399.
Bujnowski, A., Drozd, M., Kowalik, R., Wtorek, J, “A
tactile system for informing the blind on direction of a
walk,” Human System Interactions, 2008 Conference
on , vol., no., pp.893-897, 2008.
Ross, D., “Cyber Crumbs for Successful Aging with
Vision Loss,” IEEE Pervasive Computing, vol. 3, no.
2, pp. 30-35, Apr.-June 2004.
Ghiani, G., Leporini, B., Paternò, F., Santoro, C.,
“Exploiting RFIDs and tilt-based interaction for
mobile museum guides accessible to vision-impaired
users,” ICCHP 2008.
Altini, M., Brunelli, D., Farella, E., Benini, L., “Bluetooth
Indoor Localization with Multiple Neural Networks,”
Proceedings of the 5
th
International Symposium on
Wireless Pervasive Computung, 2010.
Heuten, W., Henze, N., Boll, S., Pielot, M., “Tactile
wayfinder: a non-visual support system for
wayfinding,” NordiCHI '08: Proceedings of the 5th
Nordic conference on Human-computer interaction,
page 172-181. ACM, 2008.
Toney, A., Dunne, L., Thomas, B., Ashdown, S., "A
shoulder pad insert vibrotactile display," iswc, pp.35,
Seventh IEEE International Symposium on Wearable
Computers, 2003.
van Erp, J. B., “Vibrotactile spatial acuity on the torso:
effects of location and timing parameters,” In
Proceedings of the First Joint Eurohaptics Conference
and Symposium on Haptic interfaces For Virtual
Environment and Teleoperator Systems, 2005
Lund, A., “Measuring usability with the USE
questionnaire”, 2008.
Neuper, C., Klimesch, W., “Event-Related dynamics of
brain oscillations,” Volume 159.
A COST-EFFECTIVE INDOOR VIBROTACTILE NAVIGATION SYSTEM FOR THE BLIND
481
