
A COLLECTIVE BIOLOGICAL PROCESSING ALGORITHM
FOR ECG SIGNALS
Horia Mihail Teodorescu
FAS, Harvard University, Cambridge, MA, U.S.A.
Keywords:
Swarm model, Signal processing, Filtering, Biologic signal, EKG.
Abstract:
We establish and explore an analogy between hunting by packs of agents and signal processing. We present a
version of adaptive ‘Hunting Swarm’ algorithm (HSA), apply it to ECG signals, and investigate the influence
of the model parameters on the filtering of stationary and nonstationary noise. We show that results obtained
with the HSA filter may outperform results obtained with several other filters.
1 INTRODUCTION
Biological signals have wide bandwidth and may be
affected by various noises. The first stage in process-
ing such signals consists of filtering them in order
to achieve a good signal to noise ratio (SNR). This
task is often challenging because of the wide band of
the signals and of the noises. As a consequence, nu-
merous papers have been published recently propos-
ing new filtering methods for ECG signals (Almenar
and Albiol, 1999), (Leski and Henzel, 2005), (Ko-
tas, 2007), (Korrek and Nizam, 2010), (Bansal et al.,
2009), (Yan et al., 2010).
In a previous communication (Teodorescu and
Malan, 2010), we introduced an image processing al-
gorithm based on swarms. In this paper we explore
several variants of the ‘hunting swarm algorithm’
(HSA) and analyze their ability to remove noise from
EKG signals for various signal to noise ratios (SNR).
The signal is ‘enacted’ by the trajectory of a prey
hunted by the swarm, as detailed in section 2.
The models of the swarms in this paper include
salient features from various swarm models reported
in the literature and features that we introduced based
on general considerations or from experimentation
with model parameters.
The organization of the paper is as follows. In the
second section we expose the method to transform the
signal processing task into a pack-hunting-a-prey task
and describe the equations describing the prey and the
pack movements. The third section is devoted to the
results of filtering ECG signals with the HSA algo-
rithm. The details of the implementation and the re-
sults are discussed in the fourth section. Conclusions
are drawn in the last section.
2 THE HS SIGNAL PROCESSING
METHOD
2.1 Metaphor of the Hunting Pack
In this section we suggest and exploit an analogy be-
tween signal filtering and the natural hunting packs.
We use this analogy to produce an algorithm for non-
linear signal processing. The analogy has two main
players: the prey and the hunting pack. The prey does
not collaborate to the signal processing; instead, it en-
acts the signal. The pack performs a virtual hunting
and in so doing it produces the output (processed) sig-
nal as the trajectory of the center of the pack. The
hunting pack model, while borrowing much from var-
ious swarm models, has many new features that give
reason to consider it a new swarm model.
Figure 1 depicts a sketch of a simplified process-
ing procedure. In this sketch, the swarm is assumed
constrained on a line at each time moment, with the
agents taking positions along that vertical line, ac-
cording to movement equations governed by inter-
agent forces and to agent to prey forces. The prey
moves in discrete time along the signal. The agents
are attracted by the prey, thus tending to follow the
prey. Consequently, the center of the swarm describes
a trajectory in the plane. That trajectory is the result
of ‘processing’ the prey trajectory, i.e. the signal, by
the swarm.
413
Mihail Teodorescu H..
A COLLECTIVE BIOLOGICAL PROCESSING ALGORITHM FOR ECG SIGNALS.
DOI: 10.5220/0003136304130420
In Proceedings of the International Conference on Bio-inspired Systems and Signal Processing (BIOSIGNALS-2011), pages 413-420
ISBN: 978-989-8425-35-5
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
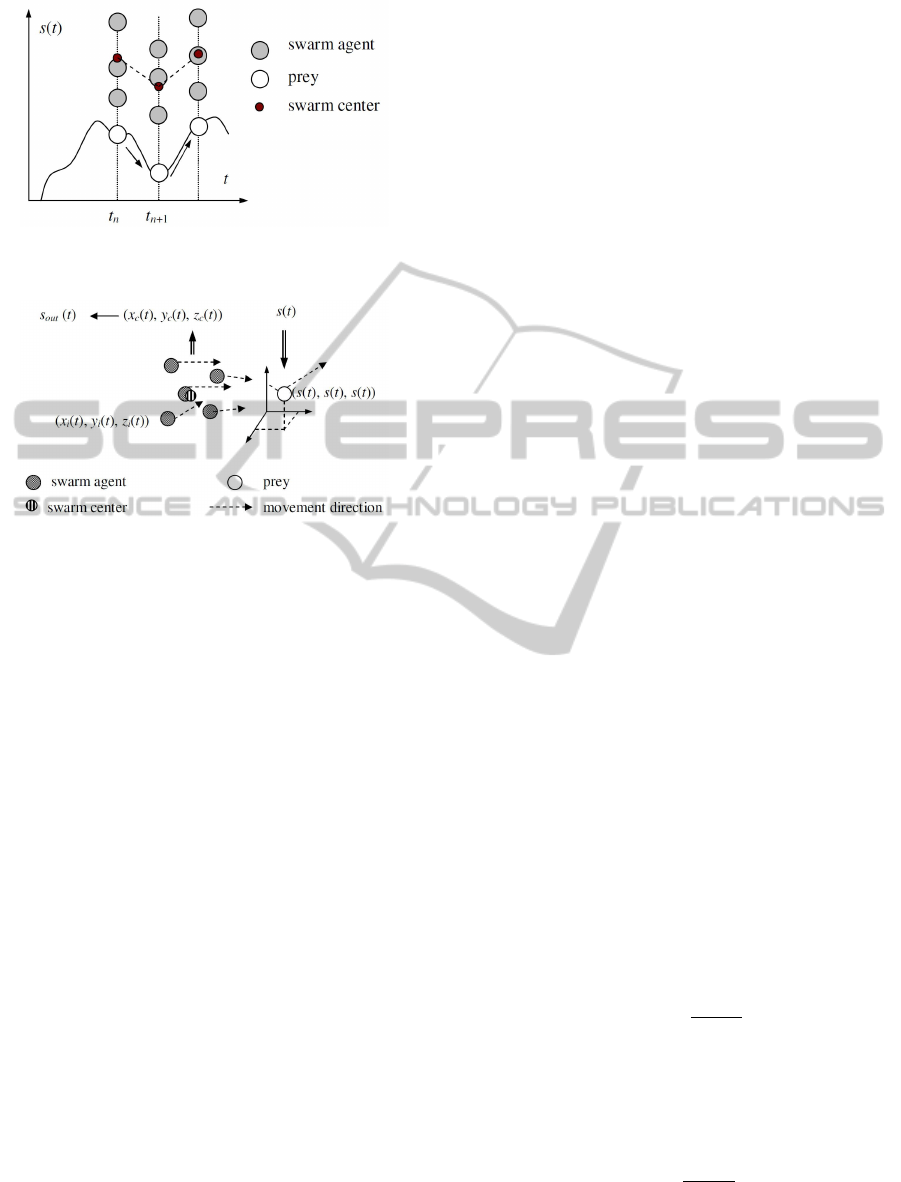
Figure 1: Sketch of the operation of the swarm as signal
processing system.
Figure 2: Sketch of the operation of the swarm as signal
processing system.
Figure 2 shows a sketch of the procedure in three
dimensional (3D) space. In this sketch, the prey
moves along a trajectory represented by (x
p
(t) =
s(t),y
p
(t) = s(t),z
p
(t) = s(t)) and represents the in-
put signal marked by the double line arrow in the up-
per right side of the figure, while the center of the
pack represents the output signal.
The use of this metaphor in signal de-noising
is based on the hypothesis that hunting swarms are
able to filter out ‘undue’, ‘evasive’, that is, noise-like
changes in the trajectory of the prey during the hunt-
ing. Moreover, swarms might use a simple collective
adaptation of its behavior to closely follow the prey
when the last had the chance to take a larger distance.
These hypotheses were verified during simulations, as
demonstrated by the result section. The consequence
is the present proposal of HS filtering method.
Because the model is somewhat elaborate, we in-
troduce in the subsequent section the equations of the
swarm, neglecting the prey, while in the 2.3 subsec-
tion we take into account the prey influence and the
adaptive behavior of the prey as elicited by the prey
movement.
2.2 Swarm Basic Equations
Hunting takes place according to a set of equations
that govern the movements of the agents in the pack.
These equations have three types of components. The
first type comprises ‘physical’ forces like the inertia
and the friction forces. The second class of forces
includes the interaction forces inside the pack; these
forces keep the pack together, while preventing agents
from colliding one with the other. The agents are
endowed with an elementary memory and with an
awareness to the global state of the pack, moving
accordingly. Finally, the ‘external’ force that pro-
duces the movement of the swarm is the interaction
of the agents with the hunted prey. The general equa-
tion governing a swarm is, according to (Reza Olfati-
Saber and Murray, 2007):
˙x
i
(t) =
∑
j∈N
i
(x
j
(t) − x
i
(t)) + b
i
(t) (1)
with the initial conditions x
i
(0) = z
i
and b
i
(t) = 0.
Above, x is a spatial coordinate, i, j denote agents of
the swarm, b is due to an external force (bias). The
left hand side of the equation represents the velocity,
while the terms under the sum in the right-hand side
are similar to elastic forces, F = κ · (x
0
− x), where κ
is the elastic constant and x
0
is a fixed position. For
the swarm, x stands for the position of the agent x
i
and x
0
is replaced by that of the prey, x
p
. In case of
consensus algorithms, the above equation in discrete
time and without the term b
i
is (Reza Olfati-Saber and
Murray, 2007):
x
i
[t + 1] = x
i
[t] + ct ·
∑
j∈N
i
a
i j
· (x
j
[t] − x
i
[t]) (2)
where a
i j
are constants and t denotes here a discrete
time moment. Under certain conditions, the swarm is
stable, which in terms of consensus theory means that
a consensus is asymptotically reached (Reza Olfati-
Saber and Murray, 2007).
Kim (Kim, 2008) used artificial potential func-
tions to model the attraction towards the goal. We use
a similar approach, but with different potential func-
tions, moreover also including repulsive forces that
replace the attractive ones starting with a given dis-
tance. The potential forces we use have the form:
(i) - for the repulsive forces:
F
i, j
= −k
1
·
x
j
− x
i
d
η
1
i, j
(3)
for d
i, j
≤ ρ
1
, where k
1
is a positive constant, d
i, j
is the
distance between the agents denoted by the indices i
and j, η
1
is a natural power, and ρ
1
is a constant;
(ii) - for the attractive forces:
F
i, j
= k
2
·
x
j
− x
i
d
η
2
i, j
(4)
for d
i, j
≤ ρ
1
, where k
2
is a positive constant, d
i, j
is the
distance between the agents denoted by the indices i
BIOSIGNALS 2011 - International Conference on Bio-inspired Systems and Signal Processing
414

and j, η
2
is a natural power, and ρ
2
> ρ
1
is a constant.
The constants in the above equations are parameters
of the processing system.
The above forces create accelerations that are
computed as:
a
u,i
[t + 1] = −k
1
·
∑
j
u
j
[t − 1] − u
i
[t − 1]
d
η
1
i, j
[t − 1]
(5)
where u stands for x, y, or z and a
u,i
is the acceler-
ation in the direction u of the agent i due to the re-
pulsion at small distances from the other agents in the
pack, or due to attraction at larger distances. Sub-
sequently, we use the first order approximations of
the derivative, ˙u[t] = (u[t] − u[t − 1]) · δ, where u is
a coordinate variable, t is a discrete variable stand-
ing for time, and δ is the step for time discretiza-
tion. Then, the inertial force along the u direction
is m · ¨u = m · (v
u
[t] − v
u
[t − 1]), where v
u
is the ve-
locity along the u direction and m is the mass, which
we assume unitary for all agents in the pack. Based
on the acceleration, according to the last equation, the
change of velocity is computed as
v
u,i
[t + 1] = v
u,i
[t] + δ · a
u,i
[t]. (6)
In (6), δ is the time step interval and represents an
important parameter in the simulations. Larger values
of δ make the pack respond faster to the signal, but
can produce overshoots when the signal varies fast.
We used values of δ between 0.5 and 2 for best results.
Next, we include in equation 6 the effect of fric-
tion forces, that we assume to have components
proportional to the respective velocity component,
F
u, f riction
= µ · v
u
. The change in velocity due to the
friction is ∆v
u
= F
u, f riction
÷ m = −ct. · v
u
, where the
constant includes µ, the time step, δ, and the inverse of
the mass, m
−1
. For ease of writing, subsequently we
denote by µ the constant in the change of the velocity
due to friction, ∆v
u
[t + 1] = −µ · v
u
[t].
2.3 Prey Influence and Adaptive
Swarms
The prey is assumed to move independently of the
movement of the hunting swarm. This hypothesis is
unsuitable for biological or physical modeling pur-
poses, but it is required by the task we deal with, be-
cause the signal, enacted by the prey, should remain
independent of the processing. On the other side, the
prey ‘attracts’ the hunting swarm. The attraction force
we use is a third order, nonlinear, elastic-type force
with the expression:
F
u;a,p
= A
1
· (u
p
− u
a
) + A
2
· (u
p
− u
a
)
3
,A
1
,A
2
≥ 0
(7)
where u
p
are the coordinates of the prey and A
1
, A
2
are model constants. Including the contribution of the
prey to the acceleration of the agents, the equation (6)
rewrites
v
u,i
[t + 1] = v
u,i
[t]+ (8)
+δ · a
u,i
[t] + A
1
· (u
p
− u
a
) + A
2
· (u
p
− u
a
)
3
. (9)
where, again, we assume that we included the δ fac-
tor in the constants A
1
,A
2
without changing the nota-
tions. The position of the agent at time step t + 1 is
obtained as
u
i
[t + 1] = u
i
[t] + δ · v
u,i
[t]. (10)
A set of restrictions, like a limit in acceleration and
a limit in the change of direction are added, which
have intuitive biological counterparts. We skip details
here, but we used these limits in the swarm processing
system whose results we describe.
Once the positions of the N swarm agents at time t
are computed, we determine the position of the center
of the swarm as
u
s
[t] =
1
N
·
∑
i
u
i
[t]. (11)
It is natural at the biological level that agents in
the swarm are aware of the behavior of the swarm as
a group and to adjust to it. We make a further hy-
pothesis, that in a hunting pack the agents are aware
of the relative position of the pack and the prey, ad-
justing their speed according to that relative position.
Namely, we assume that, whenever the distance from
the center of the pack to the prey becomes too large,
every agent will increase its velocity by a factor pro-
portional to u
p
− u
s
. So, if |u
p
− u
s
| ≥ D, an in-
crease in velocity ∆v
u,i
= B · (u
p
− u
s
) occurs for all
the agents. This conditional increase of the agents
velocity stands for an elementary adaptation to the
momentary conditions of hunting. From the point of
view of the HS filtering algorithm, this adaptive be-
havior means better results in case the signal has fast
transients or fronts. We skip technical details related
to the algorithm implementation and provide some of
them in the Appendix.
The choice of the forces governing the swarm
behavior was made based on considerations related
to the dynamic bahavior. These considerations are
quite transparent and intuitive at the physical level.
For example, the use of the third order, nonlinear,
elastic-type force increases the speed of reaction of
the swarm to fast changes in the signal, while the use
of limits in acceleration and limits in the change of
direction of the agents insures that the agents and the
swarm have limited overshoots. The use of odd pow-
ers in the forces expressions are also rationally moti-
vated: even powers loose the direction information in
the relative positions of the agents and the prey.
A COLLECTIVE BIOLOGICAL PROCESSING ALGORITHM FOR ECG SIGNALS
415
3 PROCESSING RESULTS
We exemplify the results we obtained with the HS
signal processing method applied to EKG signals.
We used the signal database PhysioBank (Goldberger
et al., e 13). All input signal filenames referred to
in the figures are from Physiobank, to which we add
noise. We show two categories of results. The first
one refers to noisy EKG from the cited database; the
second refers to filtering results obtained when apply-
ing the processing to relatively clean EKG signals that
we corrupted with uniform noise of various ampli-
tudes. Notice that the noisy ECG signals include true
noise; to these we have not added any extra noise.
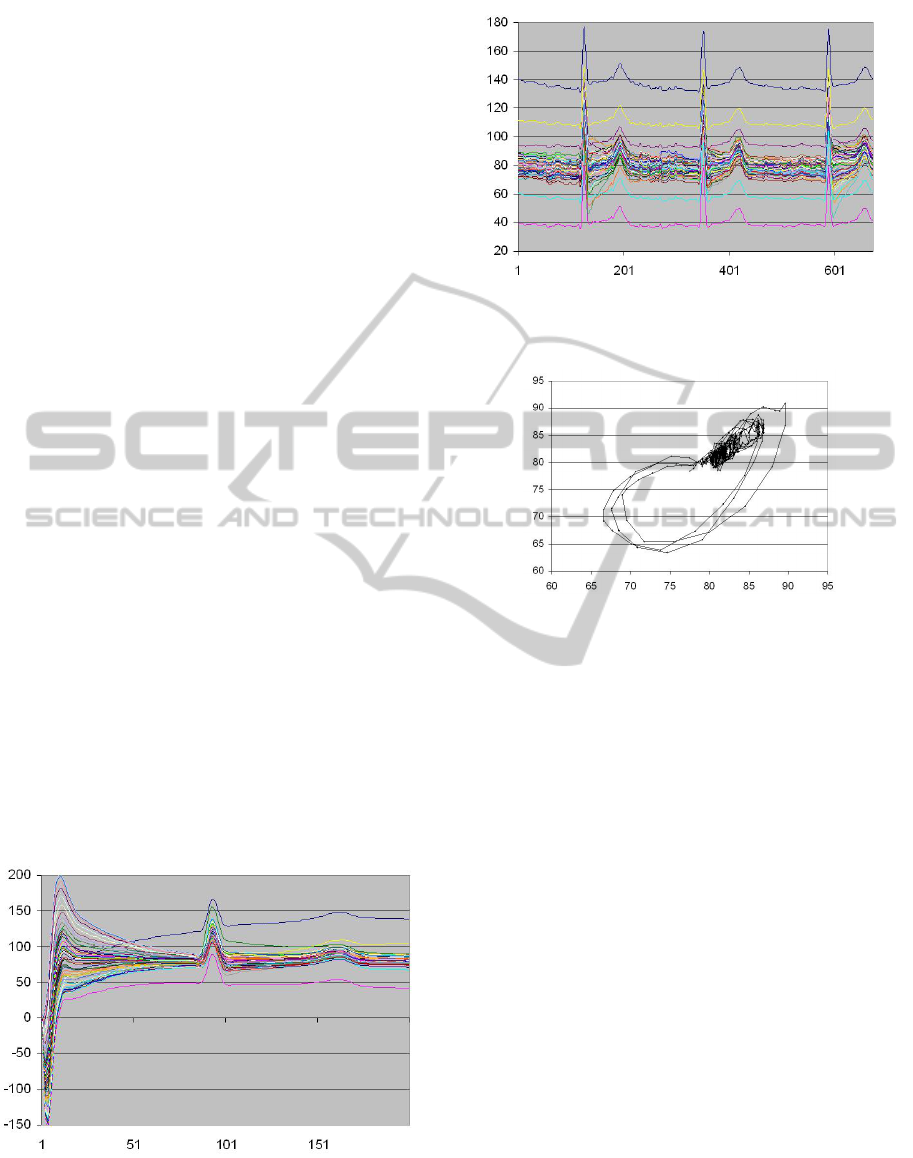
3.1 Mechanics of the Filtering Process
The mechanics of the HS processing is revealed by
the representation of the trajectories of all the agents
in the pack and by a representation of the dependency
of the evolution of the center of the pack with respect
to the processed signal. The ‘hunting’ process has two
phases. In the first phase, the pack, which is assumed
to start from random initial conditions, is structuring
itself and evolves toward an almost stable configura-
tion. This transitory regime is shown in Fig. 3 and
may last about 100 time steps, its duration primarily
depending on the initial positions and on the friction
forces. After the transitory behavior, the swarm re-
mains almost stable, despite its continuous movement
driven by the prey. Only when the signal has very
fast variations, the swarm may be partly de-structured
and needs some time to recover its equilibrium. This
regime of dynamic stability is shown in Fig. 4 for a
swarm including 55 agents.
Figure 3: Transitory regime of the hunting pack takes about
100 time steps for this swarm of 55 agents, with µ = 0.35,
η
1
= η
2
= 4.
Figure 4: Processing result with a swarm with 55 agents,
using the fourth power of distances in the inter-agent repul-
sive and attraction forces and a friction coefficient µ = 0.35.
Figure 5: Swarm trajectory plot versus the signal.
The representation of the trajectory of the center
of the swarm as an implicit function of the trajectory
of the prey shows, for almost all processed signals,
that two or three regimes occur during the ‘hunting’,
regimes that are represented by the loops in the dia-
gram in Fig. 5.
3.2 Filtering Noisy Signals
For determining the usefulness of HS filtering, we
tested the swarm filters with signals from the bench-
mark database PhysioBank ATM (Goldberger et al.,
e 13). Two types of tests were carried on: (i) filter-
ing signals from PhysioBank that are (intrinsically)
noisy, and (ii) filtering clean signals to which con-
trolled noise is added. The first type of tests is needed
for determining if the new filters are able to solve a
real-life problem; the second type of tests allows us
to investigate the capabilities of the filtering proce-
dure under various controlled conditions.
We exemplify the filtering of noisy signals from
PhysioBank ATM with the signals Fantasia f1y07 and
Apneea ECG A01.
The trajectories of the agents of a swarm of 55
agents during the ‘hunting’ process (Figure 4) are av-
eraged to obtain the center of the pack trajectory. Re-
sults of the HS filtering are shown in Figures .
BIOSIGNALS 2011 - International Conference on Bio-inspired Systems and Signal Processing
416
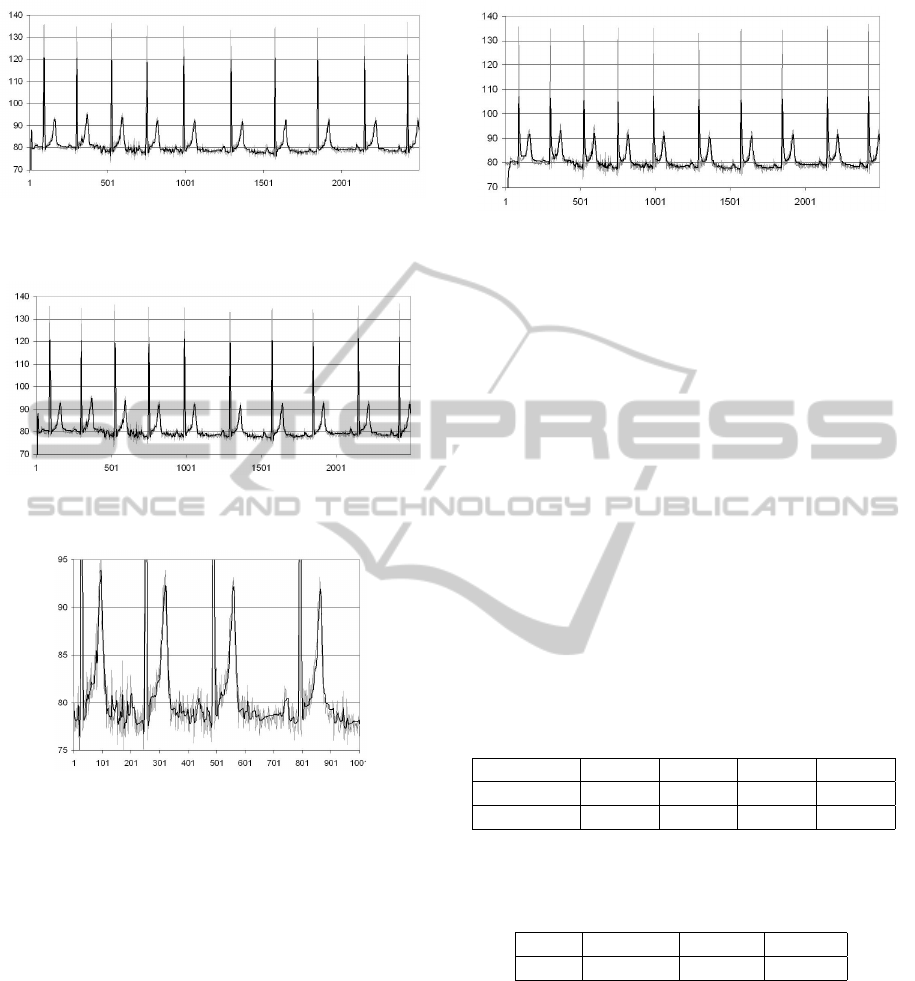
Figure 6: Processing result with a swarm with 55 agents,
using the fourth power of distances in the inter-agent repul-
sive and attraction forces and a friction coefficient µ = 0.35.
Figure 7: µ = 0.35 Original signal and HS filtering result
with a swarm with parameters described in the text.
Figure 8: Detail from the above figure (µ = 0.65).
The various parameters of the swarm influence the
results. For example, as expected, a too large fric-
tion coefficient would produce a slower ‘catching’ of
the signal when the signal has large swings, like the
QRS complex. However, the slowing down is not the
same on the upper and lower front of the impulsive
signal, because of the nonlinearity in the swarm be-
havior. This is seen in Fig. 3.
The HS filters are causal, meaning that they take
into account only previous values of the signal to gen-
erate the current value of the filtered signal. As a con-
sequence, there is a delay between the produced out-
put value and the current value of the signal. For the
numerical evaluation of the performance of the HS
filters, for example for applying the mean square er-
ror criterion, we need to determine the lag of the fil-
ter. We determined the corresponding lag for a filter
with specified parameters minimizing the MSE be-
tween the signal and the HS output, for signals not
Figure 9: The same signal filtered with a swarm with fric-
tion coefficient µ = 0.65.
corrupted with noise, according to the formula:
τ = min
k
(
t
2
∑
t=t
1
(s
c
[t + k] − s
0
[t])
2
) (12)
where t
1
,t
2
are the limits of the interval of determi-
nation (we used t
1
= 200,t
2
= 950), s
c
is the output
signal, and s
0
the input signal. The results for such
a filter are given in Table 1, showing that the lag of
this filter is τ = 3. We removed the lag when we com-
puted the MSE for the filtering of noisy ECGs. Notice
that the lag is variable and can not be predicted be-
forehand. Therefore, using a non-causal swarm filter
would not solve the lag problem completely. How-
ever, the occurrence of the lag does not influence the
quality of the filtering. It only affects the manner of
computing the MSE value, which is a secondary is-
sue.
Table 1: MSE errors of the swarm filter, for various adjust-
ments of the lag. Signal Apnea ECG A01.
delay τ = 0 τ = 3 τ = 5 τ = 6
Total error 6247.8 2624.1 5971.8 7597.9
MSE 2.886 1.870 2.822 3.183
Table 2: MSE errors of the swarm filter (delay τ = 3), av-
erage and median filters for the same signal and noise, for
various adjustments of the lag. Signal Apnea ECG A01.
Filter HS τ = 3 average median
MSE 1.870 2.467 2.621
For quantitatively comparing the results of the HS
filter with the results of median and average filters,
we run the program over signals corrupted by us with
uniform noise. The same input signal with the added
noise was then filtered with an average filter and with
a median filter, both of them with window width of
length 11, centered on the current sample. When the
noise is high, the HS filter outperforms in terms of
MSE the other filters, as shown in Table 2.
A COLLECTIVE BIOLOGICAL PROCESSING ALGORITHM FOR ECG SIGNALS
417

4 DISCUSSION
The HS processing method is highly nonlinear and
hence sensitive to the amplitude of the signals. Good
results are obtained with the parameters we used for
signal amplitudes in the ranges seen in the figures. We
multiplied all signals in the cited database by a factor
of 10 before processing.
The HS filters are causal and the processing results
have a lag with respect to the signal. To determine the
lag, we shifted the result and compared the sum of
squared errors obtained for various shifts. The lowest
error was obtained, in case of the signal Apnea-ECG
A01 (length 10 seconds, data format: standard) for a
lag of 3 time steps. The total squared error was com-
puted for the various filters for 750 samples, for the
samples from 200 to 950. We skipped the first 200
samples to avoid the transitory regime of the swarm
filter. The mean square error, MSE, was determined
as MSE
2
= (
∑
t=200..950
(s
c
[t] − s
0
[t])
2
)/750. The re-
sults related to the determination of the lag are shown
in Table 1 in the Annex.
While the algorithm is O(n) in the number of input
signal samples, the calculations at each step involve
looping over the swarm, moreover involve many mul-
tiplications. As a result, the processing is time con-
suming. A swarm of 55 agents, with η
1
= 4 and
eta
2
= 4, implemented in a C++ unoptimized program
that also writes more that 10 files on the disk, takes
about 3 seconds to process 2500 samples of input sig-
nal. This means that the process can be performed in
real time for ECG signals at a sampling frequency of
about 800 Hz.
The HS filter produces smoother output than the
average and median filters of order 11 (see Appendix).
The results are not exactly the same when the code
is run several times. The method is not perfectly de-
terministic, as the swarm starts with random condi-
tions, moreover several configurations of the swarm
may have the same or similar internal energy, thus al-
lowing the swarm to follow close but not identical tra-
jectories when following the same prey.
The system is not guaranteed stable. For example,
swarms with 25 agents or with 85 agents, the other
parameters being the same as above, are unstable. As
far as the swarm remains stable, the number of agents
in the swarm was found to have less influence on the
filtering error than parameters like µ and constants in
adaptation.
While we used the analogy with the hunting pro-
cess, the presented algorithm might be regarded as a
social process of agreement of a group with a model,
represented by the signal. While the analogy is simi-
lar with the one of swarms with leaders, it is still diff-
erent, because the leaders are assumed to be influ-
enced by the rest of the group, while the model acts
independently from the behavior of the ‘followers’
group.
5 CONCLUSIONS
The HSA is essentially a new nonlinear filtering algo-
rithm derived as a combination of several approaches
in the literature and with a method of mapping the
signal filtering process into a swarm dynamics. The
HSA filtering was demonstrated on a set of bench-
mark ECG signals with intrinsic and added noises.
The results were compared with those obtained with
the average and median filters.
The hunting swarm method may work remarkably
well when the parameters of the swarm are trimmed
according to the processed signal and noise peculiari-
ties. However, the trimming procedure is not enough
transparent at this stage of development and the use
of genetic algorithms or other evolutionary method to
improve the behavior of the swarm is desirable. The
main advantage is that the HS filters leave the signals
that have fast as well as slowly varying regions only
slightly altered, while removing a consistent part of
the noise. In this respect, we found that the HS filters
behave better than the basic average and median filters
and combinations of them. We conclude that the HSA
might be a strong candidate in filtering signals with
non-stationary, wide bandwidth noise, where simpler
filters can not cope. Further research is needed to ex-
tensively compare the swarm-based filters with other
types of nonlinear filters.
ACKNOWLEDGEMENTS
I thank Dr. David Malan and Professor Leslie Valiant
for essential advice and critics. Also, I thank the two
anonymous referees for very useful comments.
REFERENCES
Almenar, V. and Albiol, A. (1999). A new adaptive scheme
for e.c.g. enhancement. Signal Processing, 75(3):253
– 263.
Bansal, D., Khan, M., and Salhan, A. K. (2009). A com-
puter based wireless system for online acquisition,
monitoring and digital processing of ecg waveforms.
Computers in Biology and Medicine, 39(4):361 – 367.
Goldberger, A. L., Amaral, L. A. N., Glass, L., Hausdorff,
J. M., Ivanov, P. C., Mark, R. G., Mietus, J. E., Moody,
BIOSIGNALS 2011 - International Conference on Bio-inspired Systems and Signal Processing
418
G. B., Peng, C.-K., and Stanley, H. E. (2000 (June
13)). PhysioBank, PhysioToolkit, and PhysioNet:
Components of a new research resource for com-
plex physiologic signals. Circulation, 101(23):e215–
e220. Circulation Electronic Pages: http://
circ.ahajournals.org/cgi/content/full/101/23/e215.
Kim, D. H. (2008). Self-organization of swarm systems
by association. International Journal of Control, Au-
tomation, and Systems, 6(2):253–262. April 2008.
Korrek, M. and Nizam, A. (2010). Clustering m.i.t.-b.i.h. ar-
rhythmias with ant colony optimization using time do-
main and p.c.a. compressed wavelet coefficients. Dig-
ital Signal Processing, 20(4):1050 – 1060.
Kotas, M. (2007). Projective filtering of time-aligned
ecg beats for repolarization duration measurement.
Computer Methods and Programs in Biomedicine,
85(2):115 – 123.
Leski, J. M. and Henzel, N. (2005). Ecg baseline wander
and powerline interference reduction using nonlinear
filter bank. Signal Processing, 85(4):781 – 793.
Reza Olfati-Saber, J. A. F. and Murray, R. M. (2007). Con-
sensus and cooperation in networked multi-agent sys-
tems. Proceedings of the IEEE, 95(1):215–233.
Teodorescu, H. and Malan, D. (2010). Image re-morphing,
noise removal and feature extraction with swarm al-
gorithm (poster). Mathematical Methods in Systems
Biology, Israel, Jan. 2010.
Yan, J., Lu, Y., Liu, J., Wu, X., and Xu, Y. (2010). Self-
adaptive model-based ecg denoising using features ex-
tracted by mean shift algorithm. Biomedical Signal
Processing and Control, 5(2):103 – 113.
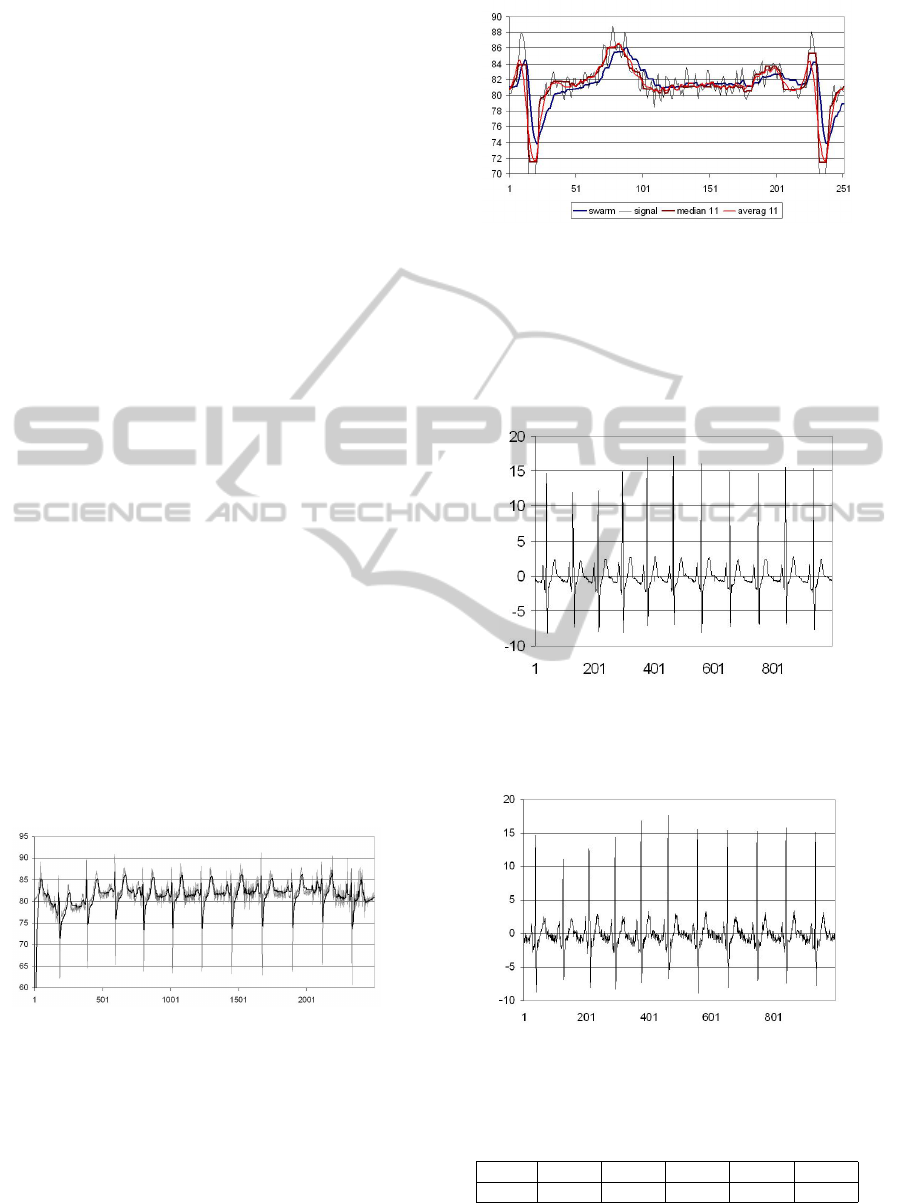
APPENDIX
In the appendix we present a few more graphical re-
sults of filtering, with details.
Figure 10: Result for the signal Fantasia f1o03 with a AHS
with η
1
= 3, η
2
= 4, µ = 0.75,η
1
= 3,η
2
= 4.
Comparison of swarm filter, average filter and me-
dian filter. The parameters of the swarm are: Nmax =
55, number of time steps N
Timesteps
= 1001, δ = 1.20,
γ = 0.850,zeta = 3.89, phi
max
= 0.785398, friction
coefficient µ = 0.250, amplification inter-agent A =
2.40, amplification prey-agent AA = 0.80, amplifica-
tion prey-agent second order term AB = 0.000020,
amplification prey-agent AC = 0.60, amplification
Figure 11: Comparison of median, average and swarm fil-
ters. The swarm produces a slightly smoother signal. Signal
Fantasia f1o03, η
1
= 3, η
2
= 4, µ = 0.75.
adaptive center swarm C = 1.30, adaptation distance
D = 1.20, Noise amplitude Anoise = 0.0005.
The average, median and swarm filters have been
applied with rectangular windows.
Figure 12: Comparison of median, average and swarm fil-
ters. The swarm produces a slightly smoother signal. Sig-
nal Apnea ECH A01 (µ = 0.25, η
1
= 3, η
2
= 4, noise factor
0.0005.
Figure 13: Noisy signal Apnea ECG A01, noise factor
00005.
Table 3: MSE errors of the swarm filter (delay τ = 3), for
various values of the friction coefficient. Signal Apnea ECG
A01.
µ 0.15 0.20 0.25 0.30 0.35
MSE 2.213 1.944 1.870 1.935 2.009
The next figure shows details of AHS filtering the
signal Fantasia 1o03.
A COLLECTIVE BIOLOGICAL PROCESSING ALGORITHM FOR ECG SIGNALS
419
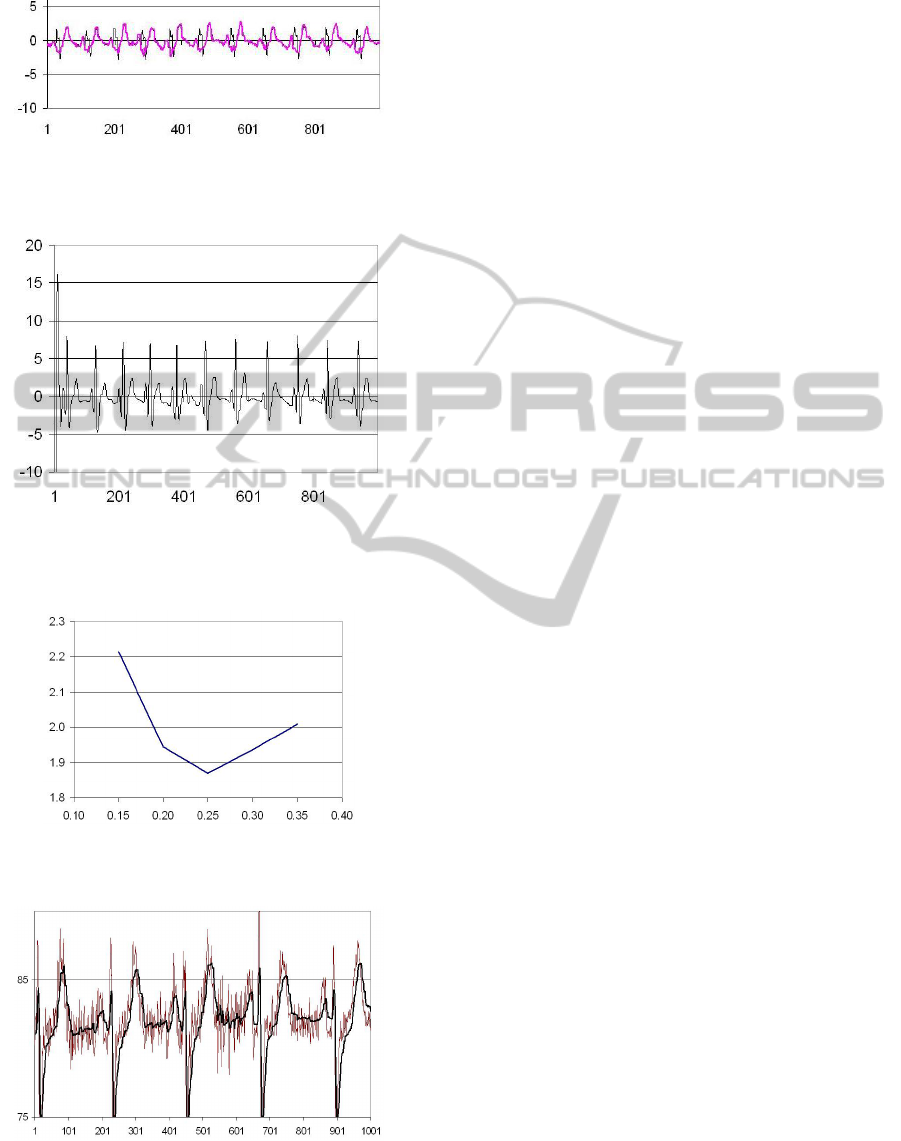
Figure 14: Average and median filters, window of 11 sam-
ples, centered. Signal Apnea ECG A01, noise factor 00005.
Figure 15: Result of filtering the signal Apnea ECG A01
with the parameters µ = 0.25, η
1
= 3, η
2
= 4 for noise
0.0005.
Figure 16: Variation of MSE as a function of the friction
coefficient µ. Signal Apnea ECG A01.
Figure 17: details of AHS filtering the signal Fantasia 1o03.
Friction coefficient µ = 0.75.
BIOSIGNALS 2011 - International Conference on Bio-inspired Systems and Signal Processing
420
