
FEATURE INDUCTION OF LINEAR-CHAIN CONDITIONAL
RANDOM FIELDS
A Study based on a Simulation
Dapeng Zhang and Bernhard Nebel
Department of Computer Science, University of Freiburg, Georges-Khler-Allee Geb. 52, Baden-Wrttemberg, Germany
Keywords:
Conditional random fields, CRF queue, Feature induction.
Abstract:
Conditional Random Fields (CRFs) is a probabilistic framework for labeling sequential data. Several ap-
proaches were developed to automatically induce features for CRFs. They have been successfully applied in
real-world applications, e.g. in natural language processing. The work described in this paper was originally
motivated by processing the sequence data of table soccer games. As labeling such data is very time consum-
ing, we developed a sequence generator (simulation), which creates an extra phase to explore several basic
issues of the feature induction of linear-chain CRFs. First, we generated data sets with different configurations
of overlapped and conjunct atomic features, and discussed how these factors affect the induction. Then, a
reduction step was integrated into the induction which maintained the prediction accuracy and saved the com-
putational power. Finally, we developed an approach which consists of a queue of CRFs. The experiments
show that the CRF queue achieves better results on the data sets in all the configurations.
1 INTRODUCTION
In natural language processing, a sentence (a se-
quence of words) needs to be “understood” by a com-
puter. An important task is to label the phrases with
e.g. noun, verb, or preposition in the sentences, map-
ping the segments of the words to the labels. In
robotics, agents are equipped with sensors in order
to acquire the environment using measurements of
the surroundings. The task of labeling is to iden-
tify the states according to the temporal sensor data.
The states are normally encoded in a vector of vari-
ables with discrete values. Similar applications can
be found in image processing and in computational
genetics.
Researchers have developed several approaches
for the sequential labeling tasks. Hidden Markov
Models (HMMs), for example, is a well-developed
generative model suitable for such a task. The infer-
ence of HMMs is based upon joint probabilities (Ra-
biner, 1990). Compared to HMMs, Conditional Ran-
dom Fields (CRFs) has a shorter history. It was first
proposed by (Lafferty et al., 2001), then gained pop-
ularity quickly. CRFs is a discriminative model based
on conditioned probabilities. In CRFs, a hidden label
is globally conditioned on all the observations in the
sequence. CRFs outperformed HMMs in the experi-
ments on the benchmarks in natural language process-
ing (Lafferty et al., 2001).
Feature induction of CRFs was first introduced
by (McCallum, 2003). As training CRFs requires
considerable computational power, the induction is
mainly about how to define some more efficient eval-
uations for incrementally inducing the feature func-
tions of CRFs. The method of McCallum was tested
on name entity recognition and noun phrases segmen-
tation. It resulted in comparable prediction accuracy
to the approaches other than CRFs(McCallum, 2003).
There are a few further works on the topic. In (Diet-
terich et al., 2004), the boosting algorithm is embod-
ied for simultaneously inducing features and training
CRFs. All these works experimented on the same
synthetic data, which served as a testbed for the com-
parison.
Our research was originally motivated by the ex-
planation of the data of table soccer games. The
sequential game data is made available via a game
recorder (Zhang and Hornung, 2008). The labels are
the actions of human players e.g. lock, attack, block,
pass, and dribble. These data considerablly differ
from the synthetic data used by the authors mentioned
above. At each time slice, the measurements are en-
coded in a vector of Boolean variables. Each skill
of human players consists of hundreds of such time
230
Zhang D. and Nebel B..
FEATURE INDUCTION OF LINEAR-CHAIN CONDITIONAL RANDOM FIELDS - A Study based on a Simulation.
DOI: 10.5220/0003144102300235
In Proceedings of the 3rd International Conference on Agents and Artificial Intelligence (ICAART-2011), pages 230-235
ISBN: 978-989-8425-40-9
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
slices. The annotation of the data is very exhaust-
ing. We have spent about 80 hours annotating 200
sequences, which are not enough for feature induc-
tion and supervised learning of CRFs. This difficulty
motivated the idea of the simulation.
A sequence generator was built to create data se-
quences, and to label them automatically, simulating
the data of the table soccer games. The core idea is to
create the first CRFs, with the feature functions and
the parameters generated randomly. Then, the sec-
ond CRFs can be obtained from the feature induction
methods as mentioned above. The first CRFs can thus
provide the information to estimate the second one
and the induction algorithm. This approach creates
an extra phase to explore several basic properties of
the feature induction of linear-chain CRFs. Conse-
quently, it fosters several further developments. The
highlights of this work are summarized as follows:
• We integrate a novel reduction step in the induc-
tion, which can keep the accuracy of the predic-
tion and decrease the number of feature functions,
thus making the learning more efficient.
• We develop a method to train a queue of CRF
models from the data. CRF queues guarantees
a no worse prediction accuracy than the single
CRFs. It outperformed the single ones on the data
sets in all the configurations. To the best of our
knowledge, we are the first who propose the idea
of CRF queues.
1.1 Related Works
Variable and feature selection is a well-developed re-
search area. Guyon summarized the issues and the
main approaches in the area in (Guyon and Elisse-
eff, 2003). If we put the specific CRFs problem into
a more general context, many ideas and methods can
be used. For example, feature reduction is widely em-
ployed in this area. To our knowledge, it is not yet
applied to CRFs.
We found only a few works about feature induc-
tion of CRFs. Chen et al. compared a gradient
based approach (Chen et al., 2009) to the McCal-
lum method. Both approaches use the framework
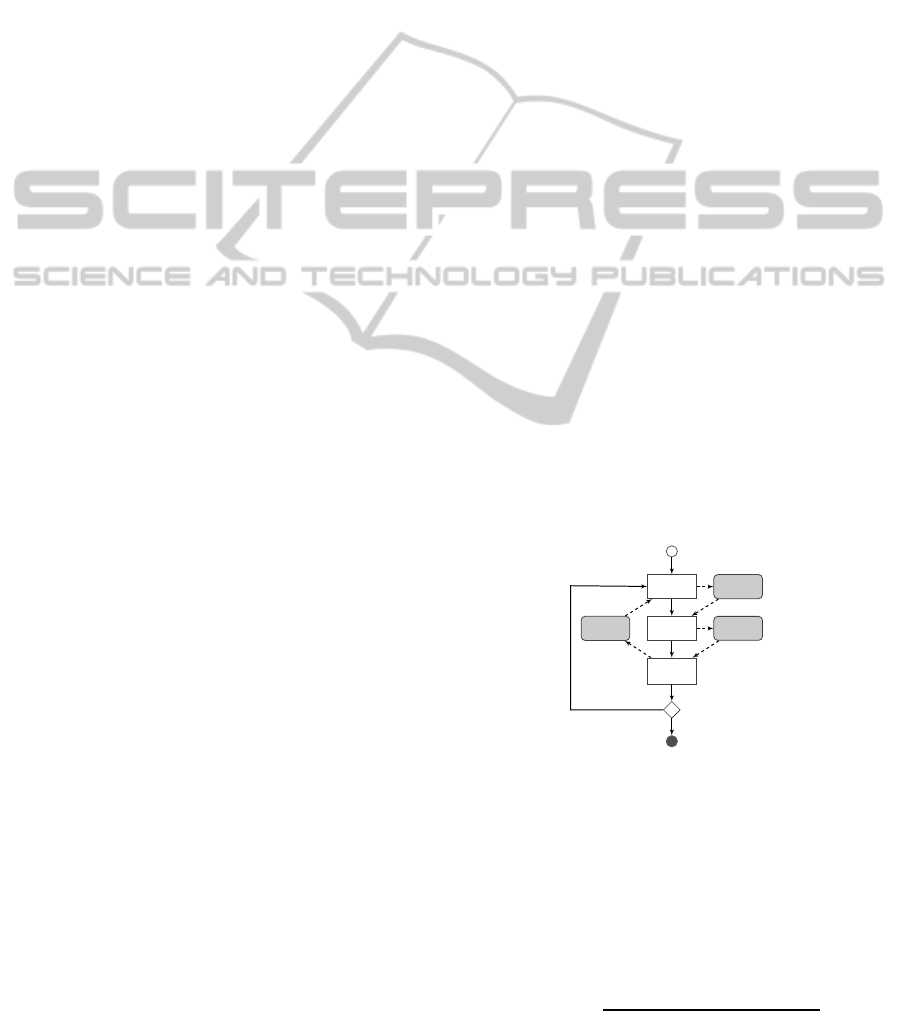
shown in Figure 1. In candidate evaluation, the gra-
dient based approach searches for the candidates that
make the objective function decrease fastest. Instead
of simply counting in the observation test, some re-
searchers integrated the boosting method (Dietterich
et al., 2004). The approaches in this direction can si-
multaneously induce features and train CRFs, which
have the more compact model, and therefore being ef-
ficient in the computation.
Our implementation is based on a CRF training
algorithm - Stochastic Meta Descent (SMD) (Vish-
wanathan et al., 2006), and the feature induction
framework by McCallum. The experiment platform
was implemented according to the descriptions in the
publications. We did not use any existing source code
from the authors or the open source toolkit via Inter-
net. The main reason is that the sequential data in this
work are very different from the data in the synthetic
benchmarks. In addition, building a platform from
scratch creates more chances to find unique and novel
ideas.
2 PRELIMINARIES
A game recorder was developed to record table soc-
cer games of human (Zhang and Hornung, 2008). The
data are collected from 14 sensors, which are mounted
on a regular game table. They measure the posi-
tion and angle of each game rod, and the position
of the game ball. The Frequency of the recorder is
about 200Hz. The sensor data were transferred to 52
Boolean variables via a discretization method. The
labeling task is to identify the skills of human.
In this work, we define the data by using a typ-
ical notation in data classification. The sequential
data has the form (X,Y), where X is an observation
sequence (B
1
,B
2
,...,B
I
) and Y is the state sequence.
Y = (y
1
,y
2
,...,y
I
), where I is the length. At each state
y
i
, a corresponding B
i
can be observed, which is a
vector of Boolean variables, B
i
= (b
i,1
,b
i,2
,...,b
i,C
),
where C is the number of the variables.
Figure 1: The Feature Induction of CRFs.
Conditional Random Fields is an undirected
graphic model in the exponential family. The clique
decomposition of CRFs supports the inference of the
distributes in an arbitrary graph structure. We focus
on linear-chain structure in this paper. In CRFs, the
probabilities of a sequence of labels Y given the ob-
servations X are defined in the following equation.
p(Y|X) =
exp(
∑
I
i=1
Θ·F(y
i−1
,y
i
,X))
Z(X)
(1)
FEATURE INDUCTION OF LINEAR-CHAIN CONDITIONAL RANDOM FIELDS - A Study based on a Simulation
231

The parameters Θ of CRFs can be estimated by
a training process, in which F is assumed to be
known. Given the training data D = (X,Y), where
X = {X
1
,X
2
,...,X
N
}, Y = {Y
1
,Y
2
,...,Y
N
}, the train-
ing algorithm maximizes the likelihood of the CRF
model.
Θ
∗
= argmax
Θ
N
∑
n=1
p(Y
n
|X
n
) (2)
Feature induction is a difficult problem because
training CRFs requires considerable computational
power. In McCallum’s approach, there are mainly
three layers of the evaluations (McCallum, 2003),
shown as three rectangles in the center of Figure 1.
From top to bottom, each step to the lower layer re-
quires more computational powers of several levels of
significance. In candidate evaluation, each candidate
is evaluated by measuring how much it can increase
the gain G( f
K+1
), given in Equation 3.
G( f
K+1
) = max
θ
K+1
N
∑
n=1
(p
f
K+1
(Y
n
|X
n
) − p(Y
n
|X
n
)) (3)
Here p
f
K+1
is from the CRFs that includes an extra
candidate f
K+1
. Its weight θ
K+1
can be calculated
by fixing Θ so that the evaluation can be done much
faster than training the whole CRFs.
3 SIMULATION
A CRF model describes a stochastic process, which
reveals the relations among the observations and the
hidden labels. In the training process, the success of
the CRFs hints that the acquired stochastic process
matches the patterns in the data. First the training data
are avaiable, then the CRFs is trained from them. The
idea of the simulation goes the retrograde way. First
a CRFs is generated, then it can be used to compute
the hidden labels of any randomly generated observa-
tions. The following is the assumption which bridges
the simulation and the simulated process.
• The stochastic processes in the target system
can be described as a CRF model.
The simulation is shown as the upper row of the
boxes in Figure 2. There are mainly two algorithms.
A CRF model is generated by the model generator.
The Simulation provides a platform for studying a
wide range of CRFs. After we exploring on differ-
ent situations, five configurations {S
1
,S
2
,S
3
,S
4
,S
5
}
are carefully chosen, which are challenging for the
induction issues, being not too hard or too easy. The
configurations are designed for the comparisons of
Figure 2: Trainning of CRFs with the shared features.
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Trained Model Simulated Model
Right Sequence Probability
Wrong Sequence Probability
Prediction Accuracy
Figure 3: A comparison to
the simulated Models.
0.6
0.7
0.8
0.9
1
S1 S2 S3 S4 S5
Prediction Accuracy (on Sequences)
minimum
average
maximum
Figure 4: The accuracy of
the trained CRFs.
the different levels of the conjunctions and the inter-
dependencies.
The simulation was run to create the following
data: 100 data sets for each configuration S
i
. Each
set contains a training set of 1000 sequences, and a
test set of 500 sequences.
3.1 The Trained CRFs
The experiments are based on 8 computers, each with
8 AMD cores at 2.3GHz and 32G memory. These
CPUs are driven by a grid system, on which 64 tasks
can be run in parallel. The experiments described in
this paper altogether took about 14 days in the grid
system.
In the first experiment, we assume F is known.
Figure 2 shows the scenario. The training algo-
rithm (SMD) was run for maximum 10000 iterations
(batches) on each data set, so that the resulted CRFs
are well-trained. The trained model and the simulated
model are compared in three aspects. The results are
shown in Figure 3. We denote the correct sequence
probability as p
r
, and p
w
is the wrong probability.
The prediction accuracy is the rate of the correct se-
quences. The values in the figure are the average val-
ues over all 500 models and the data sets.
We can summarize the observations as follows:
The simulated CRFs cannot be cloned via supervised
learning. With the shared feature function, the trained
CRFs can achieve an average accuracy of about 90%.
The detailed information on the trained models
over the configurations are shown in Figure 4. We
inspect the prediction accuracy of the trained models.
By using each configuration, 100 simulated models
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
232
0.4
0.6
0.8
1
0.05 0.15 0.25 0.35 0.45 0.55 0.65 0.75 0.85 0.95
0
0.2
0.4
Prediction Accuracy (on Sequences)
Data Distribution
Most Probable Path Probability
S1
S2
S3
S4
S5
Figure 5: The distributions of the accuracy of the prediction
over the probabilities of the most probable path.
were generated. “Minimum” means the trained model
performed worst in the estimation, while “maximum”
is the best. The average performances of the trained
models are roughly the same over the five configura-
tions. The performance of a trained CRFs depends on
both F and Θ of the simulated model. Θ itself has
significant impact on the performance.
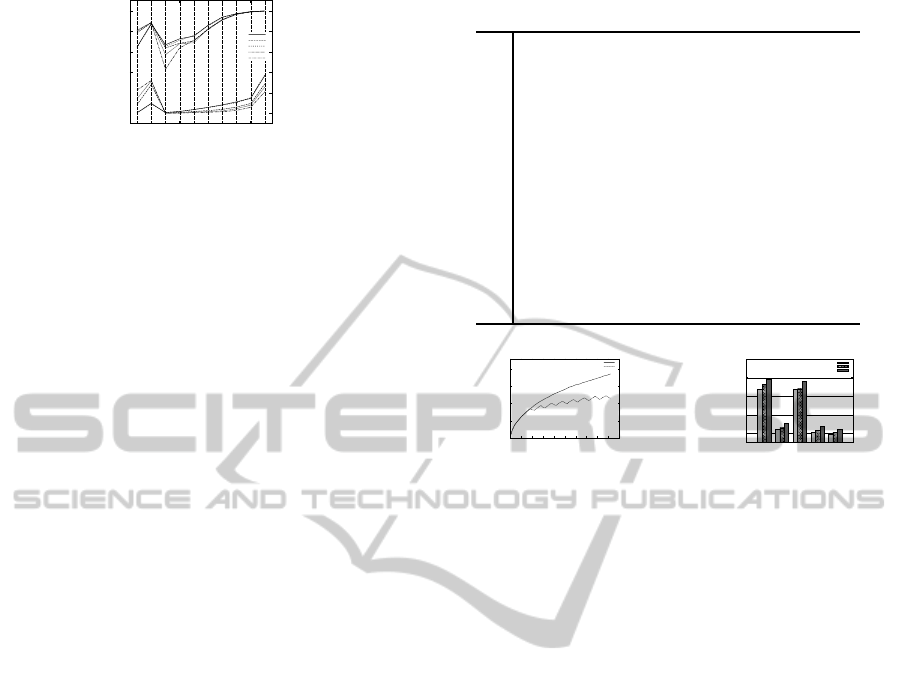
The trained CRFs can not only compute the most
possible explanation for an input X, but also associate
this explanation with a probability value. In Figure
5, we show the relations between the prediction accu-
racy and the probability of the most probable paths.
The figure consists of two parts. The upper part is
about the accuracy of the prediction. The lower part
is the distributions of the data in each grid.
These distributions are interesting. If there is an
axis for the probability of the most probable path, the
training based on maximum likelihood pushes a large
number of sequences in the training set towards the
higher value direction of the axis. If the axis is divided
into two parts at the middle point, the higher part has
a higher accuracy than the lower part.
4 FEATURE INDUCTION
The induction process iterates over three steps. In
this section, we develop the forth step: feature re-
duction. A subset of features F
r
is to be removed
from F, where F is the set of so far induced features,
F
r
⊂ F. For each f
k
∈ F, a gain value G
r
is defined
as a measurement for the reduction. We modified the
gain G( f
K+1
) in Equation 3 for the reduction. The
difference is f
K+1
/∈ F, while f
k
∈ F. G is calculated
in iterations before the traing of the CRFs; G
r
can be
calculated without any iteration after the training. In
the reduction, the features with a G
r
lower than a pre-
defined threshold C
0
can be removed.
G
r
( f
k
) =
N
∑
n=1
(p(Y
n
|X
n
) − p
θ
k
=0
(Y
n
|X
n
)) (4)
F
′
= F − { f
k
|G
r
( f
k
) < C
0
} (5)
The induction algorithm with feature reduction is
written in pseudo-code in Table 1. The reduction is
Table 1: Algorithm: Inducing Features with Reduction.
input: Training Examples (X,Y)
output: CRFs: (F, Θ)
1 F
0,I
0
=
/
0
2 for i
0
= 1...I
0
do
3 F
i
0
,0
= F
i
0
−1,I
0
4 for i
1
= 1...I
1
do
5 F
i
0
,i
1
= F
i
0
,i
1
−1
∪
{new Features from the Observation Test}
6 Compute Θ
i
0
,i
1
on F
i
0
,i
1
via Equation 2
7 end
8 Reducing F
i
0
,I
1
via Equation 5
9 end
10 Choose F = F
i
0
,i
1
where F
i
0
,i
1
yield to the best
performance on the (X,Y)
11 Compute Θ on {F
i
0
,i
1
,Θ
i
0
,i
1
} via Equation 2
12 return (F,Θ)
0.5
1
1.5
2
0 5 10 15 20 25 30 35 40 45 50
Average Time Spent (in seconds)
Iterations of Inducing Features
Incremental Inducing
with Feature Reduction
Figure 6: Time spent on the
training.
0.45
0.55
0.65
0.75
S1 S2 S3 S4 S5
Prediction Accuracy (on Sequences)
Incremental Inducing
with Reducing
CRF queue
Figure 7: The Evaluation.
called after several iterations of observation test, can-
didate evaluation, and CRFs training. The algorithm
stops after some iterations of the reduction steps.
In the training process, each feature function has
a weight. Intuitively, the feature reduction can reduce
the number of parameters. Consequently, it should
save the computational power required by the train-
ing. The second experiment is designed for this com-
parison. The feature induction algorithms are run in-
dependently with and without the reduction for 50 it-
erations. Figure 6 shows the results.
In the figure, the horizontal is the function calls
of the training. The vertical is average time spent on
processing 100 batches of SMD. During the induction
process, features are added to F incrementally. The
training thus requires more and more time to compute
the weights of the feature functions. The dotted curve
shows the performance of the algorithm with feature
reduction. It is serrated because the reduction step is
not called in every iteration. The reduction step can
save the computational power more than 30% in the
long run.
Although the reduction makes the induction pro-
cess faster, does it decrease the prediction accuracy
of the resulted CRFs? The third experiment is de-
signed to investigate this issue. The induction algo-
rithms with and without the reduction were run inde-
pendently over the 5 × 100 training sets. The models
which yield to the best performance on the training
set are selected for the evaluation. The results are il-
lustrated in Figure 7. Based on the average results,
FEATURE INDUCTION OF LINEAR-CHAIN CONDITIONAL RANDOM FIELDS - A Study based on a Simulation
233

the algorithm with the reduction outperformedthe one
without reduction in all the configurations.
In Figure 7, the performances of the models can
be roughly classified into two categories: {S
1
,S
3
} the
configurations with single features, and {S
2
,S
4
,S
5
}
the configurationswith conjunctivefeatures. The con-
junctive features of the simulated models make the in-
duction tasks more difficult. The feature overlapping
of the simulated models [only] slightly affects the dif-
ficulties of the induction in the experiments.
As illustrated in Figure 6, the algorithm with the
reduction runs faster because the number of feature
functions is lower. How many features were induced
in the experiments? In the upper part of Figure 8, we
show the results. The “13” comes from the simulated
models, which serves as a based line for the compar-
ison. The learning induced the features several times
more than the target features in the simulated mod-
els. Surprisingly, it did not cause a severe overfitting
problem. For the induction with the reduction, com-
pared to the configurations with conjunctive features,
more features were induced in the configurations with
a single feature.
4.1 CRF Queues
In Section 3.1, the experiments showed that along the
axis of the probabilities of the most probable paths, a
higher value has a higher accuracy. The basic idea of
CRF queues is to build a queue of CRF models, and
each model uses the higher probability part to do the
prediction. If the probability of a sequence is lower
than a threshold t, the data are passed to next model.
r(D,t) = {(X
′
,Y
′
)|(X
′
,Y
′
) ∈ D, p(Y
′′
|X
′
) > t)}
If D(X,Y) is the training set, a filter function is de-
fined as follows, whereY
′′
is the most probable expla-
nation of X
′
. We define D
′
⊂ r(D,t) as the set of the
sequences which are correctly explained. The thresh-
old t
∗
can be calculated via:
t
∗
∼
=
arg
t
|D
′
|
|r(D,t)|
) = C
1
(6)
In the equation, C
1
is a selected accuracy higher
than the accuracy of the first CRFs in the queue. In
order to build the queue, assume the first CRF model
is already induced via the algorithm shown in Table
1 – we can then use t
∗
to filter the training set for
the next model in the queue. The sequences with a
probability of the most probable explanation higher
than t
∗
are removed from the training set. The rests
are used to induce the next model in the queue.
D
m+1
= D
m
− r(D
m
,t
∗
) (7)
Table 2: Algorithm: Inducing CRF Queue from Data.
input: Training Examples D(X,Y)
output: Learned CRF Queue
Q((F
m
,Θ
m
),t
m
),m = 1...M
1 D
1
= D; Q
0
= (
/
0, ⊥)
2 for m=1...M do
3 Compute (F
m
,Θ
m
) on D
m
via table 1
4 Compute t
m
on D
m
via Equation 6
5 Q
m
= Q
m−1
∪ ((F
m
,Θ
m
),t
m
)
6 Compute D
m+1
by Applying ((F
m
,Θ
m
),t
m
)
on D
m
via Equation 7
7 end
8 return Q
M
20
40
60
80
100
120
13
Incremental Inducing
with Feature Reduction
2
2.5
3
3.5
4
S1 S2 S3 S4 S5
3
The Number of CRFs in the queue
Figure 8: feature functions
and CRFs in the queue.
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
CRFs-1 CRFs-2 CRFs-3 CRFs-4 CRFs-5
Train Set Size
Accuracy of the Model
Accuracy of the Filtered Model
Accuracy of the Queue
Figure 9: An Example of
CRF Queue.
The algorithm of inducing CRF queues is written
in pseudo-code in Table 2. In each iteration, a CRF
model is built; the threshold is computed; and the
training set is filtered. The algorithm is run until no
CRFs with the required accuracy (C
1
) can be induced
from the filtered data.
A sequence X can be explained by the queue in the
following way. X is explained by the first model p
1
in
the queue. If p
1
(Y
′
|X) > t
1
, where t
1
is the threshold,
then Y
′
is the explanation of the X. Otherwise, X is
passed to the second model. If X cannot be explained
by any of the models in the queue, the model with the
highest accuracy is chosen to explain the sequence.
Figure 9 shows an example of the CRF queue.
There are 5 models altogether in the queue. The
first column in the figure shows the training set used
for the model. In the experiment, each training set
consists of 1000 sequences. 1.0 means all of them are
used to induce CRF-1. Along the queue, fewer and
fewer data are passed to the next model. CRF-5 is
trained by less than 300 sequences.
The second column in the figure illustrates the per-
formance of each model on the training set. To our
surprise, so many models can be induced with the re-
duced training sets. Their performances on the train-
ing data can be improved by inducing a new set of the
features. The third column is the accuracy of using
the model with the threshold t
m
, we call it the filtered
model. t
m
defines the higher part along the axis of the
probability of the most probable paths. CRF queues
provide a more accurate prediction because the third
column is higher than the second one. The fourth
column is the performance of the CRF queue. It is
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
234

computed by using the current acquired models. For
example, in CRF-3, the first, second, and third mod-
els build the queue. Along the queue, the evaluations
are better and better. In CRF-1, the second column is
higher than the fourth one because of overfitting. The
performance of the model is better on the training set
than on the test set.
In the example, if X cannot be explained with
a probability higher than the threshold t
m
by all the
models in the queue, CRFs-5 should be chosen to ex-
plain X. The reason is that its second column is the
highest one over the second columns of all the mod-
els. To summarize, the third columns of the first four
models and the second column of the fifth model are
chosen to explain X. Their overall performance, the
fourth column in CRFs-5, is lower than any of these
columns because of overfitting. From another point of
view, the values of the chosen columns are based on
the training data; the overall estimation of the queue
is the evaluation on the test set.
The fourth experiment was designed to evalu-
ate CRF queue. The algorithm shown in Table 2
was run on all data sets. The average results over
5 configurations are shown as the third columns in
Figure 7. The CRF queue outperformed the single
model approaches for about 4% on average in all con-
figurations. We show the number of models in the
queue in the lower parts in Figure 8. The results
are averaged over the 100 sets in each configurations.
The number of models is above 3, which hints that
the queue works well in most cases. {S1, S3} has a
shorter queue because the performances of the single
model approaches in these configurations are better,
as shown in Figure 7. The CRF queue is shorter when
the single model approaches work better.
5 CONCLUSIONS
In this paper, we constructed a simulation fran-
mework to investigate the issues of inducing features
of linear-chain CRFs. The simulation helps to gain
a new phase to compare the simulated CRFs and the
induced CRFs. We used a large amount of experi-
ments to explore the properties of the learned CRFs.
Moreover, we developed a feature reduction method
that can be integrated into the induction process, and a
queue of CRF models can be constructed which yields
a better performance. CRF queues guarantees accu-
racy no worse than the single model approaches.
We did not use the open source CRF toolkit and
did not yet experiment on the benchmarks. In the fu-
ture, we will adapt our code to process the benchmark
data. The simulation framework sets a basis for in-
teresting research on CRFs in several directions. It
would be interesting to explore the bootstrap issues.
In CRF queue, we defined a method to filter the train-
ing set. Another method could be to construct a deci-
sion tree to first classify the training set, then use the
data in each class to induce CRFs.
REFERENCES
Chen, M., Chen, Y., Brent, M. R., and Tenney, A. E. (2009).
Gradient-based feature selection for conditional ran-
dom fields and its applications in computational ge-
netics. In ICTAI ’09: Proceedings of the 2009 21st
IEEE International Conference on Tools with Artifi-
cial Intelligence, pages 750–757, Washington, DC,
USA. IEEE Computer Society.
Dietterich, T. G., Ashenfelter, A., and Bulatov, Y. (2004).
Training conditional random fields via gradient tree
boosting. In ICML ’04: Proceedings of the twenty-
first international conference on Machine learning,
page 28, New York, NY, USA. ACM.
Guyon, I. and Elisseeff, A. (2003). An introduction to
variable and feature selection. J. Mach. Learn. Res.,
3:1157–1182.
Lafferty, J., McCallum, A., and Pereira, F. (2001). Con-
ditional random fields: Probabilistic models for seg-
menting and labeling sequence data. Proc. 18th Inter-
national Conf. on Machine Learning, pages 282–289.
McCallum, A. (2003). Efficiently inducing features of con-
ditional random fields. In UAI, pages 403–410.
Rabiner, L. R. (1990). A tutorial on hidden markov models
and selected applications in speech recognition. pages
267–296.
Vishwanathan, S. V. N., Schraudolph, N. N., Schmidt,
M. W., and Murphy, K. P. (2006). Accelerated train-
ing of conditional random fields with stochastic gra-
dient methods. In ICML ’06: Proceedings of the 23rd
international conference on Machine learning, pages
969–976, New York, NY, USA. ACM.
Zhang, D. and Hornung, A. (2008). A table soccer game
recorder. In Video Proceedings of the IEEE/RSJ In-
ternational Conference on Intelligent Robots and Sys-
tems (IROS).
FEATURE INDUCTION OF LINEAR-CHAIN CONDITIONAL RANDOM FIELDS - A Study based on a Simulation
235
