
EPISTEMIC REASONING FOR AMBIENT INTELLIGENCE
Theodore Patkos and Dimitris Plexousakis
Institute of Computer Science, FO.R.T.H., Heraklion Crete, Greece
Keywords:
Ambient intelligence, Epistemic reasoning, Reasoning about action and change.
Abstract:
Ambient Intelligence is an emerging discipline that requires the integration of expertise from a multitude of
scientific fields. The role of Artificial Intelligence is crucial not only for bringing intelligence to everyday
environments, but also for providing the means for the different disciplines to collaborate. In this paper we
highlight the importance of reasoning under partial observability in such dynamic and context-rich domains
and illustrate the integration of an epistemic theory to an operational Ambient Intelligence infrastructure.
1 INTRODUCTION
Ambient Intelligence (AmI) is an emerging discipline
that introduces novel and highly demanding chal-
lenges. Within AmI environments a multitude of
smart entities operate autonomously and perform ac-
tions, motivated by their own view of the user’s cur-
rent needs or intentions. Intelligent software agents
operating on smart devices or rational robots that are
assigned specific tasks are expected to perform long
sequences of context dependent actions; still, con-
text knowledge is not always available or accessible
in AmI spaces:
• AmI domains are highly dynamic and adaptive to
changes. Contextual information changes rapidly
and in a fashion that is not easily prefigured,
• contextual knowledge may not be readily avail-
able. Continuously sensing all desirable informa-
tion is impractical when executing long action se-
quences with resource constraint devices,
• context data often needs to be filtered and aggre-
gated (fused). As this task is typically assigned to
specialized components, mobile devices can uti-
lize context under certain accessibility, connectiv-
ity or even privacy restrictions,
• many context parameters that may act as precon-
ditions for actions, especially for composite ones,
are not directly acquired through sensing, rather
are fragments of high-level knowledge that re-
quires some form of reasoning to be performed.
As a result, agents inhabiting real-world AmI sys-
tems need to incorporate both epistemic and tempo-
ral reasoning skills; whenever sensing is not avail-
able or profitable, context knowledge needs to be de-
rived through commonsense inference, considering
the most recent information about the world and the
effects of observed actions. A formal model is imper-
ative to ensure that the behavior of all entities is prop-
erly regulated. In this paper we demonstrate how a re-
cently proposed epistemic action theory from the field
of cognitive robotics can contribute in facilitating dif-
ferent aspects of AmI. We report on our experiences
in participating in an ongoing AmI-related project at
the FORTH institute (Grammenos et al., 2009), hav-
ing encountered restrictions by other commonly used
approaches, such as rule-based reasoning, to handle
certain complex tasks. Our objective is to signify the
importance of epistemic reasoning for AmI and to ex-
hibit the ways that it contributes to our infrastructure.
The basic properties of the epistemic action theory
are discussed in Section 2. Sections 3 and 4 demon-
strate different aspects where epistemic reasoning can
be applied in an AmI domain, from the standpoint of a
centralized infrastructure and that of mobile devices,
respectively. Section 5 describes implementation is-
sues and the paper concludes in Section 6.
2 EPISTEMIC THEORY
The Discrete Event Calculus Knowledge Theory
(DECKT), thoroughly described in (Patkos and Plex-
ousakis, 2009), is a formal theory for reasoning about
knowledge, actions and causality. It builds on the
Event Calculus (Kowalski and Sergot, 1986) and ex-
242
Patkos T. and Plexousakis D..
EPISTEMIC REASONING FOR AMBIENT INTELLIGENCE.
DOI: 10.5220/0003149902420248
In Proceedings of the 3rd International Conference on Agents and Artificial Intelligence (ICAART-2011), pages 242-248
ISBN: 978-989-8425-40-9
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

tends it with epistemic capabilities enabling reason-
ing about a wide range of commonsense phenom-
ena, such as temporal and delayed knowledge ef-
fects, knowledge ramifications, concurrency, non-
determinism and others. It is a many-sorted first-order
language, where events indicate changes in the envi-
ronment, fluents denote time-varying properties and
a timepoint sort implements a linear time structure.
The Event Calculus defines predicates for expressing,
among others, which fluents hold when (HoldsAt),
what events happen (Happens) and which their ef-
fects are (Initiates, Terminates).
The theory employs the discrete time Event Calcu-
lus axiomatization described in (Mueller, 2006). It as-
sumes agents acting in dynamic environments, having
accurate but potentially incomplete knowledge and
able to perform knowledge-producing actions and ac-
tions with context-dependent effects. Knowledge is
treated as a fluent, namely the Knows fluent, which
expresses knowledge about fluents and fluent formu-
lae, obtained either from direct effects of actions or
indirectly through ramifications modeled as state con-
straints. For technical reasons, for direct effects the
auxiliary KP fluent (for ”knows persistently”) is used
that is related with the Knows fluent by the axiom
1
:
(KT2) HoldsAt(KP( f),t) ⇒ HoldsAt(Knows( f),t)
DECKT augments a domain axiomatization with a set
of meta-axioms describing epistemic derivations. For
instance, for positive effect axioms that specify un-
der what conditions action e initiates fluent f, i.e.,
V
i
HoldsAt( f
i
,t) ⇒ Initiates(e, f,t), DECKT intro-
duces the (KT3) set of axioms expressing that if the
conjunction of preconditions C = {
~
f
i
} is known then
after e the effect will be known to be true, such as:
(KT3.1)
V
f
i
∈C
HoldsAt(Knows( f
i
),t)∧
Happens(e,t) ⇒ Initiates(e, KP( f ),t)
In a similar fashion, the (KT5) axiom set cap-
tures the fact that if some precondition is un-
known while none is known to be false, then af-
ter e knowledge about the effect is lost. The ap-
proach proceeds analogously for negative effect ax-
ioms
V
i
HoldsAt( f
i
,t) ⇒ Terminates(e, f,t) and re-
lease axioms
V
i
HoldsAt( f
i
,t) ⇒ Releases(e, f,t).
The latter model non-deterministic effects, therefore
they result in loss of knowledge about the effect.
Knowledge-producing (sense) actions provide in-
formation about the truth value of fluents and, by def-
inition, cause no effect to the environment, instead
only affect the mental state of the agent:
(KT4) Initiates(sense( f), KPw( f),t)
1
Free variables are implicitly universally quantified.
Kw is an abbreviation for whether a fluent is
known (similarly for KPw): HoldsAt(Kw( f),t) ≡
HoldsAt(Knows( f),t) ∨ HoldsAt(Knows(¬ f),t)
Furthermore, the theory also axiomatizes so called
hidden causal dependencies (HCDs). HCDs are
created when executing actions with unknown
preconditions and capture the fact that in certain
cases, although knowledge about the effect is lost, it
becomes contingent on the preconditions; obtaining
knowledge about the latter through sensing can
provide information about whether the effect has
actually occurred. Consider the positive effect axiom
HoldsAt( f
′
,t) ⇒ Initiates(e, f,t), where fluent f
′
is unknown to the agent and f known to be false
at T (f may denote that a door is open, f
′
that a
robot stands in front of that door and e the action
of pushing forward gently). If e happens at T, f
becomes unknown at T + 1, as dictated by (KT5),
still a dependency between f
′
and f must be created
to declare that if we later sense any of them we can
infer information about the other, as long as no event
alters them in the meantime (either the robot was
standing in front of the door and opened it or the door
remained closed).
DECKT introduces the (KT6) set of axioms
that specify when HCDs are created or destroyed
and what knowledge is preserved when an HCD is
destroyed. For instance, for positive effect axioms
(KT6.1.1) below creates an appropriate implication
relation:
(KT6.1.1) ¬HoldsAt(Knows( f),t)∧
¬HoldsAt(Knows(
W
f
i
∈C
¬ f
i
),t)∧
W
f
i
∈C
[¬HoldsAt(Kw( f
i
),t)] ⇒
Initiates(e,KP( f ∨
W
f
j
∈C(t)
−
¬ f
j
),t)
where C(t)
−
denotes those precondition fluents that
are unknown to the agent at timepoint t. In a nut-
shell, DECKT augments the mental state of an agent
with a disjunctive knowledge formula, equivalent to
HoldsAt(Knows(
V
f
j
∈C(t)
−
f
j
⇒ f),t + 1), that en-
codes a notion of epistemic causality in the sense that
if future knowledge brings about (
V
f
j
∈C(t)
−
f
j
) it also
brings about f.
DECKT adopts an alternative representation for
knowledge that does not employ the possible worlds
semantics, which are computationally intensive and
not appropriate for practical implementations. In-
stead, its efficiency stems from the fact that HCDs,
which are based on a provably sound and complete
translation of possible worlds into implication rules,
are treated as ordinary fluents.
EPISTEMIC REASONING FOR AMBIENT INTELLIGENCE
243
3 AMI FRAMEWORK
In the next sections we demonstrate the benefits
of epistemic reasoning for AmI, by describing how
DECKT is employed within a large-scale AmI-related
project that is being conducted in our institute over the
last 2 years. The project integrates expertise from dif-
ferent laboratories that contribute a multitude of hard-
ware and software technologies; our work package
is assigned the task of designing and implementing
a reasoning framework for the AmI infrastructure.
3.1 Reasoning Framework Architecture
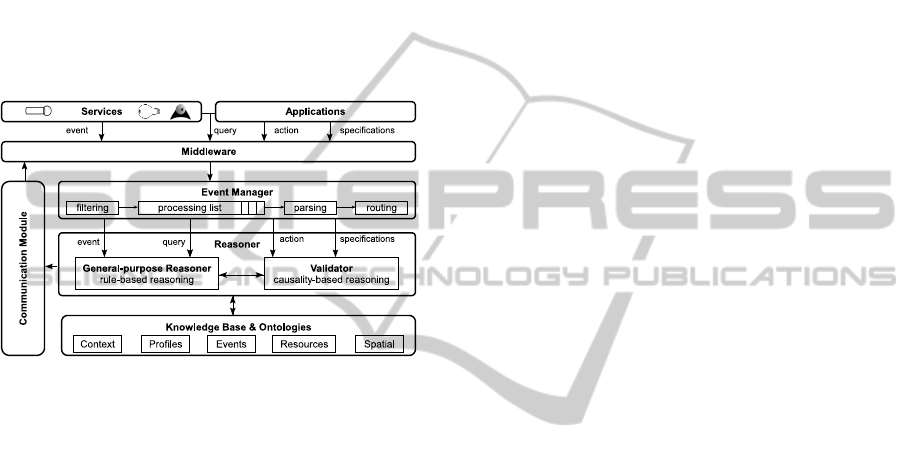
Figure 1: Event management framework architecture.
The design goals of our reasoning framework have
been the efficient representation, monitoring and dis-
semination of any low- or high-level contextual in-
formation in the AmI infrastructure, as well as the
support for a number of general-purpose and domain-
specific inference tasks. The need for hybrid ap-
proaches for such systems has already been recog-
nized (Bettini et al., 2009), still is mostly restricted
on specific aspects, such as for context inference (Bul-
foni et al., 2008). In our system we couple method-
ologies from the Semantic Web and the action theo-
ries domains and deploy the hybrid event-based rea-
soning architecture shown in Fig. 1, that comprises
three main components: the Event Manager that re-
ceives and processes incoming events from the am-
bient infrastructure, the Reasoner that can perform
both rule-based and causality-based inferencing, and
the Knowledge Base that stores semantic informa-
tion represented using ontology-based languages. A
middleware layer undertakes the role of connecting
applications and services developed by different re-
search parties and with diverse technologies. Ser-
vices denote standalone entities that implement spe-
cific functionalities, such as voice recognition, local-
ization, light management etc., whereas applications
group together service instances to provide an AmI
experience in smart spaces.
A number of ontologies capture the meaning
and relations of concepts regarding low-level con-
text acquired from sensors, high-levelcontextinferred
through rule-based reasoning, user and devices pro-
files and spatial features. High-level context, in par-
ticular, may concern a user’s emotional state, iden-
tity, intentions, location and others. Within our sys-
tem rule-based reasoning contributes to the design of
enhanced applications and also provides feedback to
services for sensor fusion purposes, in order to resolve
conflicts of ambiguous or imprecise context. On the
other hand, rule-based languages offer only limited
expressiveness to describe certain complex features,
such as compound actions. We utilize the Event Cal-
culus to formalize event operators for the construction
of composite events, characterized by their initiation
and termination occurrence times, as well as to de-
clare their effects and potential preconditions.
3.2 Partial Knowledge
During our involvement in the first phases of the
project, we recognized how crucial it is for the man-
agement of an AmI system to distinguish between
the rules that govern its behavior from the domain-
specific functionalities and restrictions, in order to en-
able efficient and dynamic adaptation to changes dur-
ing development. This need was primarily driven by
the fact that multiple research groups participate and
collaborate in parallel tasks, having different degrees
of contribution and therefore comprehension of the
general objectives and the system restrictions intro-
duced from other groups.
Towards that end, we implement a modular ap-
proach that distinguishes the rules that express sys-
tem policies and restrictions that guarantee a con-
sistent and error-free overall execution at all times,
from service specifications that change in frequent
time periods by developers, as well as from applica-
tion specifications that are usually under the responsi-
bility of non-experts who only possess partial knowl-
edge about the system restrictions. The specifications
of services, for instance, retrieved from the KB, are
axioms that describe the domain, such as:
Terminates(TurnOf fLight(l), LightOn(l),t)
Application descriptions express the intended be-
havior of an application as a narrative of context-
dependent action occurrences:
Happens(SitOn(chair),t) ∧
HoldsAt(LightOn(l),t) ⇒
Happens(TurnOf fLight(l),t) ∧
Happens(StartSlideshow(< file >, TV01),t)
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
244

Finally, system restrictions (or safety properties) cap-
ture assertions about attributes of system states that
must hold for every possible system execution. For
instance, the Localizer’s specifications require that no
change in lighting conditions should occur when in
Running mode, otherwise the camera-based localiza-
tion process may be destabilized:
HoldsAt(LocalizaterRunning(ROOM 23),t) ∧
HoldsAt(LocatedIn(light,ROOM 23),t) ⇒
HoldsAt(LightOn(light),t)
A core task of our frameworkis to verify that the spec-
ifications of AmI applications are in compliance with
the overall system restrictions and detect errors early
at the development phase. This analysis is performed
at design-time and can formally be defined as an ab-
ductive reasoning process to find a set P of permis-
sible actions that lead a consistent system to a state
where some of its constraints are violated, given a do-
main description D, an application description AP
i
for
application i and a set of system constraints C:
D∧AP
i
∧P|= ∃t¬C(t) where D∧AP
i
∧P is consistent
Russo et al. (2002) provided a fully decidable re-
duction of this abductive task. The absence of avail-
able knowledge about certain context parameters was
found to be a less likely contingency to consider by
developers and usually arises late at the evaluation
phase or even after deployment.
Example 1. Imagine that a developer uploads an ap-
plication description file to the system containing ax-
ioms such as the one mentioned above. After exe-
cuting the ApplicationCheck functionality of the Val-
idator to check for consistency with respect to sys-
tem restrictions already stored by service engineers,
potential violations are raised: whenever a user sits
on the chair the TurnOf fLight action is triggered
conflicting with the Localization service being at a
Running state. Moreover, the developer does not
consider the situation where the state of lights are
unknown due to some other application’s interven-
tion, i.e., when neither HoldsAt(LightOn(l),t) nor
¬HoldsAt(LightOn(l),t) are true. For the latter case
in particular, the appropriate epistemic counterpart
should be used, i.e., HoldsAt(Knows(LightOn(l),t))
and also a new axiom should be introduced to account
for lack of knowledge. DECKT enables the formal-
ization of such processes for deriving epistemic con-
clusions regarding the effects of actions.
Application verification is only one dimension of
the system management process and can be executed
at design-time and in isolation. Still, run-time action
validationis equally important and must be performed
considering the current state of the system, as well as
potential conflicts with other applications that might
request access to the same resources (e.g., speakers).
Causality-based reasoning is applied for high-levelre-
source management, as well as for uncertainty han-
dling due to ambiguous context or for determining
harmful ramifications of actions, which may cause
side-effects to the execution of other applications.
4 EPISTEMIC REASONING
FOR MOBILE DEVICES
Building on the centralized infrastructure already
available, our current efforts concentrate on transfer-
ring reasoning capabilities to mobile and resource-
constraint devices that operate in a smart space. Such
autonomous devices, capable of executing common-
sense tasks, constitute the core of the AmI vision, as
they take leading role in domains, such as ambient as-
sisted living for supporting individuals with cognitive
or physical impairments. For such devices reasoning
under partial knowledge is a critical factor, as they
experience substantial restrictions not only in storing
relevant contextual information, but even in accessing
it. We provide different aspects where DECKT can
contribute, adopting the personal assistant paradigm.
4.1 The Personal Assistant Paradigm
In a smart space every user is assumed to be equipped
with a virtual personal assistant, an intelligent agent
that can live in stationary or mobile devices that the
user interacts with, such as her PDA, cellphone etc,
and utilize relevant information in order to assist the
user. This assistant can be assigned different tasks:
it can be instructed to proactively or reactively devise
ways to accomplish user objectives that comply with
her needs, given the specifications of the smart space
(planning); it may assist the user while performing
certain tasks and explain the behavior of the system in
response to her actions (postdiction and model find-
ing); it can foresee the result of actions by predict-
ing the user’s intentions and provide relevant assis-
tance, e.g., suggestions or warnings (projection). The
agent can take advantage of the facilities of the smart
space based on certain privacy policies, such as sen-
sors, services and devices, still we should expect that
its knowledge about the environment is neither com-
plete nor constantly updated, for reasons that may be
related to limited resources, network reliability etc.
Uncertainty Handling. Apart from actions with
unknown preconditions that lead to lack of knowl-
edge about the effect, uncertainty is evident in differ-
EPISTEMIC REASONING FOR AMBIENT INTELLIGENCE
245

ent forms within an AmI environment. For instance,
given noisy conditions, it is common practice to ax-
iomatize the action of speaking voice commands into
a microphone as having non-deterministic effects
HoldsAt(Rec(mic),t) ∧ HoldsAt(Admin(u),t) ∧
HoldsAt(InFrontOf(u,door),t) ⇒
Releases(Speak(u, mic,”Open”), Open(door),t)
Even if the preconditions are known when the
command is given, axioms (KT5) will result in
¬HoldsAt(Kw(Open(door)),t + 1).
Temporal Knowledge. The consideration of the
temporal aspect of knowledge, such as knowing facts
for specified time intervals only, is a crucial aspect
in systems where temporal constraints are ubiquitous.
The very nature of most AmI environments involves
dynamically changing context, information becoming
outdated as time passes and events occurring at spec-
ified instants, more often than not concurrently with
other events. Such issues, also discussed in (Scherl,
2003), are efficiently handled with the Event Calcu-
lus and DECKT, where the dimension of time is in-
herently modeled within the basic ontology, e.g.,:
Happens(PlaceRFCard(id),t) ⇒
Happens(StartRec(Mic),t) ∧
Happens(StopRec(Mic),t + 5)
Ramifications. Considering the dynamics of a do-
main, an agent can not only derive knowledge from
direct effects of actions, but also indirectly through
appropriate ramifications. In the simplest case, these
can be represented as state constraints of a domain ax-
iomatization and are accommodated by DECKT with
axioms, such as the following:
HoldsAt(Knows(Holding(user, object)),t) ∧
HoldsAt(Knows(InRoom(user,room)),t) ⇒
HoldsAt(Knows(InRoom(ob ject, room)),t)
Reasoning about only Knowing. Deliberating
about what an agent does not know, in the style of
(Lakemeyer and Levesque, 1998), is an important as-
pect when modeling partially known environments.
It enables the representation of subtle differences in
the meaning of propositions, distinguishing, for in-
stance, between the knowledge that some microphone
is currently recording, i.e., HoldsAt(Knows(∃mic
Rec(mic)),t), without explicitly knowing which, i.e.,
¬∃mic HoldsAt(Knows(Rec(mic)),t).
4.2 Hidden Causal Dependencies
In addition to being able to cope with a multitude
of diverse commonsense phenomena, an epistemic
theory implementing an agent’s cognitive skills in
AmI needs to support long lived autonomous oper-
ation; agents may need to execute long action se-
quences under partial information about the envi-
ronment, whereas access to required world aspects
through sensing may be limited or not available when
needed. DECKT enables an agent to generate and
maintain long chains of dependencies among un-
known fluents by managing HCDs. These dependen-
cies, handled as ordinary fluents, minimize computa-
tional complexity and at the same time facilitate valu-
able ramifications when seeking for knowledge about
unobservable fluents.
Example 2. Among the personal assistant’s tasks is
to monitor the user’s everyday activities and provide
instructions or activate alerts when exceptional situ-
ations are detected with an as less intrusive manner
as possible. Let fluent f
1
denote the situation when
the user is cooking, which is derived by fusing rel-
evant contextual information and user activity in the
kitchen. The end of this task can be detected from
a number of activities that follow a pattern, such as
turning off the hot plate, placing dishes in the sink and
opening the tap water. If the user leaves the kitchen
(event e
1
) while cooking, the assistant agent should
identify a potential exceptional behavior (fluent f
2
),
but not disturb the user just yet. Only if the user picks
up the phone (event e
2
) an alert (fluent f
3
) should be
activated, initiating appropriate actions to notify the
user about unfinished kitchen activity. The previous
behavior can be plainly axiomatized as follows:
HoldsAt( f
1
,t) ⇒ Initiates(e
1
, f
2
,t)
HoldsAt( f
2
,t) ⇒ Initiates(e
2
, f
3
,t)
Assume now that at timepoint T the contextual infor-
mation coming from the kitchen is ambiguous, i.e.,
¬HoldsAt(Kw( f
1
),T) and then the user leaves the
kitchen and starts making a phone call. Based on
DECKT, the following HCDs are created for T
′
> T:
|= HoldsAt(Knows( f
1
⇔ f
2
),T
′
)∧
HoldsAt(Knows( f
2
⇔ f
3
),T
′
)
Specifically, the agent does not knowif an alert should
be triggered and, before disturbing the user, this con-
tingency needs to be verified. Although there is no
direct means of sensing f
3
, by evaluating f
1
the agent
can also derive f
3
based on the interrelation of HCDs.
In conjecturing that there is work in progress in the
kitchen with potential hazard (e.g., a turned on appa-
ratus), the act of sensing f
1
is implemented as a check
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
246

procedure of sensitive aspects.
Notice how HCDs are different from domain state
constraints. Rather than being necessarily true at all
times, the dependencies they represent are temporary,
created or destroyed based only on the agent’s current
KB. Possible worlds-based epistemic theories, which
maintain all alternative worlds rather than HCDs, are
less suitable in practice, as they require consider-
able storage and computational resources (Petrick and
Levesque, 2002). Alternative approaches that do not
deal explicitly with the notions of causality, such as
rule-based approaches, apart from being restricted to
less expressive commonsense phenomena, require for
the designer to model beforehand all possible condi-
tions that call for some action to be performed.
5 IMPLEMENTATION
The AmI infrastructure that is being implemented
at FORTH institute expands in a three-room set up,
where a multitude of hardware and software services
have been developed, such as 3D person localization,
speech recognition etc. The middleware responsible
for creating, connecting and consuming the services is
CORBA-based. The rule-based component of the rea-
soner module uses Jess
2
as its reasoning engine that
deploys the efficient Rete algorithm for rule match-
ing, while the Validator component uses both Jess
and DEC Reasoner
3
, a SAT-based Event Calculus rea-
soner. All available knowledge is encoded in OWL
using the Prot´eg´e platform for editing and querying
the corresponding models.
As far as the DECKT epistemic axiomatization
is concerned, we are currently constructing an Event
Calculus reasoner on top of Jess, that can support,
among others, two important features: (a) it enables
reasoning to progress incrementally to allow for run-
time execution of knowledge-based programs (online
reasoning) and (b) it permits nested reification of epis-
temic fluents in predicates, to allow epistemic propo-
sitions, such as Knows(Open(S1)), to be treated as
terms of a first-order logic rather than atoms.
Predicates are asserted as facts in the reasoner’s
agenda, specified by the template definition:
(deftemplate EC (slot predicate)
(slot event (default nil))
(slot epistemic (default no))
(multislot posLtrs )
(multislot negLtrs )
(slot time (default 0)))
2
Jess, http://www.jessrules.com/
3
DECReasoner, http://decreasoner.sourceforge.net/
Multislots represent lists denoting disjunction of
fluents (conjunctions are decomposable into their
components according to the definition for knowl-
edge), so that for instance knowledge about formula
(f
1
∨ f
2
∨ ¬ f
3
) at time 1 to be captured by the fact:
(EC (predicate HoldsAt)
(epistemic Knows)
(posLtrs f_1 f_2)
(negLtrs f_3)
(time 1))
Treating positive and negative literals of formulae
with lists enables us to represent and dynamically ma-
nipulate HCDs according to DECKT axioms
4
.
6 CONCLUSIONS
In this paper we described different aspects of re-
search in AmI to which reasoning under partial
knowledge can contribute, providing also examples
from an implemented system that couples rule- and
causality-based techniques. The presented applica-
tion of an epistemic action theory is an enabling di-
rection for the realization of the AmI vision. Our cur-
rent emphasis is on evaluating the solution on differ-
ent scenarios, as well as on investigating even more
challenging aspects, such as distributed knowledge.
ACKNOWLEDGEMENTS
This work has been supported by the FORTH-ICS
internal RTD Programme ”Ambient Intelligence and
Smart Environments”.
REFERENCES
Bettini, C., Brdiczka, O., Henricksen, K., Indulska, J.,
Nicklas, D., Ranganathan, A., and Riboni, D. (2009).
A Survey of Context Modelling and Reasoning Tech-
niques. Pervasive and Mobile Computing.
Bulfoni, A., Coppola, P., Della Mea, V., Di Gaspero, L.,
Mischis, D., Mizzaro, S., Scagnetto, I., and Vassena,
L. (2008). AI on the Move: Exploiting AI Techniques
for Context Inference on Mobile Devices. In 18th Eu-
ropean Conference on AI, pages 668–672.
Grammenos, D., Zabulis, X., Argyros, A., and Stephani-
dis, C. (2009). FORTH-ICS Internal RTD Programme
Ambient Intelligence and Smart Environments. In
AMI’09: Proceedings of the 3rd European Conference
on Ambient Intelligence .
4
The Jess-based Event Calculus reasoner and examples
are available at http://www.csd.uoc.gr/˜patkos/deckt.htm.
EPISTEMIC REASONING FOR AMBIENT INTELLIGENCE
247

Kowalski, R. and Sergot, M. (1986). A Logic-based Calcu-
lus of Events. New Generation Computing, 4(1):67–
95.
Lakemeyer, G. and Levesque, H. J. (1998). AOL: A Logic
of Acting, Sensing, Knowing, and Only Knowing. In
Principles of Knowledge Representation and Reason-
ing, pages 316–329.
Mueller, E. (2006). Commonsense Reasoning. Morgan
Kaufmann, 1st edition.
Patkos, T. and Plexousakis, D. (2009). Reasoning with
Knowledge, Action and Time in Dynamic and Uncer-
tain Domains. In IJCAI’09, pages 885–890.
Petrick, R. P. A. and Levesque, H. J. (2002). Knowledge
Equivalence in Combined Action Theories. In KR’02:
International Conference on Principles of Knowledge
Representation and Reasoning, pages 303–314.
Scherl, R. (2003). Reasoning about the Interaction of
Knowledge, Time and Concurrent Actions in the Sit-
uation Calculus. In IJCAI’03, pages 1091–1098.
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
248
