
ANALYSIS OF ELECTRICAL GENERATOR FOR POWER
HARVESTING FROM HUMAN MOVEMENTS
V. Luciano, E. Sardini, M. Serpelloni
Department of Information Engineering, University of Brescia, Brescia, Italy
G. Baronio
Department of Mechanical Engineering, University of Brescia, Brescia, Italy
Keywords: Eletromechanical generator, Human energy harvesting, Biomedical devices.
Abstract: In this paper various architectures of electromagnetic harvesting devices, realized in the Department of
Information Engineering of the University of Brescia, is reported, estimating their usability for biomedical
applications. Furthermore, this paper shows a first attempt of a new electromagnetic generator architecture.
The proposed system is modelled and simulated showing promising results.
1 INTRODUCTION
Power harvesting modules are a viable solution to
the problem of supplying autonomous systems
reducing the problem of battery disposal and
replacement. They can also improve the
performances of wireless devices. The reduction of
power consumption of electronic devices has made
possible to supply them through the harvesting and
subsequent conversion of energy that is present in
different forms in the environment.
An interesting field where the energy harvesting
could raise the performances of the devices is the
biomedical sector. In this paper, we will show
various architectures of electromagnetic harvesting
devices proposed in literature, estimating their
usability for biomedical applications. Afterwards we
will describe a first attempt of the research group
with a nonlinear resonator which has been designed
and tested. Lastly we will hint at two promising
architectures that have been conceive in the research
group and that will be objective of future works.
There are different sources of energy usable for the
electrical conversion. Mechanical energy from
vibrations is the most common and usable energy
source available in the human environment.
Numerous issues must be taken into consideration
for a proper design of a device which harvests
energy by vibrations, the most significant concerns
the low frequencies of mechanical vibrations.
Using a linear approach, the geometric dimensions
of the resonating elements are a problem in order to
reduce the resonance frequency. In fact reducing a
device on a mill metric scale, or smaller, limits the
resonance frequency: using ordinary material, a
small dimension entails a great resonance frequency
and a small mass (the first natural frequency of a
vibrating system can be express, qualitatively,
by
⁄
). A possible solution could be the
introduction of nonlinearity in the system
introducing behaviours not intuitively predictable
and potentially exploitable for the proposed purpose.
An example is to use a material with nonlinear
elastic strain for the elastic suspension of the
swinging mass. This solution has been analyzed by
the research group and in the next section we will
show the preliminary numerical and experimental
results based on the existent prototype reported in
Sardini and Serpelloni (2010).
An interesting solution in this direction is the device
proposed by Bowers and Arnold (2009), in which a
spherical unidirectional magnetized permanent
magnet ball moves arbitrarily in a spherical cavity
wrapped with copper coil winds.
Jia and Liu (2009) proposed a liquid metal magneto
hydrodynamics generator; this innovative solution
uses the induction of electric current due to
194
Sardini E., Luciano V., Serpelloni M. and Baronio G..
ANALYSIS OF ELECTRICAL GENERATOR FOR POWER HARVESTING FROM HUMAN MOVEMENTS.
DOI: 10.5220/0003154301940198
In Proceedings of the International Conference on Biomedical Electronics and Devices (BIODEVICES-2011), pages 194-198
ISBN: 978-989-8425-37-9
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

movement of an electricity conductive liquid metal
in a magnetic field. The advantage of this appealing
idea is its flexibility of actuation and controllability,
its high adaptability to harvesting from a
unidirectional movement and its relative high
efficiency (more than 45%) in relation to common
harvesting devices.
Another possible solution that at the moment is
under consideration is the double conversion of the
kinetic energy of the movement, at first in pressure
energy of a fluid and subsequently in the kinetic
energy of a rotational electromechanical generator.
Mitcheson, Green, Yeatman and Holmes (2004)
analysed the different architecture of vibration-
driven micropower generators and their research
conclude that the devices Coulomb Force Parametric
Generator (CFPG) are the preferable solution for the
systems in which the vibration source frequency is
variable and the allowable mass frame displacement
is small compared to the external source of
vibration. This architecture will be showed in the
next section.
In the research group a new device for the
generation of electricity applied to an electronic
instrumented total knee prosthesis is under
development. This device has been simulated and
the results obtained are in the following reported.
2 ANALYSIS OF PROPOSED
DEVICES
The research group is interested to insert within a
knee prosthesis an autonomous system to measure
the resultant forces existing in the joint.
These data are very important because a proper
value of forces is fundamental to assure a correct
functionality of the limb and the deambulation, in
addition it permits to estimate the distribution of the
contact forces on the medial and lateral polyethylene
component surfaces and consequently its life (Blunn
et al. (1991), Currier et al. (2005), D’Lima et al.
(2006, 2007)).
The goal is to integrate in a single device both
the sensors and electronic circuits with a power
harvesting supply system and a wireless data
transmission. An external reading unit close to the
knee (about few meters) receives the data and allows
their analysis also by remote control.
Crescini, Sardini and Serpelloni (2009)
realized a
first attempt of an autonomous sensor executes
autonomously force measurements into a protected
environment and wireless transmits data directly
from the inside of the implant to an external readout
unit. The forces transmitted across the knee joint
during normal human activities such as walking,
running or climbing can be directly measured.
Batteries are completely eliminated by harvesting
energy from an externally applied magnetic field
collected by a miniature coil within the implant.
The remote powering harvesting system provides
also for the signals transmission by the same
electromagnetic coupling, at 125 kHz, through the
coil antenna of the transponder interface.
This solution obliges the patient to put this
external coil and to have that on the knee during the
measure of the forces. In order to remove this
complication in the normal activity of the patient,
the research group, after having tested the correct
operational requirements of the system, has been
addressing itself to the evaluation of a new solution
completely integrated in the prosthesis for the
generation of the power supply.
The energy harvesting by inertial
electromagnetic generator, that scavenges the kinetic
energy of the human movement, has been the new
objective.
An electromagnetic inertial generator is a device that
converts the mechanical energy of a mass swinging
in a magnetic field in electrical energy, through
Faraday-Newmann-Lenz law.
The mechanical energy in the human body is almost
totally in kinetic form and generated by the
movement of the limbs, consequently it is
characterized by low frequencies and it is generally
discontinuous. This situation doesn’t allow an
efficient exploitation of energy and the generator’s
design is fundamental to obtain a sufficient power
for the electricity supply of the devices.
The most common architectures of electromagnetic
inertial generator can be described by a linear
second order differential model:
(
)
+
(
)
+
(
)
=() (1)
where is the mass that swings, () is its
generalized displacement (the motion can be
rotational or translational),
(
)
and
(
)
are
respectively the viscous damping force and the
linear restoring force acting on the mass, and () is
the active force due to an external imposed
actuation. Generally the driving force () has
transmitted by device’s casing upon a mass
conveniently designed, a restoring force allows a
cyclic movement, a braking force cross the motion
while the magnetic field has produced by a
permanent magnet that, generally, is the swinging
mass. Mitcheson et al. (2004) showed that
ANALYSIS OF ELECTRICAL GENERATOR FOR POWER HARVESTING FROM HUMAN MOVEMENTS
195
substantially these devices can be reduced in three
categories. Depending on kind of resistant and
restoring force the analytical model is named:
Viscous Damping Resonant Generators (VDRGs),
Coulomb Damping Resonant Generators (CDRGs),
and Coulomb Force Parametric Generators (CFPGs).
Next we show different possible solutions in order to
reduce the resonance frequency and in particular we
examine the characteristics of the VDRGs and
CFPGs architectures.
As for the VDRGs, the first solution proposed by
Sardini and Serpelloni (2010) has been studied for
the electrical energy supply of an autonomous sensor
implanted in a human knee, consisting of completely
embedded structures with no physical links to the
outside world. The primary aim has been reducing
the resonance frequency. The operating principle is
based on the relative movement of a planar inductor
with respect to permanent magnets. A mathematical
model has been formulated assuming the
electromechanical generator as a spring-mass-
damper system with a base excitation.
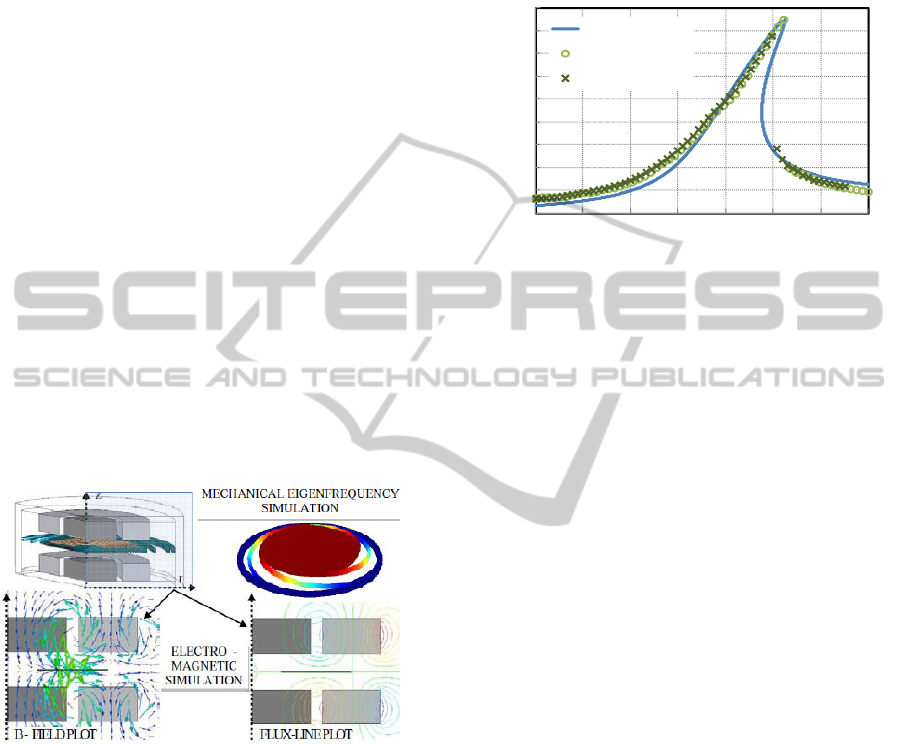
A specific configuration of magnets is proposed
and analyzed by FEM simulations (Figure 1) with
the aim to improve the conversion efficiency,
increasing the spatial
variation of magnetic flux.
Figure 1: Simulation plots in mechanical eigenfrequency
and electromagnetic domains. Reported in Sardini and
Serpelloni (2010).
The system has been tested and experimental
measurements showed a typical maximum power of
about 16 mW at 30 Hz with a “LATEX” material for
the membrane. In order to improve the characteristic
of the device, over all in the direction of a reduction
of natural frequency, the material has been chosen
with non linear elastic characteristic. In this case the
mathematical model is different from the one used in
equation (1). The restoring force is nonlinear by
adding a cubic term, and damping is proportional to
the speed with an electrical and mechanical
component.
The working frequencies of the generators has been
simulated and their values are congruent with the
experimental results in a range of possible
frequencies included between 25Hz and 40Hz, how
the Figure 2 shows.
Figure 2: Comparison between simulation results and
experimental data. Reported in Sardini and Serpelloni
(2010).
The polymeric materials allowed the lowering of the
resonant frequency compared to linear generators,
but the presence of a resonant behaviour entails the
maximum efficiency for a given frequency of
excitation which depends on design of generator
(geometry, material, reaction forces). This aspect
reduces the scope of employment of a device to
upper frequencies, because not simple practical
problems emerge for the obtaining of a resonant
frequency in the band of frequencies of the source.
In fact, in this case, it needs to obtain a small
resonant frequency without to increase the
dimensions of the device.
It is evident that a similar resonant generator will not
be adequately able to satisfy the requirements of
biomedical employments.
The first comment is a theoretical consideration
relating to different electromechanical generators
that don’t work in a resonant manner.
A CFP generator is one of these ones; its model
is showed in Figure 3: a swinging magnetic mass
is free to move in a propped case with an external
coil in which the prevalent dissipative forces are of a
Coulomb kind (e.g. taking a vacuum sealed case and
using lapped contact surfaces).
Mitcheson et al. (2004), concluded that CFPGs have
better performance when the ratio
<0,1
⁄
,
where
is the maximum amplitude of the mass in
the frame and
is the maximum amplitude of
absolute movement of the frame how Figure 3
shows: it is typical of the case of human body
motion in which
≈5≪
.
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
30 32 34 36 38 40 42 44
AMPLITUDE [Vrms]
FREQUENCY [Hz]
Simulation
Increasing Freq.
Decreasing Freq.
BIODEVICES 2011 - International Conference on Biomedical Electronics and Devices
196
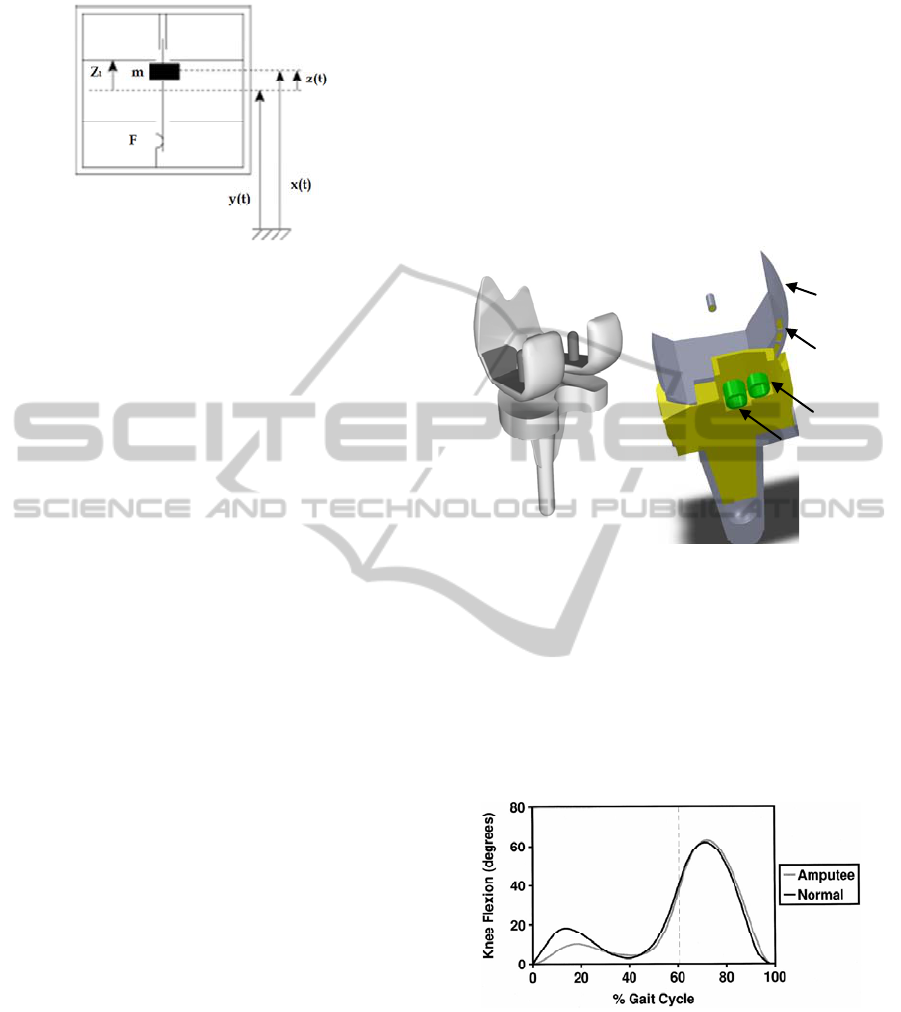
Figure 3: Model of Coulomb Force Parametric Generators.
It is interesting to notice that the elastic suspension
doesn’t exist and the friction force makes
impossible the relative motion () until an adequate
acceleration produce on the mass a force greater
than the friction force itself, so the CFPG device is
not related to the frequency of exciting source: the
magnet moves only when the acceleration exceeds a
predetermined value, with the only constraint that
the movement will be limited by the maximum
amplitude
allowed by the size of the device.
In this direction the solution proposed by Bowers
and Arnold (2009) allows an optimal harnessing of
the kinetic energy because the absolute movement of
the case is completely converted in the relative
movement of the swinging magnet. Indeed this
harvester allows to have a power density up to 0,5
mW/cm
3
, further it is characterised by a simple
conception that allows a possible industrialization.
The limits are connected with the noisiness, a great
parameter of merit for a biomedical application, and
with the effects produced by the reduction of the
dimensions because of the increase of frictional
forces.
The interesting solution designed by Jia, Liu and
Zhou (2009) allows to obtain an efficient and non-
resonant device capable of harvesting the kinetic
energy with an efficiency up to 45% depending on
the velocity of the flow in the duct.
The problem compared to solution proposed by
Bowers and Arnold (2009) is represented by the
difficulties with the volume necessary both for the
hydraulic and magnetic circuit, further the
architecture is complicated by the necessity of a
hydraulic check-valve in order to obtain an
unidirectional flow. On the other hand a good
characteristic of this solution is the generation of a
constant external voltage in a wide range of load
resistance. The last two illustrated devices are been
considered based on interesting and promising
solutions in order to reduce the problem of resonant
devices, and the purpose of the research group will
be to plane two new device with a CFPG
architecture or new possible hydraulic solutions.
At the moment the new proposed solution consists in
an electromagnetic generator in which the coils have
been inserted in a prominent element of tibial
prosthetic plate that is placed between the two
condyle, while the magnets are placed into the
condyles on the opposite surfaces. The electronic
circuits and the force sensors are placed internally
the tibial plate. A model of the device is in Figure 4.
Figure 4: Total knee prosthesis and its cross section with
electromagnetic generator.
In Figure 5 the results of Powers, Rao and Perry
(1998) show that the sagittal knee motion in normal
persons is much the same as in person with trans-
tibial amputations (TTA). In the Figure 5 by the
magnitude of the sagittal knee angle (about 60
degrees) and considering the normal time of swing,
we obtain a mean angular velocity of 2,91 rad/s.
Figure 5: Mean knee motion curve for the trans-tibial
amputee and normal persons; the vertical dotted line
separate stance and swing phases of the gait cycle.
Reported in Powers, Rao and Perry (1998).
In order to check qualitatively the validity of these
solution a first numerical simulation has been
realized, considering the geometry reported in
Figure 4.
magnet
short
coil
condyle
long
coil
ANALYSIS OF ELECTRICAL GENERATOR FOR POWER HARVESTING FROM HUMAN MOVEMENTS
197
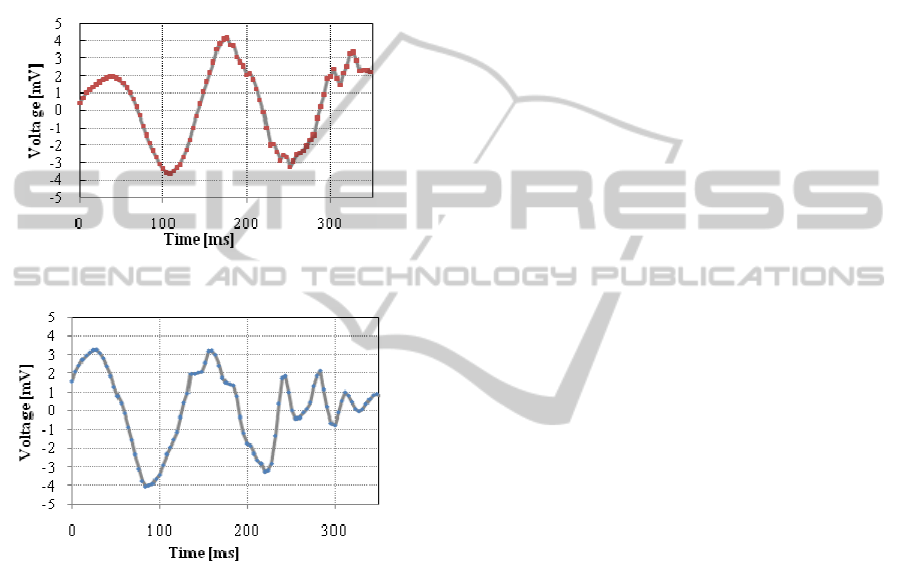
The simulation has been realized hypothesizing that
running of the device is in the swing phase of the
walking cycle of persons with trans-tibial
amputations (TTA). The results in Figure 7 and 8
show the induced voltage in the short and long coils
showed in Figure 4.
Inside each coil a magnetic core has been inserted,
and the coils have not been connected in order to
evaluate individually on each of them the effects of
the magnets.
Figure 7: Induced voltage in short coil.
Figure 8: Induced voltage in long coil.
4 CONCLUSIONS
Two devices have been shown.
The first works in a resonant manner and it is in an
advanced stage of the project. The second is still
object of a series of judgments, in particular the
future works will seek to improve the coupling
effects between the elements of the magnetical
circuits in order to increase the induced voltage.
The goal is to obtain an optimal disposal of the
relative position of the magnets and the coils in
order to increase the magnetic flux through the coils.
REFERENCES
Sardini E., Serpelloni M., (2010), Nonlinear
Electromagnetic Generators with Polymeric Materials
for Power Harvesting from Vibrations. Procedia
Engineering, Eurosensors XXIV.
Bowers, B., J., Arnold, D., P., (2009). Spherical, rolling
magnet generators for passive energy harvesting from
human motion. Journal of Micromechanics and
Microengineering, 19, 9, 094008, 7 pp. IOP
Publishing.
Jia, D., Liu, J., Zhou, Y., (2009). Harvesting human
kinematical energy based on liquid metal
magnetohydrodynamics. Physics letters A, 373 1305-
1309. Elsevier.
Mitcheson, P., D., Green, T. C., Yeatman, E., M., Holmes,
A., S., (2004). Architecture for vibration-driven
micropower generators. Journal of
microelectromechanical systems, 13, 429-440.
Blunn G., W., Walker P., S., Joshi A., Hardinge K.,
(1991). The dominance of cyclic sliding in producing
wear in total knee replacements. Clinical
Orthopaedics and Related Research, 273, 253–260.
Currier, J., H., Bill, M., A., Mayor, M., B., (2005).
Analysis of wear asymmetry in a series of 94 retrieved
polyethylene tibial bearings. Journal of Biomechanics
38, 367–375. Elsevier.
D’Lima, D., D., Patil S., Steklov N., Slamin, J. E.,
Colwell, C., W., Jr., (2006). Tibial forces measured in
vivo after total knee arthroplasty. The Journal of
Arthroplasty, 21, 2, 255–262.
D’Lima, D., D., Patil S., Steklov N., Chien S., Colwell, C.,
W., Jr., (2007). Invivo knee moments and shear after
total knee arthroplasty. Journal of Biomechanics, 40,
S11–S17.
Crescini D., Sardini E., Serpelloni M., (2009). An
Autonomous Sensor for Force Measurements in
Human Knee Implants. Procedia Chemistry, 1, 718–
721. Elsevier.
Powers, C., M., Rao, S., Perry J., (1998). Knee kinetics in
trans-tibial amputee gait. Gait and Posture, 8, 1-7.
Elsevier.
BIODEVICES 2011 - International Conference on Biomedical Electronics and Devices
198
