
COMPLEXITY REDUCTION IN CONTROL OF HUMAN HAND
PROSTHESIS FOR A LIMITED SET OF GESTURES
Giovanni Saggio, Pietro Cavallo, Daniele Casali and Giovanni Costantini
Department of Electronic Engineering, University of Rome “Tor Vergata”, Rome, Italy
Keywords: Hand prosthesis, Data glove, HMI.
Abstract: This paper carried out a statistical analysis of human finger’s joint angles during hand specific daily
activities, studying the correlations among the joints and applying a linear regression to express their
correlations. The aim was to reduce the number of myoelectric sensors necessary in devices such as
prosthesis, stands the current surgery difficulties and the problem of rejection, but without losing too many
degrees of freedom. Measures were taken using our special hand movement acquisition system called
HITEG data glove. As a preliminary work, we decided to limit the set of gestures performed to 9 of the
most common movements of the human hand. The results shown that the number of sensors can be reduced
from 14 to 7 with an acceptable error on the presumed value of each finger joint angle which can be as low
as 10 degrees.
1 INTRODUCTION
Myoelectric prosthetic hands are used to replace
functions of a natural hand lost by amputation.
Motor functions of such myoelectric hands can
almost be compared to that of a natural hand
(Shadow Robot Company, 2003). They have a very
high number of joints and actuators, which bring up
to 20 Degrees of Freedom (DoF). Unfortunately this
technology cannot be fully exploited by current hand
prosthesis (Carrozza et al., 2003 - Micera et al., 2002
- Craelius et al., 1999). The main limitation regards
the sensor system that allows to control the robotic
hand: a set of myoelectric sensors is placed above
the attachment of the prosthesis to the arm: every
joint with an own DoF of the hand needs a specific
myoelectric sensor, but placing 20 different
myoelectric sensors is not only practically difficult:
it also increments the possibility of a rejection.
Hence only few myoelectric sensors can be
reasonable used, and this affects the DoF available
to perform a gesture.
The purpose of this work is to study the
correlations among joint angles while performing
most common and useful movements of the hand. If
we discover that an articulation is strongly correlated
to another one then we can express the former in
function of the latter, reducing the necessary number
of myoelectric sensors but still maintaining our
purposes.
To measure the joint angles we used our hand
movement acquisition system developed by the
Health Involved Technical Engineering Group
(HITEG), at the University “Tor Vergata” (Saggio et
al., 2009). We limited the choice of gestures and
movements we believe to be the most useful for an
impaired person. We took the couple of joints that
showed the best correlation and we calculated, by
means of linear regression, the best approximation
that allow to infer the position of a joint with respect
to another one. It’s important to stress that
considering different sets of movements can lead to
different results (Vinjamuri et al., 2010).
2 THE DATA GLOVE
For our experiment we adopted the so called
HITEG-Glove as previous reported (Saggio et al.,
2009) and shown in Fig. 1. It is constituted by 18
sensors, placed according to Fig. 2. This data glove
has three sensors for each finger (3-14): one for
measuring the Metacarpo Phalangeal (MCP) angle,
one for the Proximal Interphalangeal (PIP) angle and
one for the Distal Interpahlangeal (DIP) angle, while
thumb is measured by only two sensors (1-2). There
242
Saggio G., Cavallo P., Casali D. and Costantini G..
COMPLEXITY REDUCTION IN CONTROL OF HUMAN HAND PROSTHESIS FOR A LIMITED SET OF GESTURES.
DOI: 10.5220/0003156902420247
In Proceedings of the International Conference on Health Informatics (HEALTHINF-2011), pages 242-247
ISBN: 978-989-8425-34-8
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

are also other four sensors to measure the angle
between the fingers (15-18). With the overall
acquisition system, the expected error in measuring
each finger joint position is as low as 4 degree.
Figure 1: HITEG Glove.
3 SET OF POSTURES
To perform a consistent reduction of the complexity
of the system we chosen a limited set of movements.
This choice strongly affects the correlations that will
be found in our analysis, and so it is very important
to make a good selection among the most common
and useful gestures. Missing some important
movements could lead to spurious correlations while
choosing useless movements that have no practical
utilization could unintentionally prevent some
possible reductions.
Figure 2: Position of the sensors over the hand
articulations.
Keeping in mind this concept and considering
that all transitions from a position to the next one are
recorded and included in the analyzed dataset, we
selected the positions discussed in the following
paragraphs and shown in figure 3. Note that we
excluded positions implying third and fourth finger
moving independently: these positions are
notoriously uncomfortable, usually avoided also by
healthy people, and have no real practical utility.
This exclusion will bring an obvious correlation
between last two fingers: if we want to give the
Figure 3: Hand positions from A to I.
COMPLEXITY REDUCTION IN CONTROL OF HUMAN HAND PROSTHESIS FOR A LIMITED SET OF
GESTURES
243

possibility to control separately these two fingers we
just have to discard this correlation, which in our
experiment is expressed by the couple 9-12: we will
just need eight sensors in spite of seven.
Data acquisitions were performed measuring the
nine basic movements described in the following,
repeated 10 times by 5 different healthy persons 25-
40 aged.
3.1 Position A: Open Hand
The open hand position is a fundamental position,
useful in different occasions and can be a transition
posture from one gesture to another.
3.2 Position B: Fist
Closing completely the hand in the fist posture, all
the fingers and the thumb are almost in the
maximum bent position. It is adopted, for example,
any time we want to keep something small in our
hand.
3.3 Position C: Index Finger Up
The index finger up position is the main gesture of
the hand: it is used every time we want to point
somewhere or somebody, or to press a button.
3.4 Position D: Index and Middle
Finger Up with Thumb Closed
This fourth position, with the index and middle
finger up with the other fingers bent.
3.5 Position E: Index and Middle
Finger Up with Thumb Open
In this posture the thumb and the first two fingers
are completely outstretched while the others are
bent.
3.6 Position F: Hand Open, with
Thumb Closed
This position represents the motion of thumb
independently, while all fingers remain outstretched.
3.7 Position G: OK Sign
This posture represents the gesture that we do, as an
example, to collect something with thumb and index
finger, maintaining the others opened. It differs from
the position used to hold a pen because the DIP of
the index in this gesture is bent.
3.8 Position H: Grabbing an object
This position is what we do to grab and hold an
object.
3.9 Position I: Holding a Pen
When holding a pen the DIP of the finger does not
bend while the thumb is almost closed and the other
fingers are relaxed.
4 STUDY OF CORRELATION
We asked every subject to repeat all the A-I postures
in sequence 10 times, so obtaining a corresponding
dataset of 450 x 14 sensors. For every couple of the
14 finger joint angles, we measured the Pearson
product-moment correlation coefficient, which is
expressed by the following formula:
,
=
,
(1)
where cov(X,Y) is the covariance of the two random
variables X,Y that we are comparing, and
σ
is the
standard deviation.
In table I we reported all the correlation
coefficients. Numbers indicate the joints as shown in
Fig 2.
It’s important to notice that if our aim is limited
to a specific application, the number of correlations
would be surely higher and the complexity achieved
lower. For example if we want to develop a
prosthesis capable just to grab and release objects
we could relate every DIP and PIP to their respective
MCP (e.g. angles 5 and 4 represented by angle 3).
An observation that we can do is that all joints
from last two fingers are very highly correlated: this
is clearly due to the fact that last two fingers always
move together, in particular MCP, PIP and DIP of
third finger (9, 10, 11) are correlated respectively
with MCP, PIP and DIP of fourth finger (12, 13, 14).
Moreover, different articulations of the same
finger are almost correlated: MCP is correlated with
PIP. this is valid for the first finger (0.990), third
finger (0.955) and fourth finger (0.986), but
correlation seems less strong in second finger
(0.832). Also PIP is correlated with DIP: this is
strongly visible in the second, third and fourth finger
but not in the index. We expected this result because
the DIP of the index can bend (e.g. in position H) or
not (e.g. in position I).
HEALTHINF 2011 - International Conference on Health Informatics
244

Table 1: Correlation coefficient for every couple of joint angles.
1 2 3 4 5 6 7 8 9 10 11 12 13 14
1 1
2 .649 1
3 .377 .672 1
4 .357 .644 .990 1
5 .429 .470 .889 .851 1
6 .074 .167 .605 .625 .571 1
7 .103 .225 .604 .623 .526 .832 1
8 .018 .293 .697 .703 .650 .862 .983 1
9 .088 .110 .319 .341 .362 .770 .546 .519 1
10 .166 .188 .312 .340 .272 .677 .530 .508 .955 1
11 .112 .310 .519 .546 .440 .754 .695 .698 .889 .957 1
12 .117 .107 .400 .406 .474 .778 .584 .585 .979 .943 .911 1
13 .104 .160 .357 .372 .400 .758 .591 .579 .987 .973 .933 .986 1
14 .022 .259 .451 .456 .505 .728 .638 .660 .928 .941 .952 .956 .973 1
A visual representation of the correlation can be
seen in Fig. 4-6, where the horizontal position of
every point represents the value of the first angle
considered (from 0° to 90°) and the vertical position
represents the value of the second angle. Each
reported point is placed in the degree Cartesian
diagram, representing the reciprocal position of one
joint with respect to another for each posture.
Fig. 4 represents a case of no correlation: angle 2
vs. 11 (DIP of the thumb vs. DIP of third finger).
Fig. 5 represents a case of high correlation (MCP vs.
PIP of fourth finger). Fig. 6 represents a case where
there is a little correlation (0.605) but not enough to
justify a reduction.
Figure 4: DIP of thumb versus DIP of third finger (2-11).
It’s important to notice that if our aim is limited
to a specific application, the number of correlations
would be surely higher and the complexity achieved
lower. For example if we want to develop a
prosthesis capable just to grab and release objects
we could relate every DIP and PIP to their respective
MCP (e.g. angles 5 and 4 represented by angle 3).
All joints from last two fingers are very highly
correlated: this is clearly due to the fact that last two
fingers always move together, in particular MCP,
PIP and DIP of third finger (9, 10, 11) are correlated
respectively with MCP, PIP and DIP of fourth finger
(12, 13, 14).
Figure 5: MCP vs. PIP of fourth finger (12-13).
Moreover, different articulations of the same
finger are almost correlated: MCP is correlated with
PIP. this is valid for the first finger (0.990), third
finger (0.955) and fourth finger (0.986), but
correlation seems less strong in second finger
(0.832). Also PIP is correlated with DIP: this is
strongly visible in the second, third and fourth finger
but not in the index. We expected this result because
the DIP of the index can bend (e.g. in position H) or
not (e.g. in position I).
COMPLEXITY REDUCTION IN CONTROL OF HUMAN HAND PROSTHESIS FOR A LIMITED SET OF
GESTURES
245
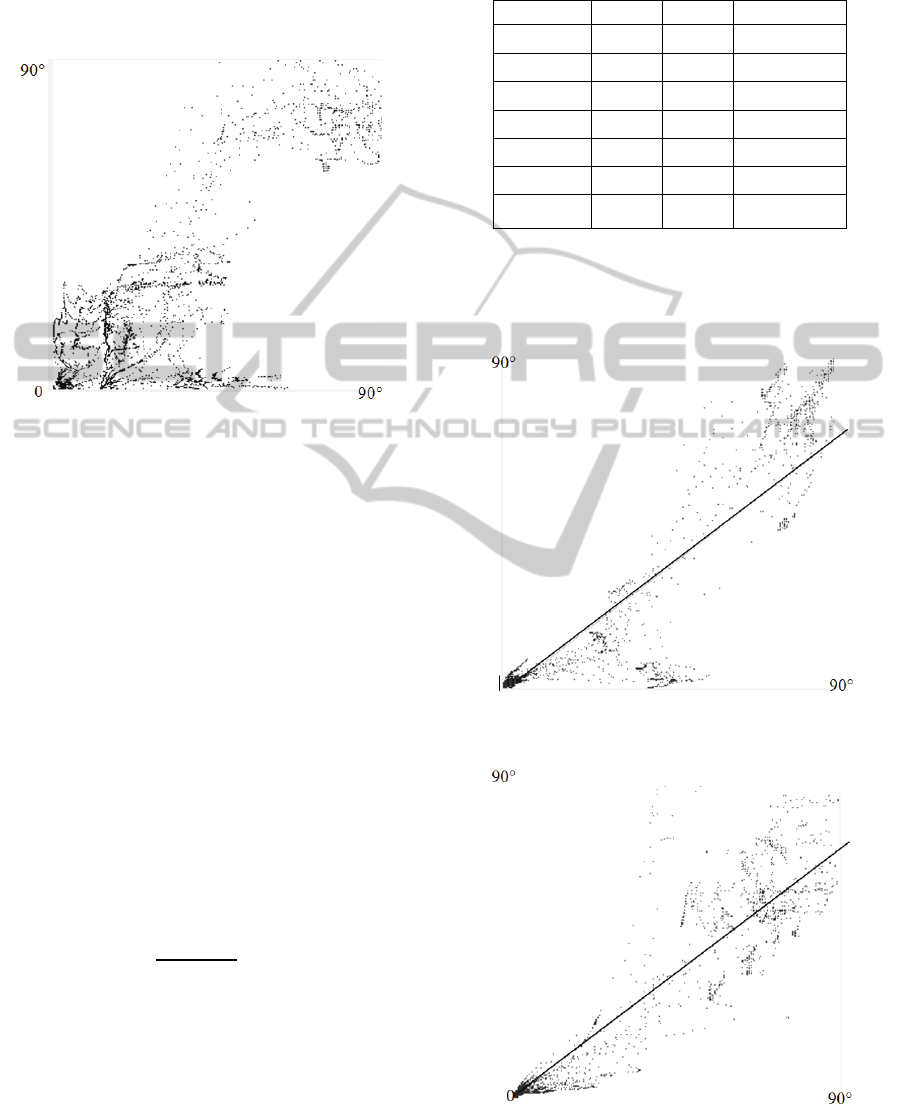
It can be noticed that the distribution in Fig. 5 is
roughly a line with a negative offset. This means
that the joint on the y axis started to move before the
one on the x axis. These kind of relations can be
analyzed in all diagrams to discover interesting and
more precise correlations among the joints.
Figure 6: MCP if first finger vs. MCP of second finger (3-
6).
5 REDUCTIONS
Basing on the study of the correlation on the
previous section, we identified seven couple of
variables that could be considered related, hence we
could express one in function of the other.
A high correlation means that a graph like Fig. 5
is very near to be a line, so it can be expressed by
the following equation:
=
++
(2)
where x
i
and y
i
are any of the couples of variables
that we considered for the i-th observation, while a
and b are coefficients that have to be evaluated in
order to have the best fit, finally
ε
is the error.
By means of the linear regression (Fisher R.,
1925), we can minimize the quadratic error, and
obtaining the values for a and b:
=
,
(3)
=
−
(4)
where cov(X,Y) is the covariance between X and Y,
σ
X
2
is the variance of X,
μ
X
is the mean value of X
and
μ
Y
is the mean value of Y. In table II we
reported, for every couple of variables, coefficients a
and b, as well as the mean quadratic error that we
obtain by substituting the real value with the value
extrapolated with our linear function.
Table 2: Linear regression coefficients and mean error.
Joint couple a b mean error [°]
3-4
-0.0016 1.0097 3.12
7-8
-0.0046 1.0353 5.05
10-11
0.0229 0.9041 8.43
13-14
0.019 0.9475 5.23
9-10
0.0605 1.050 9.84
12-14
0.0463 0.9963 7.67
9-12
-0.0074 0.9343 5.41
In Figs 7-8 examples of regression lines are
shown superimposed to the graph for 10-11 and 7-8
joints respectively, using the a and b coefficients in
table II.
Figure 7: PIP vs. DIP third finger (10-11) with regression
line.
Figure 8: MCP if first finger vs. MCP of second finger (3-
6).
HEALTHINF 2011 - International Conference on Health Informatics
246

Referring to Table II, the estimated mean error is
in any case lower than 10°, value that is in any case
comparable to the overall 4° error of the adopted
acquisition system.
6 CONCLUSIONS
In this paper a statistical analysis has been carried
out to discover the correlations among 14 joint
angles in the hand on a restricted set of 9 static
postures, that we took as the most common and
useful. We found out that the values of seven joints
can be computed basing on the values of the
remaining seven, with an error lower than 10
degrees. This can lead to a important reduction of
myoelectric sensors, from 14 to 7, useful for driving
an artificial prostesys. This can be true for the most
part of applications when it is not requested a very
high degree of accuracy or a large number of DOF.
For example robots or drones remote controlled that
need high precision but few DOF could be driven by
a hand wearable device with a small set of sensors.
This research can also improve gesture recognition,
reducing the complexity of the problem and
improving the classification.
Vice versa, this work states a limit in hand
controlled devices: we cannot use all of 14 finger
joints to pilot a device with 14 DOF because some
of the joints are not independent.
Future investigations can be done; In fact it can
be carried out a similar study on the basis of
supposition of non linearity between the finger
joints, or it can be considered the relations among
three or more articulations
REFERENCES
Shadow Robot Company, Design of a Dextrous Hand for
Advanced CLAWAR applications, CLAWAR
Conference 2003 Catania.
Carrozza M. C., Vecchi F., Sebastiani F., Cappiello G.,
Roccella S., Zecca M., Lazzarini R. and Dario P.,
“Experimental analysis of an innovative prosthetic
hand with proprioceptive sensors” Proceedings of the
2003 IEEE International Conference on Robotics &
Automation Taipei, Taiwan, September 14-19, 2003,
pages 2230-2235.
Micera S., Carrozza M. C., Massa B., Lazzarini R., Zecca
M., Dario P., “The development of a novel prosthetic
hand - Ongoing research and preliminary results”,
IEEE/ASME Transactions on Mechatronics - 7: 108 -
114 (2002).
Craelius W., Abboudi R. L., Newby N. A., “Control Of A
Multi-Finger Prosthetic Hand”, ICORR '99:
International Conference on Rehabilitation Robotics,
Page 1 – 255.
Saggio G., Bocchetti S., Pinto C. A., Orengo G., Giannini
F., “A novel application method for wearable bend
sensors”, ISABEL2009, 2nd Intern. Symp. Applied
Sciences in Biomedical and Communication Techn.,
Bratislava, Slovak Republic, November 24-27, 2009.
Saggio G., De Sanctis M., Cianca E., Latessa G., De
Santis F., Giannini F., “Long Term Measurement of
Human Joint Movements for Health Care and
Rehabilitation Purposes”, Wireless Vitae09 - Wireless
Comm., Vehicular Technology, Information Theory
and Aerospace & Electronic Systems Techn., Aalborg
(Denmark), 17-20 May, 2009 – pp. 674-678.
Vinjamuri R., Chang C., Lee H., Sclabassi R. J., Mao Z.,
“Dimensionality Reduction in Control and
Coordination of the Human Hand”, IEEE transactions
on biomedical engineering, vol. 57, no. 2, february
2010.
Fisher R., “Statistical Methods for Research Workers “,
1925.
COMPLEXITY REDUCTION IN CONTROL OF HUMAN HAND PROSTHESIS FOR A LIMITED SET OF
GESTURES
247
