
A GAME PLAYING ROBOT THAT CAN LEARN A TACTICAL
KNOWLEDGE THROUGH INTERACTING WITH A HUMAN
Raafat Mahmoud, Atsushi Ueno and Shoji Tatsumi
Department of Physical Electronics & Informatics, Osaka City University, Osaka 558-8585, Japan
Keywords: Humanoid robot, Game strategy, Learning from observation, Structured interview, Long-term memory,
Sensory memory, Working memory.
Abstract: We propose a new approach for teaching a humanoid-robot a task online without pre-set data provided in
advance. In our approach, human acts as a collaborator and also as a teacher. The proposed approach
enables the humanoid-robot to learn a task through multi-component interactive architecture. The
components are designed with the respect to human methodology for learning a task through empirical
interactions. For efficient performance, the components are isolated within one single API. Our approach
can be divided into five main roles: perception, representation, state/knowledge-up-dating, decision making
and expression. A conducted empirical experiment for the proposed approach is to be done by teaching a
Fujitsu’s humanoid-robot "Hoap-3" an X-O game strategy and its results are to be done and explained.
Important component such as observation, structured interview, knowledge integration and decision making
are described for teaching the robot the game strategy while conducting the experiment.
1 INTRODUCTION
Learning from the environment through interaction
is a skill well mastered by human beings. Humans
adopt their learning algorithms according to the task
in which they wish to learn. For example, learning
how to drive cars is different from learning how to
play chess. If we are learning chess through
empirical teaching class, the teacher and the
collaborator is only one person. The learner plays
following naive game theories at the early stages of
learning procedure. In order to improve these naive
theories the collaborator performs an interruption to
the game events through various forms according the
situation. On the other hand, the learner needs to
understand the context of such interrupted situations
in order to update his knowledge, and make use of it
whenever needed. Therefore, the learner starts
expressing his misunderstanding through various
multi-modals interactions. The interaction between
the learner and his teacher improves the learner
understanding level about these situations. In these
cases, the learner’s brain processes these situations
to store certain information about these situations,
which improves the learner’s naive theories of the
game. Theoretically based on many cognitive
researches, human learning is assumed to be
“storage of automated schema in long-term memory
of human brain” (Sweller, J 2006). Schema is
chunks of multiple individual units of memory that
are linked into a system of understanding (
Bransford, J., Brown, A., 2001 ). However, the
learner’s brain performs many processes to the input
data at different places, such as short-term memory
and working memory (Baddeley, A. D 1996). Then a
certain extracted data is stored at its long-term
memory. The short-term memory is assumed as the
place where experiencing any aspect of the world.
Working memory is a place where thinking gets
done. It is actually more brain function than a
location. The working memory is dual coded with a
buffer for storage of verbal/text elements, and a
second buffer for visual/spatial elements (Marois, R.
2005). The main function of Long-term is storing the
learned data as a schema to make use of it when ever
needed, without the need of learning the subject
from the first steps again. The main phases of the
learner’s brain in learning such a task are
observation of the task sequences, interviewing
about what we do not understand, recording the
concluded data from observation and interviewing,
process tracking and making use of the recorded
data to support a hypothetical scenarios for making
decisions. In this paper, we describe an architecture
through which a human teacher teaches a humanoid-
robot "Hoap-3" the game strategy through an
interaction algorithm which humans follow in order
609
Mahmoud R., Ueno A. and Tatsumi S..
A GAME PLAYING ROBOT THAT CAN LEARN A TACTICAL KNOWLEDGE THROUGH INTERACTING WITH A HUMAN.
DOI: 10.5220/0003182406090616
In Proceedings of the 3rd International Conference on Agents and Artificial Intelligence (ICAART-2011), pages 609-616
ISBN: 978-989-8425-40-9
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

to learn a task for the first time. Many other
architectures for teaching a robot by demonstration
were introduced ( Kuniyoshi. Y., M. Inaba. M, and
Inoue. H. 1994)(Voyles. R and Khosla P. 1998).
However such approaches use demonstrations in
order to optimize a predefined goal, and also the
interactive behaviours follow human-machine
(Reeves, B. & Nass, C. 1996) interaction, but does
not follow human-human interaction, which come
out of the strict paradigm that robots are following.
A tutelage and socially guided approach for teaching
the humanoid robot "Leo" a task (Lockerd A.,
Breazeal C. 2004) was proposed, where machine
learning problem is framed into collaborative
dialogue between the human teacher and the robot
learner, however every task has a specific single
goal. In our approach making decisions is based on
accumulative learning that "Hoap-3" gains while
interaction, additionally adaptive selections
behaviour for each new situation in order to achieve
individual goals based on the accumulative learning
information. As an architecture about learning and
interacting in human-robot domain and task learning
through imitation and human-robot interaction
(Nicolescu M. N., Mataric M. J 2001), a behaviour
based (Barry Brian Werger, 2000) interactive
architecture applied to a Pioneer 2-DX mobile robot
is proposed. In these approaches the behaviours are
mainly built from two components, abstract
behaviour and primitive behaviours. However these
two architectures are not suitable and flexible
enough to be applied for teaching a robot various
tasks through interaction. Also this method in
various forms has been applied to robot-learning for
different single-task such as hexapod walking (Maes
P. and brooks R. A. 1990), and box-pushing
(Mahadevan S. and Connell J. 1991). Many other
single task navigation and human-robot instructive
navigation (Lauria S., Bugmann G., 2002) have been
proposed. In our proposed architecture there is no
data provided in advance, and the goals of a task are
being taught while interactions.
Figure 1: The robot interacts with its human teacher.
Moreover, the interactive behaviours are
resembled to those of human’s behaviours while
learning. In this paper, the main features of our
architecture and the developed behaviours are
explained at the following sections. Following this
section, the internal system structure is explained.
Then decision making process is explained. At the
last two sections, testing our architecture and results
from an experiment are explained. This is followed
by discussions about our architecture.
2 OUR ARCHITECTURE
In our approach we use an upper torso of a
humanoid robot "Hoap-3", which has a total 28
degree of freedom (DOFs), 6 flexibility degrees in
each arm, and other 6 flexibility in each leg, 3
flexibility degrees in the head, one degree in the
body (see figure 1).
In order to provide an interactive learning
behaviour, the architecture must be flexible. This
improves the internal processing strategy between
the architecture components, which enables the
robot to recognize and identify its environment
correctly, which in return, improves the efficiency of
mapping between the robot expression components.
This flexible system provides perfect interactive
behaviours in response to its environment changes.
To achieve such an aim, we designate architecture
which composed of multi-components within a
single API root layer (see figure 2).
Our architecture has components requiring
information from the system, such as environment
handling, knowledge updating and expressions, and
other components which provide information to the
system, such as streaming information from the
environment through a vision sensor. In addition, it
has intermediaries components that provide the
necessary information within the system. In our
design we isolated these components from each
other. A proper combination of these components
can perform fair specialized behaviours. The next
subsection will describe and explain such interactive
behaviours.
2.1 Interactive Expressions
The expressions performed by the robot must be
influenced by the task at which the robot is
interacting with, and of-course in addition to the
internal final information that resulted from
processing the task events. However, behaviours
performed by the robot are mainly low level-
behaviours.
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
610
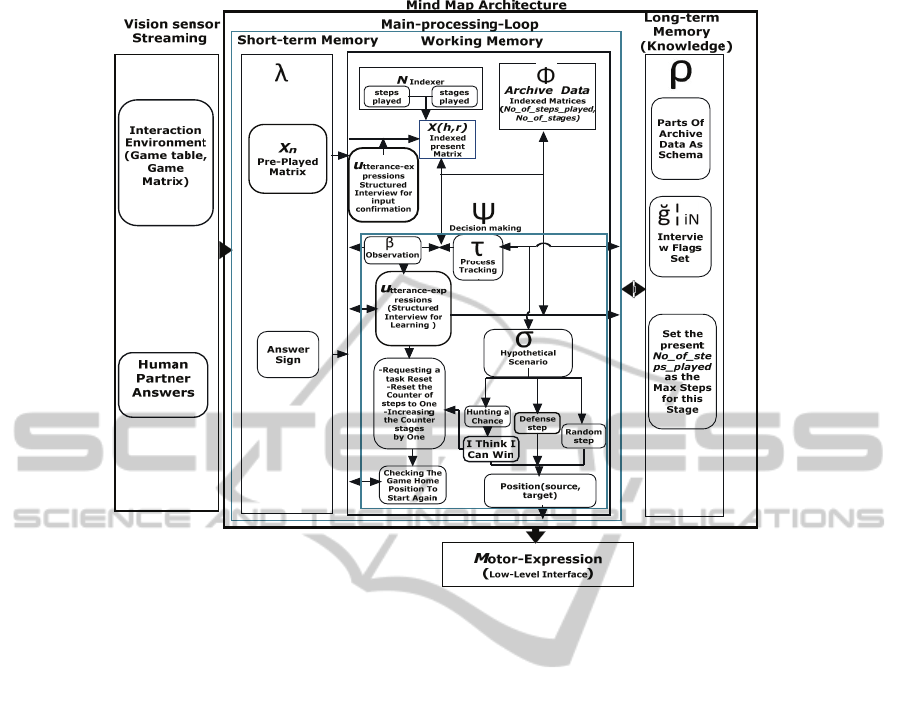
Figure 2: Hoap-3 mind-map.
Main_Loop() // Where the work gets done
{
Do-Processing (): feature detection-
observation,confirmation/representation,
state/knowledge, decision-making.etc.
}
-------------------------
Void Vision_sensor_component
{
While: true
Stream into the main processing loop
}
------------------------
Motor_expression(source, target)
{
While: true
Get-from-main-process-loop (source,
target)
Set trajectory
Perform-low-level-interface
}
Figure 3: Main components of our architecture.
The low-level robotic behaviours mainly include
processing the streamed signals from the sensors,
and performing low level interface to the robot
actuators. A proper combination of such individual
low-level behaviours enables the robot to produce a
higher level behaviour. The robot expression may be
motor-expression Μ or utterance-expressions U.
Μ = { m
1
, m
2
, m
3
, … , m
i
}
U ={ u
1
, u
2
, u
3
,…..…, u
i
}
(1)
Motor-expression is a component that provides the
mapping from high-level commands to low-level
motor commands that are physically realized as
high-level behaviours while executing a task. It
consists of collection of trajectory motor angle
algorithms m
i
at any step of the task in low-level
parameters that provide a task execution to be done.
The utterance-expression is a collection of
individual spoken words u
i
at any step of the task. A
proper combination of the individual words u
i
produces high-level interactive behaviours while
interacting with the robot. In our architecture, since
the other components have the knowledge of
contextual state information, the developer
responsible for utterance-expressions does not need
to worry about this contextual information.
In the approach of learning and playing a game
such as X-O game, the robot must have the
capability of moving an object from one place to
another. The source and the target of an object are
specified by decision-making process. However, a
source of an object at a situation may become a
target at another situation. Therefore, and in order to
avoid the duplicating the software code and inverse
kinematics calculations, a software plug-in is to
?
A GAME PLAYING ROBOT THAT CAN LEARN A TACTICAL KNOWLEDGE THROUGH INTERACTING WITH A
HUMAN
611

override the system and handle such a conflict by
controlling the robot gripper. Mapping and selecting
the motor-expression Μ or utterance-expressions U
are made by the Decision-making (will be explained
later) based on the information stored at the long-
term memory; also the conclusion depends on the
environment events computed by the perception
component. In the next section we will describe the
internal components strategy in processing the
information while teaching the robot a task.
3 SYSTEM ARCHITECTURE
In this section, to show a theoretical instantiation of
the architecture and procedure of interacting with a
robot, X-O game developed between a human
partner and "Hoap-3" is referred. X-O game consists
of 3*3 square board, and six game pieces. Three for
a human partner (h square parts and indexed as 2
while processing) and the other three are for the
robot ( r round parts and indexed as 15 while
processing). Human plays first, and then the robot
plays (see figure 1). Winning is achieved when one
of the players assembles a complete line (row or
column). Human partner should play only one of his
own game pieces at his game turn, and then prompts
the robot to play, and it is the same for the robot. It
only should play one of its game pieces, and then
prompts its human partner to play. We divided the
X-O game into stages, when one of the players wins,
or the robot learns a new idea; a new stage starts
from the home position all over again. While
playing, the robot indexes every step played by the
indexer (see figure 2); and records it as a variable
named no_of_steps_played, also indexes every stage
and records it as a variable named no_of_stage. A
new stage starts if no_of_steps_played is reset to
one. no_of_stage is increased by one while the game
going. In the approach of teaching a humanoid robot
the game strategy, we aim to teach the robot a high
level behaviour performed by a human partner.
The final information from low-level signals of the
vision sensors results in a matrix Χ(h,r) that includes
the number of the human game pieces h, and the
robot game pieces r at every game step as shown in
figure 4.
2 2 2
0 0 0
15 15 15
Figure 4: The final matrix resulted from vision sensors
processing (home position matrix).
While playing, this matrix X is stored as archive data
Φ as in equation (3)(see figure 2).
Φ = {X
(
1
,
1
)
,X
(
2
,
1
)
,
X
(
3
,
1
)
,
…..
,X
N
}, (2)
where N is the index number (no_of_steps_played,
no_of_stage). Another place to store matrix X is the
sensory memory as in human brain, however, in the
sensory memory register λ, we only store a single
piece of data X and replace every game step, as
explained in equation (3).
λ= X
n
(3)
Where X is piece of data that denotes the game
matrix, however n denotes to the index coordinate
(no_of_steps_played - 1, no_of_stage) of the game
step.
At every game step, human teacher performs
action δ. These actions are general actions or have a
specific purpose ğ as equation 4 shows.
δ= { δ│ğ
1
│
N
, δ│ğ
2
│
N
,
δ│ğ
3
│
N
,
…. .
,
δ│ğ
i
│
N
} (4)
The preceding equation δ denotes the action made
by human teacher along task playing and teaching
(general action), and δ│ğ denotes to the actions such
that a specific purpose ğ is achieved at game step N.
In our task we have specific goals, such as teaching
the robot a winning or defence movements
(is_winning or is_defence) for the human teacher or
for the robot (my_wining, my_defence) as explained
in the next equation(5) which denotes that, for every
special action δ a specific purposes ğ
N
at N index.
ğ│
iN
= {is_winning, my_wining , is_defence my_defence}
(5)
3.1 Observation of Human Behaviour
In many proposed approaches (Brian S, Gonzalez J.
2008), templates were provided in advance in order
to assist the system to recognize the context an
action. Also in another proposed approach
(Mahnmoud, R. A., Ueno. A., Tatsumi, S., 2008), a
knowledge data are provided in advance. However,
in our architecture we extract the individual low-
level behaviour context which leads the robot to the
high-level behaviour learning by applying the
following algorithm.
Starting from low-level processing, at which the
robot is able to identify the game pieces coordinates
according the 2-D camera frame and obtain the
game matrix Χ(h,r). This contains the three pieces of
the human teacher h and the other three pieces for
the robot r. The robot should have the ability to
recognize the high-level behaviour performed by
human teacher. To do so, the observation component
in our architecture performs the following processes.
First the human game pieces are replaced with zeros,
which results in a matrix X׀
N- Hoap-3"-Part
that includes
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
612

only the robot game pieces as follows;
X׀
N- Hoap-3"-Part
(h
׀=0
, r)
Then the robot’s game pieces are replaced ones in
which X
becomes a logical matrix X׀
N-"Hoap-3"-Part
,
and includes only the spatial coordinates of robot’s
game pieces at N step as follows;
X׀
N-"Hoap-3"-Part
(h
׀=0
, r
׀ =1
)
On the other hand the same processes are performed
to the same matrix Χ(h,r) but for the teacher’s game
pieces, and produces a logical matrix X׀
N-Teacher-Part
which includes the spatial coordinates of the
teacher’s game pieces at the same N, as follows;
X׀
N-Teacher-Part
(h
׀=1
, r
׀
=0
)
Also the same processes are being performed to the
data λ= X
n
in equation (3) resulting two matrixes,
the first one is logical matrix X
׀n-"Hoap-3"-Part
, includes
only the spatial coordinates of robot’s game pieces
at n step, and another logical matrix X׀
n-Teacher-Part
and includes only the spatial coordinates of teacher’s
game pieces at the same step n as follows;
X׀
n-"Hoap-3"-Part
(h׀
=0
, r ׀
=1
)
and
X׀
n-Teacher-Part
(h׀
=1
, r ׀
=0
)
In order to obtain the context of the low level
behaviour performed to the task is compare the both
the data in X
N
and X
n
in a special manner using Ex-
or logic gate as in the syntax followed in the two
equations (6)(7);
Ð׀
Teacher-Part
= (X׀
N-Teacher-Part
(h׀
=1
, r ׀
=0
) EX-OR
X׀
n-Teacher-Part
(h׀
=1
,r ׀
=0
)) (6)
and
Ð׀
"Hoap-3"-Part
= (X׀
N-"Hoap-3"-Part
(h׀
=0
,r ׀
=1
) EX-OR
X׀
n-"Hoa
p
-3"-Part
(h׀
=0
, r ׀
=1
)) (7)
The resultant data of this procedure is called an
observation data β as shown in equation (8);
β=< Ð׀
Teacher-Part
, Ð׀
"Hoa
p
-3"-Part
> (8)
The resultant information from the observation is
one of three cases directives statuses, status one <
status=No pieces have been moved >, if
β =<0, 0>
Status two indicates <status= the robot game piece
has been moved>, if
β =<0, 1>
And finally status three <status="User-Teacher"
piece has been moved>, if
β=<1, 0>
In addition to this, the observation component at our
architecture is able to identify the spatial coordinates
of the game piece which has been moved. These
bundles of data are submitted to the Decision-
making process as will be explained at the next
section, in which the appropriate action is to be
selected.
4 DECISION MAKING
PROCEDURES
During the interaction procedure, the human teacher
sometimes plays random steps. In this case the
concluded information from the observation process
β, are sent to the Decision-making process ψ as.
Ψ (X, Φ, β, δ, τ, σ, ρ)
│
N
=∑
i
q
= 1
B (9)
In the proceeding equation, the Decision-making
main frame Ψ produces a number q for an individual
behaviours B orchestrated by the robot at any step N
while interacting with the human teacher. The
behaviour B is a combination of the motor-
expressions M and/or utterance-expressions U.
B = < M, U >
In order to orchestrate a suitable behaviour in
response to the interaction situation, the decision-
making process Ψ, subscribes to the information
resulted from the observation component β, and also
the decision-making process subscribes to the
archive Φ by performing a process tracking
procedure τ shown in equation (10);
τ
=
X
N
∩ Φ (10)
This resulted information from the process tracking τ
provides Ψ the necessary information in order to
perform hypothetical scenario σ, which is the
resultant data from the union of process tracking
information τ and knowledge data ρ as shown in
equation (11)
.
This enables the robot to predict and
decide the new step of the task which as follows;
σ = τ
∪ ρ
(11)
The knowledge ρ which the robot obtains through
interacting with its human teacher which as follows;
ρ
=
{X׀
m
│δ
│
1
, X׀
m
│δ
│
2
,
X׀
m
│δ
│
3
,..,X׀
m
│δ
│
i
} (12)
Where X is the matrix resulted from the interacting
with the human teacher, at the ith situation which the
human teacher teaches the robot a specific action δ.
This matrix is stored at the long-term memory, m is
the index as in ((no_of_steps_played, no_of_stage,
max_no_of_steps_played) where
max_no_of_steps_played is the end step played for
the same stage index no_of_stage.
As explained the robot is able to interact with the
human while learning the task through different
A GAME PLAYING ROBOT THAT CAN LEARN A TACTICAL KNOWLEDGE THROUGH INTERACTING WITH A
HUMAN
613
expressions. Let us consider the following
interactive situations that occurred while teaching
the robot the X-O game.
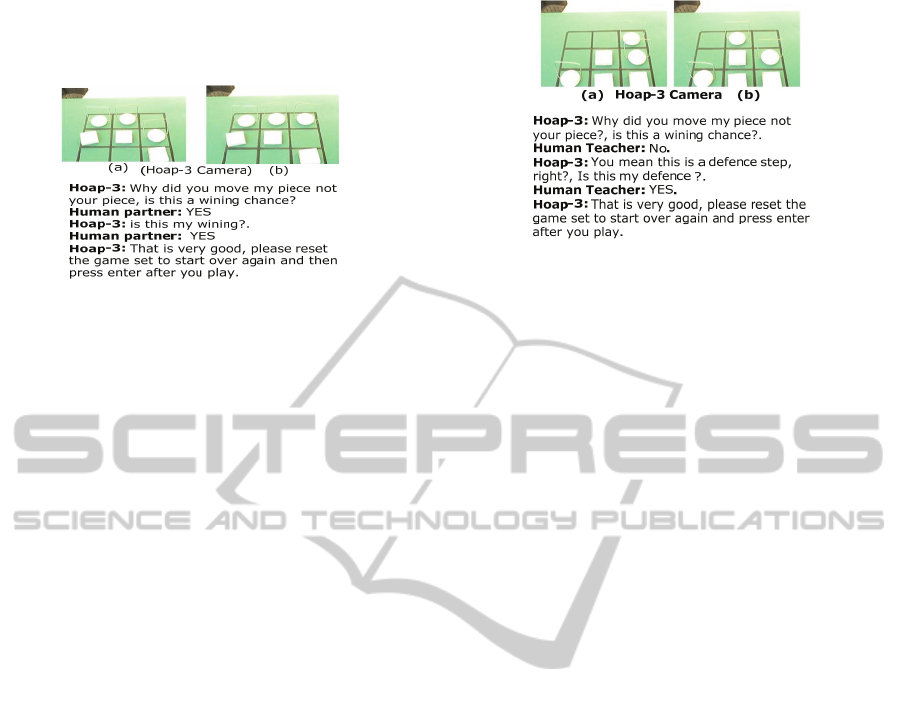
Figure 5: Teaching "Hoap-3" how to achieve winning.
5 TESTING AND EVALUTING
OUR ARCHITECTURE
In order to evaluate the proposed architecture, we
have performed an experiment in which various
interactive situations have been taken place, and
among these situations, a situation at which a
winning chance is available for the robot as in figure
(5-a). However as there is no any data provided in
advance, the robot will not be able to recognize it.
Human teacher, at his playing turn, performs an
interrupting step by moving the robot’s game piece
instead of his game pieces to set the winning row as
in figure (5-b), then prompts the robot to play. The
robot applies low-level identification, starting from
analysing the data streams from the vision sensors,
and obtains the resultant matrix Χ (h,r), which is
stored as a archived data Φ (see equation 2 ). On the
other hand a single piece of data λ (see equation 3)
(see figure 2) which in our present situation is the
matrix in figure 5-a. After applying the observation
algorithm in equations (6) and (7) which leads to
higher level observation β at equation (8), the
following β is obtained;
β =<0, 1>
This information is submitted to the Decision-
making procedure Ψ, which orchestrates number q
of individual behaviour B such as moving the
robot’s upper-torso in addition to its arm through the
arm motor-expressions motor-expressions M, in
addition to this, the Ψ orchestrates an utterance-
expressions U as in figure 2.
The utterance-expression provides the necessary
information as
ğ
N
={ ğ
N
│
is_winning
=1
,
ğ
N
│
my_wining
=1,
ğ
N
│
is_defence
=0, ğ
N
│
my_defence
=0},
which purify the purpose of the human-teacher
action δ.
Figure 6: Teaching "Hoap-3" how to make a defence step.
As the structured interview shows, the robot asks
the human teacher to reset the game set in order to
restart a new stage.
On the other hand the knowledge ρ of the robot
must be updated. Therefore the structured interview
result ğ
N
and the two matrixes as in figure (5-a, 5-b),
are stored at a different register as a long term
memory as a knowledge data ρ at index m (see
figure 2). Noting that the index N is turned into m
which holds the index N in addition to storing
no_of_steps_played as max_no_of_steps_played
which is useful for the robot whenever using the
knowledge ρ data for making a decision.
Another situation that is a chance to teach the
robot how make a defence step is available as shown
in figure (6). For the pesent situition the same
procces starting from Χ (h,r), until updating the
knowledge ρ takes place. The only different is the
structured interview resultant data ğ
N..
Which is
follows;
ğ
NX
={ ğ
N
│
is_winning
=0
,
ğ
N
│
my_wining
= 0,
ğ
N
│
is_defence
=1, ğ
N
│
my_defence
=1}
This leads to inform the robot the high level context
of the teacher’s action δ. Also an updating the
knowledge data ρ is being performed.
In a different situation, at which the human
teacher aims to teach the robot the form of his
winning as shown in figure (7-a). Human plays and
gets the available winning chance as in figure (7-b),
and then he prompts the robot to start playing. Now
we should start a new playing stage due to the
wining that was achieved for human partner.
As there is no data provided in advance, the
robot will not recognize it and starts to play
randomly and may be as in figure (7-c), and then it
prompts its human partner to play. In order to teach
"Hoap-3" how human wining is achieved, human
partner will not move any of the game pieces then it
prompts the robot to play. In this situation high-
level observation β and results as follows;
β =<0, 0>
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
614

Figure 7: Teaching "Hoap-3" how human winning is
achieved.
This means there is no any of the game pieces
have been moved. This data is submitted to decision
making main frame Ψ which orchestrates a new
structure interview based on the real-time interaction
as figure 7 shows. Also the same procedure is
followed by the robot. However the resultant data
from the structured interview ğ
N
is different for the
previous two situations, which as follows;
ğ
NX
={ ğ
N
│
is_winning
=1
,
ğ
N
│
my_wining
= 0,
ğ
N
│
is_defence
=0, ğ
N
│
my_defence
=0}
Also another different in this situation is that the
data X׀
m
that submitted to knowledge updating ρ
includes the matrix figure 5-a.
During the interaction procedure, the human
teacher sometimes plays random steps. In this case
the observation data is obtained as follows;
β =< 1,0 >
This informs "Hoap-3" that the movement made by
its human teacher is a regular step. In this case
decision making process Ψ performs a different
procedure from the previously explained situation.
The first procedure is performing process
tracking τ by matching the present matrix X
N
with
the archive data Φ as explained in equation 10 (see
figure 2) if τ = < empty> the robot plays randomly
(see figure 2). However, if τ
≠ < empty> the robot
unites the resultant data from τ with the knowledge
data ρ.
The knowledge data ρ includes the high level
context of every interactive action δ│ğ
N
made by its
teacher. Based on this union, the robot performs a
hypothetical scenario σ in order to make a rational
choice. However, if the process tracking is τ
> 1 then
the hypothetical scenario’s σ main priority is given
to choose knowledge as follows;
ğ
NX
={ ğ
N
│
is_winning
=1
,
ğ
N
│
my_wining
= 1,
ğ
N
│
is_defence
=0, ğ
N
│
my_defence
=0}
Table 1: Statistics of teaching experiment.
Order of the tenth sample space "Hoap-3"
Winning
Achievement
"Hoap-3"
Interviewing its
Human-teacher
First 10
th
sample space 0 10
Second 10
th
sample space 1 9
Third 10
th
sample space 4 6
Fourth 10
th
sample space 4 6
Fifth 10
th
sample space 4 6
Sixth 10
th
sample space 1 9
Seventh 10
th
sample space 3 7
Eighth 10
th
sample space 5 5
Ninth 10
th
sample space 8 2
Tenth 10
th
sample space 9 1
If the hypothetical scenario σ > 1, then the robot’s
final decision Ψ is by choosing an action resembles
the stage which has the minimum difference
between max_no_of_steps_played and
no_of_steps_played of the X
N
at which its main
priority is achieved.
∆│
min
=max_no_of_steps_played - no_of_steps_played
The second priority is given to
ğ
NX
={ ğ
N
│
is_winning
=0
,
ğ
N
│
my_wining
= 0,
ğ
N
│
is_defence
=1, ğ
N
│
my_defence
=1}
Also if the hypothetical scenario σ
> 1 "Hoap-3"
final decision Ψ is by choosing an action resembles
the stage which has the minimum difference
between max_no_of_steps_played and
no_of_steps_played of the X
N.
From these combinations, the robot is able to
select only rational choice, then the robot says as
follow:
Hoap-3: I think I can win.
Among the individual B (see equation 9) expression
which the robot performs various motor expressions
are made such as upper-torso, hip movements, head
movements, and arms movement. These expressions
improve and imply the human-human behaviour.
6 RESULTS
In order to show the efficiency of our proposed
architecture, we performed an experimental test
composed of 100 stages and its sample space is as
shown in Table 1. New stage occurs if the robot
0
5
10
1 112131415161718191
winning
achievment
LearningRate
A GAME PLAYING ROBOT THAT CAN LEARN A TACTICAL KNOWLEDGE THROUGH INTERACTING WITH A
HUMAN
615

learns new idea about the winning or defence for
itself or for the human. Also if a winning case of the
taught ones to the robot is performed by the robot
itself. The results at the table are indicated at the
graph, shows that the rate of winning achieved by
the robot is increased gradually, which indicates that
robot learning level is increased by the increasing
the number of interactive stages. This is a clue for
improving robot knowledge of the game strategy.
7 DISCUSSION
We will now reflect some design issues on our robot
architecture from two perspectives: component
design and communication of information between
components.
7.1 Information Generation
An important requirement is the need of building an
approach that is able to generate new valuable
information to be based and resulted from the
available information. For example, in the X-O
game, observation component is able to detect the
spatial positions of the moved game piece with
respect to the camera frame in terms of 2-D. This
coordinates information is processed by position
component and transformed into 3-D, and
transferred to knowledge-updating, allowing "Hoap-
3" to use when executing knowledge based
decisions.
7.2 Information Flow
In order to improve the overall system
responsiveness, we have found that one-to-many
information flow structure is very useful. Where, the
information is produced by one component and
published to the system, where, other components
process this information for their own purposes. For
example, during the X-O game, the human partner
performs interruptive movements to the game;
observation component detects these interruptive
events. The resultant detected information is
published to the rest of the system. Simultaneously,
the published information is handled by other
component. The decision-making process uses this
information in order to decide the proper choice of
wording of the structured interviews. Meanwhile,
the detected information in addition to the resultant
interviewing flags are used to update "Hoap-3"
knowledge.
REFERENCES
Sweller, J., 2006. Visualization and instructional design.
In3rd Australasian conference on Interactive
entertainment, Vol, 207,pp 91-95.
Bransford, J., Brown, A., & Cocking, R, 2001. How
people learn. Brain, Mind, Experience, and School.
Expanded version. National Academy Press:
Washington, DC. p. 33.
Baddeley, A. D., 1996. Human Memory: Theory and
Practice. Hove: Psychology Press.
Marois, R. 2005. Two-timing attention. Nature
Neuroscience. In Nature Neuroscience. pp 1285-1286.
Kuniyoshi. Y., Inaba M., and Inoue H. 1994. Learning by
watching: Extracting reusable task knowledge from
visual observation of human performance. In IEEE
Transactions on Robotics and Automation, vol 10
pp.:799–822.
Voyles. R and Khosla P., 1998. A multi-agent system for
programming robotic agents by human demonstration.
In Proceedings of AI and Manufacturing Research
Planning Workshop.
Reeves, B. & Nass, C. 1996. The media equation—how
people treat computers, television, and new media like
real people and places. Cambridge, UK: Cambridge
University Press.
Lockerd A., Breazeal C. 2004 Tutelage and socially
guided robot learning”. In Proceedings. International
Conference on Intelligent Robots and Systems,
IEEE/RSJ Vol. 4, pp. 3475 – 3480..
Nicolescu M. N., Mataric M. J., 2001. Learning and
interacting in human-robot domains” In Systems, Man
and Cybernetics, Part A: Systems and Humans, IEEE
Transactions on Vol. 31 No.5. ,pp. 419 – 430.
Barry Brian Werger, 2000. Ayllu: Distributed port-
arbitrated behaviour-based control. In Proc., The 5th
Intl. Symp. On Distributed Autonomous Robotic
Systems, Knoxville, TN, pp. 25–34
Maes P. and Brooks R. A. 1990. Learning to coordinate
behaviours. In Pros AAAI, Boston, MA, pp.796-802.
Mahadevan S. and Connell J., 1991. Scaling reinforcement
learning to robotics by exploiting the subsumption
architecture. In Proc. Eighth Int. Workshop Machine
Learning, pp.328-337.
Lauria S., Bugmann G., 2002 Mobile robot programming
using natural language. Robotics and Autonomous
Systems, 38(3-4):171–181.
Brian S, Gonzalez J. 2008. Discovery of High-Level
Behaviour from Observation of Human Performance
in a Strategic Game. In Systems and Humans, IEEE
Transactions on Vol. 38 No.3, pp. 855 – 874.
Mahnmoud, R. A., Ueno, A., Tatsumi S., 2008, A game
Playing robot that can learn from experience. In
HSI’08 on Human System Interactions pp. 440-445.
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
616
