
A “CONTEXT EVALUATOR” MODEL FOR A MULTIMODAL
USER INTERFACE IN DRIVING ACTIVITY
Jesús Murgoitio, Arkaitz Urquiza, Maider Larburu and Javier Sánchez
Robotiker - Tecnalia, Parque Tecnológico-Modulo 202, E-48170 Zamudio, Spain
Keywords: User interface, Automotive, Multimodality, Context evaluation, Ambient intelligence.
Abstract: Focused on new HMI for vehicles, this paper explains the methodology followed by Tecnalia to provide an
evaluation of the context, based on sensors data, in order to achieve the optimum usability and ubiquity
levels at any given moment, and finally to optimize the driving task from the safety point of view. The paper
is divided into three sections. Firstly, there is an introduction in which the main concepts, multimodality and
Ambient intelligence, are explained (section 1), and this is followed by the two projects related to the work
shown here (section 2). In section 3 we will go on to describe the methodology used to obtain an evaluation
of the context, as is necessary for a car HMI with multimodal capabilities. Finally, a particular “Context
evaluator” is displayed in order to illustrate the methodology and report the work carried out.
1 INTRODUCTION
In order to decrease the number of accidents
together with sustainable aspects, MARTA project
(here and after MARTA) kicked off in September
2007. MARTA, is an initiative coming from the
Spanish automotive industry, leaded by Tier 1
Ficosa International and contributed by relevant
partners such as SEAT Technical Centre and first
telecommunications operator Telefónica. The project
is supported by the Spanish Ministry of Science and
Innovation through CENIT Program managed by the
public organisation Centre for the Development and
Industrial Technology (CDTI). MARTA is focused
in the study of the scientific bases and technologies
of transportation for the 21rst Century that will lead
to an ITS (Intelligent Transportation System). In
particular, the main objective of MARTA is vehicle-
to-vehicle and vehicle-to-infrastructure communi-
cations, in order to develop new technological
services and solutions to improve road mobility.
These intelligent systems of the future will
contribute to decrease the number of accidents, to
assess drivers so as to reduce energy consumption
and finally, to provide on-board services for better
information and minimizing the traffic congestion.
SEAT Technical Centre has an important and
participative role in MARTA, as vehicle integral
development center of SEAT car manufacturer. This
paper is referred to Tecnalia research specifically
developed under SEAT Technical Centre HMI
research activities inside MARTA in which Tecnalia
is involved in close collaboration with Cidaut R&D
Center and Rücker-Lypsa Engineering.
Developments in recent years in the field of
electronics and applications in the automotive sector
(today around a third of the overall cost of cars is
due to electronics) have made it possible to integrate
within vehicles new technologies such as mobile
phones, global positioning (GPS) or driving assistive
systems (ADAS), among others.
Thus, as new applications and functionalities are
being added to cars, the number of devices is
increasing, as is the quantity of information for the
vehicle driver. Consequently, there is an increasing
demand for more efficient control architectures and
technologies, especially for managing the data
provided to the driver by the HMI (Human Machine
Interface) mainly in order to not disturb him from
his main activity, driving, and to maintain and/or
improve the safety for everybody involved: driver,
car passengers and pedestrians.
Since so much information can have a strong
negative influence if it is not correctly handled and
displayed, particularly in terms of decreasing safety,
Tecnalia has been working on a particular
methodology and the corresponding “Context
Model” solution, oriented to evaluating the context
and then providing information to take decisions
about “what data” to show, “where” (screens, head-
617
Murgoitio J., Urquiza A., Larburu M. and Sánchez J..
A “CONTEXT EVALUATOR” MODEL FOR A MULTIMODAL USER INTERFACE IN DRIVING ACTIVITY.
DOI: 10.5220/0003183206170624
In Proceedings of the 3rd International Conference on Agents and Artificial Intelligence (ICAART-2011), pages 617-624
ISBN: 978-989-8425-40-9
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

up displays, speakers, haptic pedals, and so on), and
“when”, taking the following two essential concepts
into account:
Multimodality: Multimodality is regarded as the
characteristic which allows for human-machine
interaction on two levels: Firstly, users with
different skills can inter-actuate with machines via
adapted Input/Output devices. Furthermore, the
output can be adapted to the user context for
different environments, e.g. driving activity. Both of
these extend and improve the HMI.
AmI: AmI is the abbreviation for the concept of
“Ambient Intelligence”, the words chosen by ISTAG
(Information Societies Technology Advisory Group)
as a guiding vision to give an overall direction to
Europe’s Information Societies Technology
program. AmI stresses the importance of social and
human factors, and it is at the forefront of a process
which introduces technology into people’s lives in
such a way that its introduction never feels like a
conscious learning curve: no special interface is
needed because human experience is already a rich
‘manual’ of ways of interfacing to changing systems
and services.
So, focusing on vehicle driving and taking
advantage of new technological solutions, e.g. voice
recognition, head-up displays, touch screens,
cameras, haptic pedals, and so on, Tecnalia proposes
a methodology designed to provide an evaluation of
the context based on several sensors data in order to
obtain the best usability and ubiquity levels for each
particular moment on every occasion and finally
optimize the driving task, mainly from the safety
point of view. Moreover, a particular model applied
within a project is also explained.
2 BACKGROUND
With respect to all the above mentioned, Tecnalia is
currently working on several projects to apply
paradigms such as multimodality and AmI to car
HMI and two of these are the following:
MIDAS (Oct’08-Sep’11): “Multimodal
Interfaces for Disabled and Ageing Society”.
MIDAS is an ITEA2 project aimed at improving the
autonomy, independence, and self-esteem of elderly
people and of people with various different kinds of
disabilities (visual-audition-mobility handicaps) by
introducing the most advanced technologies in their
everyday life by means of simple, predictable and
unobtrusive multimodal interfaces. MIDAS is
focused on home and driving scenarios,
representative of the indoor and outdoor
environments and Tecnalia is involved in driving
scenarios, mainly in the application of multimodality
to car HMI with a view to simplifying the user
interface.
MARTA (Jul’07-Dec’10): “Automation and
mobility for advanced transport networks”. National
project in Spain focused on mobility and transport
systems and how to apply ICT technologies to the
automotive sector. Tecnalia is involved in technical
& functional specifications, system designs and
developments related to HMI (Human Machine
Interface) within the vehicle, taking multimodality
concepts into account.
Based on the activities carried out and the
developments obtained up to now within these
projects, the following sections explain the context
evaluation methodology used in both (section 3),
and shows the specific “Context evaluator” module
prepared for the MARTA project (section 4).
3 CONTEXT EVALUATION:
METHODOLOGY
Driving activity is mainly a visual task but the
integration of new devices, information and safety
systems make it mandatory to have new modes to
inter-actuate with the vehicle, without reducing
safety levels of car occupants and indeed even
improving it.
Therefore a combination of different modes
(visual, haptic, voice,…) to access the information
related to the driving task has a strong influence on
driver alertness, and it appears to be very important
for the vehicle to have enough knowledge about the
current situation (Ambient) and to provide a model
of the context which is capable of helping with
decision taking about “what”, “where” and “how” to
show the information and command the vehicle
(HMI).
From this point of view, Tecnalia applies a
methodology based on four steps oriented to
preparing a model capable of reporting on any given
occasion summarised information to help with the
taking of decisions related to the HMI:
Actor’s Definition: This first step is aimed at
detecting the main entities to be considered within
the final model, and reducing the real world to the
most significant elements. In effect, this means a
modelling process which aims at the best abstraction
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
618

of a system capable of being as simple as possible
but without forgetting the essential data.
Sensors Selection and Grouping: Once the
problem has been reduced to the main actors, data
should be collected from all sensors or devices
capable of reporting information in the overall
system and related to each actor. This step is
completed with a grouping process to define specific
groups of sensors, each of which is related to a
particular actor (one actor could have more than one
group of associated sensors), but providing a well-
structured part of the actor behaviour.
Machines States Design: The third step of this
methodology is to design a machine state for each
group of sensors as previously defined. This
involves defining the main important states which
could be taken into account based on the different
range of values provided by each sensor in each
group of sensors.
Summarized States Definition: Finally, a
minimum software interface is defined in order to
provide the current status of the context according to
the particular resumed states coming from the
combination of states for each group of sensors and
taking each actor into account.
The next figure shows graphically the abstraction or
modelling process explained above:
Figure 1: Modelling process.
The following section illustrates this methodology
explaining the particular context evaluator designed
within the MARTA project (the same methodology
is being used in the MIDAS project).
4 MARTA
“CONTEXT EVALUATOR”
4.1 Actors
Actors are the system reference points for assessing
the current actual situation. So, taking the previously
explained methodology into account, three different
actors were considered to model the MARTA
context: Driver, vehicle and environment:
Driver: the person who handles the vehicle on
the roads. This is the most unpredictable component
inside a car; the system must be fully aware of the
driver’s condition.
Vehicle: the artefacts that the people use to move
from point A to point B.
Environment: this entity includes all
climatological conditions; in this case these will be
reduced to three: rain, fog and daylight.
This group of three actors defines a three dimensions
space (3D) due to the fact that each actor state is
defined by only one group of sensors, and the
corresponding machine state within the MARTA
context evaluator. This means that the MARTA
context model is fully defined by three coordinates
reported according to each state for the three
machine states corresponding to the three groups of
sensors, each of which is linked to each of the above
mentioned actors.
4.2 Sensors Grouping
Sensors are the group of devices which are able to
provide basic information (car speed, acceleration
etc.), both directly acquired from transducers or via
communication protocols available in the system,
e.g. typical CAN bus in vehicles.
Within the MARTA concept, the sensors
collection is shown below ordered by actor:
Apart from these sensors, an additional sensor
known as “ignition” is used to establish whether the
vehicle engine is switched on or off for each actor.
All this information collected by means of these
sensors enables us to prioritize any given message
over another depending on the context or the driving
situation for the car HMI (user interface) in the
MARTA project. In this way the real world is
reduced to three different groups of sensors, and the
corresponding machines states, and all the different
states for each group are explained in the next
section.
4.3 Machine States
As has been mentioned before, each group of
sensors has its own machine states representing the
behaviour of the related actor. Therefore, the
corresponding machines states designed for the
MARTA project are shown the following three sub-
sections for Driver, Vehicle and Environment.
A "CONTEXT EVALUATOR" MODEL FOR A MULTIMODAL USER INTERFACE IN DRIVING ACTIVITY
619
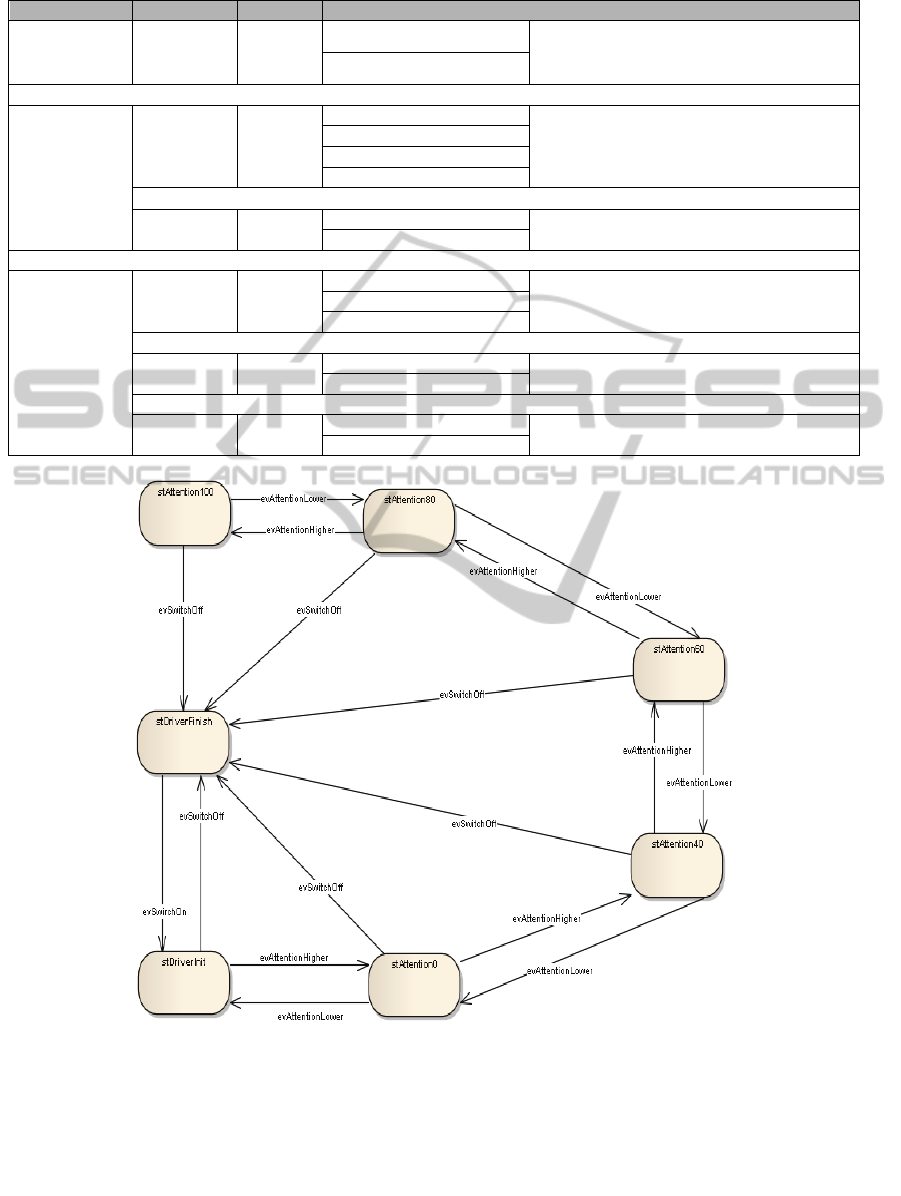
Table 1: Sensors.
Actor Sensor Units Meaning
Driver Drowsiness on/off
OK
Driver state (fatigue)
Fatigue
Vehicle
Speed Km/h
Stopped
Type of road derived from the car speed
Urban road
Extra-Urban road
Rural road or highway
Angular
Speed
m/s
2
Straight road or light curve
Type of road derived from the angular speed
Hard curve
Environment
Windscreen
wipers
Gears
(0-3)
No rain
Weather – Rain
Light rain
Hard rain
Fog lamps on/off
Good visibility
Visibility – (weather – fog)
Fog
Car lights on/off
Day
Visibility – (day/night)
Night
Figure 2: “Driver” Machine states.
4.3.1 Driver
The driver states are based on the drowsiness sensor,
and taking into account the different levels and the
information given by this sensor, the machine state
for the MARTA context evaluator is as follows. As
the sensor provided is able to detect four different
levels, the following machine states have been
designed taking seven different states into account:
The meaning of some of the “events” is
explained in the following table:
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
620
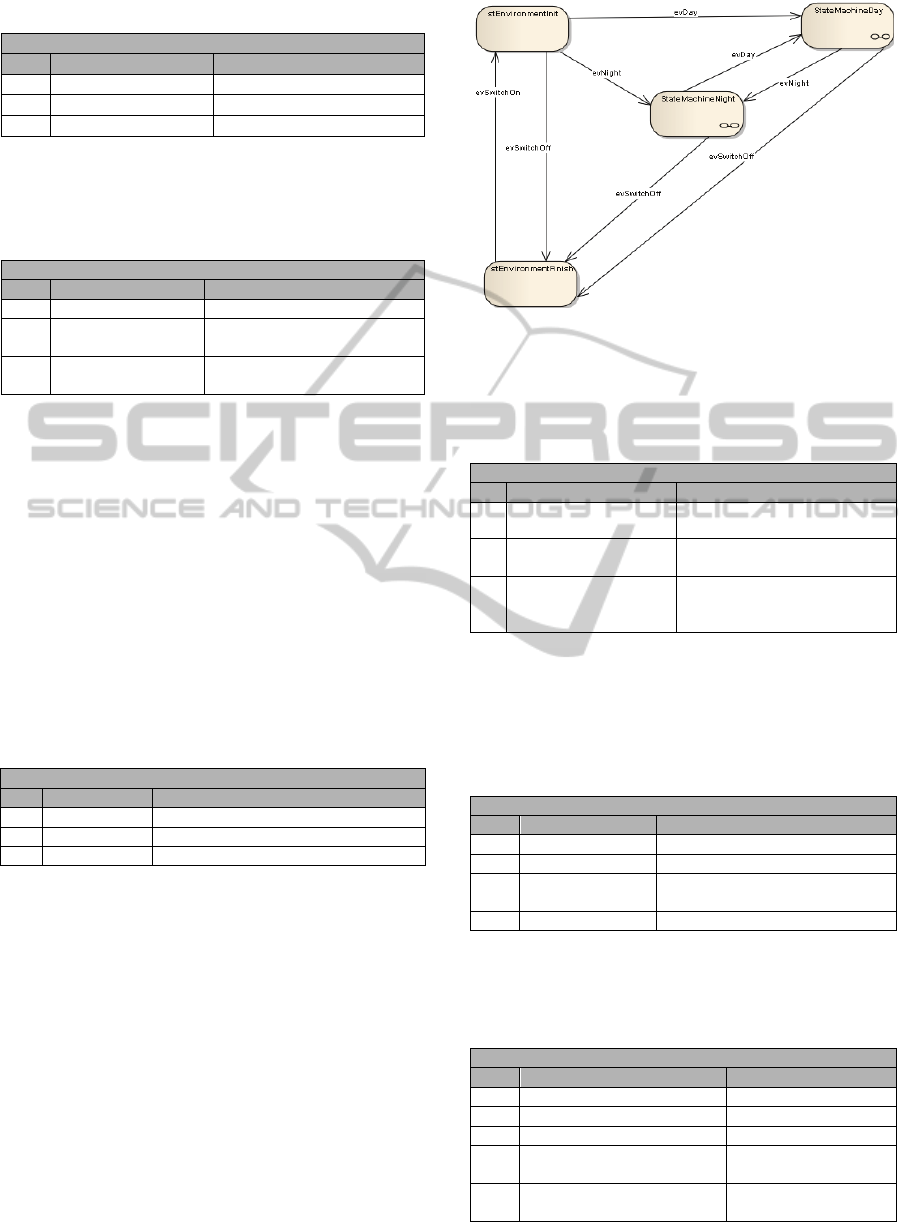
Table 2: Driver - Events.
Driver
Id Events Meaning
999 evSwitchOff Ignition key turned to “Off”
210 evAttentionLower
A
ttention level has decrease
d
200 evAttentionHigher Attention level has increased
The meaning of some of the “states” is explained in
the following table:
Table 3: Driver - States.
Driver
Id States Meaning
210 stDriverInit Vehicle switched off
240 stAttention60
Driver with low level of
drowsiness
260 stAttention100
Driver with optimal attention
level
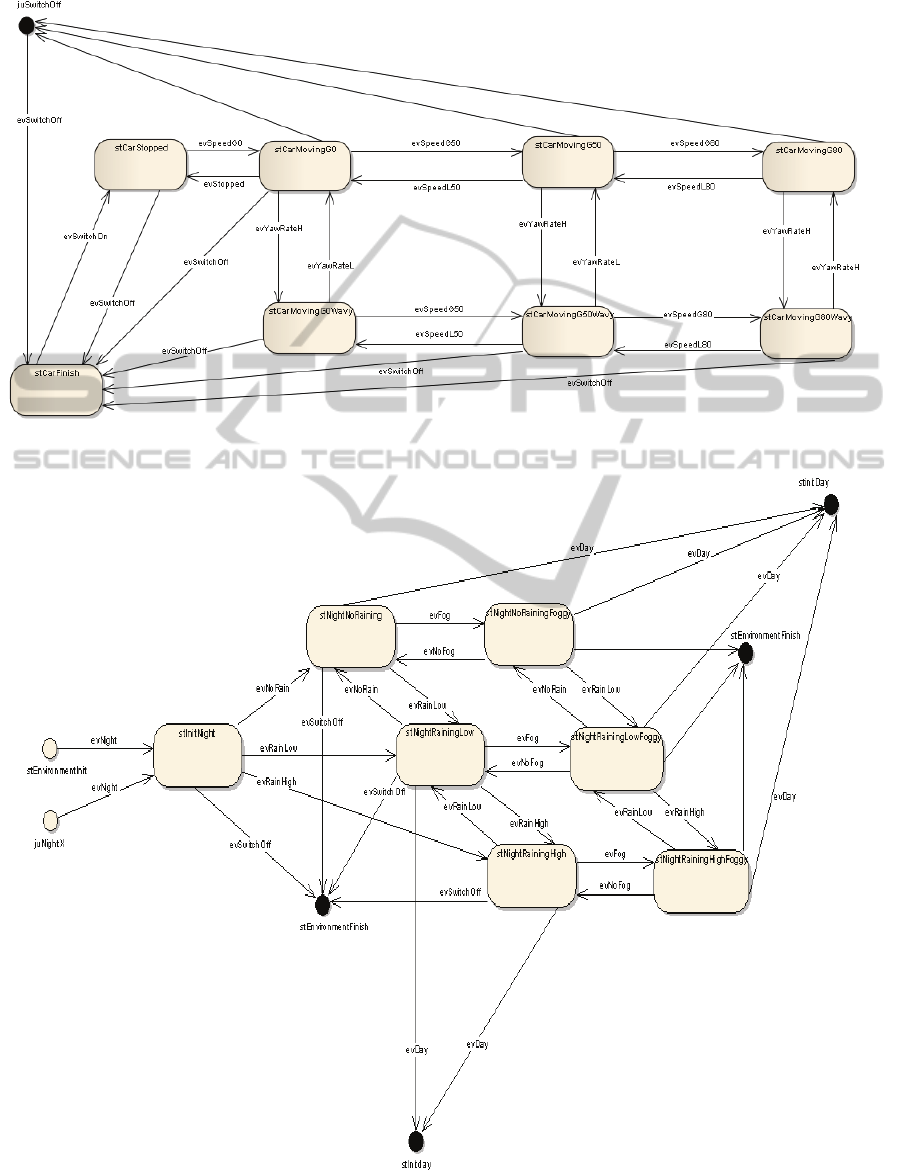
4.3.2 Vehicle
The vehicle states are mainly based on two sensors
(speed and angular speed), and taking the
information given by these sensors into account, the
following machine state has been designed for the
MARTA context evaluator:
The vehicle states take into account the speed
and the angular speed sensors, and the combined
information from these sensors generates the
machine states shown in “Appendix” – figure 4.
The meaning of some of the “events” is
explained in the following table:
Table 4: Vehicle - Events.
Vehicle
Id Events Meaning
20 evSwitchOn Ignition key turned to “On”
120 evSpeedG80 Vehicle overtakes 80 km/h
150 evYawRateH Angular Speedy greater than 2,5 m/s
2
4.3.3 Environment
The “environment” machine states uses mainly the
information given by four sensors (windscreen
wipers, fog lamps and car lights).
The possible states are collected by three figures:
the first one is the general one (see figure 3), and the
next two correspond to the “night” and “day”
concepts according to the car lights button position,
meaning that if the car lights are switched on it is
supposed that the environment light is not sufficient
and the driver is driving at night. Otherwise the
driver is driving during the day (see “Appendix” -
figures 5 and 6).
Figure 3: General part of “Environment” Machine states.
The meaning of some of the “states” is explained in
the following table:
Table 5: Vehicle - States.
Vehicle
Id States Meaning
110 stCarStopped Vehicle switched “On”
160 stCarMovingG80
Vehicle moving
speed (km/h)>80
150 stCarMovingG50Wavy
Vehicle moving
50<Speed (km/h)<=80
and hard curve
In the same way as for the “Driver” and “Vehicle”
actors, the meaning of some of the “events” defined
in the previously mentioned machines states for the
“Environment” are explained in the following table:
Table 6: Environment - Events.
Environment
Id Events Meaning
20 evSwitchOn Ignition key turned to “On”
305 evNight Car lights turned on (Night)
320 evRainLow
Windscreen wipers turned on
with low speed
360 evNoFog Fog lamps turned off (No Fog)
The meaning of some of the “states” is explained in
the following table:
Table 7: Environment - States.
Environment
Id States Meaning
310 stEnvironmentInit Vehicle switched off
999 stEnvironmetFinish Vehicle switched on
360 stInitNight Start of the “Night”
375 stNightRainingLow
Night / Light Rain /
No Fog
380 stNightRainingLowFoggy
Night / Light Rain /
Fog
A "CONTEXT EVALUATOR" MODEL FOR A MULTIMODAL USER INTERFACE IN DRIVING ACTIVITY
621

4.4 Interface
The interface of the MARTA “Context evaluator”
system has the following methods to change the
state of a sensor and to retrieve information from it:
mGetContext(): return a vector of values that
contains information about the actual state of the
actors.
mGetResumeContext(): return a context of the
vehicle determined by an integer, where:
0–> ignition off, 1–>ignition on (car stopped), 2–>
favourable, 3 –> risky, 4 –> critical;
mReset(): assign the state Id=“999” to all actors,
resetting all machines states.
mSetSensor(int IdSensor, int Level): assign a
specific level (Level) to a sensor (IdSensor).
5 CONCLUSIONS
The main conclusions which could be mentioned
related to this work, the concept of “Context
evaluation”, the necessity for new HMI for cars, and
specially when it is applied the multimodality are the
followings:
Developments in recent years in the field of
electronics and applications in the automotive sector
have made it possible to integrate within vehicles
new technologies (mobile phones, GPS or ADAS).
The quantity of information for the vehicle driver
is increasing due to new applications and
functionalities are being added to cars.
Much information can have a strong negative
influence in terms of decreasing safety.
Consequently, there is an increasing demand for
more efficient control architectures and
technologies, especially for managing the data
provided to the driver by the HMI in order to not
disturb him from driving.
Tecnalia propose a particular methodology and
the corresponding “Context Model” solution,
oriented to evaluating the context and help on taking
decisions about “what data” to show, “where”, and
“when”, taking two essential concepts into account:
Multimodality and Ambient Intelligence.
Tecnalia “Context model” methodology is based
on four steps oriented to preparing a model capable
of reporting on any given occasion summarised
information to help with the taking of decisions
related to the vehicle HMI: Actors’ definition,
Sensors selection and grouping, Machine States
design, and Summarized states definition.
ACKNOWLEDGEMENTS
All activities reported in this paper have been
collected from tasks carried out within two R&D
projects supported by “Ministerio de Industria,
Turismo y Comercio” of Spain: MIDAS (TSI-
020400-2008-26) and MARTA (CENIT).
REFERENCES
David J. Wheatley, Joshua B. Hurwitz. The use of a multi-
modal interface to integrate in-vehicle information
presentation. User Centered Research, Motorola Labs,
Schaumburg, Illinois, USA, 2001.
Roberto Pieraccini, Krishna Dayanidhi, Jonathan Bloom,
Jean-Gui Dahan, Michael Phillips, Bryan R.
Goodman, K. Venkatesh Prasad. A Multimodal
Conversational Interface for a Concept Vehicle. The
Id: Graduate Faculty, Psychology Society Bulletin,
Volume 1, Nº1, 2003.
Gregor McGlaun, Frank Althoff, Hans-Wilhelm Ruhl,
Michael Alger, Manfred Lang. A Generic Operation
Concept for an Ergonomic Speech MMI Under Fixed
Constraints in The Automotive Environment. Institute
for Human-Machine Communication, Technical
University of Munich.
Alfonso Ortega, Federico Sukno, Eduardo Lleida,
Alejandro Frangi, Antonio Miguel, Luis Buera,
Ernesto Zacur. AV@CAR: A Spanish Multichannel
Multimodal Corpus for In Vehicle Automatic Audio-
Visual Speech Recognition. Communication
Technologies Group and Computer Vision Group,
Aragon Institute of Engineering Research (I3A),
University of Zaragoza, Spain, 2004.
Kai Richter, Michael Hellenschmidt. Interacting with the
Ambience: Multimodal Interaction and Ambient
Intelligence. Position Paper to the W3C Workshop on
Multimodal Interaction, 19-20 July 2004.
Fabio Paternò. Multimodality and Multi-device Interfaces.
ISTI-CNR, Pisa, Italy, 2004.
Frank Althoff, Gregor McGlaun, Manfred Lang, Gerhard
Rigol. Comparing an Innovative 3D and a Standard
2D User Interface for Automotive Infotainment
Applications. Institute for Human-Machine
Communication, Technical University of Munich.
2003.
Murgoitio J, Fernández JI. Car driver monitoring by
networking vital data. Advanced Microsystems for
automotive applications, AMAA 2008; 37-48.
Sanchez Pons Francisco, Sanchez Fernadez David, Saez
Tort Marga, Gonzalez Garcia Pilar, Robleda
Rodriguez Ana Belen. Data Fusion Strategies for Next
Generation ADAS: Towards Full Collision Avoidance.
FISITA 2010, 30 May-4 July 2010.
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
622
APPENDIX
Figure 4: “Vehicle” Machine states.
Figure 5: “Environment–Night” Machine states.
A "CONTEXT EVALUATOR" MODEL FOR A MULTIMODAL USER INTERFACE IN DRIVING ACTIVITY
623
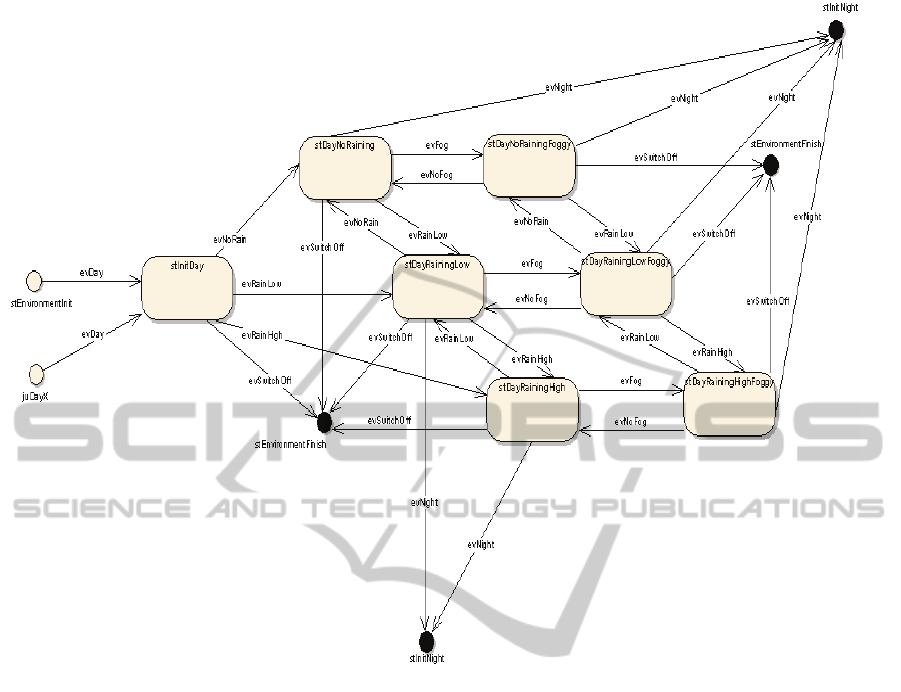
Figure 6: “Environment–Day” Machine states.
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
624
