
INTERVAL BASED INTEGRATED REAL-TIME COORDINATION
FOR MULTI-AGENT SYSTEMS
Ghulam Mahdi and Abdelkader Gouaich
LIRMM, Univ. Montpellier 2, UMR 5506 - CC 477, 161 Rue Ada, 34095 Montpellier Cedex 5, France
Keywords:
Coordination, Real-time, Interval algebra, Games.
Abstract:
Real-time computations in agent based simulations and (serious) games possess an inherent element of tempo-
ral relationships as well as time constraints for their performance and utility measures. Such time relationships
and temporal constraints can be observed in individual agent behaviors as well as coordination process involv-
ing multiple agent. The temporal relationships and time constraints in multi-agent coordination come in terms
of message passing, resource management and negotiations. The idea behind such temporal relationships and
time constraints is to efficiently handle complex interactions as different patterns of coordination emerge as
per the updated situations under certain time durations. Here we propose our position about integrating both
dimensions of individual and collective coordination in a unified manner where the coordination patterns are
expressed through Allen’s interval paradigm. We also introduce concept of “timers” to ensure real-time with
explicit expressiveness of the interval paradigm.
1 INTRODUCTION
One of important issues in multi-agent systems
(MASs) based games and simulation is to deal with
the interaction of the user(s)’s actions at one end
while keeping track of internal coordination of the
game/simulation objects. In most of the situations,
users need to interact with an application with little
care of number, time or resource availability of partic-
ipating game/simulation characters. However, if these
aspects of interaction are taken for granted, the results
may appear in either irrelevance to the real situation
or very poor user interaction.
The problem becomes more clear when we visu-
alize evolution of user actions and games objects’ in-
ternal interactions. Different scenarios emerge as the
system progresses as a result bringing complex pat-
terns of coordination. The games need to introduce
increasing complexity, maintain user interaction with
the game and progressively difficult scenarios to keep
up the user’s attention. Although all these aspects
need to be carried on throughout the game but defin-
ing every user, game interaction brings a quite cum-
bersome and bulky task for the game designers. Here
we are particularly interested in addressing coordina-
tion in agent-based simulations and (serious) games in
a way that complex patterns of temporal coordination
are expressed through very minimal primitive time
relationships between two events. We suggest Inter-
val script paradigm (Pinhanez et al., 1997) based on
Allen’s Algebra (Allen, 1984) to express temporal re-
lationships in real-time coordination for agent-based
(serious) games and simulations. Here we argue that
it is not only possible to express all temporal aspects
of coordination through a limited set of time relation-
ships but it may bring the “real-time” phenomenon
for these application domains by introducing “timer”
mechanisms.
The rest of article is structured as follows: the
first section discusses some motivations from earlier
works and real world scenarios for investigating co-
ordination issues; then the following section is about
characterizing some key aspects of coordination and
influence of “real-time” on them. We then describe
integrated approach of real-time coordination; then a
basic discussion on interval paradigm’s possible us-
age in the integrated real-time coordination is pre-
sented and finally, we conclude the article by a con-
clusion and future works of this study.
2 MOTIVATIONS
Real-time systems and multi-agents systems have in-
dividually contributed to many complex, heteroge-
664
Mahdi G. and Gouaich A..
INTERVAL BASED INTEGRATED REAL-TIME COORDINATION FOR MULTI-AGENT SYSTEMS.
DOI: 10.5220/0003188406640669
In Proceedings of the 3rd International Conference on Agents and Artificial Intelligence (ICAART-2011), pages 664-669
ISBN: 978-989-8425-40-9
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

neous and diverse real-world applications even before
joining hands to be applied in domains particularly
known for distributed, time-critical and autonomous
features. A transfusion of both disciplines has shown
quite interesting results in diverse domains ranging
from sensor networks (Sierra and Sonenberg, 2005)
and (Soh and Tsatsoulis, 2005) to virtual class rooms
(Liu et al., 2003) and from e-commerce applications
(DiPippo et al., 2001) to soccer robots (Kim et al.,
1997). Apart from these applicative studies of multi-
agent and real-time systems, many works have tried
to define, develop and implement efficient agent mod-
els presenting features of both disciplines (like (Julian
and Botti, 2004) and (Julian et al., 2004)) Some oth-
ers have focused on frameworks simulating such real-
time agents (Micacchi and Cohen, 2008); even others
align to developing joint architectures for such type
of agents (Soler et al., 2002) and (Carrascosa et al.,
2008)
However a fundamental issue of coordinating
MASs under real-time constraints has remained
largely unaddressed, even if some of works which
have tried to address the agent coordination are lim-
ited to focus on only one aspect of coordination in-
stead of addressing the issue in an integrated manner.
Our motivations to address the problem has theoreti-
cal as well applicative inspirations. From the perspec-
tive of applications, most of the real-time MASs are
functioning in resource-constrained environments.
In agent-based (serious) games and simulations
often situations presume a real-time behavior in game
and simulation objects’ behavior as well their inter-
action, communication and resource sharing. Taking
a simple example of a war jet in a game, it assumes
that when it is launched it has real-time perception of
enemy attacks, devising updated strategy of further
plan (reasoning), receiving and delivering message
instantaneously(message passing), sharing air space
with other fellow pilots (resource sharing) and abil-
ity for collected decision making (reaching an agree-
ment as a result of negotiations) all at once. Hereby,
addressing only one aspect of temporal constraints
may not address the overall issue but probably bring-
ing serious challenges to the performance and util-
ity for the users. Although the problem seems quite
challenging one and addressing all aspects of indi-
vidual agent performance and interaction with other
agents at each instant of time even unrealizable but
here we suggest a mechanism which introduces con-
straints on particular time relations. The time interval
relationships phenomenon introduced by James Allen
in (Allen, 1984) suggests introducing temporal rela-
tionships based on 13 primitive relations. These time
relations like a description based on what to do af-
ter/before/meet another interval. We find this line of
research quite interesting for agent based games and
simulations due to simplicity, explicit expressiveness
and generalization of the interval algebra. As the for-
malism is based on Allen Algebra’s 13 primitive time
relationships so almost all temporal aspects of coordi-
nation are expressed through primitive relationships;
similarly time relationships’ explicit characterization
brings a clear picture of the coordination at any par-
ticular instant; finally, as we per our fundamental the-
sis that all aspects of temporal constraints need to
be addressed under one roof, here this model fulfills
the condition in a very general manner. This “posi-
tion” nature of our work examines agent coordination
studies at different levels and suggests an integrated
as well comprehensive framework for efficient “real-
time coordination”.
Having a brief idea about the implications of “time
factor” in agent coordination, now we individually de-
scribe the factors involved in amelioration of “time
factor” in agent computations as argued by Mahdi et
al. in (Mahdi et al., 2010). By description of these
“performance contributors”, we argue that these pro-
cesses may be viewed as constituting aspects in global
agent coordination process for an integrated view of
“real-time coordination” in MASs. Here we describe
different studies on these “performance contributors”
and their role in integrated and comprehensive under-
standing of “real-time coordination” of MASs.
3 TIME NOTION UNDER
DIFFERENT ASPECTS OF
AGENT COORDINATION
3.1 Time in Message Passing
Assuming agents process incoming messages atom-
ically as soon as they receive them (or buffered in
the message inbox), we need to take care of how
much time it takes to deliver a message. Having tim-
ing constraints on the delivery of messages may play
a substantial role in managing temporal behavior of
the overall system. Embracing monitors that ensure
timely dispatch of the messages do not have to come
in conflict with the timing constraints in message pro-
cessing in a way that message delivery is not to breach
the agent encapsulation of how and when the message
is processed, rather it’s sole concern would be about
timely delivery of the incoming messages.Jamali et al.
(Jamali and Ren, 2005) suggest similar approach for
MASs in resource allocation. Although the approach
works quite nicely, but its performance improvement
INTERVAL BASED INTEGRATED REAL-TIME COORDINATION FOR MULTI-AGENT SYSTEMS
665

is limited to resource management, in other words,
it covers only one aspect of real-time performance in
MASs.
3.2 Time in Agent Reasoning
Once a message is passed to the concerned agent, it
may take time some time to read the message, eval-
uate the contract content and subsequently reply in
denial or follow the message contents. If time factor
is not involved in such message processing or agent
reasoning it would unnecessarily affect the agent per-
formance resulting in delay of overall coordination
process. Many works of Julien et al. (like (Ju-
lian and Botti, 2004), (Julian et al., 2004) and (Soler
et al., 2002)) are addressed on development, design
and implementation of real-time agents without con-
sidering coordination as the main subject of studies.
Here we need to make such models enough flexible
with other real-time computations like the above men-
tioned ones. In absence of timing constraints the sys-
tem processes the messages may take too much time
and leading to affect the overall progress of the sys-
tem.
3.3 Time in Resource Management
Agents being part of open systems compete for re-
sources due to sharing of independent computations.
Such competition to acquire resources leads to func-
tional and non-functional dependencies. Functional
dependencies are about whether sufficient resources
are available or not, how to acquire and release cer-
tain resources and how to deal with multiple requests
of the same resource at the same time. By non-
functional dependencies, we mean that availability (or
at least information of unavailability) of the required
resources in certain time bounds. Such availability
or unavailability information would be seen as an im-
portant factor in overall agent coordination. Here we
need to manage autonomy of agents in a way that
agents are not to be let to accumulate all the resources
so here some type of resource management behavior
is also recommended. Jamali et al. (Jamali and Ren,
2005)’s work on real-time resource allocations is sem-
inal on the subject that it not only ensures real-time
in resource allocations but also handles excessive re-
source acquisitions problem common to agents based
on actor model.
3.4 Time in Negotiations
Although agent coordination doesn’t imply cooper-
ation but many times coordination is seen as a co-
operative process to maintain heterogeneous body of
agents in an environment. Agent negotiations are
used as a means to reach an accord through commu-
nications. Agent negotiations are usually seen as a
compromising tool to mutual benefits of efficient re-
source usage and task distribution. Despite benefits
of reaching an agreement, agent negotiations process
is presumed as a costly and time consuming prac-
tice. When agent negotiations are left to work on
their momentum it would not only delay the coordina-
tion process but also consume unnecessary resources.
A model for real-time agent negotiations for sensor
networks is presented in (Soh and Tsatsoulis, 2005),
other important works on the subject include Kraus et.
al(Kraus et al., 1995) and Fatima et al. (Fatima et al.,
2002) but both of these works address negotiations to
be constrained by time rather than directly treating it
as real-time issue.
After a brief introduction of different real-time
mechanisms in MASs, we return to our earlier propo-
sition that coordination should be viewed as a meta-
collection of different aspects based on an integrated
approach covering all aspects of coordination. Here
we briefly discuss our proposition of an integrated
real-time coordination mechanism suggested for fully
realizing real-time through all aspects of temporal be-
havior.
4 INTEGRATED REAL-TIME
COORDINATION FOR
MULTI-AGENT SYSTEMS
Coordination in MASs has been studied from dif-
ferent perspectives of “real-time”, namely reasoning,
message passing , resource management and negotia-
tions. All these perspectives of real-time coordination
can be seen as “aspects” or “dimensions” in overall
agent computation and coordination process. Real-
time distributed computing processes can be viewed
as a composition of aspects (instead of a single co-
ordination process) where each process coordinates
with its comprising components along with other sub-
systems at its stage while being part of the global co-
ordination process. There are two approaches to see
the real-time coordination in MASs:
• Incorporating time constraints on individual pro-
cesses and coordination of any of the individual
process would of course bring amelioration in the
performance of that system but not at the optimum
level.
• Setting up a meta approach of real-time as well as
coordination in a way that the coordination is in-
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
666
volved at all aspects’ level which improves over-
all real-time performance of the system at global
level.
Our vision to see real-time agent coordination dis-
tinct from other coordination mechanisms may prove
useful in understanding both coordination as well as
real-time performance of MASs. Due to the differ-
ences in the architectures and performance measures
of different systems we suggest an integrated treat-
ment of “real-time” problem at the level of each as-
pect. Human societies also adopt coordination mech-
anisms which may involve myriad aspects, at some
extent seem even irrelevant but after all serve a global
purpose. Like an office working procedure may adopt
different procedures and aspects for their coordina-
tion and time constraints but after all it serves timely
performance of the main objective. Real-time MASs
have special architectural foundations and design as-
pects current approaches in real-time agent systems
were not set forth with those considerations therefore
there is a performance as well as efficiency gap in
effective agent coordination. Earlier studies on the
subject have either dealt scalable agent coordination
(Durfee, 2001) and (Durfee, 2004) or particularizing
coordination for different application domains (like
(Liu et al., 2003) and (DiPippo et al., 2001)). As
per our knowledge we haven’t seen studies on real-
time agent coordination which involves real-time in
all aspects, although similar studies are carried out
in robotics and communication domain from the per-
spective of coordination (Bouroche et al., 2006) and
communication(Mock and Nett, 1999).
5 ALLEN’S ALGEBRA FOR
INTERVAL-BASED
INTEGRATED COORDINATION
Given any situation of integrated coordination differ-
ent agents’ possible temporal interactions can always
be expressed through disjunctions of Allen’s primi-
tive time relationships between two intervals. A major
bottleneck in integrated coordination has been the ex-
pressiveness of the interactions at each instant of time
and the severity of the situation increases with any at-
tempt of describing all possible time points with all
four dimensions. The result of such situation emerges
in such a complexity that it becomes almost impossi-
ble to track interactions even if temporal constraints
are not there. Some of the primary motivations in-
clude unavailability of some strict timers to handle the
constraints (i.e. It is more inclined to timely comple-
tion of agent intervals than interrupting them unneces-
sarily); then there is relatively smooth and convenient
job at the programmers’ end that they have to handle
only the relevant relationship for any time instead of
managing all time instants; also the notion of disjunc-
tion of intervals can be incorporated to define mul-
tiple paths and interactions in a coordination mech-
anism, which makes it the best candidate mechanism
for any integrated approach; and finally a programmer
can integrate quantitative aspects of temporal behav-
ior through introducing timers to the qualitative no-
tion of time interval as per our requirements.
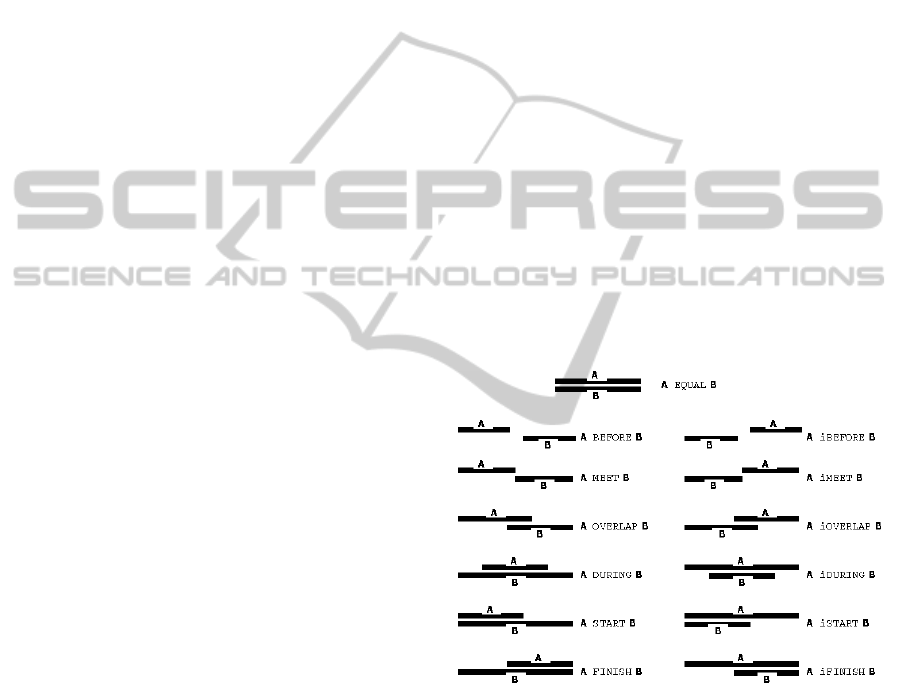
Interval script paradigm (Pinhanez et al., 1997)
based on Allen’s Algebra (Allen, 1984) to ex-
press temporal relationships between two inter-
val. The paradigm uses basic thirteen relation-
ships(summarized in Fig. 1) to express all type of
possible temporal relationships among agents. The
temporal relationships provide an explicit declaration
of time intervals between agents at one hand through
limited number of time relationships; on the other
hand it is enough flexible to determine implicit rela-
tionships between different agent (like if agent A is
BEFORE interval agent B and B is BEFORE agent
C, it can infer that interval agent A is BEFORE C).
Based on our proposed integrated approach of coor-
Figure 1: The possible 13 primitive relationships between
two agents (Allen, 1984).
dination we suggest that almost all of coordination
patterns can always be expressed through disjunction
of these these primitive time relationships. Taking a
game object’s coordinating with other game objects
can occur when the object either STARTS or FIN-
ISHES or happens DURING or is EQUAL to the in-
terval when the game object is in movement. In other
words, the time relationships between a game object’s
movement and interaction can be described by the dis-
junction of START,FINISH,DURING,EQUAL. Sim-
ilarly an agent’s behavior, negotiations and resource
INTERVAL BASED INTEGRATED REAL-TIME COORDINATION FOR MULTI-AGENT SYSTEMS
667

management can be expressed through these primi-
tive time relationships as in real occurrence any one
of the relationships can happen at a time. The main
task for the designer to do is determine the relation-
ships between the agent intervals along with defining
corresponding sensing and actuating routines for the
game objects.
5.1 Introducing Timers
Although one of the defining characteristic of the in-
terval paradigm is that it does not require any explicit
specification of the interval duration but as in our case
we address real-time issue we need some specific time
references. Hence, we suggest some timer mecha-
nism for an interval agent in a way that we have a
desired and actual constraints on the intervals as sug-
gested by (Pinhanez et al., 1997). The desired in-
terval can be used for turning the timer on and off
under specific time constraints; while actual interval
is used for triggering other actions as the timer ex-
pires. The usage of desired constraints ensures time
constraints on the interval agents while actual timers
are about the solution enough generic to handle nor-
mal routines where there is not any involvement of
time constraints.
5.2 Integrated Real-time Coordination
for Agent-based Games and
Simulations
Again taking the earlier mentioned example of a war
jet in a game, we can describe possible time relation-
ships and temporal constraints in a scenario. Con-
sidering space limitations and position nature of the
paper here we provide only few situation where the
interval phenomenon shows its applicability and sim-
plicity to apply:
• When a jet flies, wait for a message from the base
station BEFORE launching any attack.
• When in the air, in case of attack iBEFORE (after)
change the position to x units.
• When an enemy jet MEET your targeted range do
not wait for the message.
similarly all other temporal relationships of agent
reasoning, communication, negotiations and resource
management can be explicitly expressed through a
limited set of 13 primitive time relations; in addition
to that the “timers” can be implemented that in a way
that how many time units to wait BEFORE launching
an attack or any other situation in the game.
One of most difficult aspect of agent behavior and
coordination comes in keeping track of different ac-
tivities of game/simulation objects in the case of in-
tegrated coordination. It is often the case that in an
attempt to address all aspects of coordination the user
is unable to track even a single aspect and in our case
of real-time coordination it becomes even more dif-
ficult. The problem can be handled through the in-
terval approach in a way that there are conditions on
the time relationships rather than time instants how-
ever to maintain the real-time spirit timers ensure all
temporal constraints.
6 RELATED WORKS
Allen’s interval algebra has been used in different
application domains as a means to provide a deli-
cate balance between explicit expressiveness and effi-
ciency of its deductive engine. PNF calculus based on
Allen’s interval algebra developed by Pinhanez and
Bobick(Pinhanez and Bobick, 1996) for defining a
method to propagate occurrence information through
a network of intervals. The PNF calculus based
scripts were used by Pinhanez et al. in (Pinhanez
et al., 1997) for testing a story-based, interactive sys-
tem named SingSong. The system provides reac-
tive and interval script following computer-generated
partners to the human performers. Another important
work using interval script paradigm is handling vis-
itors’ musem intelligent visits intelligently(Pinhanez
and Bobick, 2003). The work handles time intervals
for visitors’ information, but once it discovers that the
visitor has changed its visiting course, modifies its in-
tervals as per the visitors’ latest location.
7 CONCLUSIONS
AND PERSPECTIVES
Here in this position paper, we have tried to un-
derstand the peculiarities of integrated real-time co-
ordination for MASs. We suggest that current ap-
proaches on the subject present some serious con-
cerns for understanding and applying coordination
models in MASs. Here in this paper, we have ar-
gued that real-time coordination has some different
implications when viewed from a global perspective
of “real-time” at different levels of multi-agent com-
putation and coordination. We are of the view that,
in order to support efficient coordination mechanisms
for real-time MASs, we need to understand the key
differentiating factors that make real-time coordina-
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
668

tion different in MASs. We have discussed different
aspects of “real-time coordination” in MAS and sug-
gested an interval based paradigm to address the par-
ticular related issues. Finally, we suggest “timers” to
introduce real-time in interval-based integrated real-
time coordination.
The approach discussed here would let both MAS
and real-time communities to see each other’s re-
quirements and prospectus in their domains. More
precisely, the agent community to see coordination
in MASs deal differently than it has been and the
real-time community to take a more realistic picture
about the agents’ functionality and effectiveness in
MASs. Clearly there is much left to be done. As a
future work, we plan to work on a formalism based
on Allen’s interval algebra for our suggested approach
for integrated real-time agent coordination.
REFERENCES
Allen, J. (1984). Towards a general theory of action and
time. Artificial intelligence, 23(2):123–154.
Bouroche, M., Hughes, B., and Cahill, V. (2006). Real-
time coordination of autonomous vehicles. In IEEE
Intelligent Transportation Systems Conference, 2006.
ITSC’06, pages 1232–1239.
Carrascosa, C., Bajo, J., Julian, V., Corchado, J., and Botti,
V. (2008). Hybrid multi-agent architecture as a real-
time problem-solving model. Expert Systems with Ap-
plications, 34(1):2–17.
DiPippo, L., Fay-Wolfe, V., Nair, L., Hodys, E., and
Uvarov, O. (2001). A real-time multi-agent system ar-
chitecture for e-commerce applications. In isads, page
357. Published by the IEEE Computer Society.
Durfee, E. (2001). Scaling up agent coordination strategies.
Computer, 34(7):39–46.
Durfee, E. (2004). Challenges to Scaling-Up Agent Coor-
dination Strategies. An Application science for multi-
agent systems, pages 113–132.
Fatima, S., Wooldridge, M., and Jennings, N. (2002). Multi-
issue negotiation under time constraints. In Proceed-
ings of the first international joint conference on Au-
tonomous agents and multiagent systems: part 1, page
150. ACM.
Jamali, N. and Ren, S. (2005). A layered architecture for
real-time distributed multi-agent systems. ACM SIG-
SOFT Software Engineering Notes, 30(4):8.
Julian, V. and Botti, V. (2004). Developing real-time multi-
agent systems. Integrated Computer-Aided Engineer-
ing, 11(2):135–149.
Julian, V., Soler, J., Moncho, M., and Botti, V. (2004). Real-
Time Multi-Agent System Development and Imple-
mentation. Recent advances in artificial intelligence
research and development, page 333.
Kim, J., Shim, H., Kim, H., Jung, M., Choi, I., and Kim,
J. (1997). A cooperative multi-agent system and its
real time application to robot soccer. In IEEE Interna-
tional Conference on Robotics and Automation, pages
638–643. Institute of Electrical Engineers Inc (IEEE).
Kraus, S., Wilkenfeld, J., and Zlotkin, G. (1995). Multia-
gent negotiation under time constraints. Artificial In-
telligence, 75(2):297–345.
Liu, X., Zhang, X., Soh, L., Al-Jaroodi, J., and Jiang, H.
(2003). A distributed, multiagent infrastructure for
real-time, virtual classrooms. In Proceedings of the
International Conference on Computers in Education,
pages 2–5. Citeseer.
Mahdi, G., Goua
¨
ıch, A., and Michel, F. (2010). Towards an
Integrated Approach of Real-Time Coordination for
Multi-agent Systems. Agent and Multi-Agent Systems:
Technologies and Applications, pages 253–262.
Micacchi, C. and Cohen, R. (2008). A framework for simu-
lating real-time multi-agent systems. Knowledge and
Information Systems, 17(2):135–166.
Mock, M. and Nett, E. (1999). Real-time communication
in autonomous robot systems. In isads, page 34. Pub-
lished by the IEEE Computer Society.
Pinhanez, C. and Bobick, A. (1996). PNF Calculus: Rep-
resenting and propagating time constrains in Allen’s
interval algebra. Technical report, Technical Report
389, MIT Media Laboratory Perceptual Computing
Section.
Pinhanez, C. and Bobick, A. (2003). Interval scripts: a pro-
gramming paradigm for interactive environments and
agents. Personal and Ubiquitous Computing, 7(1):1–
21.
Pinhanez, C., Mase, K., and Bobick, A. (1997). Interval
scripts: A design paradigm for story-based interactive
systems. In Proceedings of the SIGCHI conference on
Human factors in computing systems, page 294. ACM.
Sierra, C. and Sonenberg, L. (2005). A Real-Time Negoti-
ation Model and A Multi-Agent Sensor Network Im-
plementation. Autonomous Agents and Multi-Agent
Systems, 11(1):5–6.
Soh, L. and Tsatsoulis, C. (2005). A real-time negotiation
model and a multi-agent sensor network implementa-
tion. Autonomous Agents and Multi-Agent Systems,
11(3):215–271.
Soler, J., Julian, V., Rebollo, M., Carrascosa, C., and Botti,
V. (2002). Towards a real-time multi-agent system ar-
chitecture. COAS, AAMAS, 2002.
INTERVAL BASED INTEGRATED REAL-TIME COORDINATION FOR MULTI-AGENT SYSTEMS
669
