
A TEAM-BASED ORGANIZATIONAL MODEL
FOR ADAPTIVE MULTI-AGENT SYSTEMS
Afsaneh Fatemi, Kamran Zamanifar, Naser Nemat bakhsh and Omid Askari
Department of Computer Engineering, University of Isfahan, Isfahan, Iran
Keywords: Team-based organization model, Adaptive multi-agent system, Capability-based task allocation.
Abstract: Proper organizational modelling is a challenging issue in complex cooperative multi-agent systems. In this
paper, we propose a team-based multi-agent organizational model, based on the Schwaninger's model of
intelligent human organizations. It provides an integrative framework to rapid task handling, the main
effectiveness requirement in many applications. Adaptation via reorganization makes the model suitable for
dynamic, uncertain environments. Fast initial team formation, greedy capability-based coalition formation,
and using the nearest neighbours’ resources improve utility compared to the identified hierarchical
organizational models.
1 INTRODUCTION
Our everyday lives and specially our social
transactions require various types of coordination
that incorporate decision making process within a
dynamic uncertain environment under multiple
constraints. Cooperation between members is an
important coordination task which aims to maximize
the overall utility. Multi-agent systems (MASs) have
been widely used to model and probe the complex
behaviors in such cooperative systems.
Using organization theory, behavior of
individual agents can be described by the roles they
adopt and behavior of MAS may be predicted as the
result of their overall actions.
Organizational models defined for MASs are
mainly adopted from analogue models in human
communities (Boella and Van Der Torre, 2006).
In real world, we may face emergency systems
which need fast task handling. This rapidity is the
main effectiveness requirement of the system.
Rescue in emergency situations is an example,
where cooperative humans tend to use all their
capabilities to rapidly perform the tasks. They may
even prefer to act out of their role-specific
responsibilities in occasional situations.
In this paper, we propose a team-based multi-
agent organizational model, based on the
Schwaninger's model of intelligent human
organizations (Schwaninger, 2009). It provides an
integrative framework to rapid task handling.
Following, section 2 discusses some related
work. Section 3 introduces the proposed
organizational model. Section 4 shows some
experimental results, and in section 5 we conclude.
2 THEORY AND RELATED
WORK
A multi-agent organization can model a MAS as a
group of distributed agents following a common
goal. The interactions between the agents, the
relationships between the agent roles, and their
coordination style make the organizational design.
Several organizational Structures are introduced
in literature (Deloach and Matson, 2004), (Horling
and Lesser, 2005), (Kolp, Giorgini, Mylopolos,
2006) for modeling MASs. Besides, a variety of
adaptation methods for different organizations have
been proposed yet (Ghijsen, Jansweijer, and
Wielinga, 2009), (Kirn and Gasser, 1998), (Kota,
Gibbins, Jennings, 2009), (Martin and Barak, 2006),
(Rosenfeld, Kaminka, Kraus, Shehory, 2008. All of
these methods attempt to enhance the system
effectiveness using adaptation.
(Ghijsen et al., 2009) and (Kota et al., 2009) are
among the latest works performed in this field. In
(Kota et al, 2009) a Decentralized structural
adaptation method is proposed, where agents need to
reevaluate all their relations in each time step. This
469
Fatemi A., Zamanifar K., Nemat bakhsh N. and Askari O..
A TEAM-BASED ORGANIZATIONAL MODEL FOR ADAPTIVE MULTI-AGENT SYSTEMS .
DOI: 10.5220/0003190604690472
In Proceedings of the 3rd International Conference on Agents and Artificial Intelligence (ICAART-2011), pages 469-472
ISBN: 978-989-8425-41-6
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

reevaluation decreases efficiency regarding
increasing computation. It doesn’t consider
environment openness.
In (Ghijsen et al., 2009), tasks are made of sub-
tasks which are distributed among agents in lower
levels of hierarchy to be performed by them.
However, in many applications tasks should be
performed by groups of agents. Besides,
organization efficiency should be improved.
3 ORGANIZATIONAL MODEL
Organization model of MAS defines the structure,
roles and interaction pattern of constituting agents,
and the goal(s) of the system (Mintzberg, 1993).
Schwaninger (2009) has presented a comprehensive
organization model for intelligent human
organizations, as follows: An intelligent
organization is capable of changing to adapt with
varying environment, mutual effect on the
environment, and viability in the environment of its
comprehending organizations. In this model design,
control and development are known as main
components in systemic management that should be
considered along with system identity structure. A
framework including five aspects of activity,
structure, behavior, ethos identity vision, and time
seems appropriate to model an organization.
Here, we define structural model (that shows
organization designing), activity model (that shows
the entire functionality of organization) and behavior
model (that shows cooperation process of
organization components) to introduce an
emergency-response cooperative MAS. The time
dimension of schwaninger’s model is inherently
purposed in all structure, behavior, and activity
models. The fifth dimension of the model includes
ethos, identity, and vision. It is the center of
paradigmatic change, which hardly affects on all
three domains: Structure, behavior and activity. It
will be paid more attention in our future works.
3.1 Task Model
As mentioned in (Carley and Gasser, 1999),
(Horling and Lesser, 2005) and (Dignum, Dignum,
and Sonenberg, 2004), a task is an activity that
should be performed by one or more agents to
achieve a goal or make a certain affect on the
environment.
We assume each task as a discrete event that may
occur with a given statistical distribution all around
the environment and in every point of time. Here we
suppose that the spatial and temporal distribution of
tasks’ occurrence is random.
A task is a tuple of two spatial attributes, which
describe the center of event occurrence, and a vector
of required capabilities and the minimal level of
each capability to be completed. The capabilities are
selected from a definite set in the system. We
assume that all these features are received by task
occurrence sensing agents.
Hence, if
n
cccC ,...,,
21
denotes all the n
capabilities available for agents, then
nn
vcvcvcyxT ,,...,,,,,,
2211
describes the
task occurring in a point with dimensions x and y,
requiring capabilities
n
ccc ,...,,
21
with at least
n
vvv ,...,,
21
necessary levels of each. Here, these
values come from a range between 0 and 100.
3.2 Agent Model
In this paper, we supposed that the agents are
homogeneous in potential capabilities, but different
in the power to use each capability. This power is
related to available resources for the agent. Besides,
we assumed agents in two roles: Supervision and
Operation. Hence, if we have an agent set
p
aaaA ,...,,
21
in the context (p is the number of
agents), each agent
Aa
i
may contain a tuple of
attributes as follows:
nn
vcvcvcyx ,,...,,,,,
2211
]100,0[,..1:
x
vnx
(1)
3.3 Structure Model
Organizational structure defines informational,
controlling, communicational patterns and features
of task environment (Kota et. al, 2009),
(Schwaninger, 2009). Our proposed organization is a
team-based organization whose initial structure
forms once the system begins to work and
reorganizes during the system operation, along with
occurrence of reorganization triggers. The
environment is a two dimensional grid space in
which a number of agents have been distributed
following a statistical distribution pattern. The
agents are distributed randomly or based on a given
map around the environment.
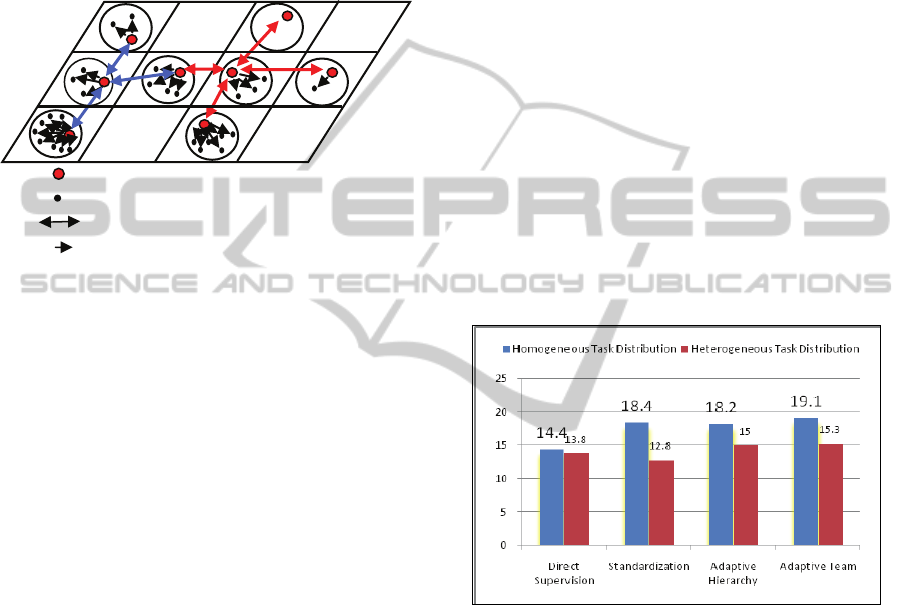
Figure 1 shows the proposed structure model. In
this model, the initial teams form based on the
location of each agent to minimize cost of initial
team formation. The context is partitioned to some
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
470
segments and all agents placed in each segment form
a team. The number of segments is varying as one of
the system parameters.
As mentioned in (Mintzberg, 1993), a supervisor
is required to manage each team. Here, the manager
of each team is the eldest agent among all team
members. Thus, it avoids any cost to system for this
task as well as the experience factor has been
implicitly regarded for selection of supervisor.
: Supervisor Agent
: Operator Agent
: Supervisors Communication
: Supervisor and Agent Communication
Figure 1: Organizational Structure.
3.4 Behaviour Model
Behavior model of proposed organization indicates
the way system transforms from one state to another
upon a given trigger. Occurrence of a new task
event, entrance of a new agent to the system, and
exit of the agent from the system form such triggers.
We use decentralized reorganization to coordinate
the MAS components.
It seems that coalition formation algorithm used
to select sub-teams and if needed, selection of
accommodator agents taking from adjacent teams,
are very significant in organization efficiency. In
this research, the simple greedy algorithm is used.
3.5 Activity Model
As Schwaninger (2009) defines, the activity model
describes the overall intended operations of or
actions taken by the organization. The emphasis of
change is on revising principles, goals and rules that
control and affect on the behavior of the
organization. Our proposed reorganization method
affects only on organizational structure.
We defined the utility as the rate of completed
tasks divided to the mean task accomplishment time.
Utility= TaskCompletionRate/MeanTaskCompletionTime
(2)
4 EXPERIMENTAL RESULTS
Our experiments consist of two parts. For first part,
we compare the impact of workload distribution in
team-based and hierarchical organizational models
using RoboCupRescue simulator.
In (Ghijsen et al., 2009), the performance of
organization is measured under two conditions. In
the first, civilians (tasks) are distributed randomly in
the environment to show a homogeneous task
distribution. In the second they are distributed as
clusters to form a heterogeneous workload. We run
some simulations on the Kobe map, creating 5
different homogeneous and 5 different
heterogeneous task distributions, as Ghijsen et al.
(2009) performed. Each distribution contains 9
agents (ambulances to rescue civilians) and 20 tasks
(civilians). Each simulation finishes after 300 time
steps. Figure 2 shows the results. Direct Supervision,
Standardization, and Adaptive hierarchy are three
coordination methods which are introduced,
implemented, and compared in (Ghijsen et al.,
2009).
Figure 2: Average number of tasks successfully performed
using four models (Performance).
As figure 2 shows, team-based method causes
better performance than hierarchical ones. It is
because of rapid initial team formation and proper
load distribution between agents as teams. In
homogeneous task distribution, this is done better
because the tasks are almost uniformly distributed
between agents. In heteregeneous distribution, the
tasks are distributed as clusters and the agents near
that clusters are mostly involved in task handling.
So, the team-based model doesn’t improve the
performance as in homogeneous one.
For second part, we compare the hierarchical
and team-based models against the rate of successful
task handling. For small numbers of agents, the
models are comparable and their effectiveness is in
A TEAM-BASED ORGANIZATIONAL MODEL FOR ADAPTIVE MULTI-AGENT SYSTEMS
471
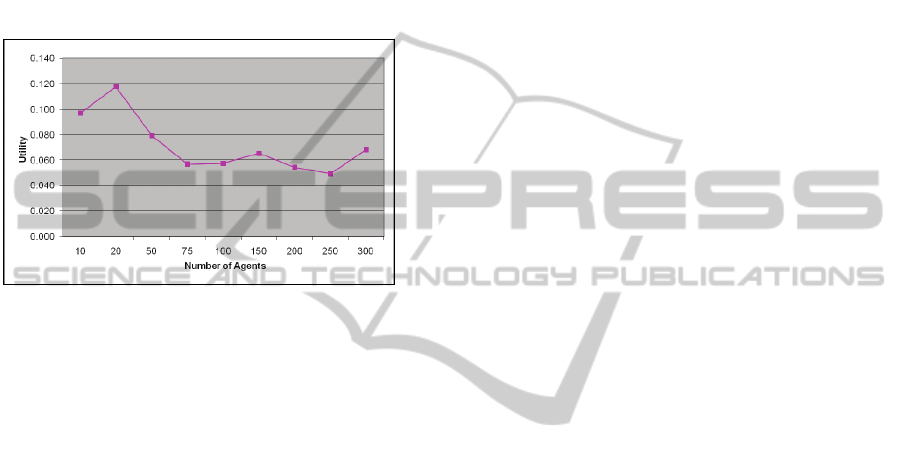
the same range. But for agents more than 50, the
team-based model had much better results. The
results show smooth changes in utility function
when increasing the problem size. It shows that the
proposed team-based model is scalable enough to be
used in medium-scaled multi-agent environments.
Figure 3 shows the changes of utility function
with increasing problem size. It seems that fast team
formation, proper load distribution between agents,
and team-based task handling cause the system to
perform effectively.
Figure 3: Utility of team-based model in different problem
sizes.
5 CONCLUSIONS
AND FUTURE WORK
In this paper, the problem of decentralized
adaptation is addressed and a team-based
organizational model is proposed based on
schwaninger’s model of intelligent organizations.
The main reason for this selection was the
importance of changeability for organizations acting
in open, dynamic and uncertain environments. The
agents are coordinated through reorganization via
fast coalition formation, and a greedy task allocation
method is used.
Experiments show the better effectiveness of
team-based model against the hierarchical one.
Adaptation via reorganization, fast initial team
formation, greedy capability-based coalition
formation, and using the nearest neighbors’
resources, improve utility.
Future work will involve proposing new
coalition formation algorithms and testing the effect
of task and environment factors on system
efficiency. We are going to develop a more effective
simulation environment to be able to support the
open, dynamic, and uncertain environment’s
properties. Varying agent capabilities, different
types of tasks, variable number of segments,
changeable agents’ sights, and controllable output
information are some features to be added to
developed tool as soon.
REFERENCES
Boella, G. and Van Der Torre, L. (2006). Coordination
and Organization: Definitions, Examples and Future
Research Directions. Electronic Notes in Theoretical
Computer Science, 3-20.
Carley, K. and Gasser, L.(1999). Computational
organization theory. In Weiss, G.(Ed.), Multi-Agent
Systems, A Modern Approach to Distributed Artificial
Intelligence (pp. 200-330): MIT-press.
DeLoach, S., and Matson. E. (2004). An Organizational
Model for Designing Adaptive Multiagent Systems. In
Proceedings of the Eighteenth National Conference
on Artificial Intelligence (AAAI-04). San Jose, CA.:
AAAI Press.
Dignum, V., Dignum, F., and Sonenberg L. (2004).
Towards dynamic reorganization of agent societies. In
Proceedings of Workshop on Coordination in
Emergent Agent Societies (pp. 22-27).
Ghijsen, M.; Jansweijer, W. N. H., and Wielinga. B. J.
(2009). Adaptive Hierarchical Multi-Agent
Organizations. In Babuska, R. and Groen,
F.C.A.(Eds.) Interactive Collaborative Information
Systems. in press.
Horling, B. and Lesser, V. (2005). A Survey of Multi-
Agent Organizational Paradigms. The Knowledge
Engineering Review, 19(4), 281-316.
Kirn, S. and Gasser, L. (1998). Organizational Approaches
to Coordination in Multi-Agent Systems, Technical
report, IImenau Technical University, Germany.
Kolp, M., Giorgini, P., and Mylopolos, J. (2006). Multi-
Agent Architectures as Organizational Structures.
Autonomous Agents and Multi-Agent Systems, 13(1),
3-25.
Kota, R., Gibbins, N., and Jennings, N. (2009).
Decentralized Structured Adaptation in Agent
Organizations. In: Organized Adaptation in Multi-
Agent Systems. Lecture Notes in Computer Science,
5368, 54-71.
Martin, C. and Barber, K. S. (2006). Adaptive Decision
Making Frameworks for Dynamic Multi-Agent
Organizational Change. Autonomous Agents and
Multiagent Systems, 13, 391-428.
Mintzberg, H. (1993). Structures in Five: Designing
Effective Organizations. Engelwood Cliffs,
N.J.:Prentice Hall.
Rosenfeld, A., Kaminka, G., Kraus, S., and Shehory, O.
(2008). A Study of Mechanisms for Improving
Robotic Group Performance. Artificial Intelligence,
172, 633-655.
Schwaninger, M. (2009). Intelligent Organizations:
Powerful Models for Systemic Management (2nd ed.):
Springer.
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
472
