
DYNAMIC LOW POWER RECONFIGURATIONS
OF REAL-TIME EMBEDDED SYSTEMS
∗
Xi Wang
1
, Mohamed Khalgui
1,2
1
School of Electro-Mechanical Engineering, Xidian University, Xi’an 710071, China
Zhiwu Li
1,2
2
Institute of Computer Science, Martin-Luther Universit
¨
at, 06120 Halle (Saale), Germany
Keywords:
Embedded system, Reconfiguration, Low power, Real-time scheduling, Agent-based architecture.
Abstract:
This paper deals with low power dynamic reconfigurations of real-time embedded systems. A reconfiguration
scenario means the addition, removal or update of tasks in order to save the whole system at the occurrence
of hardware/software faults, or also to improve its performance at run-time. When such a scenario is applied,
the energy consumption can be increased or some real-time constraints can be violated. An agent-based
architecture is defined where an intelligent software agent is proposed to check each dynamic reconfiguration
scenario and to suggest for users useful technical solutions that minimize the energy consumption. It proposes
first of all to modify periods, or to reduce execution times of tasks or finally to remove some of them. Users
should choose one of these solutions in order to guarantee a low power consumption satisfying limitations in
capacities of used batteries. We developed and tested a tool supporting all these services to be evaluated in the
research work.
1 INTRODUCTION
Nowadays, the minimization of the energy consump-
tion is an important criterion for the development of
real-time embedded systems due to limitations in the
capacity of their batteries, in addition to their tasks
which become more and more complex than ever.
Several interesting studies have been proposed in re-
cent years for their real-time and low power schedul-
ing (Shin and Choi, 1999; Quan and Hu, 2002; Yun
and Kim, 2003; Yao et al., 1995; Gaujal and Navet,
2007). We classically distinguish two reconfigura-
tion policies: static and dynamic reconfigurations.
Static reconfigurations are applied off-line to apply
changes before the system’s cold start (Angelov et al.,
2005), whereas dynamic reconfigurations are dynam-
ically applied at run-time. Two cases exist in the lat-
ter: manual reconfigurations applied by users (Rooker
et al.
, 2007) and automatic reconfigurations applied
by Intelligent Agents (Khalgui et al., 2010; Al-Safi
and Vyatkin, 2007). In this paper
2
, we assume em-
∗
Research Laboratory: http://sca.xidian.edu.cn
2
Detailed descriptions are available in our website:
http://sca.xidian.edu.cn/
∼
wangx/SCATR201012004.pdf.
bedded real-time systems based on CMOS processors
(Sarvar, 1997), such that the power consumption (P)
of a processor is assumed to be quadratically depen-
dent on supply voltage V
CC
. Similar to (Shin and
Choi, 1999) and (Yao et al., 1995), we assume that
the energy consumption is quadratically dependent on
the supply voltage V
CC
, and the processor speed can
be adjusted according to the processor utilization U.
This idea is interesting and will be used to allow low
power reconfigurations of embedded real-time sys-
tems to be implemented by sets of independent, pe-
riodic and synchronous tasks. To reach this goal, we
define an agent-based architecture in which an intel-
ligent software agent is proposed to check each dy-
namic (manual or automatic) reconfiguration scenario
at run-time, and to allow feasible and low power adap-
tive systems. The agent proposes first of all to modify
periods and deadlines of tasks in order to decrease the
processor speed. It suggests as a second solution to
modify execution times of tasks in order to decrease
the processor utilization. Finally it proposes for users
to remove some of them according to their static prior-
ities or also according to their processor utilizations.
The next section analyzes previous work on low
415
Wang X., Khalgui M. and Li Z. (2011).
DYNAMIC LOW POWER RECONFIGURATIONS OF REAL-TIME EMBEDDED SYSTEMS.
In Proceedings of the 1st International Conference on Pervasive and Embedded Computing and Communication Systems, pages 415-420
DOI: 10.5220/0003308304150420
Copyright
c
SciTePress

power and real-time scheduling as well as reconfigu-
rations of embedded architectures. Section 3 formal-
izes reconfigurable real-time systems and their power
consumptions. In Section 4, we define an agent-based
architecture for the minimization of the energy con-
sumption. This architecture is implemented, simu-
lated and analyzed in Section 5. Section 6 concludes
this work.
2 STATE OF THE ART
Although these rich and useful contributions of (Shin
and Choi, 1999; Quan and Hu, 2002; Yun and Kim,
2003; Yao et al., 1995; Gaujal and Navet, 2007)
provide interesting results, they do not address dy-
namic reconfigurations with low power consump-
tions of embedded systems such that real-time so-
lutions are automatically computed for users when
the system’s behavior is dynamically reconfigured.
Real-time scheduling has been extensively studied in
the last three decades (Baruah and Goossens, 2004)
where several Feasibility Conditions (FC) for the di-
mensioning of a real-time system are defined to en-
able a designer to grant that timeliness constraints
associated with an application are always met for
all possible configurations. Among all scheduling
policies, Earliest Deadline First (EDF) is an optimal
uniprocessor scheduling algorithm in the following
sense: if a collection of independent periodic jobs
characterized by arrival times equal to zero and by
deadlines equal to corresponding periods are feasi-
ble with another scheduling policy, then it is feasi-
ble with EDF. Nowadays, several research works have
been proposed to develop reconfigurable embedded
systems. The work in (Angelov et al., 2005) proposes
reusable tasks to implement a broad range of sys-
tems where each task is statically reconfigured with-
out any re-programming. Rooker et al. propose in
(Rooker et al., 2007) a complete methodology based
on the human intervention to dynamically reconfig-
ure tasks. The research in (Brennan et al., 2001)
proposes an agent-based reconfiguration approach to
save the whole system when faults occur at run-time.
In (Al-Safi and Vyatkin, 2007), an ontology-based
agent is proposed to perform system’s reconfigura-
tions that adapt changes in requirements and also in
environment. As far as the authors know, no work
is reported to address the problem of dynamic re-
configurations of embedded systems under real-time
and low-power constraints. Our current research ad-
dresses low-power reconfigurations of real-time em-
bedded systems when additions-removals-updates of
tasks are dynamically applied at run-time to save the
system or improve its performance.
3 FORMALIZATION
OF RECONFIGURABLE
REAL-TIME SYSTEMS
A reconfiguration scenario is assumed in this paper to
be an operation allowing the addition-removal-update
of tasks from/into the system. Each scenario should
be applied while reducing the energy consumption
which is a very important criterion. We define a
real-time embedded system Sys as a set of tasks that
should meet real-time constraints defined in user re-
quirements: Sys = {τ
1
,τ
2
,. .. ,τ
n
}. When a reconfig-
uration scenario is applied, a subset of tasks can be
added/removed into/from the system. Each task τ
i
of
Sys describes: i) a function F
i
defining its function,
ii) the static priority S
i
among all the system’s (new
and old) tasks, iii) the release time R
i
defining the ex-
ecution start time of the task, iv) the WCET C
i
, v) the
period T
i
, and vi) the deadline D
i
. It is assumed in
addition that a) all the system’s tasks are periodic and
synchronous, and b) the period of each task is equal
to the corresponding deadline. The system Sys is dy-
namically reconfigured at run-time such that its new
implementation is Sys = {τ
1
,τ
2
,. .. ,τ
n
,τ
n+1
,. .. ,τ
m
}.
The subset {τ
n+1
,. .. ,τ
m
} is added to the initial im-
plementation {τ
1
,τ
2
,. .. ,τ
n
}. The processor utiliza-
tion before and after the reconfiguration scenario is as
follows:
U
be f
=
n
∑
i=1
C
i
T
i
(1)
U
a f t
=
m
∑
i=1
C
i
T
i
(2)
The energy consumption is assumed quadratically
dependent on processor utilization U (Wang et al.,
2004), the equation can be described as:
P = kU
2
(3)
Proposition 1. Let U
a f t
and U
be f
denote the proces-
sor utilization after and before a reconfiguration sce-
nario is applied, respectively. If U
a f t
≤ U
be f
, then the
processor speed after the reconfiguration scenario is
not greater than that before. In this case the power
consumption is stable or minimized.
Proof : Due to Eq. (3), the energy consumption is
quadratically dependent on U . If U
a f t
≤ U
be f
, substi-
tuting it into Eq. (3) leads to P
a f t
= kU
2
a f t
≤ kU
2
be f
=
P
be f
. Then the power will be stable or minimized. ⋄
PECCS 2011 - International Conference on Pervasive and Embedded Computing and Communication Systems
416

4 AGENT-BASED
ARCHITECTURE FOR LOW
POWER RECONFIGURATIONS
OF EMBEDDED SYSTEMS
We define an agent-based architecture for dynamic
low-power reconfigurations of an embedded real-time
system. When automatic or manual reconfigurations
are applied at run-time to add, remove or update tasks,
the agent should check if the power consumption is
increased. If a reconfiguration scenario is dynami-
cally applied at run-time to add new tasks, the pro-
cessor utilization U
rec
of the system will be certainly
increased as follow:
U
rec
=
m
∑
i=1
C
i
T
i
(4)
4.1 Modification of Periods and
Deadlines
The agent proposes as a first technical solution to
modify the periods and deadlines of tasks in order
to decrease the processor utilization U
a f t
to be lower
than U
be f
. For the reconfigured system, it is assumed
that T
′
1
, T
′
2
, . .., and T
′
m
are the modified periods of m
tasks, and T
′
1
= T
′
2
= ... = T
′
m
= T
′
.
In order to minimize the energy consumption,
based on Eq. (3), the processor utilization should be
reduced. Proposition 1 leads to:
U
a f t
=
m
∑
i=1
C
i
T
′
≤ U
be f
(5)
where
T
′
= ⌈
m
∑
i=1
C
i
U
be f
⌉ (6)
In Eq. (6), T
′
is the modified period of each task.
The processor utilization after reconfiguration of the
processor is as follows:
U
a f t
=
m
∑
i=1
C
i
T
′
(7)
4.2 Modification of WCETs
For the low-power reconfiguration of embedded sys-
tems, the agent proposes as a second technical solu-
tion to reduce the WCETs of tasks in order to decrease
the processor utilization U
a f t
.
U
a f t
=
m
∑
i=1
C
′
i
T
i
(8)
where C
′
1
, C
′
2
, .. ., and C
′
m
are the new WCETs of
tasks. Suppose that C
′
1
= C
′
2
= · · · = C
′
m
= C
′
, Similar
to Eq.(5), we can get:
U
a f t
=
m
∑
i=1
C
′
T
i
≤ U
be f
(9)
C
′
can be solved as:
C
′
= ⌊
U
be f
m
∑
i=1
1
T
i
⌋ (10)
The actual utilization of the processor is as fol-
lows:
U
a f t
= C
′
×
m
∑
i=1
1
T
i
(11)
4.3 Removal of Tasks
The third solution proposed by the agent allows the
removal of tasks in order to minimize the energy con-
sumption after any reconfiguration scenario of an em-
bedded system. Two policies are proposed: the agent
suggests to remove tasks according to their functional
priorities or to their processor utilization.
4.3.1 First Policy: Static Priority Criterion
By defining for each task τ
i
a static priority S
i
, the
agent suggests to remove tasks with lower static pri-
orities because their removal can be useful for a low
power reconfiguration of the system. Let List be the
list of tasks of S ys in descending order of static prior-
ities. The most unimportant tasks should be removed
to keep the new utilization of the system U
a f t
lower
than U
be f
. Specifically, we have
U
a f t
=
k
∑
F
i
=1
C
i
T
i
≤ U
be f
(12)
where m − k is the number of removed tasks with k ≤
m. The agent should look for the highest value of U
a f t
such that U
a f t
≤ U
be f
. The total energy consumption
can be calculated by Eq. (3).
4.3.2 Second Policy: Processor Utilization
Criterion
It is similar to the first policy. Their difference is that
the second policy does not to arrange tasks due to their
static priorities, but due to their processor utilization.
In this case, the List is the list of tasks of Sys in as-
cending order of processor utilization of each task τ
i
.
If the system is not feasible or consumes more energy,
the tasks with highest processor utilizations should be
DYNAMIC LOW POWER RECONFIGURATIONS OF REAL-TIME EMBEDDED SYSTEMS
417

removed to keep as many tasks as possible remaining
in the system.
5 EXPERIMENTAL STUDIES
This section presents an experimental study applying
low power reconfigurations of embedded real-time
systems. We present first of all the implementation
of the agent-based architecture, before showing the
simulations and analysis that are made to evaluate the
benefits of our contributions.
5.1 Implementation of the
Reconfiguration Agent
In this paper, the agent’s goal is to check dynamic
(automatic or manual) reconfiguration scenarios, and
suggest useful solutions for the minimization of the
energy consumption. Each solution is generated as an
input file from the agent to the well-known simulator
Cheddar (Singhoff et al., 2004) to check its feasibility.
This implementation is tested in our research labora-
tory at Xidian University by assuming several cases of
systems. Note that Eqs. (1), (3), (6), and (10) can be
used to calculate U
be f
, P
be f
, T
′
, and C
′
, respectively.
According to Eqs. (4) and (11), the utilization U
1
a f t
is
computed after the modification of periods (and dead-
lines), and the utilization U
2
a f t
after the modification
of WCETs, respectively. Note in addition that U
3
a f t
and U
4
a f t
correspond to the utilization after tasks are
removed according the two fixed policies, as shown in
Eq. (12). We use P
1
a f t
, P
2
a f t
, P
3
a f t
, and P
4
a f t
to indicate
the power consumption after the modification of peri-
ods (and deadlines), after the modification of WCET,
after the removal of tasks by considering their static
priorities, and after the removal of tasks by consider-
ing their utilizations, respectively. All of them can be
calculated by Eq. (3).
In the first two technical solutions, the algorithm’s
complexity is O(n), and in the third one, it costs
O(n
2
).
5.2 Simulations
This section presents simulation results by applying
low-power reconfigurations of an embedded real-time
system that is initially composed of 50 tasks and dy-
namically reconfigured at run-time to add 30 new
ones. We assume the following temporal character-
istics of the system under consideration:
• Initial System’s Tasks & Addition Tasks. All
the initial tasks of the system and the addition
Algorithm 1: Low-Power Reconfigurations.
input “system.txt” file;
input “add.txt” file;
input “priority.txt” file;
compute (U
be f
);
calculate period T
′
;
for (i = 1, i = size(sys) + size(add),i + +)
U
i
= C
i
/T
′
;
∑
U
1
a f t
+ = U
i
;
endfor;
Evaluate energy(U
be f
, U
1
a f t
);
calculate execution time C
′
;
for (i = 1, i = size(sys) + size(add),i + +)
U
i
= C
′
/T
i
;
∑
U
2
a f t
+ = U
i
;
endfor;
Evaluate energy(U
be f
, U
2
a f t
);
Sort all the tasks by a descending order based on their
static priorities;
Loop1 remove tasks priority (Sys
new1
);
for (i = 1, i = size(Sys
new1
),i + +)
∑
U
3
a f t
+ = U
i
;
endfor;
keep minimal(U
3
min a f t
);
EndLoop1
Evaluate energy(U
be f
, U
3
min a f t
);
sort all the tasks by a ascending order based on their
utilization;
Loop2 remove tasks utilization(Sys
new2
);//solution 3
to remove possible tasks (second criterion)
for (i = 1,i = size(Sys
new2
),i + +)//to compute the
new utilization when tasks are removed (second cri-
terion)
∑
U
4
a f t
+ = U
i
;
endfor;
keep minimal(U
4
min a f t
);
Evaluate energy(U
be f
, U
4
min a f t
);
EndLoop2
end;
tasks are in the file “system.txt” and “add.txt”, re-
spectively. (F
i
defines the function. R
i
, C
i
, T
i
, and
D
i
define the temporal parameters of each task.
• Static Priorities. All the functional priorities of
the system’s tasks are defined in the file prior-
ity.txt (F
i
and S
i
define functional and static pri-
orities of each task, respectively.
All the related files and experimental data are
shown in the technical report of our laboratory(Wang
et al., 2004).
PECCS 2011 - International Conference on Pervasive and Embedded Computing and Communication Systems
418
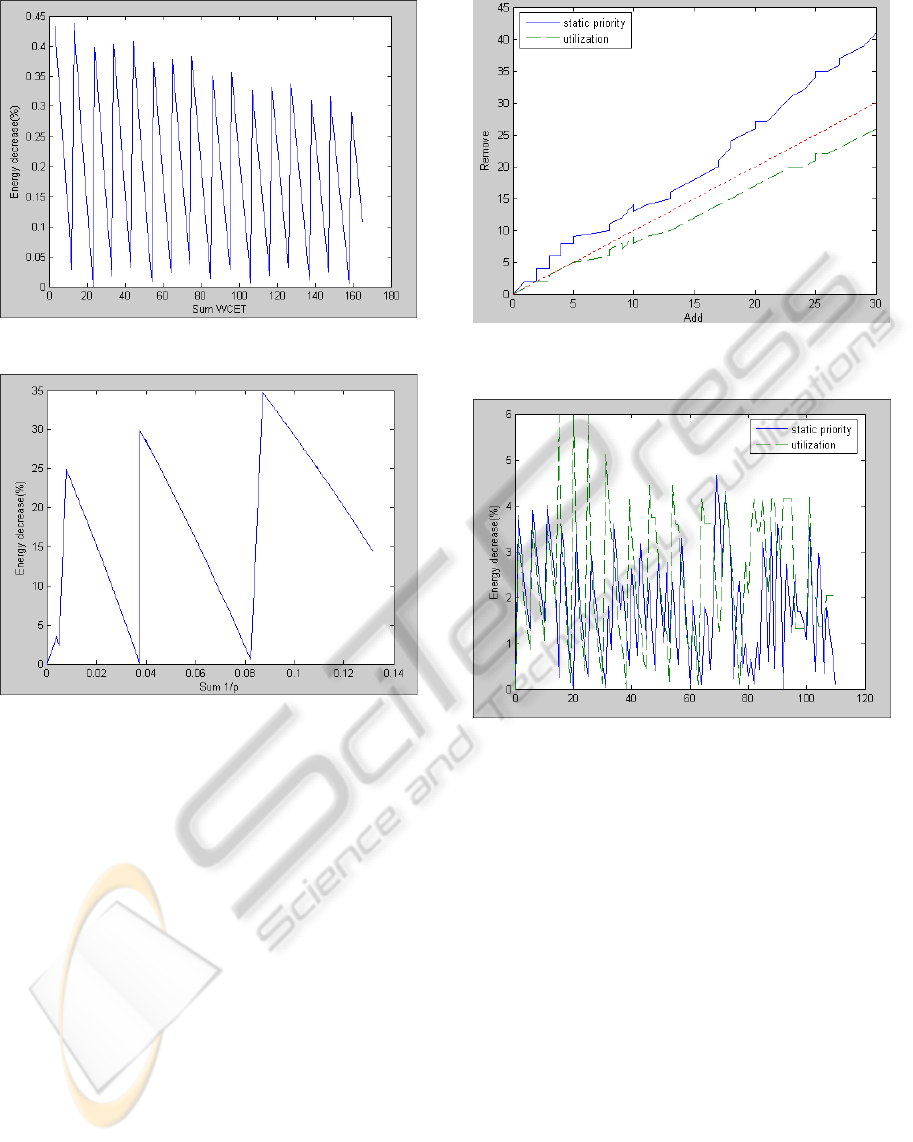
Figure 1: Energy decrease by modify periods.
Figure 2: Energy decrease by modify WCETs.
5.3 Analysis
We present some analysis that proves the advantages
of the different proposed solutions.
5.3.1 First Solution
Due to Eqs. (6) and (3), the power minimization is
proven to be dependent on the WCETs. If all the 30
tasks are added, their WCETs are equal to 165. We
made several simulations for
∑
C
i
= 3,4,5,...,165.
The result is shown in Fig. 1 in which we find a de-
crease of consumption between 0 and 0.45%. The en-
ergy reduction is piecewise approximately linear de-
pending on the
∑
C
i
= 3,4,5,...,165.
5.3.2 Second Solution
From Eqs. (10) and (3), the power minimization is
proven to be dependent on periods. If all the 30 tasks
are added, the value of
30
∑
i=1
1/T
i
is equal to 0.131684.
Figure 3: Comparing the number of removed task between
two remove strategies.
Figure 4: Comparing energy decrease between two remove
strategies.
Simulations are made for subsets of tasks with the
range of
∑
1/T
i
between 0 and 0.131684. The result is
shown in Fig. 2 where the minimization of the energy
consumption is between 0 and 35%. This simulation
result proves the benefits of the second solution than
the first. Nevertheless, sometimes, the modification of
periods is more simpler that minimization of WCET.
It is unclear whether the second solution is definitely
better than the first.
5.3.3 Third Solution
In the third solution where tasks are removed at run-
time to minimize the energy consumption after recon-
figuration scenarios, several simulations are applied
to evaluate the benefits. In Fig. 3, the continuous line
presents the first policy where the priority function is
used as a criterion to remove tasks. In this case, the
number of removed tasks is equal to or greater than
the added one: the tasks remaining in the system are
DYNAMIC LOW POWER RECONFIGURATIONS OF REAL-TIME EMBEDDED SYSTEMS
419

less than 50. The dotted line corresponds to the re-
moval of tasks due to their processor utilizations. The
number of removed tasks is smaller than the addition
number. This second policy is more useful than the
first. Fig. 4 shows the minimization of the energy
consumption when the first (continuous line) and the
second (dotted line) policies are applied. It indicates
that the energy consumption stills minimal when we
apply the second solution where WCETs of tasks are
modified.
6 CONCLUSIONS
This paper deals with low power and real-time dy-
namic reconfigurations of embedded systems to be
implemented by sets of tasks that should meet real-
time constraints while satisfying limitations in the ca-
pacity of batteries. A reconfiguration scenario means
the addition, removal or update of tasks in order to
save the system when faults occur or to improve its
performance. The energy consumption can often be
increased or real-time constraints can often be vio-
lated when tasks are added. To allow a stable energy
consumption before and after the application of each
reconfiguration scenario, an agent-based architecture
is defined where an intelligent software agent is pro-
posed to check each dynamic reconfiguration scenario
and to suggest for users effective solutions in order
to minimize the energy consumption. It proposes to
modify periods, reduce execution times of tasks or re-
move some of them. A tool is developed and tested to
support all these services. In our future work, we plan
to study low power and real-time reconfigurations of
asynchronous tasks that can be loaded in a uniproces-
sor or can be distributed on different calculators.
ACKNOWLEDGEMENTS
This work was supported in part by the Natural Sci-
ence Foundation of China under Grant No. 60773001
and 61074305, the Fundamental Research Funds for
the Central Universities under Grant No. 72103326,
the National Research Foundation for the Doctoral
Program of Higher Education, the Ministry of Educa-
tion, P. R. China, under Grant No. 20090203110009,
“863” High-tech Research and Development Program
of China under Grant No. 2008AA04Z109, the Re-
search Fellowship for International Young Scientists,
National Natural Science Foundation of China, and
Alexander von Humboldt Foundation.
REFERENCES
Al-Safi, Y. and Vyatkin, V. (2007). An ontology-based
reconfiguration agent for intelligent mechatronic sys-
tems. In Third International Conference on Indus-
trial Applications of Holonic and Multi-Agent Sys-
tems. Springer-Verlag.
Angelov, C. Sierszecki, K. and Marian, N. (2005). De-
sign models for reusable and reconfigurable state ma-
chines. In L.T. Yang, et al. (Eds.), EUC, LNCS, 3824.
International Federation for Information Processing.
Baruah, S. and Goossens, J. (2004). Scheduling real-time
tasks: Algorithms and complexity. In In Handbook
of Scheduling: Algorithms, Models, and Performance
Analysis. Chapman Hall/ CRC Press.
Brennan, R. W. Fletcher, M. and D. H. Norrie, (2001). A
holonic approach to reconfiguring realtime distributed
control systems. In Multi-Agent Systems and Applica-
tions. Springer-Verlag.
Gaujal, B. and Navet, N. (2007). Dynamic voltage scaling
under edf revisited, real-time systems. In Some re-
sults are available as research report INRIA RR-5125.
Springer Verlag.
Khalgui, M. Mosbahi, O. Li, Z. W. and Hanisch, H.-M.
(2010). Reconfigurable multi-agent embedded con-
trol systems: From modelling to implementation. In
IEEE Transactions on Computers.
Quan, G. and Hu, X. (2002). Minimum energy fixed-
priority scheduling for variable voltage processors,
design, automation and test. In Europe Conference
and Exhibition.
Rooker, M. N. Sunder, C. et al. (2007). Zero downtime
reconfiguration of distributed automation systems: the
ε cedac approach. In Third International Conference
on Industrial Applications of Holonic and Multi-Agent
Systems. Springer-Verlag.
Sarvar, A. (1997). CMOS power consumption and C
pd
cal-
culation. Texas Insruments.
Shin, Y. and Choi, K. (1999). Power conscious fixed priority
scheduling for hard real-time systems. In 36th Design
Automation Conference.
Singhoff, F. Legrand, J. Nana, L. and Marce, L. (2004).
Cheddar: A flexible real time scheduling framework.
In Atlanta, GA, United states, Association for Com-
puting Machinery.
Wang, X. Khalgui, M. and Li, Z. W. (2004). Dynamic low
power reconfigurations of embedded real-time sys-
tems. In Technical Report TR-201012004. Available:
http://sca.xidian.edu.cn/
∼
wangx/SCATR201012004.pdf.
Yao, F. Demers, A. and Shenker, S. (1995). A scheduling
model for reduced cpu energy. In Proceedings of IEEE
annual foundations of computer science.
Yun, H. and Kim, J. (2003). On energy-optimal voltage
scheduling for fixed-priority hard real-time systems.
In ACM Transactions on Embedded Computing Sys-
tems(TECS).
PECCS 2011 - International Conference on Pervasive and Embedded Computing and Communication Systems
420
