
FAST DEPTH-INTEGRATED 3D MOTION ESTIMATION AND
VISUALIZATION FOR AN ACTIVE VISION SYSTEM
M. Salah E.-N. Shafik and B¨arbel Mertsching
GET Lab, University of Paderborn, Pohlweg 47-49, 33098 Paderborn, Germany
Keywords:
3D Motion parameters estimation, 3D Motion segmentation, Depth from stereo, Active and robot vision.
Abstract:
In this paper, we present a fast 3D motion parameter estimation approach integrating the depth information
acquired by a stereo camera head mounted on a mobile robot. Afterwards, the resulting 3D motion parameters
are used to generate and accurately position motion vectors of the generated depth sequence in the 3D space
using the geometrical information of the stereo camera head. The proposed approach has successfully detected
and estimated predefined motion patterns such as motion in the Z direction and motion vectors pointing to the
robot which is very important to overcome typical problems in autonomous mobile robotic vision such as
collision detection and inhibition of the ego-motion defects of a moving camera head. The output of the
algorithm is part of a multi-object segmentation approach implemented in an active vision system.
1 INTRODUCTION
3D motion interpretation has evolved into one of the
most challenging problems in computer vision. The
process of detecting moving objects as well as the es-
timation of their motion parameters provides a signif-
icant source of information to better understand dy-
namic scenes. The motion in computer vision is re-
lated to the change of the spatio-temporal informa-
tion of pixels. Computing a single 3D motion from a
2D image flow by finding the optimal coefficient val-
ues in a 2D signal transform suffers from ambiguous
interpretations concerning 3D motion especially mo-
tions in the Z direction. On the other hand, one of
the main challenges facing the segmentation of 3D
multi-moving objects in an active vision system is
the segmentation of an incoherent MVF into parti-
tions in reasonable computation time. This especially
proved to be difficult when moving objects are par-
tially visible and not connected. Hence, it is impor-
tant to detect, estimate, and segment the MVF inde-
pendently from a predefined spatial coherence such as
object contours generated from image segmentation
approaches. Such methods are dependent on a group
of features which could be affected by the continu-
ous environment change in a dynamic scene, e.g., the
results of the color-based segmentation approaches
could be affected by illumination changes.
Yet, some of these 3D motion estimation and seg-
mentation approaches require a pre-defined 3D model
before the surface projection model or prior segmen-
tation information (Schmudderichet al., 2008), which
is considered a vital drawback in the autonomous
robotic field where unpredicted scenarios and model
geometry may exist. Moreover, they did not address
the multi-moving non-rigid objects problem where
several objects could be occluded in different depth
levels (Kim et al., 2010). Furthermore, integrating the
depth information provides accurate estimation for
motion in the z direction even for a static vision sys-
tem which is not applicable to monocular systems (Li
et al., 2008; Ribnick et al., 2009). Another aspect that
should be taken into consideration is the computation
speed as active vision applications require fast algo-
rithms to act realistic in such a dynamic environment.
In this paper, a new algorithm is proposed to en-
hance the computational speed of the motion segmen-
tation approach presented in (Shafik and Mertsching,
2008) by integrating the depth information in the 3D
motion parameters estimation process. Hence, the
search space has been reduced to be five dimensions
which represent the rotation around the x, y, and z axes
and translation in the direction of the x− and y−axis.
The geometrical information of the mobile robot and
the mounted stereo camera head has been taken into
consideration in order to accurately position the mo-
tion vectors in the 3D spatial domain. The resulting
3D MVF provide the ability to detect and estimate
any predefined motion patterns which is vital for pre-
dicting any possible collision not only with the robot
97
Salah E.-N. Shafik M. and Mertsching B..
FAST DEPTH-INTEGRATED 3D MOTION ESTIMATION AND VISUALIZATION FOR AN ACTIVE VISION SYSTEM.
DOI: 10.5220/0003315100970103
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2011), pages 97-103
ISBN: 978-989-8425-47-8
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

but with any objects in the observed 3D environment.
The disparity map is generated using a segment-
based scan line stereo algorithm presented in (Shafik
and Mertsching, 2009) which is fast and independent
of the GPU power (needed for other applications).
The research presented in this paper is intended to
be included in active vision applications (Ali and
Mertsching, 2009; Aziz and Mertsching, 2009). In
order to analyze those applications in a scalable com-
plex scene, a virtual environment for simulating a mo-
bile robot platform (SIMORE) is used (Kotth¨auser
and Mertsching, 2010).
The remainder of the paper is organized as fol-
lows: section 2 gives an account of the related work
to the proposed method, while section 3 describing in
details the proposed algorithm. Section 4 discusses
the results of experiments and evaluates the outcome
of the proposed method, and finally, section 5 con-
cludes the paper.
2 RELATED WORK
In (Massad et al., 2002; Shafik and Mertsching,
2007), a 3D motion segmentation approach is con-
ceptually able to handle transparent motion which de-
scribes the perception of more than one velocity field
in the same local region of an image despite the pixel-
connectivity of objects where motion parameters are
used as a homogeneity criterion for the segmentation
process.Other approaches in this context assume that
each segment represents a rigid and connected object
such as (Gruber and Weiss, 2007) where 2D non-
motion affinity cues are incorporated into 3D mo-
tion segmentation using the Expectation Maximiza-
tion (EM) algorithm. In the Expectation step, the
mean and covariance of the 3D motions are calculated
using matrix operations, and in the Maximization step
the structure and the segmentation are calculated by
performing energy minimization. In (Sotelo et al.,
2007) the ego-motion problem has been handled us-
ing a stereo vision system where feature points (basi-
cally road lane markings) are matched between pairs
of frames and linked into 3D trajectories. However,
the estimated parameter is only the vehicle velocity.
Recently, many works have concentrated on the study
of the geometry of dynamic scenes by modeling dy-
namic 3D real world objects (Rosenhahn et al., 2007;
Yang and Wang, 2009) where the projected surface of
a 3D object model and the data of a previously esti-
mated 3D pose are used to generate a shape prior to
the segmentation process. The goal of 2D-3D pose es-
timation is to estimate a rigid motion which fits a 3D
object model to 2D image data. Choosing which fea-
tures are used for the object model is veryimportant to
determine the 3D pose by fitting the selected feature
to corresponding features in an image. In this case,
the feature is the object surface with the object silhou-
ette which implements 2D non-motion affinity cues
generated from object segmentation. (Hasler et al.,
2009) suggested a texture model based method for
3D pose estimation. Contour and local descriptors
are used for matching, where the influence of the fea-
tures is automatically adapted during tracking. This
approach has shown its ability to deal with a rich tex-
tured and non-static background as it has shown ro-
bustness to shadows, occlusions, and noise in gen-
eral situations overcomingthe drawbacksof the single
features. However, the use of several cameras from
different angles is necessary for the estimation of 3D
object positions which is not the case for a single mo-
bile robot. Another application for motion segmenta-
tion and 3D modeling (Yamasaki and Aizawa, 2007)
for consecutive sequences of 3D models (frames) rep-
resented as a 3D polygon mesh has conducted the mo-
tion segmentation by analyzing the degree of motion
using extracted feature vectors, while each frame con-
tains three types of data such as coordinates of ver-
tices, connection, and color.
On the other hand, using the spatial coherence
as in (Pundlik and Birchfield, 2006; Taylor et al.,
2010) requires prior information of the object geome-
try. Such information is mainly based on a predefined
assumption of spatial constraints or detecting certain
groups of feature points which in the case of our au-
tonomous system are not available. In addition, im-
plementing such constraints leads to image segmenta-
tion rather than segmenting the generated MVF based
on its motion parameters.
3 PROPOSED ALGORITHM
In this part, the functionality of the proposed algo-
rithm will be described. In a neural system for in-
terpreting optical flow (Tsao et al., 1991), the com-
putation of a 3D motion from a 2D image flow or a
motion template finds the optimal coefficient values
in a 2D signal transform. The ideal optical motion
υ
opt
caused by motion of a point (x, y, d) on a visible
surface d = ρ(x, y), is
υ
opt
(x, y) =
6
∑
i=1
c
i
e
i
(x, y) (1)
where e
i
(x, y) represents the six infinitesimal genera-
tors in form of a 2D vector field.
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
98
e
1
(x, y) =
ρ
−1
(x, y)
p
1+ x
2
+ y
2
0
e
2
(x, y) =
0
ρ
−1
(x, y)
p
1+ x
2
+ y
2
e
3
(x, y) =
−xρ
−1
(x, y)
p
1+ x
2
+ y
2
−yρ
−1
(x, y)
p
1+ x
2
+ y
2
(2)
and for rotation :
e
4
(x, y) =
−xy
1+ y
2
e
5
(x, y) =
1+ x
2
xy
e
6
(x, y) =
−y
x
(3)
Integrating the depth information into the 3D mo-
tion parameters estimation process reduces the search
space to 5D where the parameter coefficient of the
translation in z direction c
3
will equal the depth dif-
ference between two consecutive disparity maps:
c
i
3
= d
t+1
i
− d
t
i
(4)
where d
t
i
is the depth of point P
i
(x, y, t) and d
t+1
i
is
the depth of its correspondence point P
i
(x + δx, y +
δy, t + 1) determined by the motion vector V f(i)
generated using a fast variational optical flow ap-
proach (Bruhn et al., 2005). Before the estimation
approach starts, a noise reduction process is applied
to the input MVF in order to limit the estimation pro-
cess to the valid vectors only. Then, a motion seg-
ments class is initialized where every segment con-
tains the motion parameters information c(ξ
i
) of the
attached motion. The segmentation process considers
the whole MVF representing one motion at the first
iteration.
A validation process is applied to each unpro-
cessed vector υ
ε=0
k
, ε ∈ {1, 0} in order to detect
whether it belongs to the same motion or not by mea-
suring the vector difference ϑf
k
between the esti-
mated vector and the actual input vector.
ϑf
k
(p
m
) = υ
ε=0
k
− υ
inp
(p
m
)
υ
ε=0
k
∈ ξ
i
if ϑf
k
(p
m
) < τ
ϑ
f
min
(5)
where τ
ϑ
f
min
is the minimum threshold that a vec-
tor difference should pass in order to consider an es-
timated vector υ
ε=0
k
belonging to the current motion
segment ξ
i
generated by the motion parameters c(ξ
i
)
For an image point p
m
, the update process starts
by estimating the motion parameters c(p
m
) using the
following error function
(a) (b)
(c) (d)
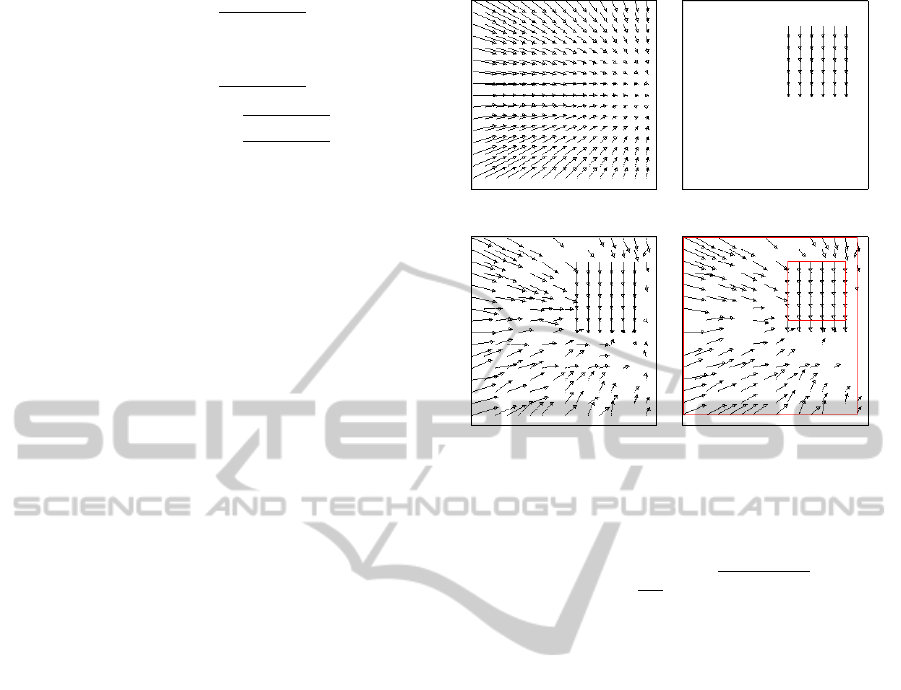
Figure 1: Segmentation of two different synthetic motions:
(a) first motion, (b) second motion, (c) noisy MVF consists
of the two previous motions, (d) result of the motion seg-
mentation approach.
E
k
(c(p
m
)) =
1
|V|
∑
p∈V
q
(ϑf
k
(p
m
))
2
(6)
The estimation process is re-applied after the ex-
clusion of vectors that do not belong to the same mo-
tion. Fig. 1 demonstrates the result of motion segmen-
tation of two different synthetic motions.
3.1 3D Representation of Motion
Parameters
The visualization difference between a projected 3D
point into a 2D plane using the equations proposed
in (Tsao et al., 1991) and the 3D homogeneous trans-
formation matrix resulting from multiplying the cur-
rent 3D spatial position and the perspective matrix
must be taken into consideration. Hence, in order to
represent a similar visualization of the projected 3D
point in the real 3D spatial domain using the OpenGL
libraries, transformation functions have to be applied
to estimate the OpenGL transformation matrix coef-
ficients (t
x
,t
y
,t
z
for translation motion and θ
x
, θ
y
, θ
z
for rotation motion) from the pre-estimated 3D mo-
tion parameter coefficients of the projected motion c
i
(eq. no. 1). The projective transformation requires an
external calibration of the camera geometry to obtain
the scale information (Ribnick et al., 2009).
The translation in the x and y direction will be
equal to the pre-estimated 3D motion parameters
c
1
, c
2
, while the translation in the z direction and the
FAST DEPTH-INTEGRATED 3D MOTION ESTIMATION AND VISUALIZATION FOR AN ACTIVE VISION
SYSTEM
99

rotation motions involve the perspective information
of the OpenGL Frustum function. In OpenGL, a 3D
point in eye space is projected onto the near plane
(projection plane) using the following transformation
matrix:
x
y
z
w
=
2n
r− l
0
r+ l
r− l
0
0
2n
t − b
t + b
t − b
0
0 0
− f + n
f − n
−2fn
f − n
0 0 −1 0
x
e
y
e
z
e
w
e
(7)
Hence the translation in z direction t
z
will be
t
z
= −
x
e
n
x
e
− c
3
x
s
k
(8)
where x
s
∈ [−1, 1] is the normalized value of the
x
e
location on the near plane, k is a scaling factor.
In order to estimate the rotation parameters such
as the rotation about the z axis θ
z
, the following trans-
formation matrix has to be used:
x
′
y
′
z
′
w
=
cosθ
z
−sinθ
z
0 0
sinθ
z
cosθ
z
0 0
0 0 1 0
0 0 0 1
x
e
y
e
z
e
1
(9)
the value of x derived from eq. no. 3 will be used.
e
6
(x, y) =
−y
x
y = y
s
k
x = x
e
− c
6
y
s
k
(10)
from eq. no. 7 and 9:
x =
−nx
′
z
′
=
−n(x
e
cosθ
z
− y
e
sinθ
e
)
z
e
(11)
from eq. no. 10 and 11 :
θ
z
= sin
−1
(x
e
− c
6
.y
s
.k).
−z
e
n
p
x
2
e
+ y
2
e
− tan
−1
x
e
−y
e
(12)
Fig. 2 demonstrates the rotation around the z axis
using the rotation parameter coefficient c
6
from (eq.
no. 3) and the transformed rotation parameter θ
z
from
(eq. no. 12).
The same procedure is applied for the estimation
of the rotation parameters θ
x
and θ
y
:
(a) (b)
Figure 2: Rotation around z axis. (a) using the rotation
parameter coefficient c
6
, (b) perspective view of the trans-
formed rotation parameter θ
z
using OpenGL.
θ
x
= tan
−1
−y
e
(n+ z
e
) − z
e
c
4
y
2
s
k
y
e
(y
e
+ c
4
y
2
s
k) − nz
e
(13)
θ
y
= tan
−1
x
e
(n+ z
e
) + z
e
c
5
x
2
s
k
x
e
(x
e
+ c
5
x
2
s
k) − nz
e
(14)
3.2 3D Representation of Motion
Vectors
In order to estimate the metric values of the dispar-
ity maps, the distance between the stereo cameras b
and the focal length f has to be known. Stereo algo-
rithms search only a window of disparities where the
range of determined objects is restricted to some in-
terval called the Horopter. The search window can
be moved to an offset by shifting the stereo images
along the baseline and must be large enough to en-
compass the ranges of objects in the scene. Hence,
the determined depth value d will be:
d =
b. f
x
r
− x
l
(15)
where x
r
− x
l
is the disparity value.
The representation of a vector in the 3D domain
requires the 3D spatial information of its two points
P
i
1(x, y,z) and P
i
2(x
′
, y
′
, z
′
):
P
i
1(x, y,z) =
x
i
d
f
y
i
d
f
d
t
i
(16)
P
i
2(x
′
, y
′
, z
′
) =
(x
i
+U
i
)
d
f
(y
i
+V
i
)
d
f
d
t+1
i
(17)
For an accurate 3D representation of the 2D MVs,
U
i
and V
i
are functions of the depth information:
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
100
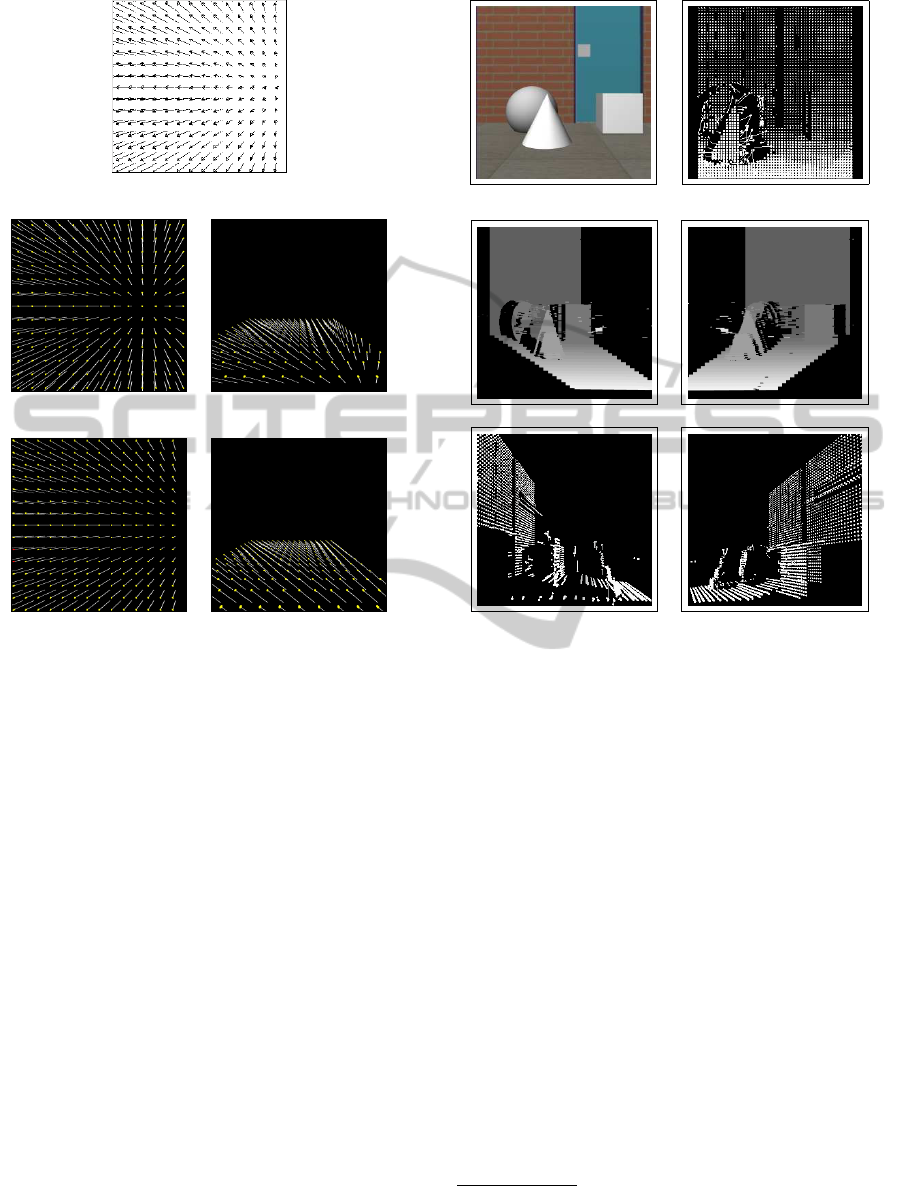
(a)
(b) (c)
(d) (e)
Figure 3: A synthetic 3D motion templates. (a) the gener-
ated 2D MVF of the motion parameters c = (1, 0, 1, 0, 0, 0)
representing translation in the x and z direction. (b-c) the in-
correct 3D MVF and its perspective view in OpenGL gener-
ated using u
i
and v
i
values of the 2D MVF. (d-e) the correct
3D MVF generated using U
i
and V
i
values.
U
i
= u
i
+ (d
t+1
i
− d
t
i
)x
s
(18)
V
i
= v
i
+ (d
t+1
i
− d
t
i
)y
s
(19)
where the u
i
and v
i
are the 2D generated MV com-
ponents. Fig. 3 represents the error resulting from
using the 2D MV components u
i
and v
i
in the esti-
mation of x
′
and y
′
values of a 3D motion parame-
ters c = (1, 0, 1, 0, 0, 0) representing translation in the
x and z direction.
4 RESULTS AND DISCUSSION
In this section, the result of applying the proposed ap-
proach to two different data sets will be presented. In
order to correctly test and analyze the result of the
proposed algorithm, a virtual environment simulating
a mobile robot in a scalable complex scene is used.
In this environment the simulated robot is in front of
(a)
(b)
Figure 4: 3D Representation of MVFs generated from the
simulated framework (Simore). (a) Left, an acquired image
from the mounted stereo camera head in Simore. Right,
the generated MVF. (b) Left, the spatial positioning error of
direct 3D representation of disparity maps. Right, the result
of the 3D MVF representation of the proposed approach.
a stable cube, a moving cone, and a size changeable
ball. The direct 3D representation of disparity maps
generated from the stereo image sequences without
taking into consideration the perspective transforma-
tion results in falsely positioning the MVF in the 3D
spatial domain. Fig. 4 demonstrates the error of a di-
rect 3D representation of disparity maps where the
disparity values belonging to the scene ground are
falsely located along the y axis, and the result of the
proposed 3D MVF representation where the MVs be-
long to the same scene ground are correctly posi-
tioned.
The second data set is representing a real
stereo image sequence squired from a stereo system
mounted on a moving car
1
. The proposed approach
has successfully modeled the 3D spatiotemporal in-
1
Distributed Processing of Local Data for On-Line
Car Services, a DIPLODOC road stereo sequence,
<http://tev.fbk.eu/DATABASES/road.html>
FAST DEPTH-INTEGRATED 3D MOTION ESTIMATION AND VISUALIZATION FOR AN ACTIVE VISION
SYSTEM
101
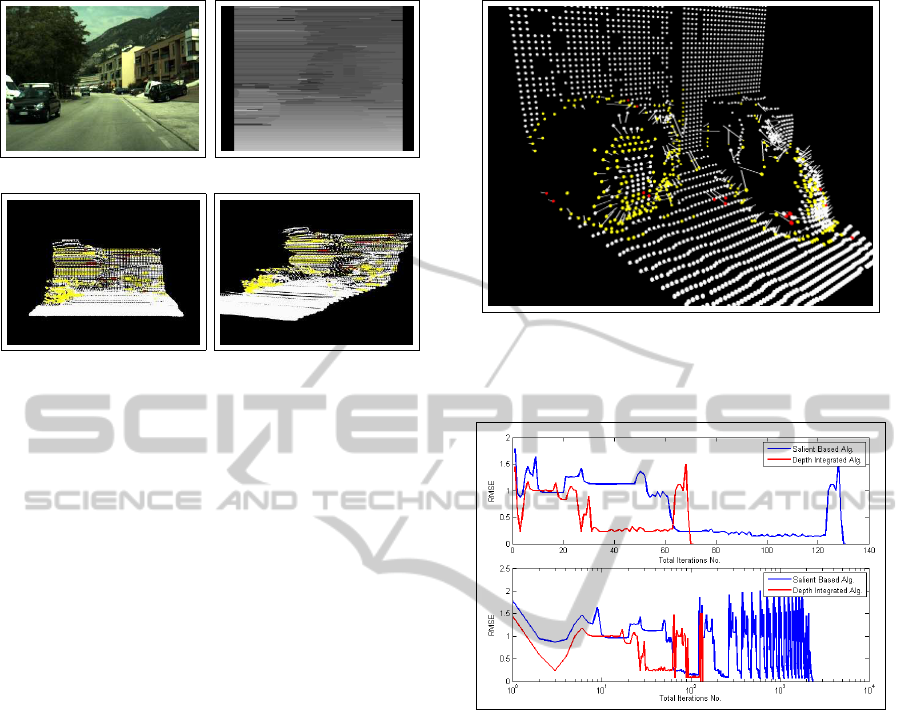
(a)
(b)
Figure 5: 3D Representation of MVFs generated from the
DIPLODOC road stereo sequence. (a) Left, an acquired im-
age from the mounted stereo camera. Right, the generated
depth map. (b) The result of the 3D MVF representation of
the proposed approach.
formation from the generated depth maps as shown in
fig. 5.
The proposed approach for 3D MVFs represen-
tation is very important to the 3D motion segmen-
tation process, especially where the scene ground is
heavily textured which results on generating reason-
able amounts of MVs. Such MVs of the scene ground
should not interfere with other MVs in the 3D mo-
tion segmentation process, otherwise false results will
be generated. The accurate positioning of such MVs
gives the ability to easily detect and eliminate them
before starting the process of 3D motion segmenta-
tion.
Furthermore, detecting a predefined motion pat-
tern as shown in fig. 6 has been achieved where the
cone is moving to the left while the robot is slowly
moving forward and the ball size is increasing, and
also in fig. 5 where the mounted stereo system is mov-
ing forward. The MVs that present the translation in
the z direction (which describes possible upcoming
object movement) are represented in yellow. In the
first data set, the MVs representing the expanding size
of the ball have been detected as a possible collision,
while in the second data set, the detected possible col-
lision were the upcoming car as well as the tree behind
it and some part of the background scene.
On the other hand, the proposed approach has
a significant reduction of the total number of itera-
tions required for the 3D motion segmentation pro-
cess which leads to a noticeable computational time
improvement. Fig. 7 shows the progression of the root
mean square error E
k
(c(p
m
)) over the total iteration
Figure 6: Detection of 3D motion patterns, yellow MVs
represent the translation in the z direction which represents
a possible collision with the robot.
Figure 7: Progression of the root mean square error
E
k
(c(p
m
)) over the total iteration steps k of the previ-
ously represented synthetic MVF for the proposed depth-
integrated algorithm compared to the segmentation ap-
proach in (Shafik and Mertsching, 2008).
steps k of the previously represented synthetic MVF
for the proposed algorithm compared to the segmen-
tation approach in (Shafik and Mertsching, 2008).
5 CONCLUSIONS
We have presented a fast depth-integrated 3D motion
parameter estimation approach which enhanced the
overall computation time of a 3D salient-based mo-
tion segmentation algorithm. In addition, the pre-
sented 3D motion parameters representation algo-
rithm has taken into consideration the perspective
transformation and the depth information to accu-
rately position motion vectors of the generated depth
sequence in the 3D space using the geometrical in-
formation of the stereo camera head. Moreover, the
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
102

proposed approach has successfully detected and es-
timated predefined motion patterns describing impor-
tant 3D motions such as movements toward the robot
which is very helpful in detecting possible future col-
lisions of moving objects with the robot.
REFERENCES
Ali, I. and Mertsching, B. (2009). Surveillance System Us-
ing a Mobile Robot Embedded in a Wireless Sensor
Network . In International Conference on Informatics
in Control, Automation and Robotics, volume 2, pages
293 – 298, Milan, Italy.
Aziz, Z. and Mertsching, B. (2009). Visual Attention in 3D
Space. In International Conference on Informatics in
Control, Automation and Robotics, volume 2, pages
471 – 474, Milan, Italy.
Bruhn, A., Weickert, J., Feddern, C., Kohlberger, T., and
Schnorr, C. (2005). Variational optical flow computa-
tion in real time. 14(5):608–615.
Gruber, A. and Weiss, Y. (2007). Incorporating non-motion
cues into 3d motion segmentation. Computer Vision
and Image Understanding, 108(3):261–271.
Hasler, N., Rosenhahn, B., Thormhlen, T., Wand, M., Gall,
J., and H.-P.Seidel (2009). Markerless motion capture
with unsynchronized moving cameras. In IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR’09).
Kim, J.-H., Chung, M. J., and Choi, B. T. (2010). Recur-
sive estimation of motion and a scene model with a
two-camera system of divergent view. Pattern Recog-
nition, 43(6):2265 – 2280.
Kotth¨auser, T. and Mertsching, B. (2010). Validation vision
and robotic algorithms for dynamic real world envi-
ronments. In Simulation, Modeling and Programming
for Autonomous Robots, LNAI 6472, pages 97 – 108.
Springer.
Li, H., Hartley, R., and Kim, J. (2008). A linear approach to
motion estimation using generalized camera models.
In CVPR08, pages 1–8.
Massad, A., Jesikiewicz, M., and Mertsching, B. (2002).
Space-variant motion analysis for an active-vision
system. In Proceedings of ACIVS 2002, Ghent, Bel-
gium.
Pundlik, S. J. and Birchfield, S. T. (2006). Motion seg-
mentation at any speed. In Proceedings of the British
Machine Vision Conference, Scotland.
Ribnick, E., Atev, S., and Papanikolopoulos, N. (2009). Es-
timating 3d positions and velocities of projectiles from
monocular views. IEEE Trans. Pattern Anal. Mach.
Intell., 31(5):938–944.
Rosenhahn, B., Brox, T., and Weickert, J. (2007). Three-
dimensional shape knowledge for joint image seg-
mentation and pose tracking. Int. J. Comput. Vision,
73(3):243–262.
Schmudderich, J., Willert, V., Eggert, J., Rebhan, S., Go-
erick, C., Sagerer, G., and Korner, E. (2008). Esti-
mating object proper motion using optical flow, kine-
matics, and depth information. IEEE Transactions on
Systems, Man, and Cybernetics, Part B: Cybernetics,
38(4):1139 –1151.
Shafik, M. and Mertsching, B. (2007). Enhanced motion pa-
rameters estimation for an active vision system. In 7th
Open German/Russian Workshop on Pattern Recogni-
tion and Image Understanding, OGRW 07, Ettlingen,
Germany.
Shafik, M. and Mertsching, B. (2008). Fast saliency-based
motion segmentation algorithm for an active vision
system. In Advanced Concepts for Intelligent Vision
Systems (ACIVS 2008), Juan-les-Pins, France.
Shafik, M. and Mertsching, B. (2009). Real-Time Scan-
Line Segment Based Stereo Vision for the Estimation
of Biologically Motivated ClassifierCells. In KI 2009:
Advances in Artificial Intelligence, volume 5803 of
LNAI, pages 89 – 96.
Sotelo, M., Flores, R., Garca, R., Ocaa, M., Garca, M.,
Parra, I., Fernndez, D., Gaviln, M., and Naranjo, J.
(2007). Ego-motion computing for vehicle veloc-
ity estimation. In Moreno-Daz, R., Pichler, F., and
Quesada-Arencibia, A., editors, EUROCAST, volume
4739 of LNCS, pages 1119–1125.
Taylor, J., Jepson, A., and Kutulakos, K. (2010). Non-rigid
structure from locally-rigid motion. In Proceedings of
Computer Vision and Pattern Recognition 2010, San
Francisco, CA.
Tsao, T.-R., Shyu, H.-J., Libert, J. M., and Chen, V. C.
(1991). A lie group approach to a neural system
for three-dimensional interpretation of visual motion.
IEEE Trans. on Neural Networks, 2(1):149–155.
Yamasaki, T. and Aizawa, K. (2007). Motion segmentation
and retrieval for 3-d video based on modified shape
distribution. EURASIP Journal on Advances in Signal
Processing, 2007:Article ID 59535, 11 pages.
Yang, S. and Wang, C. (2009). Multiple-model ransac
for ego-motion estimation in highly dynamic environ-
ments. In IEEE International Conference on Robotics
and Automation (ICRA ’09), pages 3531–3538.
FAST DEPTH-INTEGRATED 3D MOTION ESTIMATION AND VISUALIZATION FOR AN ACTIVE VISION
SYSTEM
103
