
DETECTING AND TRACKING PEOPLE IN MOTION
A Hybrid Approach Combining 3D Reconstruction and 2D Description
Peter Holzer
1
, Chunming Li
2
and Axel Pinz
1
1
Institute of Electrical Measurement and Measurement Signal Processing
Graz University of Technology, Kronesgasse 5, Graz, Austria
2
College of Information Science and Engineering
Hebei University of Science and Technology, Yuxiang Street 26, Shijiazhuang, China
Keywords:
Multibody structure and motion, Fusion of reconstruction and recognition, Person tracking, moving observer.
Abstract:
We analyze the most difficult case of visual surveillance, when people in motion are observed by a moving
camera. Our solution to this problem is a hybrid system that combines the online 3D reconstruction of station-
ary background structure, camera trajectory, and moving foreground objects with more established techniques
in the 2D domain. Once this 3D part has succeeded in focusing the attention on a particular, moving fore-
ground object, we continue in the 2D image domain using a state-of-the art shape-based person detector, and
meanshift-based object tracking. Our results show various benefits of this hybrid approach beyond improved
detection rate and reduced false alarms. In particular, each individual algorithmic component can benefit from
the results of the other components, by gathering a richer foreground description, improved self-diagnosis
capabilities, and by an explicit use of the available 3D information.
1 INTRODUCTION
The past decade has seen many research contribu-
tions in high-level vision that have led to a lot of
very successful applications in object detection and
in surveillance. In particular, person detection is a
highly relevant task, with substantial progress and
success reported for both, person detection in 2D
images, and person tracking by stationary surveil-
lance cameras. In contrast, this paper addresses
the much harder problem of tracking people in mo-
tion, by an arbitrarily moving observer. In this case,
many standard techniques may fail, due to various
reasons, including motion blur, permanently chang-
ing background conditions, simultaneous background
and foreground motion, etc. Other established tech-
niques (e.g. factorization-based approaches to “multi-
body structure and motion” - MSaM) may be inad-
equate because they are computationally too expen-
sive to be applied online. We address exactly these is-
sues, analyze strengths and weaknesses of particular
algorithms, and propose a novel, hybrid approach that
successfully combines online 3D reconstruction by
MSaM, reliable 2D person detection by “histogram of
oriented gradients” - HOG, and robust 2D tracking by
Meanshift. Furthermore, each individual component
of our algorithm can benefit from the results of the
other components in terms of reduced false positives,
improved 3D structure representation, and better self-
diagnosis in cases of lost tracking targets.
Related work includes Shape and Motion recov-
ery, object recognition, and 3D structure recovery.
There has been a detailed survey on visual surveil-
lance (Hu et al., 2004) and pedestrian detection
(Lopez et al., 2010). Both mainly consider static cam-
eras for video recording.
Person detection methods can be classified into
probabilistic-based and non-probabilistic algorithms.
Probabilistic-based algorithms segment a person ac-
cording to a previously established model. (Yan and
Pollefeys, 2008) build a kinematic chain of an ar-
ticulated object to segment articulated motion within
non-rigid parts. (Song et al., 2000) give a method
based on learning an approximate probabilistic model
of the joint positions and velocity of different body
features. These methods are effective but more com-
plicated for establishing a model. On the contrary,
non-probabilistic methods are more simple and adap-
tive to many kinds of objects, i.e. they are not lim-
ited to human models. Among these methods, HOG-
based methods (Dalal et al., 2006; Felzenszwalb et al.,
2008; Lin and Davis, 2010) are the current state of
art in person detection. (Dalal and Triggs, 2005) use
HOG to detect stationary people who are upright and
561
Holzer P., Li C. and Pinz A..
DETECTING AND TRACKING PEOPLE IN MOTION - A Hybrid Approach Combining 3D Reconstruction and 2D Description.
DOI: 10.5220/0003317005610568
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2011), pages 561-568
ISBN: 978-989-8425-47-8
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

fully or almost fully visible. Based on this idea, (Lin
and Davis, 2010) use deformable part models and a la-
tent SVM to improve the performance. (Felzenszwalb
et al., 2008) present an idea of matching a hierarchical
part template tree to detect humans and estimate their
poses. (Dalal et al., 2006) also combined a human
shape descriptor with optical flow to detect moving
people from a video. This algorithm runs a detection
window across the image at all positions and scales,
which is time consuming.
Active tracking of people as well as other ob-
jects is challenging. Core tasks are (i) the detec-
tion and tracking of rigid or sparsely rigid objects by
spatial-temporal trajectories, (ii) the reconstruction of
the (unknown) scene structure, and (iii) the pose es-
timation of the moving observer. Multibody Struc-
ture and Motion (MSaM) addresses these issues. In
MSaM, (Schindler et al., 2008) distinguish between
algebraic methods including factorization-based al-
gorithms (e.g. (Costeira and Kanade, 1995; Costeira
and Kanade, 1998; Yan and Pollefeys, 2006)), and
non-algebraic methods that combine rigid S+M with
segmentation. Non factorization-based methods han-
dling multi-view perspective sequences in dynamic
scenes are addressed by (Fitzgibbon and Zisserman,
2000; Li et al., 2007; Schindler et al., 2008; Oz-
den et al., 2010). But most existing MSaM meth-
ods are computationally expensive and thus not ap-
plicable in real-time. Online MSaM systems, such
as (Leibe et al., 2008) and (Ess et al., 2008) are not
purely geometry-based and require quite elaborated
object detection algorithms. Furthermore, they are re-
stricted to the processing of certain classes of objects
only (cars and people).
We use the online MSaM approach of (Holzer
and Pinz, 2010). In contrast to (Leibe et al., 2008)
and (Ess et al., 2008), it detects and tracks moving
rigid and sparsely non-rigid objects in close to real-
time. The approach is geometry-based, and its output
is in 3D.
2 ENABLING MODULES
This section reviews the basic components of our per-
son detection and tracking system. It involves salient
point detection, MSaM, human shape descriptor, and
Meanshift tracking. We use the HOG (Dalal and
Triggs, 2005) as human shape descriptor. Salient
point detection is required within the MSaM algo-
rithm. Meanshift tracking is used to combine the ad-
vantages of MSaM (3D information) and HOG (state-
of-the-art human shape detector).
2.1 HOG
(Dalal and Triggs, 2005) compute HOG features for
human detection. By using linear and Gaussian-
kernel SVMs as classifiers, they report an extensive
experimental evaluation. HOG shows superior per-
formance in separating the image patches into human
and non-human. It is robust against pose and appear-
ance variations of the pedestrians. Various modifica-
tions (Lin and Davis, 2010; Felzenszwalb et al., 2008)
exist, which improve its performance. Having ex-
cellent detection results, HOG generates false posi-
tives on person like structures (e.g. billboards show-
ing persons). Additionally, HOG results are 2D (im-
age plane) only.
In order to compute a person descriptor, a train-
ing database with positive and negative examples is
needed. A HOG descriptor is computed for each
training example. These descriptors are used to train
the linear SVM. For testing, similar descriptors are
established on testing images and are used as input to
the trained SVM to verify whether one or more per-
sons occur in the image or not.
We apply the standard HOG implementation by
Dalal and Triggs (Dalal and Triggs, 2005). We pro-
vide the whole images as input. So we can get also a
false positive rate by the HOG.
2.2 Multibody Structure and Motion
Multibody Structure and Motion (MSaM) enables the
(i) detection and tracking of moving objects, (ii) ob-
server pose estimation in a global scene, and (iii)
scene reconstruction. The major benefit is that all
available information is in 3D, i.e. we gain informa-
tion on depths and object sizes. In order to have ac-
cess to 3D information, triangulation is required. Ba-
sically, the feature points in one image are compared
with feature points in another image through epipolar
geometry and some descriptor (eg. cross-correlation).
This may either happen through a stereo-camera pair
or monocular multi-view perspective sequences.
Basically the observer’s pose can be estimated
by scene reconstruction. Static, non moving feature
points (inliers) represent the background structure.
By analyzing outliers (typically noise or object mo-
tion), it is feasible to detect and track moving objects.
We use (Holzer and Pinz, 2010) to detect and track
rigid or sparsely-rigid moving objects. (Holzer and
Pinz, 2010) use 3D outlier information to model mo-
tion. In contrast to point cloud matching, the used
MSaM method establishes a local coordinate system
per object.
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
562
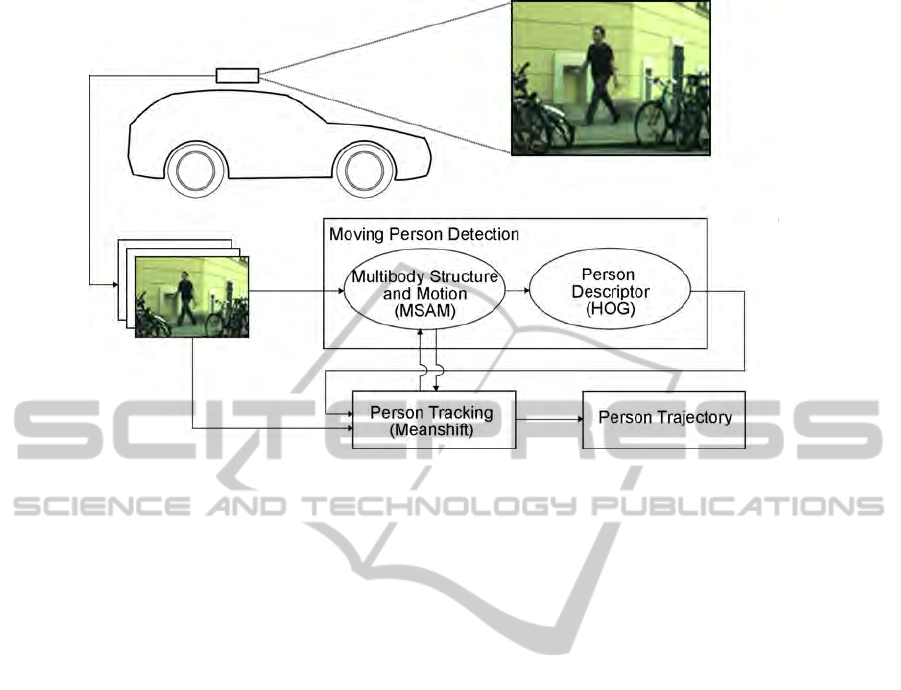
Figure 1: Graphical overview of our system. The system can be divided into three main parts: video capture, person detection
and person tracking.
2.3 Meanshift Tracking
As both - the person and the observer - are moving,
tracking is quite difficult due to the background mo-
tion. Meanshift tracking (Comaniciu and Meer, 2002;
Comaniciu et al., 2003) is a simple iterative proce-
dure. Its principle bases on a similarity measure. It
shifts each data point to the average of data points in
its neighborhood. It is efficient for tracking of a large
variety of non-rigid objects with different color and/or
texture patterns such as human bodies.
For tracking, Meanshift iterations are used to find
the target candidate that is most similar to a given tar-
get model. The similarity is expressed by a metric
based on the Bhattacharyya coefficient.
3 ROBUST PERSON DETECTION
AND TRACKING
In this section, we present our combined detector and
tracking method. Our method uses both, motion in-
formation and human shape information, to detect
and track moving persons. Figure 1 illustrates an
overview of our system.
First, MSaM provides us information on moving
objects. Then, HOG verifies if the moving object is a
person. Finally, Meanshift Tracking is established, to
track the moving person. This is a hybrid approach,
because Meanshift tracking is established by the com-
bination of HOG and MSaM and the output of these
three is compared periodically. Please note, that we
do not rely on the results of Meanshift Tracking alone.
We rather compare the result of Meanshift (2D) with
MSaM (3D projected to 2D image coordinates)/HOG
(2D). In case of divergence, i.e. HOG and/or MSaM
do not match with the Meanshift tracking any longer,
re-initialization of the hybrid tracker is required. Our
main contributions are:
• The fast and robust person detector. Multibody
moving object detection provides possible lo-
cations of persons in 3D. These locations are
searched for human shapes. This increases the
speed of person detection. Firstly, it can reduce
the searching time for a person. The human-shape
descriptor (i.e. the HOG) is computed for this sub-
area only. Secondly, we know the scale because
of MSaM. We can limit the scale-pyramid usid in
HOG to fewer levels.
• The mutual influence of moving object detection
and tracking and person detection makes tracking
more reliable. Many false positives detected by
the HOG can be eliminated. The output of the hy-
brid tracking is fed back to the moving object de-
tection (MSaM). There, this information is used to
harvest more features on the object. By this, we
yield not only outliers but also inliers originally
classified as background structure. These addi-
tional feature points can be used to further im-
prove the estimation of the moving person’s tra-
jectory.
DETECTING AND TRACKING PEOPLE IN MOTION - A Hybrid Approach Combining 3D Reconstruction and 2D
Description
563
(a) (b)
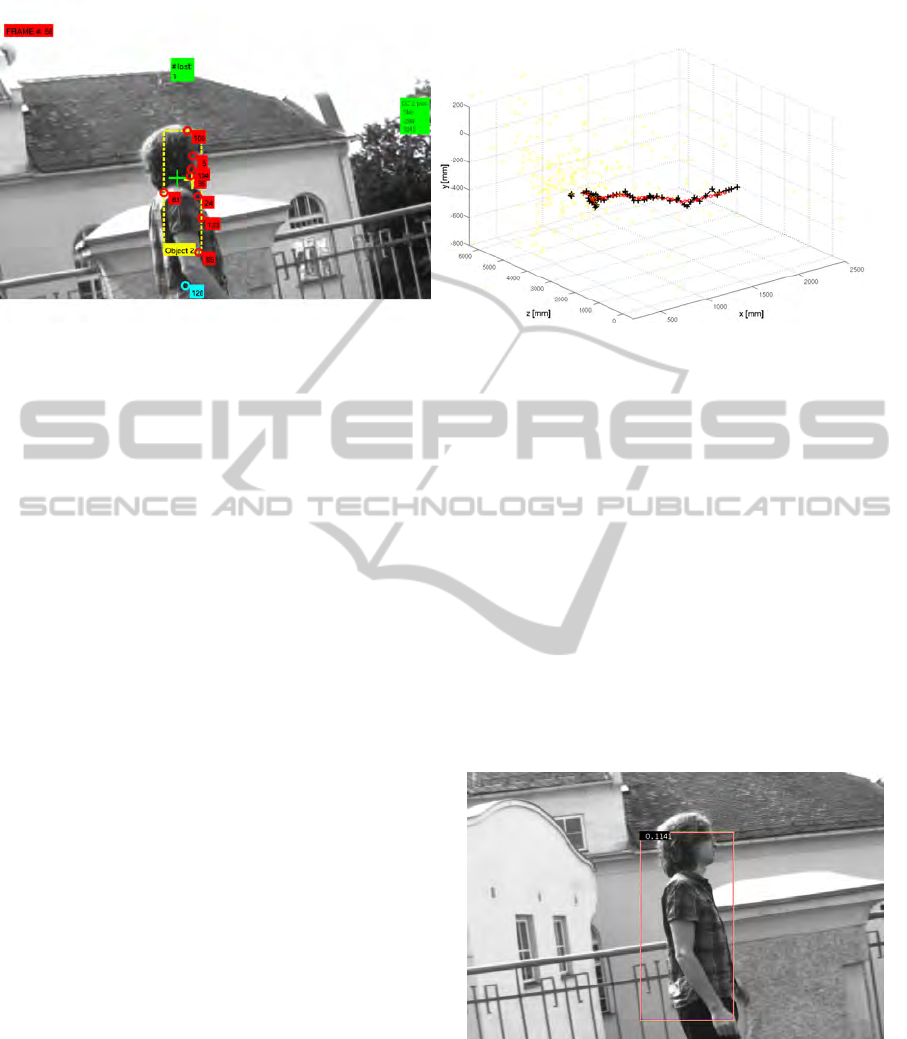
Figure 2: (a) MSaM detection of a moving person. Lost feature points (cyan), active feature points (red), bounding box
(yellow), reference point (yellow cross), Kalman prediction (green cross). (b) Reconstructed trajectory of the moving object.
3.1 Moving Object Detection
The used MSaM (Holzer and Pinz, 2010) requires
feature points in the scene. Stable background fea-
tures (inliers) are used for scene reconstruction and
observer pose estimation. Outliers, which can indi-
cate object motion, are used to detect and track mov-
ing objects. We obtain in 3D scene coordinates (i) the
reconstructed global scene, (ii) 3D pose information
of the observer, and (iii) trajectories of the moving
object(s) in 3D. Thus, we know the distance from the
observer to the moving object and also the size of the
detected (sub-)area.
Estimating the local coordinate system is achieved
by analyzing the 3D outlier information. To provide
a stable origin, a classification routine separates the
available 3D outliers into “active” and “inactive” fea-
tures. Only “active” features are used for the estima-
tion of the origin. The origin of the local coordinate
system is also the reference point of the object; i.e. in-
stead of point cloud matching a single point per ob-
ject is used to estimate the pose of the object. Ad-
ditionally, lost features are estimated in case of re-
appearance. A Kalman filter is introduced, to estimate
the position of the object, in case of temporal occlus-
tions.
Our results show that a moving person is detected
in most cases. However, in many cases the detected
area is smaller than the person (e.g. head only, torso
only, etc). Figure 2(a) shows such a basic MSaM de-
tection, figure 2(b) the corresponding trajectory in 3D
(top-view).
3.2 Moving Person Validation
The output of the MSaM tracking is validated with
HOG. Figure 3 illustrates a correct HOG detection.
From MSaM, we know the distance from the observer
(camera) to the person. Thus, we know which scale
we can apply for the HOG. We cannot guarantee that
the output of MSaM covers a complete person, only
subparts may be detected instead. But, we can enlarge
the MSaM region on the image such that it covers the
whole person. The size of the surrounding region can
be chosen depending on the distance of the person to
the observer. This avoids false positive detections by
the HOG.
Figure 3: HOG Detection of a moving person.
As the MSaM and HOG detection windows can
differ in size massively, we cannot apply the PASCAL
criterion here (refer to equation 4). We consider the
overlap a
val
of HOG and MSaM as correct match, if
the overlap is larger than 50% of the smaller area of
either HOG or MSaM (eg. 1). In most cases, the HOG
area is larger, as MSaM mostly detects subparts of a
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
564

person only.
a
val
:= max(a
MSaM
, a
HOG
) > 0.5 (1)
where
a
MSaM
=
area(B
MSaM
∩ B
HOG
)
area(B
MSaM
)
(2)
a
HOG
=
area(B
MSaM
∩ B
HOG
)
area(B
HOG
)
(3)
3.3 Supporting Structure by Feedback
Control
Once an overlap of HOG and MSaM occurs, Mean-
shift tracking is initialized. We take the region within
the bounding box of the HOG as input for Meanshift
Tracking. For the subsequent frames, we consider
tracking successful, if either HOG or MSaM over-
lap with the Meanshift tracking for more than 50%.
Otherwise, if for a certain amount of frames neither
HOG nor MSaM match with the Meanshift tracking
window, Meanshift tracking is stopped. As a human’s
shape has symmetric properties, it is possible to use
Meanshift tracking, i.e. to track a person according
to the histogram. In contrast to MSaM, Meanshift
Tracking provides 2D information only.
By feeding back the Meanshift tracking informa-
tion to MSaM, we are in the position to periodically
inspect MSaM and Meanshift Tracking. In case of
major differences, person tracking is re-initialized.
This feedback routine has also advantages on the
available feature points. If MSaM overlaps with the
Meanshift tracker, we can search for supporting struc-
ture in the overlap. We call every stable feature point
(inlier) a supporting structure, if it is in the overlap of
MSaM and Meanshift tracker and approximately at
the same 3D depth as the object’s reference point of
the MSaM. With this routine, we gather more feature
points on the object, i.e. estimation of the person’s
trajectory will become more precise. Fig. 4 shows the
MSaM tracker, the Meanshift tracker and the gathered
supporting structure.
4 EXPERIMENTAL RESULTS
In this section, we present four selected experiments
with our hybrid tracking system. These experiments
span a range of challenges. Experiment 1 shows a
controlled experiment, where a cup and a toy-cow are
pulled by a string through the scene. The background
contains a lot of structure; amongst other pictures of
Figure 4: MSaM detection of a moving person (yellow
bounding box); Meanshift tracking of person (green bound-
ing box); supporting structure (yellow circles).
people. The result demonstrates that our hybrid algo-
rithm can supress false HOG positives. Experiment
2 tracks a person with a fast moving observer. More-
over, the person is not fully in the image. Here, the re-
sult of hybrid tracking improves the performance over
individual HOG and MSaM. Experiment 3 shows a
similar scene, but the person is moving towards the
camera, which results in a change of scale. At the end
of the sequence, the person is only partially visible.
Again the good performance of the hybrid tracking is
shown. Experiment 4 is a special case; the person is
far away and partly visible behind a set of bicycles.
Here, HOG performs much better than MSaM. Ne-
glecting the PASCAL criterion for the hybrid tracking
approach, the results are still promising.
When referring to positive detections we consider
the PASCAL criterion. This means, (i) the correct
detection requires an overlap a
o
of the ground truth
bounding box B
gt
and predicted bounding box B
p
over 50% and (ii) multiple detections of the same ob-
ject are considered false detections.
a
o
:=
area(B
p
∩ B
gt
)
area(B
p
∪ B
gt
)
> 0.5 (4)
The MSaM detections are not evaluated with the
PASCAL criterion. As mentioned earlier, most of the
detections contain only subparts of an object, depend-
ing on the available outlier feature points. We render
an MSaM detection correctly, when an object fills at
least 50% of the the detected region (equation 1). A
correct MSaM detection is illustrated in figure 2(a).
Experiment 1: The scene consists of 180 frames in
total. MSaM tracks the moving objects (cup and cow
pulled by a string) very well. HOG has no correct
detections, as no person is moving in the scene. How-
ever, HOG detects 105 false positives in the back-
ground. The hybrid approach eliminates the false pos-
itives. The hybrid tracking has no results, as no per-
DETECTING AND TRACKING PEOPLE IN MOTION - A Hybrid Approach Combining 3D Reconstruction and 2D
Description
565
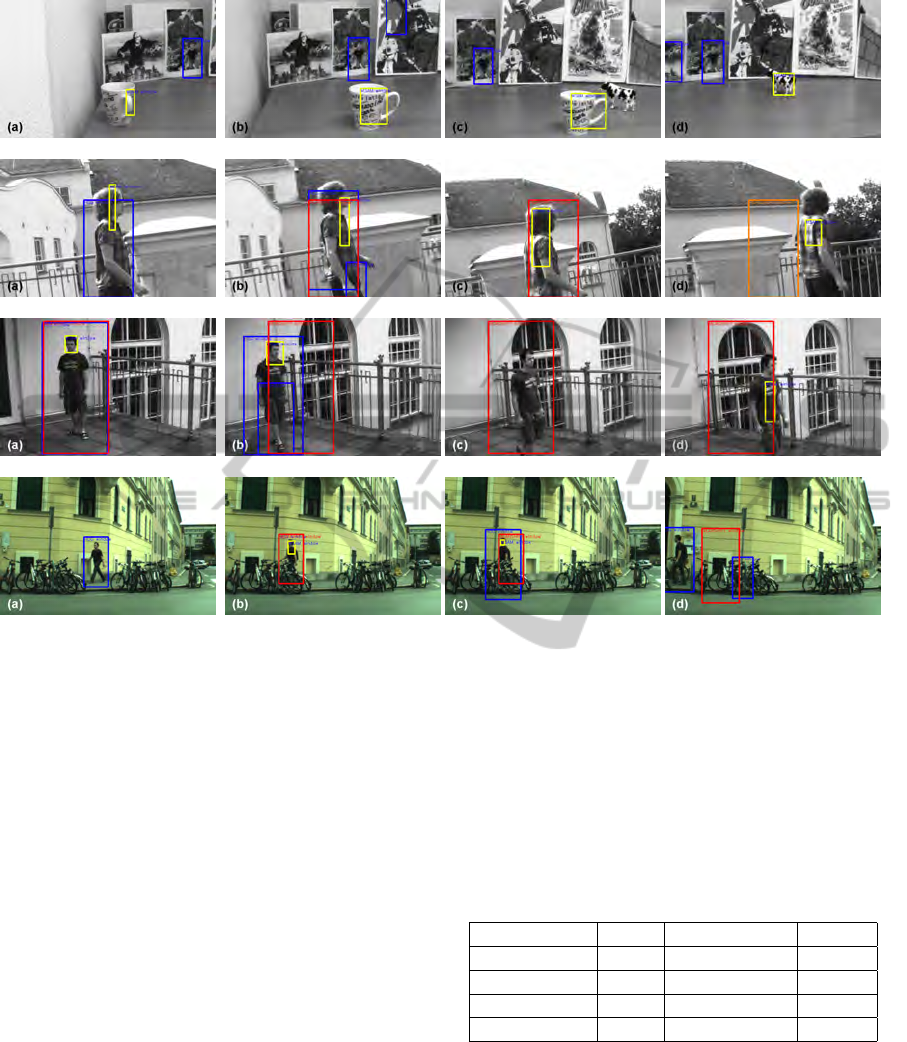
Figure 5: Experiment 1 (row 1): 3D-output back-projected to the image-plane. Bounding box of MSaM tracking (yellow);
boundig boxes of HOG detections (blue); no hybrid tracking, as no moving person in scene. Experiment 2 (row 2): 3D-
output back-projected to the image-plane. Overlap of HOG and MSaM initializes hybrid tracking (red) (a); hybrid tracking
(red), MSam tracking (yellow), and HOG detections (blue) (b); no HOG detection (c); hybrid tracking lost target (orange),
deactivation of hybrid tracking is imminent (d). Experiment 3 (row 3): MSaM (yellow), HOG (blue), and hybrid tracking
(red) (a); HOG false positive detection, correct MSaM detection (yellow), and false hybrid detections (red) according to the
PASCAL criterion (b); only hybrid tracking (red) works (c), correct MSaM tracking (yellow) but false positive detection of
hybrid tracking according to the PASCAL criterion (d). Experiment 4 (row 4): Only HOG detection (blue) (a); HOG (blue),
MSaM (yellow), and hybrid detection (red) (b); HOG (blue), MSaM (yellow), and hybrid tracking (red) works (c), no further
MSaM tracking possible, multiple HOG detections (blue), false hybrid tracking (red) (d).
sons move in the scene. Table 1 shows the results.
HOG has no positive detections, as no real person is
in the scene. Instead, it has a lot of false positives.
MSaM tracks the cup reliably (91.5%). The inferior
result for the cow (54.5%) is due to the temporal oc-
clusion of the cow by the cup. The hybrid tracking
eliminates the false positives of the HOG. As no per-
son is moving, it has no detections. In line “Avg #M
gain”, the average amount of additional supporting
features gathered by hybrid tracking is listed. As no
person is moving, it is equal to zero.
Experiment 2: The scene consists of 99 frames in
total. The results are shown in table 2. MSaM tracks
the person well. The HOG detection rate is rather low,
as (i) the observer moves rapidly and (ii) the person is
only partly in the scene. MSaM tracking is more re-
Table 1: Experiment 1: Quantitative Results. 180 frames in
total.
HOG MSaM Hybrid
Det. Rate - 91.5%/54.5% -
False Pos. 105 -/- -
No Det. - 8.5%/45.5% -
Avg #M gain - - -
liable, but is below 70% due to motion blur and the
lack of outliers on the person in the first 30% of the
frames. Hybrid tracking seems to be worse than the
MSaM tracking. This is due to the PASCAL crite-
rion. The reqirements on the hybrid tracking are much
higher compared to MSaM. Combining the false posi-
tives and the correct detecions, hybrid tracking would
perform the same as MSaM. 14.1% of no detections
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
566

are due to the Meanshift’s limits on grayscale images
and the too large HOG window on the initialization (a
lot of background). With hybrid tracking, we get an
average of 8.8 points per frame of additional feature
points.
Figure 6: Experiment 1: HOG false positive.
Table 2: Experiment 2: Quantitative Results. 99 frames.
HOG MSaM Hybrid
Det. Rate 17.2% 64.6% 42.4%
No Det. 80.8% 33.4% 14.1%
False Pos. 2 0 21
Avg #M gain - - 8.8
Experiment 3: The scene consists of 161 frames in
total. In contrast to experiment 2, where the person
moves parallal to the observer, here the person walks
towards the observer. This results in a scale change of
the person. The results are shown in table 3. MSaM
tracks the person well. The HOG detection rate is
again rather low. MSaM tracking is more reliable,
as it does not refer to the PASCAL criterion. Hy-
brid tracking again seems to be worse than the MSaM
tracking. But combining the positive and false de-
tection rate it would outperform the MSaM approach.
Feeding back the hybrid tracking result to the MSaM,
we get an average amount of 4.6 supporting structure
points on the object.
Table 3: Experiment 3: Quantitative Results. 161 frames.
HOG MSaM Hybrid
Det. Rate 23% 79.5% 40.4%
No Det. 77% 20.5% 14.9%
False Pos. 47 - 71
Avg #M gain - - 4.6
Experiment 4: The scene consists of 55 frames in
total. The results are shown in table 4. The MSaM
result is poor. The person is small and uniformly col-
ored, i.e. very few outlier feature points are found on
Figure 7: Experiment 1: Meanshift false positive according
to the PASCAL criterion.
the object. The HOG detection rate is very good, even
when the person is partly occluded. Hybrid tracking
seems to be worse than the MSaM tracking. Again,
neglecting the PASCAL criterion, the result of hy-
brid tracking is similar to the good performance of
the HOG. But in contrast to the HOG, hybrid track-
ing deals with 3D information. The average amount
of 1.1 supporting structure points on the object can be
explained be the low hybrid detection rate.
Table 4: Experiment 4: Quantitative Results. Human in
scene: 55 frames.
HOG MSaM Hybrid
Det. Rate 78.2% 16.4% 10.9%
False Pos. 30 0 52
No Det. 20% 83.6% x
Avg #M gain - - 1.1
Summing up all experiments, the following obser-
vations can be made:
• The MSaM’s detection rate is typically higher
than HOG’s or hybrid’s. As we cannot control,
which parts of an object are detected by MSaM
(texture), we cannot use the PASCAL criterion.
• The hybrid tracking provides 3D information. We
can speed-up the HOG, as (i) we know the dis-
tance to the person (fewer pyramid levels) and (ii)
we get a rough idea, where to search in an image
(region of interest)
• The hybrid tracking provides important feedback
for MSaM. We can investigate inliers in a larger
subarea (HOG window / Hybrid tracking win-
dow). Knowing the distance, we find supporting
structure for a person, which can help to improve
the estimation of the person’s reference point.
DETECTING AND TRACKING PEOPLE IN MOTION - A Hybrid Approach Combining 3D Reconstruction and 2D
Description
567

5 CONCLUSIONS
We have presented a moving person detection and
tracking system. As tracking by a moving observer
is a difficult task, we combined 3D algorithms with
2D descriptors and tracking algorithms. The system
allows a moving observer and moving objects. Be-
cause we use MSaM, we obtain 3D information on
the scene, observer motion, and object motion.
By combining different components, we gain a
mutual benefit. By combining the HOG with the
MSaM tracker, we get 3D information of the person
motion and eliminate false postive HOG detections.
By feeding back the Meanshift tracking, we can har-
vest additional features on the object for improved
MSaM performance. Our system deals with 3D and
2D information. As we know the 3D depth and the
position in the image-plane, we can speed up HOG
(fewer pyramid levels, image subarea validation).
Extensions to other categories are possible. The
system is not limited to a human shape descriptor. In-
troducing different descriptors, the system can track
different (or even multiple) categories.
REFERENCES
Comaniciu, D. and Meer, P. (2002). Mean shift: A ro-
bust approach toward feature space analysis. PAMI,
24:603–619.
Comaniciu, D., Ramesh, V., and Meer, P. (2003). Kernel-
based object tracking. PAMI, 25:564–577.
Costeira, J. and Kanade, T. (1995). A multi-body factor-
ization method for motion analysis. In ICCV, pages
1071–1076.
Costeira, J. P. and Kanade, T. (1998). A multibody fac-
torization method for independently moving objects.
IJCV, 29:159–179.
Dalal, N. and Triggs, B. (2005). Histogram of oriented gra-
dients for human detection. In CVPR.
Dalal, N., Triggs, B., and Schmid, C. (2006). Human de-
tection using oriented histograms of flow and appear-
ance. In ECCV.
Ess, A., Leibe, B., Schindler, K., and van Gool, L. (2008). A
mobile vision system for robust multi-person tracking.
In CVPR.
Felzenszwalb, P. F., McAllester, D., and Ramanan, D.
(2008). A discriminatively trained, mulitscale, de-
formable part model. In CVPR.
Fitzgibbon, A. W. and Zisserman, A. (2000). Multibody
structure and motion: 3-d reconstruction of indepe-
nently moving objects. In ECCV.
Holzer, P. and Pinz, A. (2010). Mobile surveillance by 3d-
outlier analysis. In ACCV Visual Surveillance Work-
shop.
Hu, W., Tan, T., Wang, L., and Maybank, S. (2004). A
survey on visual surveillance of object motion and be-
haviors. Trans. on Systems, Man, and Cybernetics,
34:334–352.
Leibe, B., Schindler, K., Cornelis, N., and Gool, L. V.
(2008). Coupled object detection and tracking from
static cameras and moving vehicles. PAMI, 30:1683–
1698.
Li, T., Kallem, V., Singaraju, D., and Vidal, R. (2007). Pro-
jective factorization of multiple rigid-body motions.
In CVPR.
Lin, Z. and Davis, L. S. (2010). Shape-based human detec-
tion and segmentation via hierarchical part-template
matching. In PAMI.
Lopez, D. M., Sappa, A. D., and Graf, T. (2010). Survey
of pedestrian detection for advanced driver assistance
systems. PAMI, 32:1239–1258.
Ozden, K., Schindler, K., and Gool, L. V. (2010). Multibody
structure-from-motion in practice. PAMI, 32:1134–
1141.
Schindler, K., Suter, D., and Wang, H. (2008). A
model-selection framework for multibody structure-
and-motion of image sequences. IJCV, 79:159–177.
Song, Y., Feng, X., and Perona, P. (2000). Towards detec-
tion of human motion. In CVPR.
Yan, J. and Pollefeys, M. (2006). A general framework for
motion segmentation: Independent, articulated, rigid,
non-rigid, degenerate and non-degenerate. In ECCV,
pages 94–106.
Yan, J. and Pollefeys, M. (2008). A factorization based
approach for articulated nonrigid shape, motion, and
kinematic chain recovery from video. PAMI, 30:865–
887.
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
568
