
GLOBAL ILLUMINATION USING IMPERFECT VOLUMES
Pavlos Mavridis and Georgios Papaioannou
Department of Informatics, Athens University of Economics & Business, Athens, Greece
Keywords:
Real-Time Diffuse Global Illumination, Spherical Harmonics, Voxelization, Ray Marching.
Abstract:
This paper introduces the concept of imperfect volumes, a fast one-pass point-based voxelization algorithm,
and presents its applications to the global illumination problem. As often noted, diffuse indirect illumination
has the characteristics of a low frequency function, consisting of smooth gradations. We exploit this by
performing the indirect lighting computations on a rough approximation of the scene, the imperfect volume.
The scene is converted on the fly to a dense point cloud, and each point is directly rendered to a volume texture,
marking the corresponding voxel as occupied. A framebuffer reprojection scheme ensures that voxels visible
to the main camera will get more points. Ray-marching is then used to compute the ambient occlusion or the
indirect illumination of each voxel, and the results are stored using spherical harmonics. We demonstrate that
the errors introduced by the imperfections in the volume are small and that our method maintains a high frame
rate on scenes with high geometric complexity.
1 INTRODUCTION
In computer graphics the goal of global illumination
algorithms is to produce convincing images of an arti-
ficial world. Given a scene description, including the
geometry, surface properties and light source descrip-
tions, they simulate the complex interactions of the
light with the world, like diffuse and specular inter-
reflections, in order to generate realistic and accurate
images. Such accuracy is desired for architectural vi-
sualization, feature film production and even for real-
time applications, but is often omitted due to the high
cost associated with the calculation of global illumi-
nation effects.
High quality global illumination at interactive
speed is still an unsolved problem for large and dy-
namic scenes. In this paper we propose a method that
produces realistic images of diffuse, dynamic envi-
ronments in real time, by estimating the diffuse in-
direct light transport at discrete locations in the envi-
ronment and applying the results on the scene geom-
etry. To do so, we introduce the imperfect volume, a
rough approximation of the scene, storing occupancy
and lighting information in a uniform grid data struc-
ture. The way this volume is constructed ensures that
visible surfaces will get a nearly perfect voxelization,
through a frame buffer reprojection scheme, while the
rest of the scene may contain inaccuracies, like miss-
ing voxels. Radiance or ambient occlusion (AO) is
computed at the center of each voxel using volume
ray-marching and the results are stored in the volume
using spherical harmonics. Finally the diffuse indirect
illumination of each visible point is reconstructed by
sampling the radiance of the closest voxels in the vol-
ume. We demonstrate that the low frequencynature of
the diffuse indirect illumination tends to mask the in-
troduced imperfections, while the performance gains
from such an approximation are substantial.
2 PREVIOUS WORK
Instant radiosity methods (Keller, 1997) approximate
the indirect illumination of a scene using a set of Vir-
tual Point Lights (VPLs). VPLs are created by tracing
photos on the scene, then the scene is rendered, as lit
by each VPL. The major cost of this method is the
visibility queries for a large number of point lights.
Lightcuts (Walter et al., 2005) reduce the number of
the required queries by clustering the VPLs in groups,
but the performance is still far from real-time.
Reflective shadow maps (Dachsbacher and Stam-
minger, 2005)(Dachsbacher and Stamminger, 2006)
consider the pixels of a shadow map as VPLs, but the
contribution of these lights is gathered without taking
scene occlusion into account. To achieve interactive
160
Mavridis P. and Papaioannou G..
GLOBAL ILLUMINATION USING IMPERFECT VOLUMES.
DOI: 10.5220/0003318601600165
In Proceedings of the International Conference on Computer Graphics Theory and Applications (GRAPP-2011), pages 160-165
ISBN: 978-989-8425-45-4
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

frame rates, screen space interpolation is required and
the method is limited to the first bounce of indirect il-
lumination. Imperfect shadow maps (ISM) (Ritschel
et al., 2008) use a point based representation of the
scene to efficiently render extremely rough approxi-
mations of the shadow maps for all the VPLs in one
pass. They achieve interactive frame rates but indirect
shadows are smoothed out considerably by the imper-
fections of the shadow maps. Like ISMs, our method
also uses an imperfect representation of the scene, but
our method has much better scalability with the final
image resolution.
Micro-Rendering (Ritschel et al., 2009a) gathers
illumination by rasterizing a point based representa-
tion of the scene from many different viewpoints in
parallel. The results are accurate but the frame rate is
interactive only in relatively simple scenes.
McGuire (McGuire and Luebke, 2009) adapts
the photon mapping (Jensen, 1996) algorithm on the
GPU. The first bounce of the photons is computed
using rasterization on the GPU, but the rest of the
bounces are computed on the CPU, making the al-
gorithm impractical unless a large number of parallel
cores are used.
Directional occlusion (Ritschel et al., 2009b) ex-
tends previous screen space methods (Shanmugam
and Arikan, 2007) and approximates the first indirect
diffuse bounce of the light by only using information
in the frame buffer. The computational cost is low but
the resulting illumination is hardly accurate since it
depends on the projection of the visible objects on the
screen.
The irradiance cache (Ward et al., 1988) stores ac-
curate irradiance estimates on a few surface points
and for the remaining ones fast interpolation is used.
Radiance caching (Kˇriv´anek et al., 2005) extends the
concept to store radiance instead of irradiance, us-
ing spherical harmonics. (Wang et al., 2009) presents
a method to calculate the radiance sample points in
advance and implements the algorithm on the GPU.
The method is accurate but achieves interactive frame
rates only in very simple scenes. (Nijasure et al.,
2004) places the sample points on a grid, but to
estimate the radiance on each point, the complete
scene must be rendered on a cube map, making the
method expensive. (Kaplanyan and Dachsbacher,
2010) avoids this cost by using an iterative propaga-
tion scheme to calculate the radiance distribution on
the scene. The method achieves high performance but
indirect occlusion is only limited to surfaces visible in
the camera and the shadowmaps. Compared to that,
the imperfect volume has the advantage that occlusion
information is available for the whole scene.
(Papaioannou et al., 2010) computes AO by trac-
Figure 1: For each input triangle, random points are created,
marking the corresponding voxels as occupied.
ing rays on a volume representation of the scene from
visible points, but to achieve real time performance
AO is computed at a lower resolution. Our method
also traces rays in a volume, but can achieve better
performance by doing it at regular intervals in world
space and not for every visible surface point.
3 METHOD OVERVIEW
Our method first creates the imperfect volume from
a dense point cloud representation of the scene, cre-
ated on the fly using geometry shaders. After that, the
imperfect volume is refined using the visible points
from the main camera. Next, the incoming radiance or
the AO of each voxel is computed using ray-marching
and monte carlo integration and finally, during image
rendering, the irradiance of each surface point is cal-
culated taking into account the radiance of the nearest
voxels.
3.1 Imperfect Volume Creation
Our goal is to create a volume representation of the
full scene, storing occupancy and illumination infor-
mation. Previous fast one-pass voxelization algo-
rithms, like (Eisemann and D´ecoret, 2008), cannot
be used because our algorithm requires multi-channel
floating point data rather than binary values in each
voxel. Since we consider our scenes fully dynamic,
the complete volume representation must be rebuilt in
every frame, so a high performance algorithm is es-
sential for our method.
The volume is created from a dense point-cloud
representation of the scene. Although we can pre-
calculate the point cloud in advance, we chose to gen-
erate it on the fly using the geometry shader function-
ality of the latest graphics cards. This approach has
the advantage that an additional point-based represen-
tation and storage of the scene is not required, some-
thing that simplifies the integration with the rendering
pipeline of typical real-time applications.
For each input triangle with area A, N random
GLOBAL ILLUMINATION USING IMPERFECT VOLUMES
161

points are generated with probability density p(x) =
1/A. The geometry shader takes as input a triangle
and emits N points. For each emitted point, the appro-
priate slice of the volume is calculated and the point
is directly rendered to this slice, marking the corre-
sponding voxel as occupied. For each point, the di-
rect illumination is calculated using the interpolated
normal from the input triangle and the result is stored
in the volume using a spherical harmonics represen-
tation.
The obvious flaw in the above algorithm is that
there is guarantee that every occupied voxel will re-
ceive a random point, but as the density of the gener-
ated points increases, the probability that an occupied
will not receive a random point tends to zero.
It should be noted that geometry shaders are not
fast doing data amplification, so when producing
more random points the performance quickly drops.
It’s more preferable to tessellate big triangles at load
or content creation time, than to generate more points
at run-time. We have also experimented with adap-
tively adjusting the number of generated points de-
pending on the size of the triangle, but the perfor-
mance turned out to be slower.
3.2 Visible Point Reprojection
In this step the visible regions of the imperfect volume
are refined with data from the framebuffer. Before
this step, the depth, normals and albedo of the surface
points visible to the camera are recorded in a g-buffer
(Akenine-M¨oller et al., 2008) using deferred render-
ing. Direct illumination is calculated for all fragments
and the visible points from the main camera are repro-
jected in the imperfect volume and the corresponding
voxels are updated.
To perform this reprojection, an array of points is
used, each point corresponding to a pixel in the frame-
buffer. Each point reads the depth of the correspond-
ing pixel in the vertex shader and is projected from
clip coordinatesback to world space, to be reprojected
in the imperfect volume. A geometry shader routes
the points to a slice of the 3D volume according to
their depth in world space coordinates. Finally, the
fragment shader reads the albedo, normal and the di-
rect lighting of the point, already computed and stored
by the deferred renderer, and stores it to the volume
using a spherical harmonics representation according
to the normal of the point.
Since the number of the visible points that are pro-
jected in the volume is considerably larger than the
number of the visible voxels, this operation results in
an almost perfect voxelization of the visible surfaces,
eliminating most of the potential gaps in the visible
Figure 2: Computing the radiance or visibility distribution
at surface point p. To avoid bias from self intersections,
the point is displaced half a voxel along the normal n to
the position p
′
, and a more accurate radiance distribution is
recomputed from the radiance of neighboring voxels. Vox-
els behind the surface, marked with a black square, do not
contribute to the computation.
portion of the imperfect volume.
3.3 Volume Sampling and Radiance
Caching
The incoming radiance distribution of each voxel L
i
is
stored in the volume as a vector of spherical harmonic
coefficients λ
m
l
, such as
L
i
(θ,φ) =
n−1
∑
l=0
l
∑
m=−l
λ
m
l
Y
m
l
(θ,φ) (1)
where n is the order of the SH representation
and Y
m
l
are the spherical harmonic basis func-
tions(Ramamoorthi and Hanrahan, 2001). Our im-
plementation uses a 2
nd
order spherical harmonic rep-
resentation, since the four SH coefficients map very
well to the four component buffers supported by the
graphics hardware. The coefficients λ
m
l
can be com-
puted with the following integral
λ
m
l
=
Z
2π
0
Z
π/2
−π/2
L
i
(θ,φ)Y
m
l
(θ,φ)sinθdθdφ (2)
Since we don’t have an analytical form for L
i
, but we
can take samples of this function using raycasting, we
compute λ
m
l
using monte carlo quadrature with uni-
form sampling
λ
m
l
=
4π
N
N
∑
j=1
L
i
(θ
j
,φ
j
)Y
m
l
(θ
j
,φ
j
) (3)
where L
i
is the incoming radiance from the (θ
j
,φ
j
)
direction of the sphere and N is the total number of
samples.
In order to compute the L
i
term in equation 3, we
sample the radiance that is stored in the volume repre-
sentation of the scene. For every voxel, N random di-
rections on the sphere are created using stratified sam-
pling, and rays starting from the center of the voxel
GRAPP 2011 - International Conference on Computer Graphics Theory and Applications
162
are traced using ray-marching, a process where the
volume is sampled in regular intervals along the ray,
until an occupied cell is found or the extends of vol-
ume are reached.
In the case of AO calculation, we sample and store
the directional visibility instead of the incoming radi-
ance. We also limit the ray-marching distance to a
short range, making the AO calculation much faster
than GI.
Even though the rays start from the center of
each voxel, to avoid self intersections the actual ray-
marching should start outside the originating voxel.
To do this an initial distance d
s
along each ray should
be skipped. For cubic voxels of size s
v
the distance
that we skip is d
s
=
√
3
2
s
v
, which is the radius of the
bounding sphere of the voxel. This scheme does not
avoid self intersections with neighboring voxels po-
tentially generated from the same polygon, but we
skip these intersections when doing the final per-pixel
irradiance reconstruction, as described in the next sec-
tion.
Our method samples the illumination from one
volume buffer and writes the results to another one.
By alternating between those two buffers in succes-
sive passes we compute multiple bounces of the light.
3.4 Irradiance Reconstruction
The diffusely reflected light, or radiosity B, of a point
x on a surface with diffuse reflectivity ρ is given by
the following equation (Kajiya, 1986):
B(x) =
ρ(x)
π
Z
Ω
L
i
(x,ω)cosθdω (4)
where θ is the angle between the surface normal and
the incident radiance direction ω.
During the final scene rendering, equation 4 must
be evaluated for every visible surface point in order to
determine the color of each pixel. To determine the
incident radiance L
i
of a surface point in the scene,
we don’t take in to account the radiance of the corre-
sponding voxel in the volume, because the stored ra-
diance distribution will be biased from intersections
with neighboring voxels, potentially generated from
the same surface. Instead, we shift the surface point
outside the current voxel by moving it half a voxel
along the normal, and then we recalculate a more ac-
curate distribution of the radiance, taking in to ac-
count the surface orientation and the radiance of the
N closest voxels, using the following equation
˙
L
i
=
∑
N
j=1
w
j
˙
L
ij
∑
N
j=1
w
j
, where w
j
=
cosθ, θ < π/2
0, θ > π/2
(5)
Table 1: The performance of our method (times in millisec-
onds on a NVIDIA GTX460). G: number of triangles, T
i
:
time when emitting i vertices per triangle, T
AO
,T
GI
: Ray-
marching time for AO and GI(per bounce) respectively. The
framebuffer reprojection time for 512
2
points is 0.7ms on all
scenes.
G T
3
T
9
T
AO
T
GI
sponza 262267 3.8 11.6 4.4 31.2
knossos 109168 1.5 4.5 4.3 32.9
arena 10219 0.2 0.6 4.6 35.7
room 8760 0.3 0.8 4.3 35.0
0
10
20
30
40
50
60
20k
40k
60k
80k
100k
Milliseconds
Triangles
32
64
96
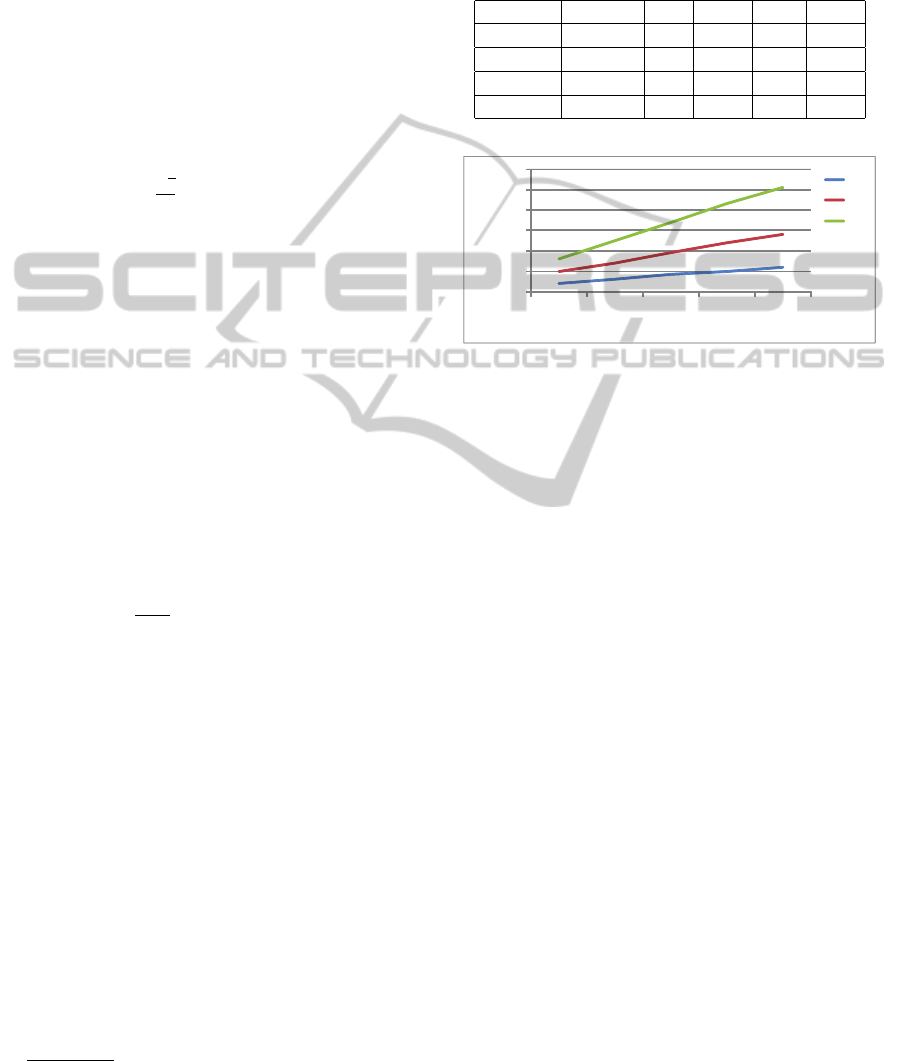
Figure 3: Volume creation scaling with the number of tri-
angles and the volume size. When the volume resolution
is doubled, the number of generated points per triangle are
also doubled, to keep the quality of the voxelization identi-
cal. Times measured in milliseconds on a ATI Radeon 3650.
where
˙
L denotes the spherical harmonic representa-
tion of L. The weights w
i
, as illustrated in Figure 2,
guarantee that voxels behind the surface will not con-
tribute to the radiance computation, and that voxels
facing the normal of the surface will contribute the
most. For performance reasons, in the actual imple-
mentation of the algorithm we only consider the six
nearest voxels.
Finally, since the radiance
˙
L
i
is represented using
spherical harmonics, we compute the irradiance in-
tegral in equation 4 as a simple dot product with an
analytically computed spherical harmonic representa-
tion of the cosine lobe(Ramamoorthi and Hanrahan,
2001), directed towards the surface normal.
4 RESULTS
We have integrated the above algorithm in a tradi-
tional real-time deferred renderer using OpenGL and
GLSL. Unless otherwise noted, all figures presented
here are created with 12 random points per triangle,
100 rays per voxel, 64
3
voxels and a ray marching
step size of one voxel.
Table 1 shows comprehensive time measurements
for our method. All scenes are considered to have
GLOBAL ILLUMINATION USING IMPERFECT VOLUMES
163

Figure 4: Left: Diffuse GI from one point light source. No-
tice the indirect light on the crates. Right: Occlusion using
a) 9 points per triangle, b) 12 points per triangle, c) 3 points
per triangle plus voxelization with framebuffer reprojection.
fully dynamic geometry and lighting conditions. We
can see that even on the most complex scenes, our
algorithm maintains an interactive framerate and, as
expected, the AO is much faster than GI, since the
ray-marched distance is shorter and only the coverage
information is fetched from the volume.
As shown, imperfect volumes can be created ex-
tremely fast, even for very large datasets. The per-
formance of our method, but also the quality of the
resulting volume, depends on the number of the gen-
erated points per triangle. In most scenes we get
nearly perfect voxelization with 12 to 19 points. But
since the framebuffer reprojection scheme guarantees
a nearly perfect voxelization of the visible portion of
the imperfect volume, in practice we rarely need to
use more than 6 points per triangle.
Figure 3 shows how the volume creation algo-
rithm scales with the number of input triangles and
the volume resolution. When the volume resolution is
doubled we also double the number of the generated
points, to keep the density of the points per voxel con-
stant. We observe sub-linear scaling with the number
of triangles and linear scaling with the volume size.
Figure 4 shows how the imperfections of the
volume are refined by the framebuffer reprojection.
These imperfections result in smoothed out contact
shadows, but on the visible part of the volume are cor-
rected by the reprojectionof the framebuffer. Any fur-
ther imperfections in the invisible parts of the scene
do not produce any objectionable errors in the illumi-
nation, and they are mostly unnoticeable in the final
textured image.
Figure 5 illustrates how the volume resolution af-
fects the final image quality on the room scene. We
can see that when the volume resolution is insuffi-
cient, small scale details like the contact shadows of
the table, are lost. Figure 6 shows several shots of the
knossos scene, using ambient occlusion and diffuse
Figure 5: Left: Ambient occlusion on the room scene.
Right: Small scale details are lost when using insufficient
volume resolution.
global illumination.
4.1 Discussion and Limitations
Since our method operates in voxel space, the perfor-
mance is mostly independent of the final image reso-
lution. The performance and quality depends on the
number of points generated per triangle, the number
of rays traced per voxel, the step size when traversing
the volume and the volume resolution.
Since even perfect voxelization is a rough approx-
imation of the scene geometry, GI from small scale
geometric details cannot be reproduced accurately. A
multi-scale approach like the cascaded volumes (Ka-
planyan and Dachsbacher, 2010) could be applied to
alleviate this problem. Also, we have observed some
temporal aliasing in the resulting illumination, as the
state of the voxels changes from occupied to unoccu-
pied. One way to counter this phenomenon is to sam-
ple the radiance at more positions inside the voxels,
and not just the centers.
5 CONCLUSIONS
We have presented a method for the real-time compu-
tation of ambient occlusion and diffuse indirect light
transport in fully dynamic scenes. Our method op-
erates on a rough approximation of the entire scene,
created by a fast point-based vozelization algorithm.
Although this algorithm does not give any hard guar-
antees about the quality of the voxelization, we have
demonstrated that potential errors introduced by the
imperfections in the volume are small and that our
method always maintains an interactive frame rate in
a variety of test cases.
GRAPP 2011 - International Conference on Computer Graphics Theory and Applications
164

Figure 6: Several shots from of the knossos scene, showcasing ambient occlusion (left and right) and global illumination
using three bounces (middle).
REFERENCES
Akenine-M¨oller, T., Haines, E., and Hoffman, N. (2008).
Real-Time Rendering 3rd Edition. A. K. Peters, Ltd.,
Natick, MA, USA.
Dachsbacher, C. and Stamminger, M. (2005). Reflective
shadow maps. In Proceedings of the 2005 ACM Sym-
posium on Interactive 3D Graphics and Games, pages
203–231. ACM SIGGRAPH.
Dachsbacher, C. and Stamminger, M. (2006). Splatting in-
direct illumination. In Proceedings of the 2006 Sym-
posium on Interactive 3D Graphics and Games, pages
93–100. ACM SIGGRAPH, ACM Press.
Eisemann, E. and D´ecoret, X. (2008). Single-pass gpu solid
voxelization for real-time applications. In GI ’08:
Proceedings of graphics interface 2008, pages 73–80.
Canadian Information Processing Society.
Jensen, H. W. (1996). Global Illumination Using Photon
Maps. In Rendering Techniques ’96 (Proceedings of
the Seventh Eurographics Workshop on Rendering),
pages 21–30. Springer-Verlag/Wien.
Kajiya, J. T. (1986). The Rendering Equation. In Com-
puter Graphics (ACM SIGGRAPH ’86 Proceedings),
volume 20, pages 143–150.
Kaplanyan, A. and Dachsbacher, C. (2010). Cascaded light
propagation volumes for real-time indirect illumina-
tion. In I3D ’10: Proceedings of the 2010 ACM SIG-
GRAPH symposium on Interactive 3D Graphics and
Games, pages 99–107, New York, NY, USA. ACM.
Keller, A. (1997). Instant radiosity. In Computer Graph-
ics (ACM SIGGRAPH ’97 Proceedings), volume 31,
pages 49–56.
Kˇriv´anek, J., Gautron, P., Pattanaik, S., and Bouatouch, K.
(2005). Radiance caching for efficient global illumi-
nation computation. IEEE Transactions on Visualiza-
tion and Computer Graphics, 11(5).
McGuire, M. and Luebke, D. (2009). Hardware-accelerated
global illumination by image space photon map-
ping. In Proceedings of the 2009 ACM SIG-
GRAPH/EuroGraphics conference on High Perfor-
mance Graphics, New York, NY, USA. ACM.
Nijasure, M., Pattanaik, S., and Goel, V. (2004). Real-time
global illumination on the GPU. Journal of Graphics
Tools, 10(2).
Papaioannou, G., Menexi, M. L., and Papadopoulos, C.
(2010). Real-time volume-based ambient occlusion.
IEEE Transactions on Visualization and Computer
Graphics, 99(RapidPosts).
Ramamoorthi, R. and Hanrahan, P. (2001). An efficient
representation for irradiance environment maps. In
SIGGRAPH ’01: Proceedings of the 28th annual con-
ference on Computer graphics and interactive tech-
niques, pages 497–500, New York, NY, USA. ACM.
Ritschel, T., Englehardt, T., Grosch, T., Seidel, H.-P., Kautz,
J., and Dachsbacher, C. (2009a). Micro-rendering for
scable, parallel final gathering. ACM Transactions on
Graphics (Proc. SIGGRAPH Asia 2009), 28(5).
Ritschel, T., Grosch, T., Kim, M. H., Seidel, H.-P., Dachs-
bacher, C., and Kautz, J. (2008). Imperfect shadow
maps for efficient computation of indirect illumina-
tion. ACM Transactions on Graphics, 27(5).
Ritschel, T., Grosch, T., and Seidel, H.-P. (2009b). Approx-
imating dynamic global illumination in image space.
In Proc. ACM Symposium on Interactive 3D Graphics
and Games 2009 (I3D ’09).
Shanmugam, P. and Arikan, O. (2007). Hardware acceler-
ated ambient occlusion techniques on gpus. In I3D
’07: Proceedings of the 2007 symposium on Interac-
tive 3D graphics and games, pages 73–80. ACM.
Walter, B., Fernandez, S., Abree, A., Bala, K., Onikian, M.,
and Greenberg, D. P. (2005). Lightcuts: A scalable
approach to illumination. In ACM SIGGRAPH 2005
Full Conference DVD-ROM, pages 1098–1107.
Wang, R., Wang, R., Zhou, K., Pan, M., and Bao, H.
(2009). An efficient GPU-based approach for inter-
active global illumination. volume 28.
Ward, G. J., Rubinstein, F. M., and Clear, R. D. (1988). A
Ray Tracing Solution for Diffuse Interreflection. In
Computer Graphics (ACM SIGGRAPH ’88 Proceed-
ings), volume 22, pages 85–92.
GLOBAL ILLUMINATION USING IMPERFECT VOLUMES
165
