
IDENTIFICATION AND RECONSTRUCTION OF COMPLETE GAIT
C
YCLES FOR PERSON IDENTIFICATION IN CROWDED SCENES
Martin Hofmann, Daniel Wolf and Gerhard Rigoll
Institute for Human-Machine Communication, Technische Universit¨at M¨unchen
Arcisstr. 21, Munich, Germany
Keywords:
Gait recognition, Person identification, Occlusions, Gait cycle reconstruction, Graph cuts.
Abstract:
This paper addresses the problem of gait recognition in the presence of occlusions. Recognition of people
using their gait has been an active research area and many successful algorithms have been presented. However
to this point non of the methods addresses the problem of occlusion. Most of the current algorithms need a full
gait cycle for recognition. In this paper we present a scheme for reconstruction of full gait cycles, which can be
used as preprocessing step for any state-of-the-art gait recognition method. We test this on the TUM-IITKGP
gait recognition database and show a significant performance gain in the case of occlusions.
1 INTRODUCTION
Person identification using gait information has be-
come an established field of research. In order to
identify people, current applications successfully use
physiologic features such as face, iris and fingerprint.
However it is also possible to detect people using be-
havior based features such as voice, dialect, signature
and gait. The main advantage of using gait features
over other features (like face, iris, fingerprint) is the
possibility to identify people from large distances and
without the person’s direct cooperation. For exam-
ple, in low resolution images, a person’s gait signa-
ture can be extracted, while the face is not even visi-
ble. Also no direct interaction with a sensing device
is necessary, which allows for undisclosed identifica-
tion. Thus gait recognitionhas great potential in video
surveillance, tracking and monitoring.
A major challenge for recognition of people using
gait is that almost all current approaches (Han and
Bhanu, 2006)(Lee and Grimson, 2001)(Wang et al.,
2003) need a sequence of the video, where a complete
gait cycle of the walking person is visible. A complete
gait cycle is a sequence starting with one foot forward
and ending with the same foot forward.
In most databases this is not a problem, because
the databases are constructed to always show the com-
plete gait cycles. However in actual real world ap-
plications, fully visible gait cycles can not always be
guaranteed. Assume for example an airport, a train
station or other crowded places. In these scenarios,
the gait cycles can be corrupted due to occlusions by
other walking pedestrians. Current approaches fail in
these cases.
We thus present a method to overcome these lim-
itations. Therefore we propose a preprocessing stage,
which effectively performs motion segmentation on
the input video and reconstructs synthetic complete
gait cycles using partial information available from
the corrupted and occluded input sequences.
In principle our methods consists of two separate
parts: First, all walking people are detected, tracked
and accurately segmented. Thus the first part can be
thought of as an application of motion segmentation.
Once people are segmented in each frame, in the sec-
ond part, the gait cycle of each person can be analyzed
and complete gait cycles can be reconstructed.
We test our method on the TUM-IITKGP gait
recognition database (Hofmann et al., 2011). This
database features sequences where each person is
completely visible and other sequences where each
person is occluded by other pedestrians. On the two
baseline algorithms, we show that our preprocessing
greatly increases recognition results in the case of oc-
clusions.
In Section 2 and 3 we present the two processing
parts. We show results in Section 4 and we conclude
in Section 5.
594
Hofmann M., Wolf D. and Rigoll G..
IDENTIFICATION AND RECONSTRUCTION OF COMPLETE GAIT CYCLES FOR PERSON IDENTIFICATION IN CROWDED SCENES.
DOI: 10.5220/0003329305940597
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2011), pages 594-597
ISBN: 978-989-8425-47-8
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

2 PERSON TRACKING
AND SEGMENTATION
In this section we present our motion segmentation
method, which is used to detect, track and accurately
segment a varying number of people in the input
videos.
We use a graph based image segmentation tech-
nique. Here an image is represented as an undirected
graph. Nodes correspond to pixels and a cut through
connecting edges reveils the segmentation. A simi-
lar approach for motion segmentation is for example
(Bugeau and P´erez). Our approach, however, is dif-
ferent in that we incorporate an explicit counting of
people using mean shift.
We define P the set of all pixels in a frame and
L the set of possible labels. We denote by l(p) ∈ L
the labeling for a specific pixel p ∈ P and l(P) =
{l(p)|p ∈ P } the set of all label assignments. N
denotes the standard 4-connected neighborhood and
consists of the corresponding pixel pairs (p, q). With
these definitions, the Energy definition becomes:
C(l(P)) =
∑
p∈P
C
D
ata
(l(p))
+ γ·
∑
(p,q)∈N
C
S
mooth
(l(p), l(q))
+ δ·C
Labels
(l(P )) (1)
The data term describes of assigning labels to indi-
vidual nodes. The smoothness term ensures smooth-
ness of the resulting objects and the label term dis-
courages the use of too many (small) objects. The
data and smoothness term are explained in detail be-
low, the label term C
Labels
= |L
′
| is the number of la-
bels used in the final assignment.
2.1 Data Term
The data term C
Data
(l(p)) describes the costs asso-
ciated with assigning label l(p) to pixel p. In our
work, the data term consists of a term defined by
background subtraction and a term defined by optical
flow.
C
Data
(l(p)) = α ·C
BS
(l(p)) +C
OF
(l(p)) (2)
For the background model, we use the first frame
of the sequence (which is always empty in the used
database). We use the YCbCr color space and take
the absolute difference in intensity I(p) as the mea-
sure. We do efficient shadow suppression by setting
I(p) = 0 (thus background) for pixels, whose Cr and
Cb values are similar to the background model but
Figure 1: Predicting label assignment using optical flow.
may have a significant intensity difference. Let l
H
be
the label of the background and L
V
be the set of all
other labels representing people. Then the costs for
labeling pixel p with label l becomes
C
BS
(l(p)) =
(
I(p) f¨ur l = l
H
(1− I(p)) f¨ur l ∈ L
V
(3)
The background term C
BS
described above is able
to separate background from moving objects, how-
ever naturally it is not possible to distinguish between
multiple walking people. Thus we additionally incor-
porated an optical flow term C
OF
, which (1) separates
objects moving in different directions and at the same
time (2) ensures consistent tracking of objects (i.e.
keeping the objects identity)
We first apply mean shift clustering on the out-
put from optical flow (Farneb¨ack, 2002). This not
only finds the number of objects in the frame, but
also gives a rough estimate on where the respective
objects can be found. More specifically we use a 3-
dimensional mean shift, with x, y and φ dimensions.
Here φ correspondsto the direction of the flow at pixel
p. We set the size of the used mean shift vector to ap-
proximately the expected height and width of a person
([80 × 200] Pixels), as well as 80
◦
for the flow direc-
tion.
Because the mean shift clustering is independent
from previous frames, the labels from the mean shift
clustering are arbitrary and have to be matched to the
labeling of the energy formulation. This is illustrated
in Figure 1. First, a predicted labeling is calculated
from the previous frame using the optical flow esti-
mate v(p) at each pixel:
ˆ
l(p + v(p)) = l(p). Then
each mean shift cluster is assigned the label which
best fits to the predicted labellings.
Let P
l
be the set of pixels in the mean shift cluster
which best fits the original pixels in cluster l. Then
the contribution to the data term is defined as
C
OF
(l(p)) =
(
−β f¨ur p ∈ P
l
0 sonst
(4)
Thus, assigning a given label is encouraged by β,
if a corresponding object has been found by the mean
shift clustering.
IDENTIFICATION AND RECONSTRUCTION OF COMPLETE GAIT CYCLES FOR PERSON IDENTIFICATION IN
CROWDED SCENES
595

2.2 Smoothness Term
The smoothness term models the similarity of the
color of adjacent pixels p
1
and p
2
. We set it as fol-
lows:
C
Smooth
(l(p
1
), l(p
2
)) =
(
0 l(p
1
) = l(p
2
)
e
−
kc(p
1
)−c(p
2
)k
2
σ
2
l(p
1
) 6= l(p
2
)
(5)
Here, c(p
i
) is the color vector of pixel p
i
.
2.3 Energy Minimization
For minimizing the energy of 1, we use the α-
expansion algorithm (Boykov et al., 2001)(Kol-
mogorov and Zabih, 2004) including label term (De-
long et al., 2010). Thus we seek to find the optimal
labeling
ˆ
l(P) = argminC(l(P )).
3 GAIT RECONSTRUCTION
The second part of the paper describes how to de-
tect occlusions and how to compensate for them. The
main idea is to replace silhouettes, which are com-
pletely or partly occluded, by silhouettes from other
frames, which are not occluded. To this end, two steps
are necessary: First all silhouettes which are occluded
are found. Then the gait period is calculated and lastly
so called ”reconstruction frames” are searched and
used to replace the corrupted silhouettes.
3.1 Detection of Occlusions
A good feature to detect occluded frames is the num-
ber of pixels in the silhouette. Figure 2 shows the
number of pixels in a tracked silhouette. It can be
seen that frames between 145 and 150 are definitely
occluded. In order to find the precise range of oc-
cluded frames we first calculate the median M
P
of
pixels. Silhouettes which have less than
1
2
· M
P
pix-
els are definitely occluded. From these silhouettes we
search backward and forward until the number of pix-
els goes above0.95·M
P
and all pixels in this range are
also considered part of the occluded range.
3.2 Measuring the Gait Period
For the last step of finding reconstruction frames, it is
necessary to have a good estimate of the gait period
T. In order to find the gait period, for each frame,
the lower half of the silhouette is correlated with the
lower parts of the silhouettes in all other frames. The
difference in frame number to the frame with the best
0
2000
4000
6000
8000
10000
12000
number of pixels
100 110 120 130 140 150 160 170 180 190 200
frame number
number of pixels
nr of pixels
median
Figure 2: Number of pixels in a silhouette.
match is recorded in a list. The median frame differ-
ence in this list yields the gait period we are looking
for. This relatively simple method performs very re-
liably and correctly finds the gait period for all the
sequences in the database.
3.3 Finding Reconstruction Frames
The goal is to reconstruct the silhouettes which are
corrupted by occlusions. The procedure is best de-
scribed using Figure 3. Here, frames 48-50 (red) are
the occluded frames which are to be reconstructed.
We seek to find silhouettes from other frames which
are similar to the occluded ones. This is possible, be-
cause it can be assumed that the sequence consists of
multiple gait cycles, which are very similar to each
other. Thus the corrupted frames can be replaced by
corresponding frames from another gait cycle. Of
course, the corrupted frames themselves cannot be
used to find corresponding frames. Thus we take the
last non-corrupted frame (frame 47 in Figure 3) and
search for a best match using normalized correlation.
It is important to note that this search may not be
performed on all other available frames, but only on
those which are in a search region, either one or more
gait periods ahead or in the past. This is necessary
to avoid incorrect matches for example to a silhouette
where the opposite foot is extended. Thus, the possi-
ble search ranges are S
k
= [kT − ∆, kT + ∆], ∀k 6= 0.
Once the best matching frame is found, the corre-
sponding frames are copied to replace the corrupted
frames.
one gait period back
one gait period forward
regular framesearch window
search window
last non-occluded frame
occluded frames
Figure 3: Search area for finding the reconstruction frames.
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
596
4 RESULTS
To our knowledge, not much work has focused on
gait recognition in the presence of occlusions. How-
ever it is a very important issue when moving to-
wards a real working gait recognition system. There
are many gait recognition databases, e.g. HumanID,
UCSD, CMU Mobo, Soton, CASIA, and others (Hof-
mann et al., 2011). We use the TUM-IITKGP gait
recognition database (Hofmann et al., 2011), because
it focuses on gait recognition with occlusions. This
database features 35 individuals which are recorded
in six different configurations (Regular, hands-in-
pocket, backpack, gown, dynamic occlusions, static
occlusions). In this paper we use the first configura-
tion for training and focus on the last two configura-
tions for recognition. For all our experiments we set
[α = 200, β = 80, γ = 30, δ = 40.000].
We compare our results to the two baseline algo-
rithms described in (Hofmann et al., 2011). In Table
1 evaluation results are shown. The first algorithm
(based on color histograms) is clearly outperformed.
The second baseline algorithm (based on Gait Energy
Image) could not work without the preprocessing we
propose in this paper.
Table 1: Top 1 recognition rates for Baseline 1 (Color His-
togram) and Baseline 2 (Gait Energy Image).
dynamic
occlusions
static
occlusions
Baseline 1 43.7% 70.0%
Baseline 1 + ours 84.3% 87.5%
Baseline 2 - -
Baseline 2 + ours 67.2% 72.7%
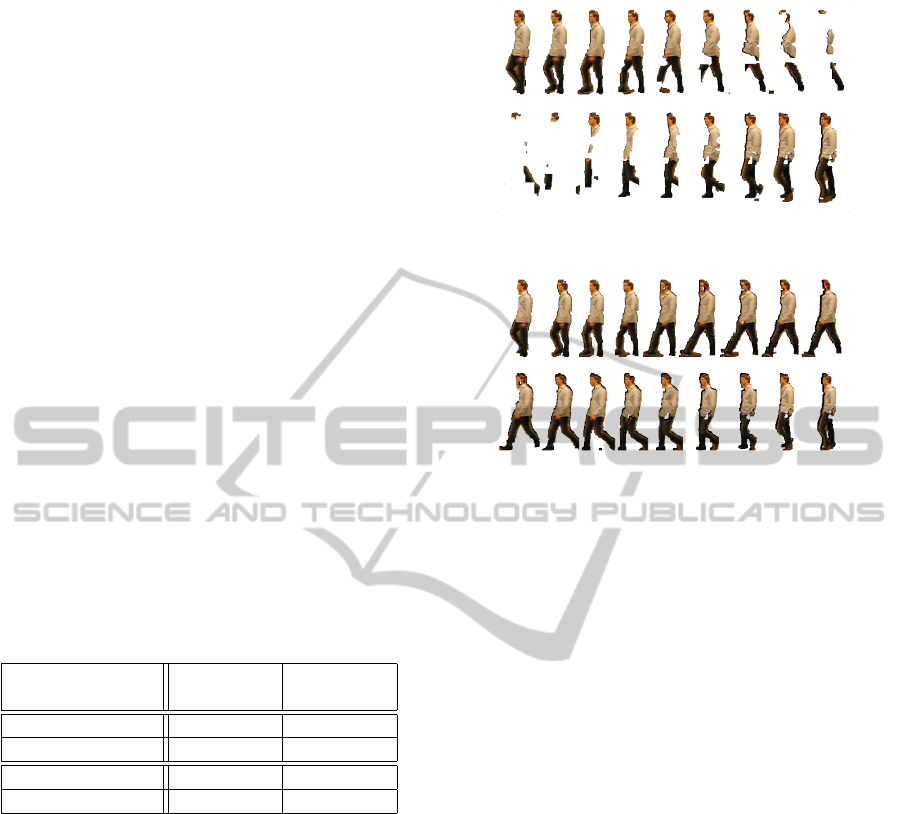
Qualitative results of our proposed reconstruction
method are shown in Figure 4. It can be seen that the
corrupted sequence is nicely reconstructed.
5 CONCLUSIONS
In this paper we have shown a preprocessing stage
that allows to reconstruct complete gait cycles such
that gait recognition is possible in spite of occlusions.
In principle this preprocessing can be applied to any
gait recognition algorithm. In our experiments we
have shown that a preprocessing like ours is in fact
beneficial in the case of occlusions.
(a) Sequence with occlusions
(b) Reconstructed sequence
Figure 4: Example of reconstruction (b) of gait cycle which
was originally (a) corrupted by occlusions.
REFERENCES
Boykov, Y., Veksler, O., and Zabih, R. (2001). Efficient ap-
proximate energy minimization via graph cuts. IEEE
TPAMI, Number 20(12):1222-1239.
Bugeau, A. and P´erez, P. Track and cut: Simultaneous
tracking and segmentation of multiple objects with
graph cuts.
Delong, A., Osokin, A., Isack, H. N., and Boykov, Y.
(2010). Fast approximate energy minimization with
label costs. CVPR.
Farneb¨ack, G. (2002). Polynomial Expansion for Orienta-
tion and Motion Estimation. PhD thesis, Link¨oping
University, Sweden.
Han, J. and Bhanu, B. (2006). Individual recognition using
gait energy image. IEEE TPAMI, Volume 28, Number
2.
Hofmann, M., Sural, S., and Rigoll, G. (2011). Gait recog-
nition in the presence of occlusion: A new dataset and
baseline algorithms. In International Conferences on
Computer Graphics, Visualization and Computer Vi-
sion (WSCG).
Kolmogorov, V. and Zabih, R. (2004). What energy func-
tions can be minimized via graph cuts? IEEE TPAMI,
Number 26(2):147-159.
Lee, L. and Grimson, W. E. L. (2001). Gait analysis for
recognition and classification. MIT Artificial Intelli-
gence Lab, Cambridge.
Wang, L., Tan, T., Ning, H., and Hu, W. (2003). Silhouette
analysis-based gait recognition for human identifica-
tion. IEEE TPAMI, Vol. 25, No. 10.
IDENTIFICATION AND RECONSTRUCTION OF COMPLETE GAIT CYCLES FOR PERSON IDENTIFICATION IN
CROWDED SCENES
597
