
A Mobile Robotic Platform for Elderly Care
Jo˜ao Cunha, Ant´onio J. R. Neves, Jos´e Luis Azevedo, Bernardo Cunha, Nuno Lau
Artur Pereira and Ant´onio Teixeira
Transverse Activity on Intelligent Robotics, IEETA / DETI University of Aveiro
3810-193 Aveiro, Portugal
Abstract. This paper presents the proposal of a robotic platform for elderly care
integrated in the Living Usability Lab for Next Generation Networks. The project
aims at developing technologies and services tailored to enable the active aging
and independent living of the elderly population. The proposed robotic platform
is based on the CAMBADA robotic soccer platform, with the necessary modifi-
cations, both at hardware and software levels, while simultaneously applying the
experiences achieved in the robotic soccer environment.
1 Introduction
Current societies in developed countries face a serious problem of aged population.
The growing number of people with reduced health and capabilities, allied with the fact
that elders are reluctant to leave their own homes to move to nursing homes, requires
innovative solutions since continuous home care can be very expensive and dedicated
24/7 care can only be accomplished by more than one care-giver.
Technology directed to this section of the population can play a major role in im-
proving their quality of life, enabling and fostering active aging without leaving their
homes. In particular, information and communications technology can provide a va-
riety of services to the elder population. With the large bandwidth available in Next
Generation Networks (NGN) new services become available in areas such as Health
and Ambient Assisted Living, like high definition video transmission from multiple
cameras or monitoring of biologic signals from body sensors.
In the context of this scenario the introduction of a mobile robotic platform could
be an asset, by complementing and enhancing the deployed infrastructure, as a robot
can be a mobile monitoring agent, for instance by providing images from spots that are
occluded from the house cameras, as well as helping to reduce the feeling of loneliness
that often affects the elderly, when endowed by means of human interaction.
This paper presents a project to adapt a robotic soccer platform based on CAM-
BADA
1
platform to perform in a home environment. We discuss the main goals by the
robotic platform and we present some of the work already developed. The CAMBADA
project started in 2003 in the Department of Electronic, Telecommunications and In-
formatics (DETI) and the Institute of Electronic and Telematics Engineering of Aveiro
1
www.ieeta.pt/atri/cambada
Cunha J., J. R. Neves A., Luis Azevedo J., Cunha B., Lau N., Pereira A. and Teixeira A..
A Mobile Robotic Platform for Elderly Care.
DOI: 10.5220/0003338400360045
In Proceedings of the 1st International Living Usability Lab Workshop on AAL Latest Solutions, Trends and Applications (AAL-2011), pages 36-45
ISBN: 978-989-8425-39-3
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
(IEETA), both of the University of Aveiro, with the goal of developing a team of soccer
robots to compete in the RoboCup
2
Middle Size League (MSL).
The remaining of this paper is structured as follows: Section 2 presents the Living
Usability Lab for Next Generation Networks project. Section 3 discusses an overview
of the state of the art in service and elderly care robotics and some of the more relevant
projects in the area. Section 4 discusses the proposed robotic platform Living Usabil-
ity Lab for Next Generation Networks, the expected functions and goals, and a brief
description of previous projects and experiences that serve as a basis for the project.
Section 5 presents the conclusions.
2 The Living Usability Lab for Next Generation Networks
The aforementioned development of a robotic platform for elderly care is part of a
broaderproject named Living Usability Lab for Next Generation Networks
3
. The project
is a collaborative effort between the industry and the academy that aims to develop and
test technologies and services that give elderly people a quality lifestyle in their own
homes while remaining active and independent.
To enable active aging of the elder population, the different services provided make
use of the NGN infrastructure that offers large bandwidth transport technologies suit-
able for services such as image and voice transmission. This feature allows a thorough
analysis of the collected data to ultimately generate knowledge of the observed be-
haviors. This then allows a feedback on the developed services and technologies and
provides an opportunity for improvement.
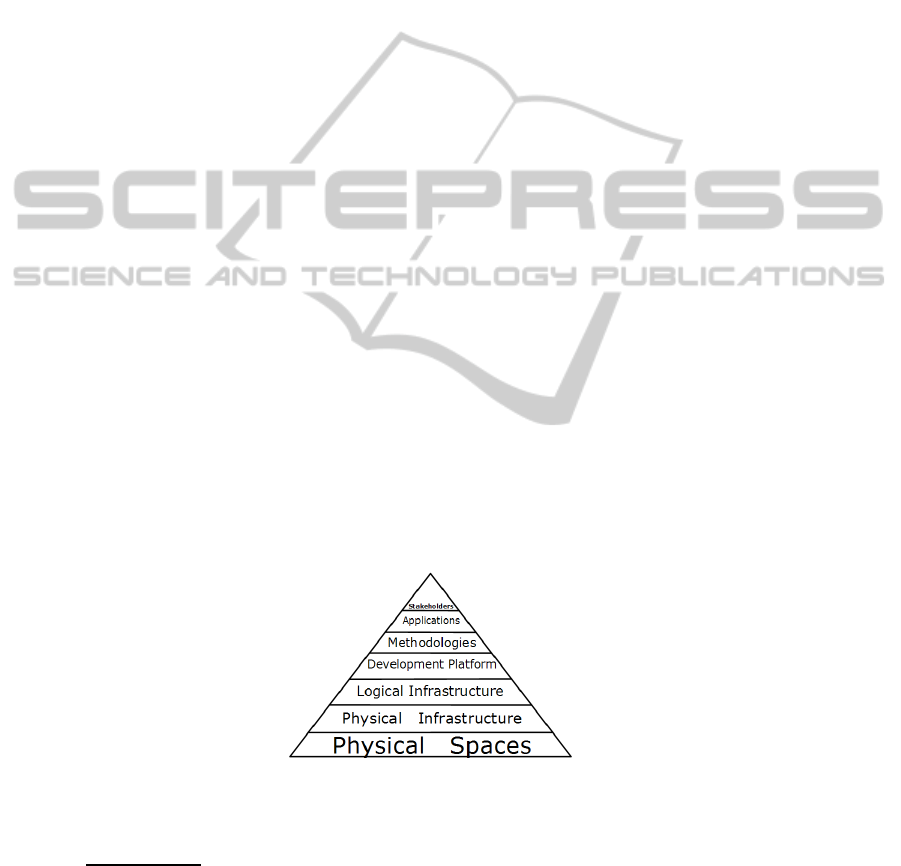
A Living Lab is not just a set of information services but a complex entity composed
by physical spaces and infrastructures (information and communication systems and
services, peripheral devices, development tools and methodologies for analysis, spec-
ification, evaluation, validation and dissemination of the results) and requires intense
involvement of stakeholders (whether they are, for instance, end users, professionals,
researchers or students) to allow the research and development, in continuum, of new
technologies and services, as described in Fig. 1.
Fig.1. The conceptual model of the LUL project.
2
www.robocup.org
3
www.livinglab.pt
37

3 Domestic Robotic Assistants
Ever since the first robots were created, researchers have tried to integrate robots in our
daily lives. In particular, domestic assistants have been a constant driving goal in the
area, where robots are expected to perform dull daily chores in a home environment.
We can all certainly remember examples in the science-fiction universe, like the famous
Jetsons robot maid, Rosie.
While some simpler forms of domestic robots, such as vacuum cleaner robots, are
increasingly becoming part of our everyday life, robots designed for human care are far
from commercialization. Meanwhile, a large number of this type of robots have been
developed over decades by academies and research groups. The results and insights
obtained through the conducted experiences will undoubtedly shape the care robots
of tomorrow in fields such as Face Recognition, Speech Recognition, Sensor Fusion,
Navigation, Manipulation, Artificial Intelligence and Human-Robot Interaction to name
a few.
Among others, the following robots deserve a particular mention:
Asimo the famous robot from Honda, is arguably the most advanced humanoid like
robot ever. Designed to be an all-purpose robot, it can perform care tasks such as
deliver goods or carry objects by pushing a trolley in an indoor environment [1].
Care-O-Bot a highly advanced domestic care robot developed by the Fraunhoffer In-
stitute. Equipped with a robotic arm the robot can perform manipulation tasks such
as hand out beverages and open doors. The robot is being experimentally applied
in elder-care facilities [2].
Flo and Pearl two robots developed in the Nursebot project [3][4]. The robots were
designed with the specific purpose of providing assistance to elders both in the
elder home or in a nursing home. Pearl, more recent than Flo, has the additional
ability to provide reminders about daily activities.
PR2 a recent, very advanced wheeled robot, developed by Willow Garage. PR2 can
produce a 3D mapping of the surrounding [5], which is very important given that
objects such as tables or open drawers, that are common in a household environ-
ment, are often unnoticed using traditional 2D mapping.PR2 can also performcom-
plex manipulation tasks such as opening a closed door, retrieve an item from the
refrigerator or plug-in itself to electrical outlets to charge its batteries [6], achieving
therefore a higher degree of autonomy.
RIBA a bear-like robot developed in Japan. RIBA is the first robot that can lift up or
set down a real human from or to a bed or wheelchair [7].
Studies show [8] that in rehabilitation scenarios, robots are well received and have
a positive impact in the patient willingness to perform prescribed exercises. Further-
more, a physically embodied robot produces a better response than simulation or tele-
rehabilitation robots. However, robots designed for elderly care should follow careful
design rules in order to be accepted by a section of the population that may not be re-
ceptive or accustomed to technology. Research shows that elderly people prefer light
colored robots, medium sized (around 1.25 meters high) [9]. Interestingly, in the same
study, elderly people preferred a wheeled robot over a legged robot. One may argue
38

that elderly people are increasingly affected by the uncanny valley effect [10], and thus
prefer a more machine-like appearance.
Although the physical shape can influence the robot acceptance, the robot interac-
tion skills and social competence can outweigh the appearance factor [11]. On the other
hand, it is not recommended to make the robot as socially advanced as possible. In gen-
eral, a robot should match the human’s expectations and the application requirements
[12].
The fact that a large number of robotic assistants started being proposed two decades
ago while no commercialapplication ever developedmeans the problem remains largely
unsolved today.
4 Proposed Robotic Assistant
The DETI and IEETA have been developing, for many years, a significant activity in
the context of mobile robotics. One of the most visible projects that has resulted from
this activity is the robotic soccer team CAMBADA.
In this paper we propose the adaptation of robotic soccer robot to help and safely
coexist with an elderly person in a home environment, using the experiences obtained
in the CAMBADA project.
The CAMBADA project provided vast experience in areas such as Machine Vision,
Perception, Navigation, Robot Software Architecture and Cooperation. This experience
is reflected in the series of positive results achieved in recent years. The CAMBADA
team won the last four editions of the Portuguese National Championship, placed sec-
ond in the 2010 European Championship and placed third in 2009 and 2010 World
Championship while winning the world title in 2008. The vast number of publica-
tions produced also reflects the quality of the CAMBADA project, to name a few
[13][14][15][16].
There is no better proof of the successful application of soccer robots in home envi-
ronments than the RoboCup@Home
4
league. This league was created in 2006 from the
need to place more emphasis on real world problems, not addressed in robotic soccer
[17]. This league is currently the largest league of the RoboCup initiativeand includes
a vast number of teams that started as soccer teams and then evolved to this robotic
paradigm.
Although a shift from the robotic soccer environment many of the problems address
in the RoboCup@Home league can be, and have been, solved[19] by teams coming the
robotic soccer leagues, using the experience learned in that competition.
4.1 Architecture
The CAMBADA robots were designed and built at the University of Aveiro. The hard-
ware is distributed in three layers which facilitate replacement and maintenance.
The top layer has the robots vision system. The CAMBADA robots have an omni-
directional vision obtained by means of a CCD camera pointed upwards towards an
hyperbolic mirror which enables a robot to see in 360 degrees[20][21].
4
www.robocupathome.org
39

Fig.2. The participating robots in the 2009 edition of the RoboCup@Home competition, adapted
from [18].
Fig.3. The CAMBADA robot.
The middle layer houses the processing unit, currently a 12” laptop, which collects
the data from the sensors and computes the commands provided to the actuators. The
laptop executes the vision software along with all high level and decision software and
can be seen as the brain of the robot. Given the positional advantage, a ball retention
device is placed on this layer.
Beneath the middle layer, a network of micro-controllers is placed to control the
low-level sensing/actuation system, or the nervous system of the robot. In order to
comply with real-time constraints the FTT-CAN
5
protocol is used[22]. The sensing and
actuation system is highly distributed, meaning that each node in the network controls
different functions of the robot, such as, motion, odometry, kick, compass and system
monitor.
The lower layer is composed by the robot motion system and kicking device. The
robots move with the aid of a set of three omni-wheels, disposed at the periphery of the
robot at angles that differ 120 degrees from each other, powered by three 24 V / 150
5
Flexible Time-Triggered communication over CAN
40

W motors. On this layer there is also an electromagnetic kicking device. Also, for ball
handling purposes, a barrier sensor is installed underneath the robots base, that signals
the higher level that the ball is under control.
Following the CAMBADA hardware approach, the software is also distributed.
Therefore, five different processes are executed concurrently. All the processes run at
the robots processing unit using the Linux OS.
All processes communicate by means of an RTDB
6
which is physically imple-
mented in shared memory. The RTDB is a data structure which contains the essential
state variables to control the robot. The RTDB is divided in two regions, the local and
shared regions.
The local section holds the data needed by the local processes and is not to be
broadcasted to the other robots. The shared section holds the data of the state of the
world as perceived by each running agentof the the team. Each sub-divided area is
allocated to one robot where it stores the perceived state of the world. There is also
one sub-divided area specific for the coach information. As the name implies the shared
section is broadcasted through the team, as each agent transmits the owned sub-divided
shared section, achieving information sharing between the team.
The RTDB implementation guarantees the temporal validity of the data, with small
tolerances [23].
The processes composing the CAMBADA software are:
Vision which is responsible for acquiring the visual data from the cameras in the vision
system, processing and transmitting the relevant info to the CAMBADA agent.
The transmitted data is the position of the ball, the lines detected for localization
purposes and obstacles positions. Given the well structured environment the robots
play in, all this data is currently acquired by color segmentation [20][24][13].
Agent is the process that integrates the sensor information and constructs the robot’s
worldstate. The agent then decides the command to be applied, based on the per-
ception of the worldstate, accordingly to a pre-defined strategy [25].
Comm that handles the inter-robot communication, receiving the information shared
by the team-mates and transmitting the data from the shared section of the RTDB
to the team-mates [26][27].
HWcomm or hardware communication process is responsible for transmitting the data
to and from the low-level sensing and actuation system.
Monitor that checks the state of the remaining processes relaunching them in case of
abnormal termination.
Given the real-time constraints, all process scheduling is handled by a library specif-
ically developed for the task, pman, process manager [13].
4.2 Objectives
As stated before, the goal of this project is to develop a mobile robot designed to help
improve the quality of life of an elderly person in a household environment, ultimately
postponing the departure to a nursing home.
6
Real-Time DataBase
41
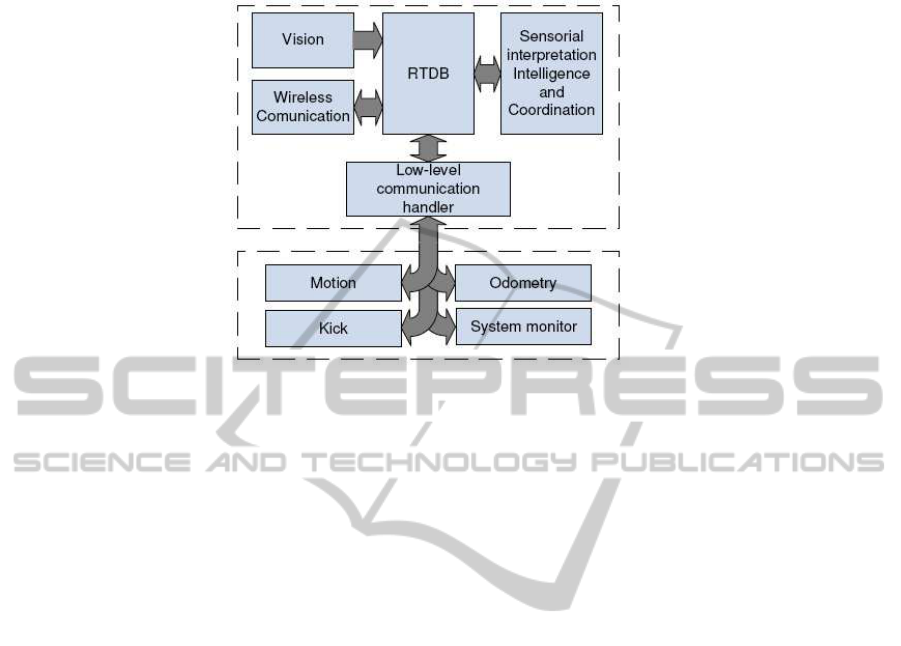
Fig.4. The software architecture of the CAMBADA robots, adapted from [28].
In order to achieve this goal, and because there is a broad range of possible actions
a robot can perform to improve the quality of life of an elderly person, some of the most
important tasks were chosen to be addressed by this project.
Therefore during the project we expect to develop a platform that is able to:
– be safe for users and the environment,
– avoid dynamic and static obstacles,
– dispense or remind the elder to take medication,
– output audio and video,
– receive information from external sensors,
– dock in a charging station when batteries are low,
– execute external orders,
– follow a human and answer when called.
4.3 First Results
The developed work until now, focused on the following topics:
– integration of aditional hardware, namely a laser range finder which is the main
source of sensorial information to produce environment maps used for localization
and navigation, and stereo vision cameras to complement the omni-vision system
of the CAMBADA robots;
– development of machine vision algorithms for recognition of objects present in a
home environment;
– initial design of a medication dispenser suitable for both a mobile robotic applica-
tion and elderly care,
– redesign of the robot control architecture to achieve an easy behaviour scalabil-
ity, to transparently develop behaviours for different environments such as home
applications or robotic soccer;
42
– design and implementation of algorithms for indoor localization, using internal and
external cameras to the robot,
– development of new motor controllers electronic boards, allowing a broader variety
motors used in the robot;
– implementation of software for hardware communications, to enable the interac-
tion of the high-level software modules with the different hardware available in the
robot, such as the laser-range finder information and the odometry;
– algorithms for worldstate-modelling based on sensor and information fusion, to
produce a better estimation of the observed environment by the robot;
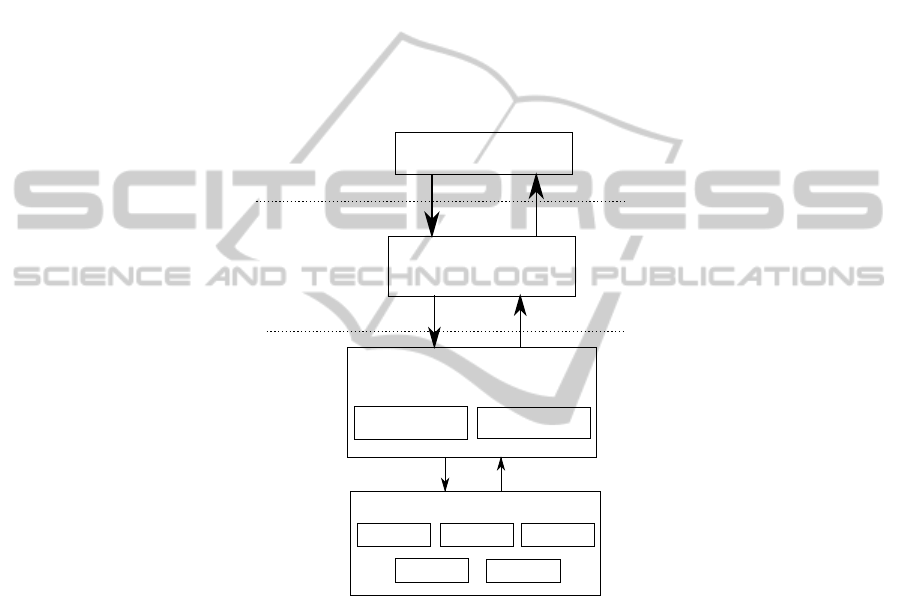
– design of the system architecture where the tasks with heavy computational weight
are executed on processing units external to the robot. The external computer also
serves as the interface with the Living Usability Lab, consuming and providing
different services.
Internet
Services
LUL
Robot
System
External
Processor
Speech Synthesis/
Recognition
Elderly Localization
Robot
Vision
Microphone
Speakers
Motion
Medication
Fig.5. The proposed system architecture.
5 Conclusions
This paper presented the proposal of a robotic platform for elderly care. The develop-
ment of the robot is part of the Living Usability Lab for Next Generation Networks. The
paper discusses the motivations to increasingly apply robotic technology in home envi-
ronments near humans, particularly elder citizens. A brief overview of the state of the
art research was discussed such as the most important robots developed to date in this
field. Finally, the proposed platform objectives were presented along with the CAM-
BADA hardware and software architecture that serve as basis to the proposed platform
architecture.
43

Acknowledgements
This work is part of the Living Usability Lab for Next Generation Networks
(www.livinglab.pt) project, a QREN project, co-funded by COMPETE and FEDER.
References
1. : The New ASIMO - Major Features Summary. (http://www.hondauk-media.co.uk/uploads/
presspacks/bf27134f6692b1c050d8ae9c29bc21840af2a723/Major Features Summary.pdf)
Accessed in October 2010.
2. Graf, B., Reiser, U., H¨agele, M., Mauz, K., Klein, P.: Robotic home assistant care-o-bot
3 - product vision and innovation platform. In: IEEE / Robotics and Automation Society:
IEEE Workshop on Advanced Robotics and its Social Impacts - ARSO 2009 : Workshop
Proceedings, Tokyo, Japan (2009) 139–144
3. Baltus, G., Fox, D., Gemperie, F., Goetz, J., Hirsch, T., Magaritis, D., Montemerlo, M.,
Pineau, J., Roy, N., Schulte, J., Thrun, S.: Towards personal service robots for the elderly.
In: Proceeding of Workshop on Interactive Robots and Entertainment. (2000)
4. Pollack, M. E., Engberg, S., Matthews, J. T., Thrun, S., Brown, L., Colbry, D., Orosz,
C., Peintner, B., Ramakrishnan, S., Dunbar-Jacob, J., MacCarthy, C. R., Montemerlo, M.,
Pineau, J., Roy, N.: Pearl: A mobile robotic assistant for the elderly. In: AAAI Workshop on
Automation as Eldercare. (2002)
5. Marder-Eppstein, E., Berger, E., Foote, T., Gerkey, B. P., Konolige, K.: The office marathon:
Robust navigation in an indoor office environment. In: International Conference on Robotics
and Automation. (2010)
6. Meeussen, W., Wise, M., Glaser, S., Chitta, S., McGann, C., Mihelich, P., Marder-Eppstein,
E., Muja, M., Eruhimov, V., Foote, T., Hsu, J., Rusu, R. B., Marthi, B., Bradski, G., Konolige,
K., Gerkey, B. P., Berger, E.: Autonomous door opening and plugging in with a personal
robot. In: ICRA. (2010)
7. : Riba official page. (http://rtc.nagoya.riken.jp/RIBA/index-e.html) Accessed in October
2010.
8. Matari´c, M. J., Eriksson, J., Feil-Seifer, D. J., Winstein, C.J.: Socially assistive robotics for
post-stroke rehabilitation. International Jornal of NeuroEngineering and Rehabilitation 4
(2007)
9. Broadbent, E., Tamagawa, R., Kerse, N., Knock, B., Patience, A., MacDonald, B.: Re-
tirement home staff and residents’ preferences for healthcare robots. In: The 18th IEEE
International Symposium on Robot and Human Interactive Communication. (2009)
10. MacDorman, K. F., Ishiguro, H.: The uncanny advantage of using androids in cognitive and
social science research. Interaction Studies 7 (2006) 297–337
11. Matari´c, M. J., Tapus, A.: The promises and challenges of socially assistive robotics. In:
50th Anniversary AI summit. (2006)
12. Fong, T., Nourbakhsh, I., Dautenhaln, K.: A survey of socially interactive robots. Robotics
and Autonomous Systems (2003)
13. Neves, A., Azevedo, J., B. Cunha, N. L., Silva, J., Santos, F., Corrente, G., Martins, D. A.,
Figueiredo, N., Pereira, A., Almeida, L., Lopes, L. S., Pedreiras, P.: 2. In: CAMBADA soccer
team: from robot architecture to multiagent coordination. I-Tech Education and Publishing,
Vienna, Austria (In Vladan Papic (Ed.), Robot Soccer, 2010)
14. Santos, F., Almeida, L., Lopes, L. S., Azevedo, J.L., Cunha, M. B.: Communicating among
robots in the robocup middle-size league. In: RoboCup 2009: Robot Soccer World Cup XIII.
Lecture Notes in Artificial Intelligence, Springer (2009)
44

15. Silva, J., Lau, N., Rodrigues, J., Azevedo, J.L., Neves, A.J.R.: Sensor and information fusion
applied to a robotic soccer team. In: RoboCup 2009: Robot Soccer World Cup XIII. Lecture
Notes in Artificial Intelligence, Springer (2009)
16. Lau, N., Lopes, L.S., Corrente, G., Filipe, N.: Multi-robot team coordination through roles,
positioning and coordinated procedures. In: Proc. of the IEEE/RSJ International Conference
on Intelligent Robots and Systems, St. Louis, MO, USA (2009) 5841–5848
17. van der Zant, T., Wisspeintner, T.: Robocup x: A proposal for a new league where robocup
goes real world. In Bredenfeld, A., Jacoff, A., Noda, I., Takahashi, Y., eds.: RoboCup 2005:
Robot Soccer World Cup IX. Volume 4020 of Lecture Notes in Computer Science., Springer
(2005) 166–172
18. : The robocup@home 2009 family photo. (http://www.niemueller.de/blog/show.php?id=230)
Accessed in October 2010.
19. van der Zant, T., Wisspeintner, T.: Robocup@home: Creating and benchmarking tomorrows
service robot applications. In Lima, P., ed.: Robotic Soccer, Vienna: I-Tech Education and
Publishing (2007) 521–528
20. Neves, A., Corrente, G., Pinho, A.: An omnidirectional vision system for soccer robots. In:
Proc. of the EPIA 2007. Volume 4874 of Lecture Notes in Artificial Inteligence., Springer
(2007) 499–507
21. Cunha, B., Azevedo, J., Lau, N., Almeida, L.: Obtaining the inverse distance map from
a non-svp hyperbolic catadioptric robotic vision system. In: Proc. of the RoboCup 2007,
Atlanta, USA (2007)
22. Almeida, L., Pedreiras, P., Fonseca, J.: The FTT-CAN protocol: why and how. IEEE Trans-
actions on Industrial Electronics 49 (2002) 1189–1201
23. Almeida, L., Santos, F., Facchinetti, T., Pedreiras, P., Silva, V., Lopes, L.: Coordinating
distributed autonomous agents with a real-time database: The CAMBADA project. In: Proc.
of the ISCIS, Springer (2004)
24. Neves, A., Martins, D., Pinho, A.: A hybrid vision system for soccer robots using radial
search lines. In: Proc. of the 8th Conference on Autonomous Robot Systems and Competi-
tions, Portuguese Robotics Open - ROBOTICA’2008, Aveiro, Portugal (2008) 51–55
25. Lau, N., Lopes, L., Corrente, G.: Cambada: Information sharing and team coordination. In:
Proc. of the 8th Conference on Autonomous Robot Systems and Competitions, Portuguese
Robotics Open - ROBOTICA’2008, Aveiro, Portugal (2008) 27–32
26. Santos, F., Almeida, L., Pedreiras, P., Lopes, L., Facchinetti, T.: An Adaptive TDMA Pro-
tocol for Soft Real-Time Wireless Communication among Mobile Autonomous Agents. In:
Proc. of the Int. Workshop on Architecture for Cooperative Embedded Real-Time Systems,
WACERTS 2004. (2004)
27. Santos, F., Corrente, G., Almeida, L., Lau, N., Lopes, L.: Selfconfiguration of an Adaptive
TDMA wireless communication protocol for teams of mobile robots. In: Proc. of the 13th
Portuguese Conference on Artificial Intelligence, EPIA 2007. (2007)
28. Azevedo, J., Cunha, B., Almeida, L.: Hierarchical distributed architectures for autonomous
mobile robots: A case study. In: Proc. of the 12th IEEE Conference on Emerging Technolo-
gies and Factory Automation, ETFA 2007. (2007) 973–980
45
