
HEAD DETECTION IN STEREO DATA FOR PEOPLE COUNTING
AND SEGMENTATION
Tim van Oosterhout, Sander Bakkes and Ben Kr
¨
ose
CREATE-IT Applied Research, Amsterdam University of Applied Sciences (HvA)
Duivendrechtsekade 36-38, 1096 AH Amsterdam, The Netherlands
Keywords:
Head detection, People counting, People tracking, Stereo cameras.
Abstract:
In this paper we propose a head detection method using range data from a stereo camera. The method is
based on a technique that has been introduced in the domain of voxel data. For application in stereo cameras,
the technique is extended (1) to be applicable to stereo data, and (2) to be robust with regard to noise and
variation in environmental settings. The method consists of foreground selection, head detection, and blob
separation, and, to improve results in case of misdetections, incorporates a means for people tracking. It is
tested in experiments with actual stereo data, gathered from three distinct real-life scenarios. Experimental
results show that the proposed method performs well in terms of both precision and recall. In addition, the
method was shown to perform well in highly crowded situations. From our results, we may conclude that the
proposed method provides a strong basis for head detection in applications that utilise stereo cameras.
1 INTRODUCTION
Counting people from video streams is important in
many applications such as bottleneck detection, wait-
ing line measurement, interesting route detection and
measurement of social behaviour. Numerous methods
discussed in the literature are based on the assumption
that people can be segmented from the background by
means of appearance (Stauffer and Grimson, 1999)
or motion properties (Heisele and Woehler, 1998).
When people overlap in the image domain these blob
based segmentation methods do not give an accurate
count of the amount of people visible. To reduce over-
lap, cameras are mounted on the ceiling and are di-
rected straight or slanted down. Methods have been
proposed that use appearance cues in the 2D image
for head detection (Fu et al., 2007; Ishii et al., 2004;
Zhao and Nevatia, 2003). However, appearance meth-
ods are very sensitive to illumination conditions and
colour similarity between subject and background.
Systems with stereo cameras have been proposed
to solve a number of these shortcomings. A prob-
lem with object segmentation from stereo data is that
stereo range data is generally noisy and as a result
leads to incorrect segmentations. Moreover, even in
clean stereo data many stereo correspondence algo-
rithms produce artefacts known as foreground fat-
tening (Scharstein and Szeliski, 2002) which may
prevent nearby but separate objects from being cor-
rectly segmented. In this paper, we propose a tailored
method to robustly detect and count people using data
from stereo cameras. We extract features from the
noisy range data in the form of sphere-shaped objects.
We show that the method accurately performs head
detection in applications with stereo cameras.
2 RELATED WORK
An approach to people counting in stereo is project-
ing all observations to the ground plane resulting in
an occupancy map. (Beymer, 2000) uses a volume
of interest located at head height. Points in this vol-
ume are projected and binned to obtain the positions
of people. (Hayashi et al., 2004) use a full occupancy
map and correct for the fact that people that are further
away from the camera have less points by giving far
points more influence on the occupancy map. Other
segmenting methods in stereo include 3D clustering
and region growing (Kelly et al., 2009) and connected
component labelling based on depth layers combined
with skin hue detection (Darrell et al., 2000).
One common technique in head detection is to
look for an omega shaped contour in a 2D side-view.
(Zhao and Nevatia, 2003) use edge detection to ob-
tain the contours which are then matched against the
620
van Oosterhout T., Bakkes S. and Kröse B..
HEAD DETECTION IN STEREO DATA FOR PEOPLE COUNTING AND SEGMENTATION.
DOI: 10.5220/0003362806200625
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2011), pages 620-625
ISBN: 978-989-8425-47-8
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

omega shaped template. (Park and Aggarwal, 2000)
localise people in stereo, but use a partial ellipse fit-
ting technique to find heads. (Luo and Guo, 2001)
use stereo vision to segment the image into different
depth layers after which they fit a contour.
A number of approaches are based on finding el-
liptical shapes in 2.5D (range) or 3D (voxel) repre-
sentations. (Huang et al., 2004) uses scale-adaptive
filtering in the range domain to find elliptical objects
of predefined size. (Hoshino and Izumi, 2006) detect
circles in one image from a stereo pair and project
them onto the other to test hypotheses for their posi-
tions and radii. 3D data from multiple cameras can be
used for body part localization (Miki
´
c et al., 2003).
In our system we use a shape based approach using
stereo (range) data instead of a 3D voxel representa-
tion.
3 METHOD
Data from the stereo camera consists of a colour map
and a depth map. The dynamic portion of both maps
is determined using an adaptive background model.
An algorithm is used that matches a spherical crust
template on the foreground regions of the depth map.
False positives are suppressed by putting constraints
on the spread of the points within the template. Then
blob separation is performed. In the last step the de-
tections are fed into a tracker that ensures the conti-
nuity of individual detections.
3.1 Foreground Selection
Foreground selection may be performed on the basis
of appearance or depth. Appearance based methods
are affected by shadows, whereas depth methods are
imprecise because of foreground fattening (Scharstein
and Szeliski, 2002). We overcome both by using
a hybrid model. The appearance of each pixel is
modelled by a mixture of Gaussian distributions aug-
mented with a shadow suppression method by (Hor-
prasert et al., 1999). We add a fourth dimension to the
model to represent the variation in each pixel’s depth.
A computational optimization is incorporated to dis-
card unsupported distributions (Zivkovic, 2004).
To repress noise, morphological operations are
used. The resulting foreground pixels are grouped
using a connected component labelling algorithm
(Horn, 1986). Blobs that contain too few pixels are
discarded. The data corresponding to the remaining
blobs are analysed with our head detector.
3.2 Head Detection
The depth map is treated as a point cloud in which
we search for clusters arranged in a sphere that is pro-
portional in size to human heads. Any such cluster is
checked against additional constraints.
Our method uses a spherical crust template as sug-
gested by (Miki
´
c et al., 2003). Their method works
with voxel data obtained from multi camera space
carving. Our stereo camera only provides a 2.5D de-
scription, wherein occlusion plays a bigger role. In
addition, their method assumes exactly one person is
in view defining the problem as localisation, whereas
we are interested in detecting the number of heads.
3.2.1 Template Matching
The point cloud from each blob is searched for head
shapes using a template. This template consists of two
spherical bounds around the same centre that define
the minimum and maximum head sizes that can be de-
tected. Both are tuned to anatomically plausible val-
ues. To enforce roundness of the point cloud portion
inside the template, we augment the crust template
with negative regions. The locations of these regions
are illustrated in Figure 1. The region within the inner
bound rejects scattered or planar clouds, whereas the
region outside the outer bound enforces that the round
shape is not connected to other shapes as is the case
with shoulders. As a result, the template will only fit
point clouds that lie around an empty core.
+
+
+
+
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
Figure 1: A cross-section of the template used for head de-
tection showing the positive and negative regions.
Candidate heads are found by applying the tem-
plate at regular discrete intervals throughout the
bounding volume of a blob’s point cloud. Once a
head candidate is localized using this template, its ex-
act dimensions can be calculated. A candidate is con-
sidered for further processing if it achieves a certain
density and a high enough ratio between positive and
negative points as described below.
HEAD DETECTION IN STEREO DATA FOR PEOPLE COUNTING AND SEGMENTATION
621
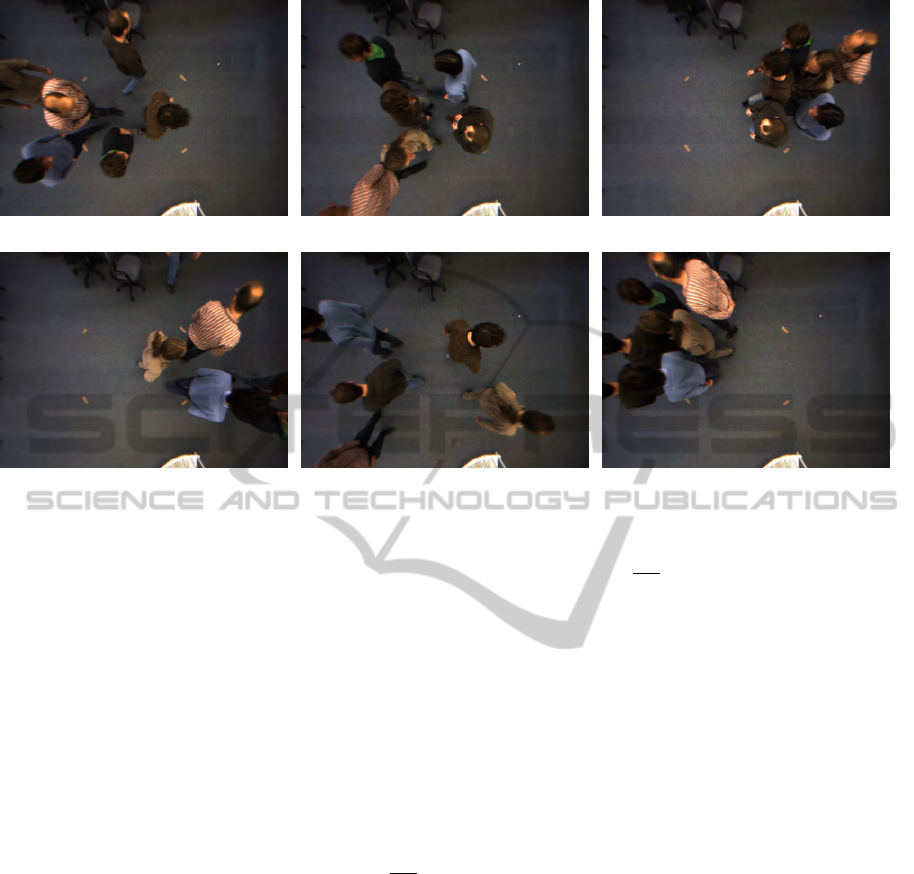
(a) Walking Frame 40 (b) Crossing Frame 38 (c) Walking Close Frame 29
(d) Walking Frame 77 (e) Crossing Frame 61 (f) Walking Close Frame 64
Figure 2: (2(a), 2(d)) “Walking”. (2(b), 2(e)) “Crossing”. (2(c), 2(f)) “Walking close”. See section 4.1 for descriptions.
3.2.2 Candidate Selection
As a first criterion for candidate selection, the number
of points in the template needs to be sufficient. We
can compute how many pixels the candidate would
cover in the camera’s view. We project a sphere with
the parameters of the candidate onto the image plane
and count the resulting amount of pixels.
As a second criterion, we acknowledge that the
amount of noise in the depth data will cause a cer-
tain number of points to fall outside the crust and into
the negative regions of the template. The number of
points in the negative regions n and the number of
points in the positive region p define a ratio r =
p
p+n
.
Should r be below a particular threshold, determined
by the amount of noise in the data, then the surface
described by the candidate’s points does not follow
the template shape and the candidate is discarded.
Subsequently, the distribution of points within the
template is inspected. The mean of all the candi-
date’s points is taken to be the centre of the point
cluster. The computed centre point must lie above the
template’s centre to prevent matches against concave
curves. In addition, the points must be evenly divided
around the sphere crust. This additional constraint
prevents unbalanced shapes that score high only in
one dense region but are not spherical.
Finally, overlapping candidates are removed. To
prevent pruning a good candidate in favour of a lesser
match, a fitness measure is computed according as
such: Fitness = p ·
p
p+n
, where p and n are the pos-
itive and negative counts respectively. Starting with
the highest scoring candidate, all overlapping candi-
dates are discarded. This step eliminates candidates
competing for the same shape. The remaining candi-
dates are taken to correspond to heads and represent
the number of people in a blob along with their posi-
tions and person heights.
3.3 Blob Separation
After head detection has been completed, all blobs
that contain more than one detected head must be
split. All pixels in the original blob are each as-
signed to exactly one new blob. The blobs are split
in the range domain based on their position. First, all
points in the blob as well as the centre points from
the heads detected in the blob are projected on the
ground plane. A Voronoi decomposition is done in
this space. The ground plane projection resembles the
occupation maps used by some authors. However, we
already know the amount op people at this point and
the projection is used for a different purpose. With-
out projection, a taller person in the blob would not
be able to attract any points from their lower region.
Blobs in which no heads were detected can be the
result of (1) a person walking into view that is not
fully visible yet, (2) objects that are not people, or (3)
false negative detections by the head detection algo-
rithm. Depending on the application it can be decided
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
622

to use these blobs as if they were people, classify them
as non-people or discard them.
3.4 Tracking
Producing tracks from individual detections allows
route summaries to be created and detection errors
to be corrected by assuming object persistence. To
this end we use a set of Kalman filters. For measure-
ments we take the projected head locations. Because
we mean this method to work online, we do not look
ahead and do not re-evaluate previous measurement-
to-track assignments. We use the averaged Maha-
lanobis distance given by Equation 1 for data asso-
ciation, where ~m is a measurement,
ˆ
t is a track’s ex-
trapolated state and σ denotes the covariance matrix.
Measurements and tracks are matched according to
their smallest distance, with each measurement being
matched to at most one track and vice versa.
New tracks are created for all measurements that
could not be matched. Tracks that do not get any mea-
surements assigned to them will be maintained for a
set amount of time after which they are removed from
the active set of tracks. In case a deactivated track has
had too few measurement assignments it is likely the
result of noise and is discarded.
D(~m,
ˆ
t) =
r
(~m−
ˆ
t)
2
σ(~m)
2
+
r
(~m−
ˆ
t)
2
σ(
ˆ
t)
2
2
(1)
Equation 1: Distance measure between an object and an
extrapolated track state.
4 EXPERIMENTS
This section discusses experiments that evaluate our
method. We first describe the experimental setup and
the utilised data (Subsection 4.1). Subsequently, we
present the experimental results (Subsection 4.2).
4.1 Experimental Setup
People counting is evaluated using three methods. All
three methods are evaluated on their own and in com-
bination with tracking. The first method is the refer-
ence and is as described in Section 3.
The second method focusses solely on blob detec-
tion done by connected component labelling, where
the amount of blobs is judged against the number of
visible people. Blob detection is meant to separate
disconnected portions of the foreground. This alter-
native method works well to separate people when
they do not touch or overlap. However, in crowded
situations they often do (Figure 2(b) and Figure 2(d)).
The third method imposes an extra constraint on
the foreground pixels before connected component
labelling is applied, demanding a pixel’s height to
be 1.70m or higher. The effect of this is that the
lower points that are usually responsible for overlap
are cut off. If the cut-off height is chosen to lie above
all visible shoulders but below all visible scalps then
this method is essentially a crude head detector. The
method is judged against the number of people for
who a portion above the cut-off threshold is in view.
Evaluation. Each of the three methods is validated
against the correct number of people that are visible to
that method. To test their performances, three image
sequences totalling 292 frames (Figure 2) were anal-
ysed using each of the methods. The first sequence
(‘walking’, 106 frames) shows a group of 6 people
walking across the image with all frames showing at
least five people in full or partially. The second se-
quence (‘Crossing’, 85 frames) shows a group of 2
and a group of 4 people walking in opposite direc-
tions and crossing in the middle. The third sequence
(‘Walking Close’, 101 frames) shows a group of 6
people walking across the image but closer together
than in sequence 1 and staying together. These se-
quences present increasing amounts of overlap and
mimic different real life scenarios. Ground truths
were set manually in all frames for the counts that
each method should have been able to reach in them.
We measure precision (the portion of results
that were heads/people) and recall (the portion of
heads/people that were correctly detected). Any time
a head is not detected this is counted as a false nega-
tive. When a head is detected in a place where there
is none this is counted as a false positive. If a head is
detected but it is off target then it is counted as both
a false negative and a false positive, since in this sit-
uation the head was not detected while a result was
returned that was not a head.
Tracking. We evaluate precision and recall when
used in combination with a tracker. In this case the
tracker’s position estimate is used when no head is de-
tected at or near that location. If the estimate appears
over a person’s locations then it is counted as a true
positive. If the tracker drifts or the person changes
course and no longer appears at the extrapolated lo-
cation then the tracker’s estimate is counted as both a
false positive and a false negative. No extra penalty
was given in terms of precision and recall to tracks
that switched target.
HEAD DETECTION IN STEREO DATA FOR PEOPLE COUNTING AND SEGMENTATION
623
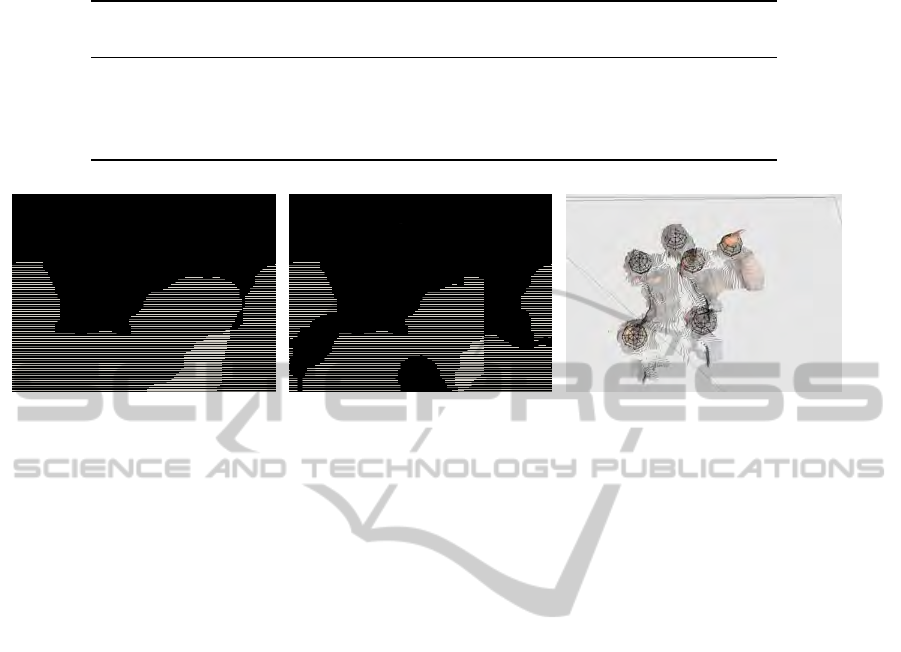
Table 1: Numeric precision and recall per sequence per method, in parentheses with tracking.
Head Detection Blob Detection Height Threshold
Precision Recall Precision Recall Precision Recall
All Frames .92 (.94) .89 (.97) .47 (.47) .19 (.19) .91 (.92) .82 (.86)
Walking .91 (.92) .90 (.98) .48 (.53) .18 (.20) .98 (1.0) .98 (1.0)
Crossing .90 (.93) .89 (.96) .61 (.58) .37 (.36) .97 (.97) .94 (.97)
Walk Close .95 (.97) .88 (.96) .06 (.09) .01 (.02) .75 (.77) .55 (.63)
(a) Blob detection: 1 blob (b) Height thresholding: 5 blobs (c) Head detection: 6 heads
Figure 3: A visual example of the output of the three algorithms for frame 29 of “Walking close” (Figure 2(c)).
4.2 Results
In Table 1 the results for the precision and recall ex-
periment without tracking are given without paren-
thesis. We observe that without tracking, in all sce-
narios, the performances for both head detection and
height thresholding are considerably higher than that
of blob detection. Moreover, we observe that head
detection consistently achieves a comparatively good
performance throughout all scenarios, whereas height
thresholding performs better in the walking and cross-
ing sequences but considerably worse in the walking
close scenario.
The results for the tracking enhanced experiment
are shown in parenthesis in Table 1. We observe that
all results are equal or better than the results without
tracking except for blob detection in the crossing se-
quence. Further we see that in cases where results im-
prove, recall benefits most from the addition of track-
ing. In only one scenario did tracks switch targets,
namely in the walking close sequence using the height
thresholding method. Over the course of the longest
streak of misdetections 5 trackers switched targets 6
times.
Illustrations from the segmentation output and
head localisation are given in Figure 3. The output for
the head detector is presented in 3D with wire-frame
spheres indicating the locations of heads.
5 DISCUSSION
Although height thresholding performs well un-
der certain circumstances (walking and crossing se-
quences), its performance drops for crowded scenes.
In the walking close sequence, stereo fattening
bridges the small gap between people even at head
level. Additionally, an optimal height threshold may
not exist, since the difference in person height can
easily put one person’s scalp below another person’s
shoulders. Raising the threshold will overlook short
people, whereas lowering it will push the performance
towards that of blob detection.
As expected the addition of tracking means many
false negatives can be recovered resulting in higher re-
call overall. However, a tracker can only increase per-
formance if misdetections are spread out. Although
the tracker can also isolate and discard single false
positives, tracks that should have been finalised some-
times lingered because a false positive appeared at its
extrapolated location.
The method is not limited to video sequences. In-
deed, heads are detected on a per frame basis, thus the
method works comparatively well on isolated frames.
In the experiments described in Section 4, ground
truths were created manually for all 292 frames of test
data, the majority of which featured multiple heads,
giving a total of 764 possible individual detections
over which the results were gathered. To ensure ad-
equate test data, the recorded sequences vary the dis-
tribution, density and appearance of people in view.
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
624

6 CONCLUSIONS AND FUTURE
WORK
Experimental results show that the proposed method
performs well in terms of both precision and recall.
In addition, the method was shown to perform well
in highly crowded situations. From our results, we
may conclude that the proposed method provides a
strong basis for head detection in applications that
utilise stereo cameras and that it works well both on
its own and in combination with tracking.
For future work, we will investigate how the blob
splitting method can be enhanced for a better segmen-
tation of people in stereo images. The detected head
locations may serve as a basis for detecting other body
parts and, ultimately, recognition of complete poses.
Finally, given the blob splitting that the method en-
ables, we can build rich profiles based on colour and
height that can be used for cross camera correlation in
a sparse camera setup.
ACKNOWLEDGEMENTS
The research reported in this paper was supported
by the Foundation Innovation Alliance (SIA - Sticht-
ing Innovatie Alliantie) with funding from the Dutch
Ministry of Education, Culture and Science (OCW),
in the framework of the ‘Mens voor de Lens’ project.
REFERENCES
Beymer, D. (2000). Person counting using stereo. In Work-
shop on Human Motion, pages 127–133.
Darrell, T., Gordon, G., Harville, M., and Woodfill, J.
(2000). Integrated person tracking using stereo, color,
and pattern detection. International Journal of Com-
puter Vision, 37(2):175–185.
Fu, H. C., Chen, J. R., and Pao, H. T. (2007). Re-
mote head counting and tracking in crowded scene via
WWW/Internet. In Proceedings of the IADIS Interna-
tional Conference WWW/Internet 2007.
Hayashi, K., Hashimoto, M., Sumi, K., Sasakawa, K., Cen-
ter, A. T., Co, M. E., and Hyogo, J. (2004). Multiple-
person tracker with a fixed slanting stereo camera.
In Sixth IEEE International Conference on Automatic
Face and Gesture Recognition, 2004. Proceedings,
pages 681–686.
Heisele, B. and Woehler, C. (1998). Motion-based recog-
nition of pedestrians. In Pattern Recognition, 1998.
Proceedings. Fourteenth International Conference on,
volume 2.
Horn, B. (1986). Robot vision. McGraw-Hill Higher Edu-
cation.
Horprasert, T., Harwood, D., and Davis, L. S. (1999). A sta-
tistical approach for real-time robust background sub-
traction and shadow detection. In IEEE ICCV, vol-
ume 99.
Hoshino, T. and Izumi, T. (2006). Improvement of head
extraction for height measurement by combination of
sphere matching and optical flow. In SICE-ICASE,
2006. International Joint Conference, pages 1607–
1612.
Huang, X., Li, L., and Sim, T. (2004). Stereo-based human
head detection from crowd scenes. In Proceedings of
International Conference on Image Processing, pages
1353–1356.
Ishii, Y., Hongo, H., Yamamoto, K., and Niwa, Y. (2004).
Face and head detection for a real-time surveillance
system. In Pattern Recognition, 2004. ICPR 2004.
Proceedings of the 17th International Conference on,
volume 3, pages 298–301. IEEE.
Kelly, P., O’Connor, N. E., and Smeaton, A. F. (2009).
Robust pedestrian detection and tracking in crowded
scenes. Image and Vision Computing, 27(10):1445–
1458.
Luo, R. and Guo, Y. (2001). Real-time stereo tracking
of multiple moving heads. In IEEE ICCV Workshop
RATFG-RTS01, pages 55–59.
Miki
´
c, I., Trivedi, M., Hunter, E., and Cosman, P. (2003).
Human body model acquisition and tracking using
voxel data. International Journal of Computer Vision,
53(3):199–223.
Park, S. and Aggarwal, J. K. (2000). Head segmentation
and head orientation in 3d space for pose estimation
of multiple people. In IEEE Southwest Symposium on
Image Analysis and Interpretation.
Scharstein, D. and Szeliski, R. (2002). A taxonomy and
evaluation of dense two-frame stereo correspondence
algorithms. International journal of computer vision,
47(1):7–42.
Stauffer, C. and Grimson, W. E. L. (1999). Adaptive
background mixture models for real-time tracking.
In Computer Vision and Pattern Recognition, 1999.
IEEE Computer Society Conference on., volume 2.
Zhao, T. and Nevatia, R. (2003). Bayesian human seg-
mentation in crowded situations. In IEEE Computer
Society Conference on Computer Vision and Pattern
Recognition, volume 2.
Zivkovic, Z. (2004). Improved adaptive gaussian mixture
model for background subtraction. In Pattern Recog-
nition, 2004. ICPR 2004. Proceedings of the 17th In-
ternational Conference on, volume 2.
HEAD DETECTION IN STEREO DATA FOR PEOPLE COUNTING AND SEGMENTATION
625
