
SPARSE WINDOW LOCAL STEREO MATCHING
S
anja Damjanovi´c, Ferdinand van der Heijden and Luuk J. Spreeuwers
Signals and Systems Group, University of Twente, Hallenweg 15, 7522 NH Enschede, The Netherlands
Keywords:
Local stereo matching, Sparse window matching, Sum of squared differences, WTA.
Abstract:
We propose a new local algorithm for dense stereo matching of gray images. This algorithm is a hybrid of
the pixel based and the window based matching approach; it uses a subset of pixels from the large window
for matching. Our algorithm does not suffer from the common pitfalls of the window based matching. It
successfully recovers disparities of the thin objects and preserves disparity discontinuities. The only criterion
for pixel selection is the intensity difference with the central pixel. The subset contains only pixels which lay
within a fixed threshold from the central gray value. As a consequence of the fixed threshold, a low-textured
windows will use a larger percentage of pixels for matching, while textured windows can use just a few.
In such manner, this approach also reduces the memory consumption. The cost is calculated as the sum of
squared differences normalized to the number of the used pixels. The algorithm performance is demonstrated
on the test images from the Middlebury stereo evaluation framework.
1 INTRODUCTION
Stereo matching has been actual topic of research for
almost four decades since one of the first papers ap-
peared in 1979 (Marr and Poggio, 1979). There is de
facto established evaluation framework for objective
comparison of different stereo algorithms (Scharstein
and Szeliski, 2002). Stereo algorithms can be clas-
sified into two categories: local and global. Al-
though the global algorithms are more sophisticated
and achieve high accuracy, the local algorithms are
more present in the practical computer vision appli-
cations because of its low computational load and
efficient hardware implementation (Lu et al., 2007),
(Tombari et al., 2008), (Nalpantidis et al., 2008).
In local stereo matching, the cost is aggregated
over a support window which is most often rectan-
gular. It is inherently assumed that all pixels within
the matching window have the same disparity. The
fronto-parallel assumption is not valid for e.g. curved
surfaces due to perspective distortion and occlusion.
Therefore, the window-based matching produces dif-
ferent artifacts in the final disparity map: the discon-
tinuities are smoothed and the disparity of the texture
richer surfaces are propagated into the lower textured
areas (Zitnick and Kanade, 2000). Another limita-
tion is the dimension of the objects whose disparity
can be successfully recovered; the object’s height and
width in the image should be at least half the size
of the window dimensions in order to be detected in
the window matching. The idea that properly shaped
support area for cost aggregation can result in better
matching result has been long present in the literature
(Zhang et al., 2008), (Tombari et al., 2008), (Hosni
et al., 2010).
The ideal window for matching would be only
one pixel. However, the one-pixel window does not
provide sufficiently discriminatory cost for the local
stereo matching. In order to combine the support of
many pixels for cost aggregation as in the window-
based matching but not to be limited by the window
dimension like in the pixel-based matching, we in-
troduce the hybrid support: a set of properly cho-
sen pixels within the rectangular window. We use
”sparse window” in cost aggregation and the sum of
squared differences normalized to the number of pix-
els (nSSD) for cost aggregation and the winner takes
all (WTA) in the disparity selection step.
The pixel selection by thresholding is also present
in the work (Zhang et al., 2008), which presents
the area-based matching technique. The point-based
matching within the global framework is considered
in (Mattoccia, 2009) by explicit modeling the mutual
relationships among neighboring points. In both of
these approaches in (Zhang et al., 2008) and (Mattoc-
cia, 2009) the RGB images are used, while we use
gray valued images.
689
Damjanovi
´
c S., J. Spreeuwers L. and van der Heijden F..
SPARSE WINDOW LOCAL STEREO MATCHING.
DOI: 10.5220/0003369106890693
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2011), pages 689-693
ISBN: 978-989-8425-47-8
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
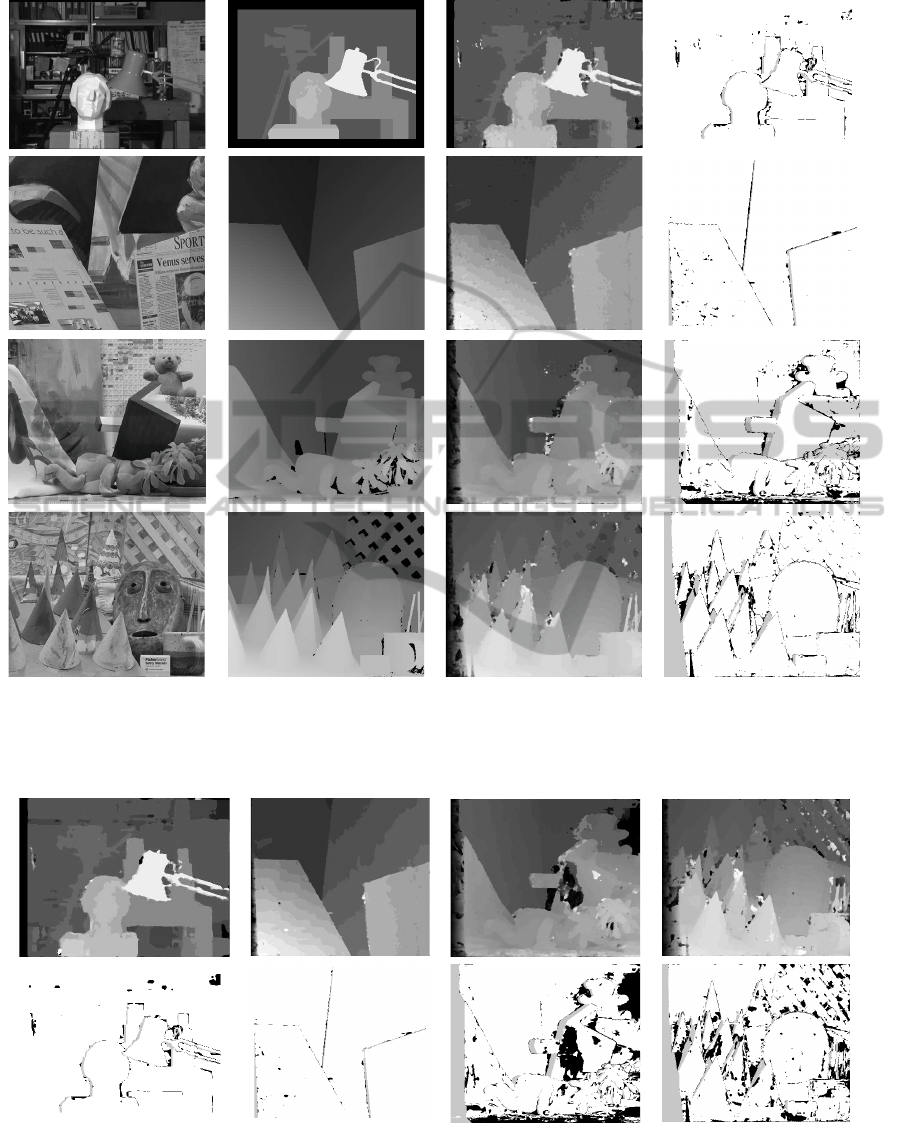
Figure 1: Disparity results for the stereo pairs (1st row: Tsukuba, 2nd row: Venus, 3rd row: Teddy, 4th row: Cones) from
the Middlebury database. From left to the right columns show: The left image, Ground truth, Result computed by the sparse
window matching technique, Disparity errors larger than 1 pixel. The nonoccluded regions errors with ranking (January 2011)
are respectively: Tsukuba 2.82% (65), Venus 1.20% (67), Teddy 9.16% (68), Cones 5.91% (75).
Figure 2: Disparity maps calculated by sparse window technique without the offset compensation [the upper row] and their
bad pixels maps [the lower row]. The nonoccluded regions errors with ranking (January 2011) are respectively: Tsukuba
2.53% (61), Venus 0.63% (47), Teddy 17.5% (99), Cones 13.8% (101).
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
690

2 SPARSE WINDOW MATCHING
2.1 Algorithm Framework
We consider a pair of gray valued rectified stereo im-
ages I
L
and I
R
with disparity range D. We recover
the disparity map which corresponds to the reference
image I
L
. In the matching process, we observe the
rectangular W
x
× W
x
, W
x
= 2 · w
x
+ 1, windows and
select some pixels from the left and right matching
windows as a suitable for matching. The pixel from
the left matching window declared as suitable is se-
lected for the cost aggregation step only if the pixel at
the same position from the right window is also de-
clared as suitable for matching. From the N
p
selected
pixels in each window, we form two N
p
× 1 vectors
z
l
and z
r
. SSD normalized to the number of pixels
N
p
is used for the cost calculation. Winner-Takes-
All (WTA) method is applied to trustworthy dispar-
ity candidates. In the postprocessing step, we use the
common median filter.
2.2 Pixel Selection
The continuity constraint states that disparity varies
smoothly everywhere, except on the small fraction of
the area on the boundaries of object where disconti-
nuity occurs (Marr and Poggio, 1979). Window based
matching methods consider the approximation of the
continuity constraint: they assume that all the pixels
in the window have the same disparity. This approx-
imation is too rough in many cases e.g. for inclined
surface, thin objects, round surfaces. We introduce
less restrictive assumption: We assume that the pixels
with close gray values have the same disparity i.e. we
do not assume that all window pixel have the identical
disparity but only some of them. The pixels which are
close to the central window pixel in the color space
should be used in the cost aggregation step.
We declare the pixel at the position (i, j), i, j =
1, ..,W
x
in the left window as suitable for matching if
its gray value w
i, j
l
differs from the central pixel’s gray
value c
l
= w
w
x
+1,w
x
+1
l
for less than the predefined
threshold T
L
. The suitable pixels in the right window
are chosen in the similar manner. Pixel at the position
(i, j), i, j = 1, ..,W
x
in the right window is declared as
suitable for matching if its gray value w
i, j
r
differs from
the central pixel’s gray value c
r
= w
w
x
+1,w
x
+1
r
for less
than the predefined threshold T
R
. The vectors z
l
and
z
r
are formed from the pixels at the position at which
pixels in both matching windows are declared as suit-
able. The pseudo-code of the pixel selection step is
given in Algorithm 1.
Algorithm 1: Pixel selection.
N
p
= 0
for i = 1 to W
x
do
for j = 1 to W
x
do
if |w
i, j
l
− c
l
| < T
L
and |w
i, j
r
− c
r
| < T
R
then
N
p
= N
p
+ 1
add w
i, j
l
to vector z
l
add w
i, j
r
to vector z
r
end if
end for
end for
With the fixed window size W
x
and fixed thresh-
olds T
L
and T
R
we expect for the low-textured win-
dows to have a high number participating pixels
(N
p
→ W
2
x
) and for rich-textured windows sometimes
just a few pixels or even one. In these two extreme
cases we introduce additional steps in order to pre-
vent errors. In the case of low textured window, we
erode the selected pixel mask to preventthat the pixels
from the neighboring textureless areas with the simi-
lar intensities influence the cost. In the case of rich-
textured windowswith only several pixels selected for
matching, we perform dilation in order to prevent er-
rors due to e.g. aliasing.
2.3 Cost Aggregation
We consider that the constant brightness assumption
(CBA) is satisfied in the process of matching. We ex-
pect the corresponding pixels to be very close in in-
tensity values, except for the Gaussian noise with the
variance σ
2
n
. This expectation is justified by the out-
lier elimination in the process of pixel selection as ex-
plained in the previous subsection 2.2. We choose the
cost based on the sum of squared differences (SSD)
(Belhumeur, 1996), (Cox, 1994). In order to be able
to compare the costs with different number of pix-
els participating in the matching for the same central
pixel, we introduce the SSD cost normalized to the
number of pixels N
p
:
C
nSSD
∝
1
N
p
·
k z
l
− z
r
k
2
4·σ
2
n
. (1)
The proposed cost eq.(1) is not invariant to
unknown pixel offsets which can cause erroneous
matching result. We deal with unknown offsets by
subtracting a constant from vectors z
l
and z
r
, (Dam-
janovi´c et al., 2009). We choose to subtract the central
pixel values c
l
and c
r
from vectors z
l
and z
r
:
z
l
= z
l
− c
l
·e (2)
z
r
= z
r
− c
r
·e (3)
where e is all 1 column vector of the length N
p
.
SPARSE WINDOWLOCAL STEREO MATCHING
691

2.4 Adjusted WTA and Postprocessing
The WTA method is used to select the optimal dispar-
ity d
r,c
for the pixel at the position (r, c) in the left im-
age. The WTA method takes into account the number
of pixels that support the decision by choosing among
the trustworthy disparity candidates. The trustworthy
disparity candidates have at least N
s
= K
p
·max{N
r,c
p
}
pixels participating in the cost aggregation, where N
r,c
p
is D× 1 vector with number of the participating pix-
els in the cost aggregation for each possible disparity
value. K
p
is the ratio coefficient 0 < K
p
≤ 1. The
optimal disparity d
r,c
is found as:
d
r,c
= argmin
d
i
{C
r,c
nSSD
(d
i
)| N
r,c
p
(d
i
) > N
s
}, (4)
where r = 1, . . . , R and c = 1, . . . ,C, for the image of
the dimension R ×C pixels. The postprocessing step
performs median L× L filtering on the disparity map
d to eliminate spurious disparities.
3 EXPERIMENT RESULTS AND
DISCUSSION
We have used the Middlebury stereo benchmark
(Scharstein and Szeliski, 2002) to evaluate the per-
formance of the sparse window technique. The pa-
rameters of the algorithm are fixed for all four stereo
pairs: T
L
= 10, T
R
= 10, w
x
= 15, W
x
= 31, σ
2
n
= 0.5.
In the process of pixel selection, we declare the win-
dow as textureless if in more than w
x
+ 1 columns
and in more than w
x
+ 1 rows, more than half pix-
els from the left window are selected for match-
ing. The structuring element in erosion step is square
N
E
× N
E
, N
E
= 5. Dilation is performed with squared
N
D
× N
D
, N
D
= 3 structuring element, if there are less
than N
min
columns with less than N
min
pixels or if
there are less than N
min
rows with less than N
min
pix-
els, N
min
= 5. WTA parameter is K
p
= 0.5. Post-
processing step is L× L median filtering with L = 5.
These parameters have been found empirically.
The disparity maps obtained by our algorithm
(with offset compensation) for the stereo pairs from
the Middlebury database are shown in the third col-
umn in Figure 1. The leftmost column contains the
left images of the four stereo pairs. In the first row
are images of the Tsukuba stereo pair, followed by
Venus, Teddy and Cones. Ground truth (GT) dispar-
ity maps are in the second column. The forth column
shows the bad disparity maps where the wrong dispar-
ities are shown in black. The occlusion regions are in
gray and the white regions denote correctly calculated
disparity values. The quantitative results in the Mid-
dlebury stereo evaluation framework are presented in
Table 1. The table shows the ranking of the results to-
gether with the error percentages for the nonoccluded
region (NONOCC), error for all pixels (ALL), and the
error percentage in the discontinuity region (DISC).
We consider the ranking of the NONOCC column
most important. We do not deal with the occluded
and discontinuity regions in our algorithm. The re-
sults show that with our hybrid technique edges of
the objects are preserved. The disparities of some
narrow structures are successfully detected and recov-
ered, although their dimensions are much smaller than
the size of the window. Such example of the narrow
objects are most noticeable in Tsukuba disparity map
(the lamp reconstruction) and in Cones disparity map
(pens in a cup in the lower right corner). On the other
hand, the disparities of the large low textured surfaces
in stereo pairs Venus and Teddy are also successfully
recovered with the same sparse window technique.
The images in the Middlebury database have dif-
ferent sizes and disparity ranges, as well as differ-
ent radiometric properties. The stereo pairs Tsukuba
(384×288 pixels) and Venus (434×383) have dispar-
ity ranges from 0 to 15 and from 0 to 19. The radio-
metric properties of the images in these stereo pairs
are almost identical, and our algorithm gives even bet-
ter results without the offset compensation given by
eq. (2). The error percentages for the nonoccluded
regions for these two pairs without the offset compen-
sation are 2.53% and 0.62% respectively, see Figure
2. Figure 2 shows in the upper row the disparity maps
calculated using the sparse window technique without
the offset compensation step for all four stereo pair
from the evaluation framework and the lower row of
figure 2 contains corresponding bad pixel maps with
color coding as in the previousfigure. The stereo pairs
Teddy (450×375 pixels) and Cones (450×375) have
disparity ranges from 0 to 59. The images of these
stereo pairs are not radiometrically identical. The
sparse window matching without the offset compen-
sation step results in very large errors, see Figure 2.
The error percentages for the nonoccluded regions for
the stereo pairs Teddy and Cones without the offset
compensation are 17.5% and 13.8%.
4 CONCLUSIONS
We introduced a new sparse window technique for
local stereo matching. The algorithm is simple for
implementation, as it is based on pixel selection by
thresholding, normalized sum of squared differences
cost and plain median filtering in the postprocessing
step. Our algorithm does not suffer from the com-
mon pitfalls of the window-based matching. It does
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
692

Table 1: Evaluation results based on the online Middlebury
stereo benchmark (Scharstein and Szeliski, 2002): The er-
rors are given in percentages for the nonoccluded (NO) re-
gion, the whole image (ALL) and discontinuity (DISC) ar-
eas. The numbers in the brackets indicate the ranking in the
Middleburry table on January 27th, 2011.
Images NONOCC ALL DISC
Tsukuba 2.82 (65) 4.68 (73) 11.7 (67)
Venus 1.20 (67) 2.87 (77) 12.4 (73)
Teddy 9.16 (68) 18.4 (85) 22.1 (77)
Cones 5.91 (75) 16.2 (88) 15.0 (79)
not use color information as many other algorithms
and that may improve results in some cases. Yet,
the sparse window local stereo matching produces ac-
curate smooth and discontinuity preserving disparity
maps. Although, the presented disparity maps are re-
sults of only one left to right matching are without pa-
rameter optimization, they score well in the compar-
ison with other algorithms, outperforming even some
global algorithms and algorithms with much more
sophisticated segmentation and postprocessing tech-
niques.
We demonstrated that the sparse window match-
ing is promising technique. Our algorithm can be
further improved by introducing disparity map refine-
ment and occlusion treatment.
REFERENCES
Belhumeur, P. N. (1996). A Bayesian approach to binocular
stereopsis. Int. J. Comput. Vision, 19(3):237–260.
Cox, I. J. (1994). A maximum likelihood n-camera stereo
algorithm. In In IEEE Conf. on Computer Vision and
Pattern Recognition, pages 733–739.
Damjanovi´c, S., van der Heijden, F., and Spreeuwers, L. J.
(2009). A new likelihood function for stereo match-
ing: how to achieve invariance to unknown texture,
gains and offsets? In VISIGRAPP 2009, International
Joint Conference on Computer Vision, Imaging and
Computer Graphics Theory and Applications, Lisboa,
Portugal, pages 603–608, Lisboa. INSTICC Press.
Hosni, A., Bleyer, M., Gelautz, M., and Rhemann, C.
(2010). Geodesic adaptive support weight approach
for local stereo matching. In Computer Vision Winter
Workshop 2010, pages 60–65.
Lu, J., Lafruit, G., and Catthoor, F. (2007). Fast vari-
able center-biased windowing for high-speed stereo
on programmable graphics hardware. In ICIP (6),
pages 568–571.
Marr, D. and Poggio, T. (1979). A computational theory of
human stereo vision. Proceedings of the Royal Society
of London, B-204:301–328.
Mattoccia, S. (2009). A locally global approach to stereo
correspondence. In 3DIM09, pages 1763–1770.
Nalpantidis, L., Sirakoulis, G. C., and Gasteratos, A.
(2008). Review of Stereo Vision Algorithms: from
Software to Hardware. International Journal of Op-
tomechatronics, 2(4):435–462.
Scharstein, D. and Szeliski, R. (2002). A taxonomy and
evaluation of dense two-frame stereo correspondence
algorithms. International Journal of Computer Vision,
47(1-3):7–42.
Tombari, F., Mattoccia, S., Di Stefano, L., and Addimanda,
E. (2008). Classification and evaluation of cost aggre-
gation methods for stereo correspondence. In Com-
puter Vision and Pattern Recognition, 2008. CVPR
2008. IEEE Conference on, pages 1–8.
Zhang, K., Lu, J., and Lafruit, G. (2008). Scalable stereo
matching with locally adaptive polygon approxima-
tion. In Image Processing, 2008. ICIP 2008. 15th
IEEE International Conference on, pages 313–316.
Zitnick, C. L. and Kanade, T. (2000). A cooperative al-
gorithm for stereo matching and occlusion detection.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 22(7):675–684.
SPARSE WINDOWLOCAL STEREO MATCHING
693
