
ROADGUARD
Highway Control and Management System
Salma Kammoun Jarraya
MIRACL-FSEG, Sfax University, Rte Aeroport Km 4, 3018 Sfax, Tunisia
Adam Ghorbel, Ahmed Chaouachi, Mohamed Hammami
MIRACL-FS, Sfax University, Rte Soukra Km 3 BP 802, 3018 Sfax, Tunisia
Keywords: Moving object detection, Tracking, Counting, Shadow detection, Shadow removal.
Abstract: In this paper, we propose a new approach, called RoadGuard, for Highway Control and Management
System. RoadGuard is based on counting and tracking moving vehicles robustly. Our system copes with
some challenges related to such application processing steps like shadow, ghost and occlusion. A new
algorithm is proposed to detect and remove cast shadow. The occlusion and ghost problems are resolved by
the adopted tracking technique. A comparative study by quantitative evaluations shows that the proposed
approach can detect vehicles robustly and accurately from highway videos recorded by a static camera
which include several constraints. In fact, our system has the ability to control highway by detecting strange
events that can happen like sudden stopped vehicles in roads, parked vehicles in emergency zones or even
illegal conduct such going out from the road. Moreover, RoadGuard is capable to manage highways by
saving information about date and time of overloaded roads.
1 INTRODUCTION
Highway surveillance is an active research subject in
computer vision. In fact, the rapidly increasing of
car’s numbers makes the roads overloaded and
traffic congestion growing up. The traditional
solution has been to construct more and larger
roadways, but that is no longer seen as an option by
transportation planners, due to the high financial,
social, and environmental costs of such giant
projects. More efficient use of the existing roadways
especially highways network using advanced
technologies seems to be the answer. Therefore, in
perfect harmony with the big international
orientations, considerable investigations aim to keep
the world moving safely, comfortably,
economically, and without harm to our environment
by creating the best transportation system through
proactive excellence, leadership and innovation in
services. The objective is to ensure that roadways
continue to be safer and more technologically up-to-
date. Software solutions like Highway Control and
Management systems (HCMSs) are used to solve
these problems. These systems can lead to semantic
results, such as ‘87 cars are in the right side of the
highway’ or ‘an obstacle is on the road!!’ or ‘car
No.5 is faster than car No.1’ etc.
Semantic results of HCMS are based on counting
and tracking moving vehicles starting by detecting
moving objects (foregrounds). In fact, foregrounds
detection could be considered as one of the
fundamental and critical step in this field. Moving
object detection methods cannot differentiate real
foregrounds from their shadow since they shared
some motional features. This has bad effects on
performance of the upper steps of HCMS. Actually,
researches related to these tasks are still far from
being solved.
In this paper, we present RoadGuard, a new
HCMS that counts and tracks robustly vehicles in
highway. Moreover, our system copes with different
challenges such as shadow, occlusion, ghost and
others outdoor conditions. Since shadow detection
and removal takes a careful consideration in HCMS,
we propose a new algorithm which detect moving
shadows and suppress the cast part. Indeed, we
adopt a tracking technique that resolve occlusion and
ghost problems.
632
Kammoun Jarraya S., Ghorbel A., Chaouachi A. and Hammami M..
ROADGUARD - Highway Control and Management System.
DOI: 10.5220/0003369406320637
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2011), pages 632-637
ISBN: 978-989-8425-47-8
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

This paper is organized as follow. In section 2,
we started out with over viewing state of art on
common process steps of HCMSs. Following that,
our proposed approach RoadGuard is reviewed in
section 3. In section 4, an intensive experimental
evaluation and comparison results are discussed. The
proposed approach is summarized and future works
directions are presented in section 5.
2 LITERATURE SURVEY
In this section, we give a state of art on the common
process steps of HCMSs. In general, process of such
systems includes four steps: (1) Moving object
detection, (2) Shadow detection and removal, (3)
Tracking and (4) Counting. The (1), (2) and (3) are
widely treated in literature. The proposed
approaches for each step are presented in the
following subsections.
2.1 Moving Object Detection
Moving object detection is a well known research
area in computer vision. Many methods have already
been proposed in this field. We classify
contributions reported in literature into four main
categories according to the inter-image processing
they adopt: detection based on Inter-Frame
Difference (IFD), detection based on Background
Modeling (BM), detection based on Optical Flow
(OF), and detection based on Hybrid approaches.
BM methods (Tang, 2007) (Grimson, 1998)
(Elhabian, 2008) are the most popular approach,
they detects moving objects by comparing
background model to each input frame. The
efficiency of the BM methods depends on the ‘ideal
background model’ that is not easy to obtain and
easy to be influenced by the environmental
conditions.
2.2 Shadow Detection and Removal
Shadow is occurred when a direct light from a light
source is blocked by a moving object. In fact, there
are two types of moving shadow: cast and self
shadow (Cucchiara, 2001). Generally, the self
shadow appears in the portion of a moving object
which is not illuminated by direct light. Indeed, the
cast shadow presents the area projected by the
moving object in the direction of direct light.
The moving shadows detected erroneously as
part of foregrounds affect the shape of the real
moving objects and/or can cause occlusion between
them. Thus, moving shadow presents the most
serious problem in the performance of the upper
levels of computer vision applications such as
HCMS. The core problem discussed in literature is
the detection and suppression of cast shadow and not
self shadow since it is a part of the moving object.
Indeed, we classify previous works into two
categories of approaches, according to the decision
process, which are: Statistical (Julio, 2005) (Mikic,
2000) and Determinist (Cucchiara, 2001) (Xiao,
2007). In the statistical approach, probabilistic
functions are used to describe the class membership.
In the determinist approach, an on/off decision is
used to classify each pixel to shadow/non-shadow
pixel. Moreover, two subclasses are presented, the
Determinist Model Based (DM) and Determinist
Non-model Based (DNM). DM methods require a
priori knowledge about shape and motion of objects
such as vehicles or human bodies (Kilge, 1992).
Despite its simplicity, this method cannot be robust
to many variations like illumination, objects shape,
shadow edge. Besides, DNM methods classify pixels
to shadow/non-shadow pixels without any prior
knowledge about the scene (Cucchiara, 2001).
2.3 Tracking
Object tracking is used to estimate the trajectory of
moving objects over time in every frame. However,
the complexity of tracking objects is more
complicated by abrupt object motion, occlusion
between moving objects and/or between background
and foreground objects. Several tracking methods
(Kass, 1988) (Masoud, 2001) (Kanhere, 2006) are
proposed in literature. We distinguish three major
tracking approaches which are: Region-based,
Boundary-based and Feature-based approaches. The
Region-based methods rely on information provided
by the entire region such as texture, size, color,
shape and motion based proprieties using motion
estimation techniques. These methods work well for
small numbers of moving objects. However, they
cannot solve the occlusion problems in dense traffic.
The Boundary-based methods rely on information
provided by the moving objects edges. A good
initialization step is required. We notice that
Boundary-based methods do not work well in
presence of occlusions because the model is strongly
dependent on local-based information that can be
inaccurate. The Feature-based methods perform with
tracking the moving object’s sub-features such as
distinguishable points, lines or corners which are
extracted from the blobs between frames
. Tracking
methods based on features are useful in situations of
ROADGUARD - Highway Control and Management System
633

partial occlusions where only a portion of a moving
object is visible.
3 PROPOSED APPROACH
RoadGuard is based on a set of steps: (1) Moving
region detection to generate foreground mask, (2)
Cast shadow detection to obtain cast shadow pixels
mask, (3) Real moving object detection, (4)
Tracking and counting real moving objects.
Each RoadGuard’s step is detailed in next
sections.
3.1 Moving Region Detection
Accurate segmented moving regions are obtained by
generating moving pixels mask and grouping the
connected foreground pixels.
To detect moving pixels, we have adopted BM
approach. BM methods can be recursive or non-
recursive. The non-recursive methods use a sliding
window to estimate the background. They build a
buffer of frames and estimate the background model
with temporal variation of each pixels value in the
buffer. Besides, the recursive methods update
periodically a simple or multiple background models
for each input frame. Since recursive background
models require less storage, we use the recursive
version of Approximate Median (AM) method
(McFarlane, 1995) to detect moving pixels. This
method is able to deal with illumination and scene
changes.
The AM method presents an accurate technique
for background model updating. It updates
periodically a background model for each input
frame.
This process starts by initializing a reference
with the first input frame. Then, if a pixel in the
current frame has a value larger than the
corresponding background pixel, the background
pixel is incremented by 1. Likewise, if the current
pixel is less than the background pixel, this latter is
decremented by 1. In this way, the background
eventually converges to an estimate value where half
of the input pixels are greater than the background
and the other half is less than the background,
approximately the median.
Moreover, each pixel is classified as belonging to
the foreground (assigned 1) or background (assigned
0) after the updating process. A binary moving
pixels mask (M) is generated by a comparative stage
between the input frame (I) and the background
model (B). This comparative stage is based on a pre-
determined threshold (Th) (for highway sequences
equals to 25).
The obtained foreground pixel masks contain lot
of misclassifications which correspond to cast
shadow pixels detected erroneously as foreground
pixels. This misclassification causes occlusion
between the moving objects
Thus, we present our contribution in detecting
cast shadow in the next section.
3.2 Cast Shadow Detection
In our approach, we identify cast shadow pixels
without using the foreground masks. The basic idea
is to detect all moving shadows in a frame sequence
and then substitute from it the self shadow.
Furthermore, we start by classifying each moving
pixel into shadow/non-shadow. Then, we suppress
the self shadow part from the moving shadow mask.
3.2.1 Automatic Classification
of Moving Pixels
We consider shadow as moving pixels that have
lower intensity value. For that, we adopt three
successive differences to detect it. In fact, we
consider four successive grayscale frames (f), (f-1),
(f-2) and (f-3). Firstly, we perform by differences
between ((f),(f-1)), ((f),(f-2)) and ((f), (f-3)) to
obtain grayscale images I
1
, I
2
and I
3
respectively.
Secondly, we compute for I
1
, I
2
and I
3
the respective
binary masks MI
1
, MI
2
and MI
3
.
Furthermore, we propose an iterative algorithm
to each difference (I
i
). In our algorithm, we define
two classes: (S) for shadow and (NS) for non-
shadow and two variables last and current which
represent respectively the value of the threshold in
last and current rounds.
We proceed by classifying pixels according to
their intensity value. Then, the current value is
updated by taking the median value between the
medians of the two classes S and NS.
We iterate these instructions until the current
value is equal to last value. We notice that the loop
iteration converges rapidly after three or four
iterations. Besides, the moving shadow mask (MI
i
)
is obtained by applying a logical AND between the
three masks: MI
1
, MI
2
and MI
3
. Indeed, pixels of
class S are assigned 1 in MI, 0 otherwise.
3.2.2 Self Shadow Detection
Considering the similarity between visual features of
self and cast shadow pixels, this phase constitutes a
considerable work. We propose to build an
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
634

automatic self shadow detection solution based on a
machine learning approach using a set of manually
classified shadow pixels from highway frames, in
order to generate a predict model, which makes it
possible to classify shadow pixels into two classes:
self shadow and non-self shadow. We are based on
KDD process (Fayyad, 1996) to extract useful
knowledge from volumes data. The general principle
of the classification approach is the following:
{
}
()
C :S self shadow, non self shadow
P S C P
→ς= −
∈→ ∈ς
Let S be the population of shadow pixels to be
classified. To each pixel P of S one can associate a
particular attribute namely; its class label C. C takes
its values in the class of labels (0 for self shadow, 1
non-self shadow).
To do it, firstly, we split our corpus into training
data set and test data set and we identify the
effectiveness shadow pixels features in order to
build a two dimensional table from our training
corpus. Each table row represents a shadow pixel
and each column represents a feature. In the last
column, we save the shadow pixel class (0 or 1).
Brightness, color and edge distortions are the most
exploitable features for describing shadow pixels in
literature. Secondly, we employ supervised learning
to produce a significant predict model. In literature,
there are several techniques of supervised learning,
each having its advantages and drawbacks. So,
among the most criterion to compare supervised
learning techniques is the comprehensibility of the
learned model wish leads us to a well-accepted
techniques, that is, the induction of decision trees
(Hammami, 2006). The SIPINA technique (Zighed,
1996) was used in our work to predict model.
Considering this model, self shadow pixels
(assigned 1 in MI) are restored in the foreground
pixels mask (M).
3.3 Real Moving Object Detection
After the post-processing step on the masks of
foreground (M) and cast shadow (MI), a simple
difference between them leads to get the real moving
objects mask (RMO) without their shadows.
3.4 Tracking and Counting
The control phase of our system is based on tracking
vehicles in a defined region of interest (ROI) and the
emergency area.
We adopt a mean shift tracker based on features
selection method (Nedovic, 2008). Several images
features are computed for the Real Moving Objects
(RMO). These features are classified into two main
classes: color based features and texture based
features. The color based features support the RGB,
HSV and normalized RGB color spaces. The RGB
color space reflects any changes in lighting intensity
and color in the ROM. Normalized RGB (rgb) is
considered as invariant feature to the lighting
intensity changes. The HSV color space is based on
human color perception. The texture features include
co-occurrence matrixes, Gabor filters and Wavelet
packets. Co-occurrence matrixes can distinguish
between region pixels with the same color
distribution and different texture. Both Gabor filters
and Wavelet packets identify a texture changes since
the energy signatures of different textures will be
different.
In the mean-shift tracker, the real moving objects
are characterized by the probability density
functions (pdfs) of their color or texture features.
Unlike the most tracking methods wish use fixed
features as an indicator of the RMO location, the
adopted tracker use an adaptive feature selection. In
fact, the selection issue is seen as a RMO class
discrimination problem. Distribution of the two
classes is estimated by computing their features
histograms. Discriminative power of the features
evaluated independently is based on the variance
ratio measure of likelihood distributions.
We obtain a positive value for RMO features and
a negative one to those corresponding to the
background. The distribution values in the likelihood
images are used as an input to the Augmented
Variance Ratio (AVR). We sort features according
to their AVR score and top N features are used for
tracking the object.
The management phase of the RoadGuard is
based on counting vehicles in highways in order to
obtain statistics information. In fact, we have
implemented an algorithm which counts moving
vehicles based on the enhanced provided masks and
save some important information like the date and
time of overloaded highways. Counting process is
done in the ROI.
The counter is incremented for
each vehicle enters the ROI. Also, we have defined a
number of vehicles (here more than 2) to generate an
alert and save an overloaded event.
4 EXPERIMENTAL RESULTS
In order to validate our system, RoadGuard was
ROADGUARD - Highway Control and Management System
635

evaluated by intensive experiments. We carried out
our study on a set of highway sequences very
referred in researches which are: Highway
i
{i=I,…,V}
1
. These sequences are recorded in typical
conditions that include shadows. This section
presents some results of these experiments.
Since pixels classifications into foreground or
shadow pixels has important effects on performance
of the upper steps of RoadGuard, the evaluation can
be assessed by segmenting manually pixels of
significant frames
1
to compute three global
indicators: (1) Global Error Rate (GER), (2) A Priori
Error Rate (PER) and (3) A Posteriori Error Rate
(PSER). GER is the complement of classification
accuracy rate, while PER (respectively, PSER) is the
complement of the classical recall rate (respectively,
precision rate). We identify two classes A and B
which represent respectively “moving pixel” and
“non-moving pixel”.
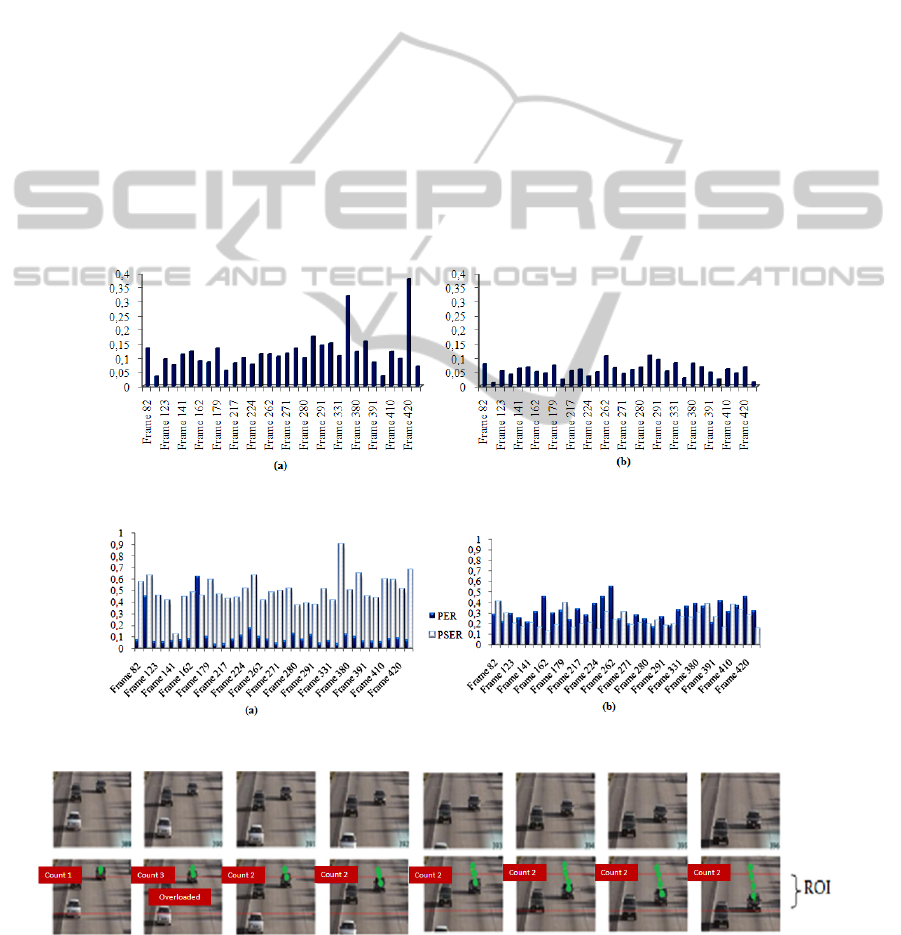
To illustrate the relevance of our system, we
present the obtained results for the set of significant
frames
1
. Figure 1 and Figure 2 show respectively
GER and PER(A)-PSER(A) before and after
suppressing cast shadow.
The aim of cast shadow detection and removal is
to decrease GER and PSER (A). The average value
of the obtained GER in our experiment is decreased
from 12% (88% correct classification) to 5,78%
(94,22% correct classification) after suppressing cast
shadow. Figure 2(a) shows that PSER (A) is almost
the time greater than the PER (A), this means that
the algorithm classify pixels erroneously as moving
ones. These pixels correspond to the cast shadow
pixels. The low PER (A) (average value equal to
17.45%) shows the robustness of the whole system
against the environmental changes. After removing
the cast shadow, the average value of PSER(A) is
decreased from 49.78% to 23.74% which means that
our RoadGuard performs highly in detecting cast
shadow. Thus, a better segmentation of moving
vehicles is provided. These results confirm the
important affect of shadow problem.
The high-quality results given above allow us to
compare our contribution with other existing
techniques. The obtained results are compared to the
best results of each shadow detection approach
represented by well-know methods (Table1) given in
a comparative reviewing (Prat, 2003).
Let ε represents the complement of the global
error rate (GER) and η represents complement of the
a priori error rate (PER) of the shadow pixels class.
1
The Highway video sequences are courtesy of the Computer
Vision and Robotics Research Laboratory at UCSD.
The results show the robustness of our proposed
algorithm against shadow challenge.
The tracker of the RoadGuard is able to draw the
trajectory of a moving object (Figure 3) in spite of
its speed (fast/slow), shape (big/small) or location
(near/far from the camera).
Table 1: Comparative Results.
ε % η %
SNP 81.59 63.76
SP 59.59 84.70
DNM1 69.72 76.93
DNM2 75.49 62.38
Our results 93.51 82.55
Moreover, RoadGuard is able to count vehicles
(Figure 3) and save some important information like
the date and time of overloaded highways.
5 CONCLUSIONS
In this paper, a novel and accurate approach
RoadGuard for Highway Control and Management
System is presented. The system is enough capable
to detect, count and track vehicles in highway while
no scene-specific knowledge is required.
RoadGuard was evaluated with various video files
against different Highway conditions. According to
the presented results, we can conclude that we can
consider RoadGuard as a robust computer vision
application. In fact, our approach combines rapidity
of adaptation in scene changes, a high precision in
moving object detection, performance to detect and
suppress cast shadow and accuracy to count and
track moving vehicles.
REFERENCES
Cucchiara, R., Grana, C., Neri, G., Piccardi, M., Prati, A.,
2001. The Sakbot System for Moving Object
Detection and Tracking. In Video-Based Surveillance
Systems Computer Vision and Distributed Processing.
Elhabian, K., El-Sayed, M., Sumaya, H.A., 2008. Moving
Object Detection in Spatial Domain using Background
Removal Techniques - State-of-Art. In Recent Patents
on Computer Science.
Fayyad, U. M., Piatetsky-Shapiro, G., Smyth, P., 1996.
The kdd process for extracting useful knowledge from
volumes of data. Communications of the ACM
(CACM).
Grimson, Y., Stauffer, C., Romano, R., Lee, L., 1998.
Using adaptive tracking to classify and monitor
activities in a site. In Proc. Conf. Comp. Vision Pat-
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
636
tern Rec.
Hammami, M., Chahir, Y., Chen, L., 2006. WebGuard: A
Web Filtering Engine Combining Textual, Structural,
and Visual Content-Based Analysis. In IEEE
Transaction on Knowledge and Data Engineering.
Julio, C. S. J., Jung, C. R., Musse, S. R., 2005.
Background Subtraction and Shadow Detection in
Grayscale Video Sequences. In Computer Graphics
and Image Processing.
Kanhere, N., Pundlik, S., Birchfield, S., Sarasua, W.,
2006. Vehicle Segmentation and Tracking in the
Presence of Occlusions. In Transportation Research
Board Annual Meeting.
Kass, M., Witkin, A., Terzopoulos, D., 1988. Snakes:
Active contour models. In International J. Computer
Vision.
Kilger, M., 1992. A Shadow Handler in a Video-Based
Real-Time Traffic Monitoring System. In IEEE
Workshop Applications of Computer Vision.
Masoud, O., Papanikolopoulos, N. P., 2001. A novel
method for tracking and counting pedestrians in real-
time using a single camera. In IEEE Trans. Vehicular
Technology.
Mikic, I., Cosman, P., Kogut, G., Trivedi, M.M., 2000.
Moving Shadow and Object Detection in Traffic
Scenes. In Proceeding Int’l Conference Pattern
Recognition.
Nedovic, V., Liem, M., Corzilius, M., Smids, M., 2008.
Kernel-based object tracking using adaptive feature
selection. In technical report, Informatics Institute,
University of Amsterdam.
Prati, A., Mikic, I., Trivedi, M. M., Cucchiara, R., 2003.
Detecting Moving Shadows: Algorithms and
Evaluation. In IEEE Trans. Pattern Analysis and
Machine Intelligence.
Tang, Z., Miao, Z., 2007. Fast Background Subtraction
and Shadow Elimination Using Improved Gaussian
Mixture Model. In IEEE International Workshop on
Haptic, Audio and Visual Environments and Games.
Xiao, M., Han, C. Z., Zhang, L., 2007. Moving Shadow
Detection and Removal for Traffic Sequences. In
International Journal of Automation and Computing.
Zighed, D. A., Rakotomalala, R., 1996. A method for non
arborescent induction graphs. In technical report,
Loboratory ERIC, University of Lyon 2.
Figure 1: GER (a) before and (b) after suppressing the cast shadow.
Figure 2: PER and PSER (a) before and (b) after suppressing the cast shadow.
Figure 3: Results of counting and tracking vehicles in HighwayI.
ROADGUARD - Highway Control and Management System
637
