
EVALUATION OF 3D INTERACTION TECHNIQUES FOR GOOGLE
EARTH EXPLORATION USING NINTENDO WII DEVICES
Takehiko Yamaguchi, Damien Chamaret and Paul Richard
Laboratoire d’Ing
´
enierie des Syst
`
emes Automatis
´
es (LISA), Universit
´
e d’Angers, Angers, France
Keywords:
3D interaction techniques, Navigation, Nintendo Wii, Google Earth, Operation workload.
Abstract:
We present a multi-modal virtual reality broadcasting system to support science education. This system is
based on a web platform using Adobe Flash and enables users to explore Google Earth using the Nintendo
Wii devices. The Google maps Flash API was used to control the user’s avatar. The Wii Remote was used for
zooming and steering and the Wii Balance Board was used for walking. We tested operation workload for 9
different threshold angle combinations. We found a most low workload threshold angle combination of 45
◦
(for zooming out) /-15
◦
(for zooming in) and of 30
◦
(for steering right) /-30
◦
(for steering left). Moreover, we
found overshoot range during actual operation.
1 INTRODUCTION
Virtual reality (VR) technology has become increas-
ingly popular and its applications span a wide va-
riety of different areas that include science educa-
tion (Johnson et al., 2001), medical training (Basdo-
gan et al., 2001), entertainment (Mignonneauand and
Sommerer, 2005).
The wide spread use of this technology has been
primarily limited because of the high cost of VR sys-
tems (Sines and Das, 2001). With the development
of hardware speed, rendering capabilities, and acces-
sible network bandwidth, network-based VR content
has become available at lower costs. Thus, most of
common web animation and game creating tools such
as Adobe Flash (Adobe, 1996), Unity (Unity, 2010)
have supported 3D capabilities. In addition, a number
of toolkits have been released as open-source software
for web applications (Polys, 2007), especially, with
the advent of the Nintendo Wii.
In section 2, present the related work. In section
3, we describe the proposed system. Then, we present
the experiment that was carried out to investigate the
operation workload during a navigation task. In Sec-
tion 5, the results of the experiment are presented and
discussed. Finally, we conclude and give some tracks
for future works.
2 RELATED WORK
Wii devices have been adopted by a number of re-
searchers for a wide variety of applications (Schlomer
et al., 2008). Generally, in case of using The Wii
Remote (WR) for navigation, rotation angles such as
pitch, yaw, and roll information are used. For ex-
ample, Duran (Duran et al., 2009) used the WR for
controlling wheelchair using pitch and yaw move-
ments. Fikkert (Fikkert et al., 2009) proposed inter-
action techniques using the WR and the Wii Balance
Board (WB). Both input devices were used for navi-
gating a maze application. If the direction is set using
rotation angles, threshold rotation angles are set up on
each axis as a trigger. Then, when rotation angle goes
over the threshold the direction is changed. In this
case, user needs to keep his/her angle position within
the threshold. Actually, it is important to consider the
threshold from the ergonomic viewpoint because of
operation workload of direction input. However, this
issue has not been really investigated so far. Before
the main experiment, we carried out a pilot study to
assess the available operation range (AOR) and ana-
lyze the range of zooming and steering operation.
334
Yamaguchi T., Chamaret D. and Richard P..
EVALUATION OF 3D INTERACTION TECHNIQUES FOR GOOGLE EARTH EXPLORATION USING NINTENDO WII DEVICES.
DOI: 10.5220/0003370103340338
In Proceedings of the International Conference on Computer Graphics Theory and Applications (GRAPP-2011), pages 334-338
ISBN: 978-989-8425-45-4
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

3 SYSTEM CONFIGURATION
We have been developing Flash based 3D Google
Earth navigation system which enables user to ex-
plore Google Earth. The navigation / exploration task
consists in controlling an avatar. We used Google
Maps API for Flash (Google, 2005) for the Google
Earth interface, and Nintendo WR and WB as input
devices.
3.1 Hardware Framework
Figure 1 shows the hardware configuration of our sys-
tem. We used a desktop computer, the WR and WB,
and a front projected visual display. The WR and WB
are connected to the PC through a Bluetooth commu-
nication protocol. The WR is equipped with an accel-
eration sensor that allows to measure both pitch and
roll movements. The WB is equipped with 4 force
sensors (top left, top right, bottom left, and bottom
right).
Figure 1: Illustration of the experimental configuration.
3.2 Software Framework
The main interface was developed using Adobe Flash.
We used Google Maps API to display Google Earth
interface and the Papervision3D library to display and
control the avatar. The 3D world developed using Pa-
pervision3D was updated at 40Hz. To control the WR
and WB, we used Wiiyourself! C++ library. Data
from the WR and WB are updated at about 1KHz. To
connect between the C++ native application and the
Flash application, we developed a C++ server appli-
cation (TCP/IP protocol).
4 INTERACTION TECHNIQUES
Three different interaction techniques have been pro-
posed to explore the Google Earth effectively. We de-
fined a surfing mode (Fig. 2) to go straight and stop,
then we defined a zooming mode (Fig. 3) to scale up
and down, and we defined a steering mode (Fig. 4) to
turn left and right.
Figure 2: Illustration of the surfing interaction technique.
Figure 3: Illustration of the zooming interaction technique.
Figure 4: Illustration of the steering interaction technique.
EVALUATION OF 3D INTERACTION TECHNIQUES FOR GOOGLE EARTH EXPLORATION USING NINTENDO
WII DEVICES
335
5 EXPERIMENT
We conducted a pilot testing to determine available
operation range (AOR) of zooming and steering op-
eration before the main experiment. The AOR is a
operation range which a user can have while zooming
and steering without any physical demand. Six sub-
jects tested a simple moving task for 1 minute. We
found that zooming operation has an asymmetric pat-
tern ranging from -25
◦
to 68
◦
(Fig. 3), and steering op-
eration has a symmetric pattern ranging from -56
◦
to
66
◦
(Fig. 4). Therefore, we decided to use nine thresh-
olds angle combinations for the experiment.
5.1 Design and Procedure
The aim of this experiment is to find a best threshold
combinations for zooming and steering operations to
for exploring Google Earth. A total of 14 subjects (be-
tween 19 and 24 years old) participated in the exper-
iment. Each session included 9 trials that contained
3 simple subtasks defined below. After each trial,
NASA-TLX questionnaires were given to each sub-
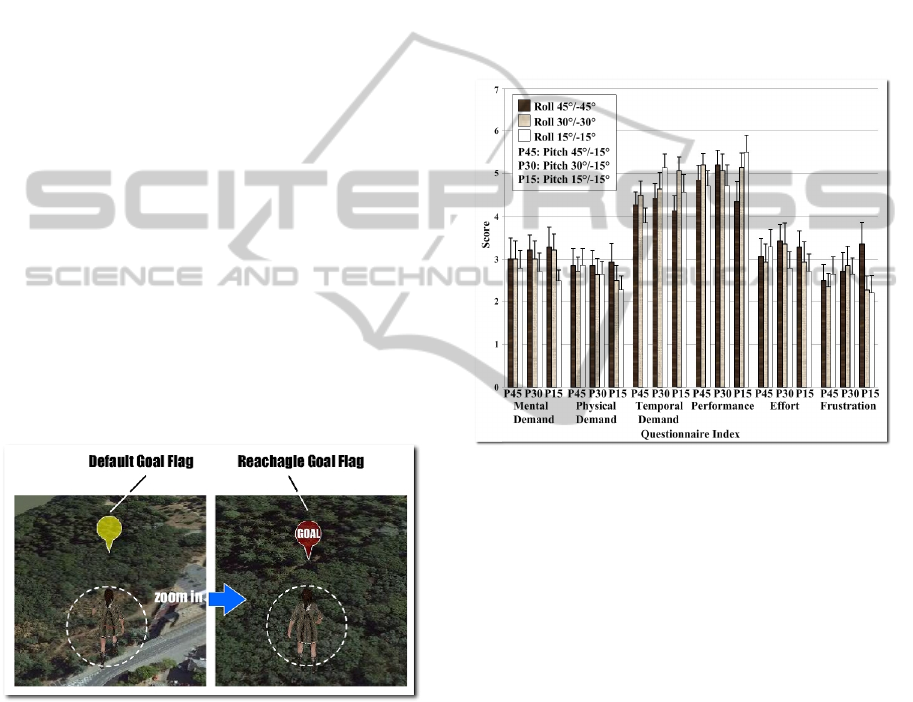
ject. Subject were instructed to find 3 red goal flags
(Fig. 5). When finding a yellow flag on the way, sub-
jects were required to zoom in until the yellow flag
become red. When the yellow flag becomes red, the
subjects had to reach it.
Figure 5: Goal flag status on Google Earth platform.
The subjects had to grab a WR with their dominant
hand and stand on the WB. Then they had to do a
trial to get acquainted with the zooming, s teering, and
surfing interaction techniques. Then the subjects were
instructed to check the threshold angle for zooming
and steering operation , and had to complete the task
which contains the 3 subtasks. They had to repeat
the task 9 times consecutively (9 threshold combina-
tions). Finally, the subjects had to fill out the ques-
tionnaire.
6 RESULTS
6.1 Zooming Interaction Technique
The results of the NASA TLX questionnaires for
zooming interaction technique are shown in Fig. 6.
The ANOVA showed that there were no main effect
for zooming angle/steering angle and no interaction
between these interaction techniques. These results
show that participants were able to do zooming oper-
ation without effect of zooming/steering angle com-
binations.
Figure 6: Result of NASA-TLX for zooming interaction
technique.
6.2 Steering Interaction Technique
The results of the NASA TLX questionnaires for
steering interaction technique are shown in Fig. 7.
The ANOVA showed significant main effect on steer-
ing angle for physical demand (F
(2,26)
= 5.22, p <
0.05), and for performance (F
(2,26)
= 3.74, p < 0.05).
LSD multiple comparison on Physical demand proved
that the effect of steering angle on RC1 was higher
than that of RC2/RC3, but there was no difference
significantly between RC2 and RC3. As for the
LSD multiple comparison on performance, the ef-
fect of steering angle on RC1 was higher than that
of RC2, but there was no difference significantly be-
tween RC2/RC3 and between RC1/RC3. These re-
sults suggest that participants were able to do steer-
ing operation without effect of zooming operation.
However, the steering angle combination affected the
steering operation.
GRAPP 2011 - International Conference on Computer Graphics Theory and Applications
336

Figure 7: Result of NASA-TLX for steering interaction
technique.
Figure 8: Completion time for each sub tasks.
6.3 Completion Time
Results relative to the completion time are illustrated
in Fig. 8 shows the results of the completion time for
each. The ANOVA showed no significant main effect
on zooming angle, steering angle, and no interaction
between these interaction techniques. Since there is
significant effect on the subjective results for steering
operation as showed in the previous subsection, we
expected the completion time supports the significant
effect. However, ANOVA showed no significant as
above. This result suggest that the subjective data are
affected by primitive operation workload more than
accomplishment of whole task so that actual operation
range during experimental task is considered in the
next subsection.
6.4 Overshoot of Operation Range
The results of the distribution of zooming and steer-
ing operation range are illustrated in Fig. 9. The mean
value was calculated to average over threshold oper-
ation angle which is operation angle over the set up
threshold angle. We expected that overshoot would
happen since it is difficult to stop these operations on
the threshold so that the overshoot was happened on
overall tasks as shown in Fig. 9.
Figure 9: Distribution of operation range for each interac-
tion techniques.
Overshoot Range of Zooming Out Operation.
We observed a significant effect on zooming angle
(F
(2,24)
= 8.474, p < 0.01). LSD multiple compari-
son on zooming angle proved that the effect of zoom-
ing angle on PC1 was higher than that of PC2 and
PC3, and there was no difference significantly be-
tween PC2 and PC3. The results show that the over-
shoot range has expanded as the set up threshold be-
comes small.
Overshoot Range of Zooming In Operation. The
ANOVA showed that there were no main effect for
zooming and steering angle and no interaction be-
tween these interaction technique. Since the set up
threshold was -15
◦
on all of angle combinations, there
was no significant difference. According to the mini-
mum operation angle which we measured in the pilot
testing as mentioned in the Introduction, it was -25
◦
.
Therefore, the effect of overshoot range is limited in
about 10
◦
.
Overshoot Range of Steering Left Operation.
The ANOVA showed significant main effect on steer-
ing angle (F
(2,24)
= 32.134, p < 0.01). LSD multiple
EVALUATION OF 3D INTERACTION TECHNIQUES FOR GOOGLE EARTH EXPLORATION USING NINTENDO
WII DEVICES
337

comparison on steering angle proved that the effect of
steering angle on RC1 was higher than that of RC2
and RC3. The effect on RC2 is higher than that on
RC3. The results show that the overshoot range has
expanded as the set up threshold becomes small since
the overshoot value was higher than that of the zoom-
ing operation. We estimate that the ratio of overshoot
affected subjective workload.
Overshoot Range of Steering Right Operation.
The ANOVA showed significant main effect on steer-
ing angle (F
(2,24)
= 100.303, p < 0.01). LSD multiple
comparison on steering angle proved that the effect of
steering angle on RC1 was higher than that on RC2
and RC3, and the effct on RC2 is higher than that on
RC3. The results show that the overshoot range has
expanded as the set up threshold becomes small and
estimate that the ratio of overshoot affected subjective
workload as with the result of overshoot of steering
left operation since the steering operation has sym-
metric operation pattern.
Effect of Overshoot for Operation. Even if the
operation range includes the overshoot behavior, we
could expect that there are no significant effect on
subjective and on objective data as long as the op-
eration range work within available operation range.
However actual task includes contiguous action of
each interaction technique. For example, when a user
action frequently shifts from zooming in operation to
zooming out operation, overshoot affects start time of
next action as a delay time so that this suggest that
the delay time affects subjective view and task perfor-
mance. Moreover, in case of that the user causes er-
ror behavior, the overshoot also affects reaching time
which is a time until user reaches target zooming level
or steering direction.
7 CONCLUSIONS
The goal of this study is to find available operational
range (OOR) for low operation workload associated
with zooming and steering action using the Wii Re-
mote. We investigated actual operation pattern and
carried out and experiment which mixed zooming and
steering operation. We found no effect of zooming
angle combinations and steering angle combinations
as for the zooming operation. However, steering an-
gle combination affected the result of physical de-
mand and performance. We found no significant ef-
fect on the completion time for all conditions. How-
ever, we observed overshoot values for steering oper-
ation higher than that of the zooming operation. We
believe that this result affect the physical demand and
performance workload. Moreover, we found that the
overshoot range has expanded as the set up threshold
becomes small. As a result from the subjective and
performance data, we defined the OOR: for zooming
operation is between -15
◦
and 45
◦
, and for steering op-
eration is between -30
◦
and 30
◦
. As future work will
will try to improve the OOR by considering feedback
information.
REFERENCES
Adobe (1996). Adobe flash. http://www.adobe.com/
products/flash/.
Basdogan, C., Chih-hao, H., and Srinivasan, M. A. (2001).
Virtual environments for medical training:graphical
and haptic simulation of laparoscopic common bile
duct exploration. In IEEE/ASME Transactions on
mechatronics, Vol.6, No.3 .
Duran, L., Fernandez-Carmona, M., Urdiales, C., Peula,
J. M., and Sandoval, F. (2009). Conventional joy-
stick vs. wiimote for holonomic wheelchair control.
In IWANN ’09 Proceedings of the 10th International
Work-Conference on Artificial Neural Networks.
Fikkert, W., Hoeijmakers, N. van der Vet, P., and Nijholt, A.
(2009). Navigating a maze with balance board and-
wiimote. In 3rd International Conference on Intelli-
gent Technologies for Interactive Entertainment (IN-
TETAIN 09).
Google (2005). Google maps api for flash. http://code.
google.com/intl/en/apis/maps/documentation/flash/3d-
maps.html.
Johnson, A., Moher, T., Ohlsson, S., and Leigh, J.
(2001). Exploring multiple representations in ele-
mentary school science education. In Virtual Reality,
2001. Proceedings. IEEE.
Mignonneauand, L. and Sommerer, C. (2005). Designing
emotional, metaphoric, natural and intuitive interfaces
for interactive art, edutainment and mobile communi-
cations. In Computers & Graphics 29, p.p837851.
Polys, N. F. (2007). Parallel realities? the requirements of
web3d and immersive vr. In IEEE VR Workshop 2007:
Future Standards for Immersive VR.
Schlomer, T., Poppinga, B., Henze, N., and Boll, S. (2008).
Gesture recognition with a wii controller. In Proc.
of the 2nd International Conference on Tangible and
Embedded Interaction (TEIf 08).
Sines, P. and Das, B. (2001). Vrsemlab: A low cost virtual
reality system to illustrate complex concepts involving
spatial relationships. In Vol.5, No. 1, The International
Journal of Virtual Reality.
Unity (2010). Unity. http://www.unity3d.com.
GRAPP 2011 - International Conference on Computer Graphics Theory and Applications
338
