
TEXTURE CLASSIFICATION USING SPARSE K-SVD TEXTON
D
ICTIONARIES
Muhammad Rushdi and Jeffrey Ho
Computer and Information Science and Engineering, University of Florida, Gainesville, U.S.A.
Keywords:
Texture classification, Texton, Sparse representation, Image dictionary.
Abstract:
This paper addresses the problem of texture classification under unknown viewpoint and illumination vari-
ations. We propose an approach that combines sparse K-SVD and texton-based representations. Starting
from an analytic or data-driven base dictionary, a sparse dictionary is iteratively estimated from the texture
data using the doubly-sparse K-SVD algorithm. Then, for each texture image, K-SVD representations of pixel
neighbourhoods are computed and used to assign the pixels to textons. Hence, the texture image is represented
by the histogram of its texton map. Finally, a test image is classified by finding the closest texton histogram
using the chi-squared distance. Initial experiments on the CUReT database show high classification rates that
compare well with Varma-Zisserman MRF results.
1 INTRODUCTION
The problem of classifying texture images under un-
known viewpoint and illumination variations is a
challenging task. The difficulty of the problem stems
from several facts. Firstly, images of the same mate-
rial with large variations of the pose, illumination, or
scale may appear so different even for a human ob-
server. Secondly, techniques that are accurate, adapt-
able and fast need to be developed to predict cor-
rectly the classes of new texture images in a reason-
able amount of time.
Indeed, a lot of work has been done in the area
of texture classification (Davies, 2008), (Varma and
Zisserman, 2009), (Liu et al., 2009), (Zhao and
Pietikainen, 2006), (Leung and Malik, 2001), (Cula
and Dana, 2001). Leung and Peterson (Leung and
Peterson, 1992) used moment-invariant and log-polar
features to classify texture. Kang (Kang and Na-
gahashi, 2005) developed a framework for scale-
invariant texture analysis using multi-scale local au-
tocorrelation features. Dana et al created the CUReT
database (Dana et al., 1999) which contains texture
images for 61 categories where each category is rep-
resented by 205 images of different viewing and il-
lumination conditions. Varma and Zisserman devel-
oped several texture classifiers based on filter banks
(Varma and Zisserman, 2002) and image patch ex-
emplars (Varma and Zisserman, 2009). Hayman et
al (Hayman and Eklundh, 2004) created the KTH-
TIPS texture database (Fritz and Eklundh, 2004) that
samples texture at multiple illumination, poses and
scales. As well, they devised an SVM-based approach
to classify texture.
Our contribution in this paper is to introduce a
novel texture classification algorithm that combines
the sparse K-SVD representation with texton-based
systems. We give some background materials, ex-
plain our method, then report the results of our ex-
periments.
2 BACKGROUND
2.1 Sparse K-SVD Algorithm
Elad et al (Rubinstein et al., 2010) define a model
for sparse signal representation, the sparse dictionary
model, where the signal dictionary D is decomposed
into a pre-specified base dictionary Φ and a sparse
dictionary A
D = ΦA.
(1)
In this model, let the sparse signal representation γ
has a maximum of t non-zero elements. As well, each
column of A is normalized and has a maximum of
p non-zero elements. To train a sparse dictionary, we
need to approximatelysolve the optimization problem
187
Rushdi M. and Ho J..
TEXTURE CLASSIFICATION USING SPARSE K-SVD TEXTON DICTIONARIES.
DOI: 10.5220/0003376101870193
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2011), pages 187-193
ISBN: 978-989-8425-47-8
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

minimize
A,Γ
kX− ΦAΓk
2
F
subject to
∀i kΓ
i
k
0
0
≤ t
∀ j ka
j
k
0
0
≤ p, kΦa
j
k
2
= 1.
(2)
In this expression, the columns of Γ are the sparse K-
SVD representations of the corresponding columns of
the dataset X, and the function k.k
0
0
counts the non-
zero entries of a vector. Solving this problem is car-
ried out by alternating sparse-coding and dictionary
update steps for a fixed number of iterations. The
sparse-coding step can be efficiently implemented
using orthogonal matching pursuits (OMP) (Davis
et al., 1997). The sparse dictionary model strikes a
balance between complexity (via the choice of the
base dictionary Φ) and adaptability (via the training
of the sparse dictionary A). As well, training the
sparse dictionary is less time-consuming, less prone
to noise and instability, and more computationally ef-
ficient than that of explicit dictionaries. This what
makes this model appealing for pattern recognition
tasks.
2.2 Varma-Zisserman Texture Classifier
Varma and Zisserman introduced a texture classifier
based on image patch exemplars (Varma and Zisser-
man, 2009). This approach can be summarized as fol-
lows. Firstly, all images are made zero-mean and unit-
variance. Secondly, image patches of N × N window
size are taken and reordered in N
2
-dimensional fea-
ture space. Thirdly, image patches are contrast nor-
malized using Weber’s law
F(x) ← F(x)[log(1+ L(x)/0.03)]/L(x)
(3)
where L(x) = kF(x)k
2
is the magnitude of the patch
vector at that pixel x. Fourthly, all of the image
patches from the selected training images in a tex-
ture class are aggregated and clustered using the k-
means algorithm. The set of the cluster centres from
all classes form the texton dictionary. Fifthly, training
(and testing) images are modelled by the histogram of
texton frequencies. Finally, novel image classification
is achieved by nearest-neighbour matching using the
χ
2
statistic. This classifier is known as the joint clas-
sifier. One important variant of the joint classifier is
the MRF classifier which explicitly models the joint
distribution of the central pixels and their neighbours.
Refer to (Varma and Zisserman, 2009) for further de-
tails.
3 SPARSE K-SVD
TEXTON-BASED TEXTURE
CLASSIFIER
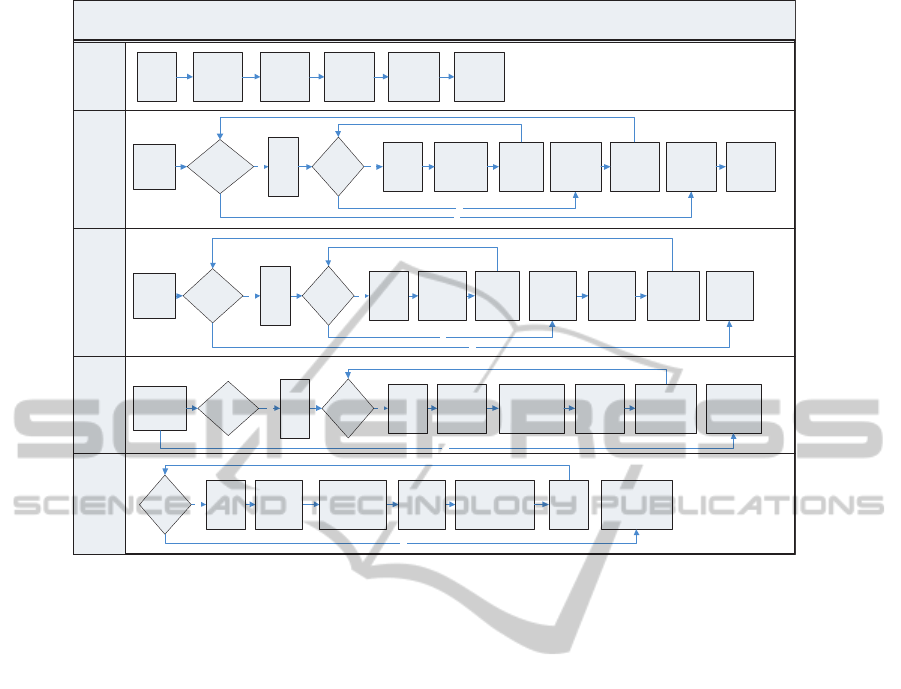
Our goal is to build a texture classification system us-
ing a combination of sparse-coding and texton tech-
niques. A cross-functional flowchart of the system is
shown in Figure 1. The flowchart consists of the fol-
lowing stages:
3.1 Parameter Setup
Several parameters need to be specified for the sparse
K-SVD algorithm. These parameters include the
block (or window) size, the base dictionary size and
model, the sparse dictionary size, the sparsity of the
sparse dictionary with respect to the base dictionary,
the sparsity of the image patch K-SVD representa-
tion with respect to the sparse dictionary, the sparse-
coding criteria (sparsity-based or error-based), the
number of iterations for estimating the sparse dictio-
nary. Refer to (Rubinstein et al., 2010) for further
information on these parameters. As well, for classi-
fication with textons, we need to specify the window
size (which must be the same as the K-SVD block
size), the size of the texton dictionary, and the num-
ber bins for the MRF variant of the Varma-Zisserman
classifier.
3.2 Building the Base Dictionary
In this work, we focus on separable base dictionaries
since theyhavecompact representation, sub-quadratic
implementation, and memory-efficient computation.
A separable dictionary is the Kronecker product of
several one-dimensional dictionaries. We consider
here two types of these dictionaries: analytic and
data-driven dictionaries. Analytic dictionaries are de-
fined using standard signal bases like the DCT, over-
complete DCT, and wavelet dictionaries. Data-driven
dictionaries are generated from the given image data
using some clustering schemes such as k-means clus-
tering, or median-based clustering. Specifically, for
each category c,1 ≤ c ≤ C where C is the number
of texture classes, we sample image blocks from all
of training images, convert the blocks into columns,
apply Weber’s law to contrast-normalize the columns
(Varma and Zisserman, 2009), and then we apply the
clustering scheme to find the class-specific base dic-
tionary Φ
c
. Then, we concatenate the class-specific
base dictionaries to get the overall base dictionary Φ
Φ = [Φ
1
|Φ
2
|...|Φ
C
].
(4)
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
188
KSVD-Based Texture Classification
Compare Test and
Training Maps
Create Training
Texton Maps
Create Sparse Dictionary Create Base Dictionary
Set KSVD
Parameters
Set
block
size
Set sparse
dictionary
size
Set base
dictionary
size and
model
Set signal
and
dictionary
sparsities
Set sparse
coding
criteria
Set
memory
usage
level
Initialize
Base
dictionary
More
categories?
More
Images?
Y
Get next
image
Normalize
image
Y
Set image
blocks as
columns
N
Get class-
specific
base
dictionary
Get
next
class
Update
global
base
dictionary
N
Factor
global
base
dictionary
Save
Global
base
dictionary
Y Y
N
Get next
image
Set image
blocks as
columns
Update
global
sparse
dictionary
More
Images?
Initialize
sparse
dictionary
Normalize
image
Get class-
specific
sparse
dictionary
More
categories?
Get
next
class
Get class-
specific
texton
dictionary
Get global
KSVD
texton
dictionary
N
Y Y
Initialize
training
histograms
Get
next
class
Find KSVD
representation
Normalize
image
Get next
image
Compute
texton
histogram
More
Images?
Update
class-specific
histogram set
Save global
histogram
training set
N
Y
Find KSVD
representation
Compute
texton
histogram
Normalize
image
Get next
image
Find the Chi-
Squared distance
to all training
histograms
More
Images?
Find the
output
class
Compute
confusion matrix
and total
success rate
N
More
categories?
Figure 1: Cross-functional block diagram of the Sparse K-SVD Texton-Based Texture Classifier.
In Section 4, we give more details on creating data-
driven dictionaries and subsequently converting them
into separable forms.
3.3 Building the Sparse Dictionary
Once the separable base dictionary is generated (an-
alytically or from data), we move on to estimating a
sparse dictionary of the texture data with some spar-
sity level p. To guarantee that each texture category
is fairly represented in the sparse dictionary, we esti-
mate a sub-dictionary for each category then join the
sub-dictionaries to from the whole sparse dictionary.
Specifically, for each category c,1 ≤ c ≤ C whereC is
the number of texture classes, we estimate a solution
of the optimization problem
minimize
A
c
,Γ
c
kX
c
− ΦA
c
Γ
c
k
2
F
subject to
∀i kΓ
c
i
k
0
0
≤ t
∀ j ka
c
j
k
0
0
≤ p, kΦa
c
j
k
2
= 1.
(5)
then we concatenate the class-specific dictionaries to
get the overall sparse dictionary A
A = [A
1
|A
2
|...|A
C
].
(6)
3.4 Building the Texton Dictionary
We generate a texton dictionary of the texture data as
follows. Firstly, for each category c,1 ≤ c ≤ C where
C is the number of texture classes, we apply a cluster-
ing algorithm to find the centroids of the texture class.
Secondly, we join all of the class-specific centroids to
form the texton dictionary X
textons
. Thirdly, we apply
sparse-coding techniques (e.g. orthogonal matching
pursuit) to X
textons
to find the corresponding K-SVD
representation Γ
textons
Γ
textons
= argmin
Γ
kX
textons
− ΦAΓk
2
F
subject to ∀ikΓ
i
k
0
0
≤ t.
(7)
Note that the size of the texton dictionary should be
small to get reasonable processing times for test tex-
ture images.
3.5 Computing the Image Texton
Histograms
For each training or test image, we follow a texton-
based approach to find the texton histogram of the im-
age. Firstly, we convert each pixel and its neighbour-
hood into a column. Secondly, we sparse-code the
TEXTURE CLASSIFICATION USING SPARSE K-SVD TEXTON DICTIONARIES
189

columnized neighbourhood x
mn
by solving the mini-
mization problem
γ
mn
= argmin
γ
kx
mn
− ΦAγk
2
2
subject to kγk
0
0
≤ t.
(8)
Thirdly, we assign each pixel to the closest texton in
the texton dictionary. Indeed, the Euclidean distance
is measured between the K-SVD representation γ
mn
of
the pixel neighbourhood and each element of the K-
SVD representation of the texton dictionary Γ
textons
.
This step produces the texton map of the image. Fi-
nally, we compute the frequency histogram of the tex-
ton map with respect to the textons. This produces a
vector with a length equal to the size of texton dic-
tionary. Alternatively, a texture image may be rep-
resented by an MRF model (Varma and Zisserman,
2009).
3.6 Classifying Test Images
Given a test texture image, its texton frequency his-
togram is computed as described above. Then the dis-
tances between this histogram and all of the training
image texton histograms are measured using the χ
2
statistic where
χ
2
(x,y) =
1
2
∑
i
(x
i
− y
i
)
2
x
i
+ y
i
.
(9)
4 CONSTRUCTION OF
DATA-DRIVEN SEPARABLE
IMAGE DICTIONARIES
As we mentioned in Section 3.2, a separable im-
age dictionary may be found from data by applying
clustering methods then approximating the resulting
dictionary by a Kronecker product of 1D dictionary
components. One advantage of this base dictionary
construction approach is that the resulting dictionary
closely represents the population of texture classes.
This is in contrast to an analytic dictionary (e.g. DCT
or wavelets) that might be too generic to represent
the texture data set. A second advantage can be real-
ized if we use clustering schemes that represent each
cluster by one of its members (e.g. k-Medoids algo-
rithms). In this case, representations of image patches
and sparse dictionary atoms will have a direct physi-
cal interpretation in terms of actual points in the tex-
ture data. Now, we give further implementation de-
tails of this base dictionary construction approach.
4.1 Clustering Approaches for Image
Dictionaries
There are numerous clustering approaches in the
literature (Duda et al., 2001), (Theodoridis and
Koutroumbas, 2009). We will focus here on two of
them: k-means, and k-medoids algorithms. The k-
means algorithm is a popular and well-known algo-
rithm. It aims to move the cluster representatives
θ
j
, j = 1,...,M (where M is the number of clusters)
into regions that are dense in points of the dataset
X by minimizing the sum of squared Euclidean dis-
tances between vectors x
i
,i = 1,...,N (where N is the
number of data points) and cluster means θ
j
. The k-
means algorithm is computationally simple and works
well for large datasets. However, the k-means algo-
rithm is sensitive to outliers and noise. As well, k-
means is not suitable for data with nominal or finite
discrete-valued domains.
Another family of clustering algorithms is the k-
medoids algorithms. In the k-medoids methods, each
cluster is represented by a vector selected among the
elements of X, which is usually referred to as the
medoid. These methods overcome the problems of
k-means. First, k-medoids methods are applicable to
data sets from both continuous and discrete domains.
Second, k-medoids methods are less sensitive to out-
liers and noise. However, these methods are more
computationally demanding than k-means. In particu-
lar, a basic version of the k-medoidsmethods, the Par-
titioning Around Medoids (PAM) algorithm, is pro-
hibitively slow and memory-intensive for clustering
of large datasets. To avoid this problem, another vari-
ant of the k-medoids methods, the Clustering LARge
Applications (CLARA) algorithm, exploits the idea of
randomized sampling in the following way. CLARA
draws randomly a sample X
′
of size N
′
from the en-
tire data set X and then determines the set Θ
′
that best
represents X
′
using the PAM algorithm. The rationale
behind CLARA is that if the sample X
′
is statistically
representative of X , then the set Θ
′
will be a satis-
factory approximation of the set Θ of the medoids
that would result if the PAM algorithm was run on
the whole dataset X (Theodoridis and Koutroumbas,
2009).
4.2 Approximation of Separable
Dictionaries with Kronecker
Products
Once a data-driven dictionary is constructed by clus-
tering, we need to convert it into a separable form.
This can be achieved by approximating the dictionary
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
190

as the Kronecker product of 1D dictionaries. This
problem can be stated as follows. Let the base dictio-
nary Φ ∈ R
m×n
be an m-by-n matrix with m = m
1
m
2
and n = n
1
n
2
. We need to solve the minimization
problem
minimize
Φ
0
,Φ
1
kΦ− Φ
0
⊗ Φ
1
k
2
F
subject to
Φ
0
∈ R
m
1
×n
1
Φ
1
∈ R
m
2
×n
2
.
(10)
Loan and Pitsianis (Loan and Pitsianis, 1993) approx-
imately solve this problem as follows. Firstly, it is
shown that this problem is equivalent to
minimize
Φ
0
,Φ
1
kR (Φ) − vec(Φ
0
)vec(Φ
1
)
T
k
2
F
subject to
Φ
0
∈ R
m
1
×n
1
Φ
1
∈ R
m
2
×n
2
(11)
where R (Φ) is the column rearrangement of Φ (rela-
tive to the blocking parameters m
1
,m
2
,n
1
, and n
2
) and
vec(Φ
0
),vec(Φ
1
) are columnized arrangements of Φ
0
and Φ
1
, respectively.
Secondly, if
˜
Φ = R (Φ) has singular value decompo-
sition
U
T
˜
ΦV = Σ = diag(σ
i
)
(12)
where σ
1
is the largest singular value, and U(:,1),V(:
,1) are the corresponding singular vectors, then the
matrices Φ
0
∈ R
m
1
×n
1
,Φ
1
∈ R
m
2
×n
2
defined by
vec(Φ
0
) = σ
1
U(:, 1)
vec(Φ
1
) = V(:,1)
(13)
minimize kΦ − Φ
0
⊗ Φ
1
k
2
F
(Golub and Loan, 1989).
5 EXPERIMENTS AND RESULTS
5.1 Experimental Texture Data
We performed our texture classification experiments
on the Columbia-Utrecht Reflectance and Transmis-
sion (CUReT) texture image database (Dana et al.,
1999). The database contains images of 61 texture
materials. Each material has 205 images taken un-
der different viewing and illumination conditions. In
(Varma and Zisserman, 2009), Varma and Zisserman
picked a subset of 92 images for each class. For this
subset, a sufficiently large portion of the texture is vis-
ible across all materials. A central 200× 200 region
was cropped from each of the selected images and the
remaining background was discarded. The selected
regions where converted to gray scale, then normal-
ized to zero-mean and unit-variance. This cropped
CUReT database (Varma and Zisserman, 2009) has a
total of 61× 92 images. We use this cropped CUReT
database in our experiments. For each class, 46 im-
ages are randomly chosen for training and the remain-
ing 46 are used for testing.
5.2 Implementation Details
As we mentioned in Section 3, several parame-
ters needs to be experimentally set in our system.
Based on experiments, we found reasonable operat-
ing ranges for some parameters as follows. The size
of the base dictionary was set between 80 and 400 de-
pending on the sparse dictionary size. Much larger
base dictionary adversely affected the performance.
The sparsity of the sparse dictionary was set to values
between 7 and 10 depending on the sizes of the base
and sparse dictionaries. Sparsity of the K-SVD repre-
sentation vectors was set between 11 and 15 depend-
ing on the size of the sparse dictionary. The number
of training iterations was fixed at 30. A block size
of 8 × 8 was chosen as it gave the best classification
rate. A sparsity-based sparse-coding (SC) was found
to give better results than error-based criteria. For the
texton dictionary, 10 textons per class were computed
giving a total of 61 × 10 = 610 textons. Increasing
the texton beyond this increased the complexity with
negligible improvement in performance. We tested
both the joint and the MRF classifier variants of the
Varma-Zisserman classifiers. We eventually chose to
focus on the MRF variant as it consistently exhibited
better performance. The number of MRF bins was set
to 90. For the CLARA clustering method, 10 random
samples were drawn from the data to find the cluster
medoids. The size of the drawn sample was set to
N
′
= 40+ 2M where M is the number of base dictio-
nary clusters (set between 4 and 7 per class).
5.3 Base Dictionary Model Selection
For the K-SVD base dictionary model, we tried stan-
dard DCT dictionaries , and data-driven dictionaries
generated by the CLARA clustering method (as de-
scribed in Section 4). As we can see from Table
1, using a DCT base dictionary gives better results
than the data-driven CLARA base dictionary. Our in-
terpretation is that the DCT base dictionary covers a
wider range of image structures than the clustering-
based dictionary that we used. This can be verified
by visualizing both dictionaries and their respective
sparse dictionaries. Figures 2, 3 show sample atoms
of the base dictionaries and the corresponding sparse
dictionaries for best DCT and CLARA results of Ta-
ble 1. It is clearly noticeable that the DCT has more
image structures than the CLARA dictionary. This
TEXTURE CLASSIFICATION USING SPARSE K-SVD TEXTON DICTIONARIES
191
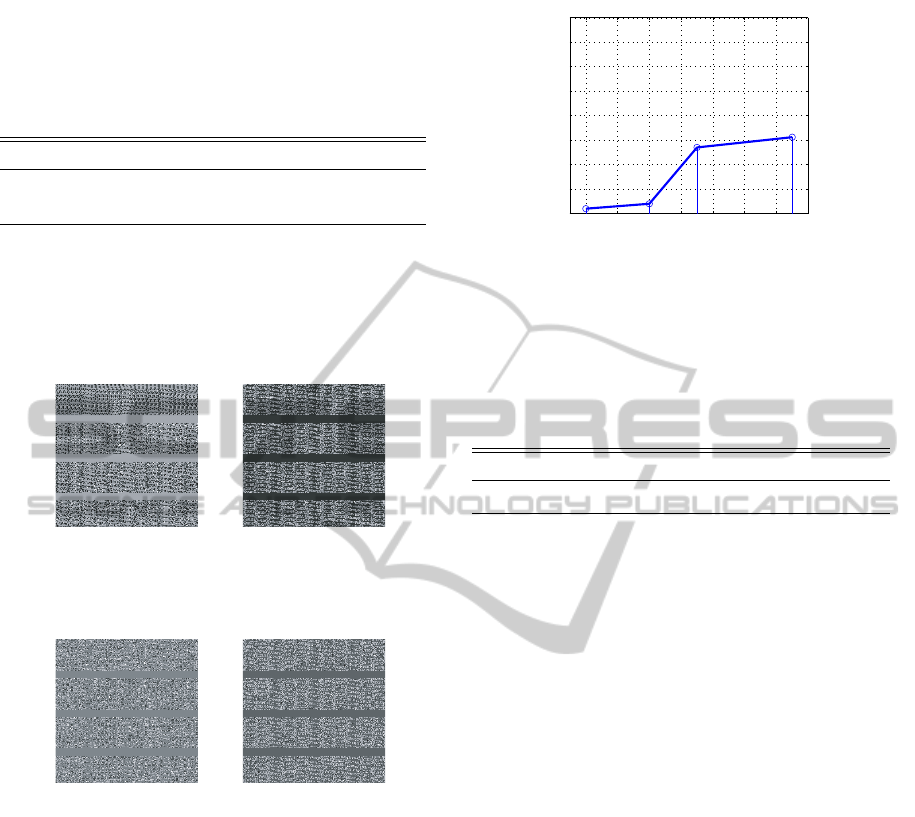
Table 1: Comparison of the classification performance of
the sparse K-SVD texture classifier for different choices of
base dictionary construction method (DCT versus CLARA)
and different values of the per-class sparse dictionary size.
Given the 61 CUReT classes, the total sparse dictionary
sizes are 2× 61 = 122 and 9× 61 = 549, respectively.
Per-class A size / Φ Method DCT CLARA
2 92.19% 91.80%
9 94.62% 92.48%
in turn is reflected on the richness of the associated
sparse dictionaries. We still think that data-driven
base dictionaries constitute a good choice if the un-
derlying data is well-chosen to cover the texture data
variability. We plan to examine this in future work.
Base Dictionary Sparse Dictionary
Figure 2: Sample atoms from the DCT base dictionary and
its corresponding sparse dictionary for the best DCT-based
result of Table 1.
Base Dictionary Sparse Dictionary
Figure 3: Sample atoms from the CLARA base dictio-
nary and its corresponding sparse dictionary for the best
CLARA-based result of Table 1.
5.4 Spare Dictionary Sizing
The sparse dictionary A size is particularly impor-
tant since it widely affects the running time during
dictionary learning, training, and testing. As well,
this dictionary size clearly affects the classification
rate (as shown in Figure 4). The best classifica-
tion rate of 95.12% is achieved at a dictionary size
of 15 × 61 = 915. Increasing the sparse dictionary
size beyond that would give better results but at a high
computational cost.
5.5 Comparison to other Work
Table 2 compares our method with the Varma-
Zisserman patch-based classifiers. Despite that our
2 4 6 8 10 12 14 16
92
93
94
95
96
97
98
99
100
Perclass Sparse Dictionary Size
Classification Rate
Figure 4: Effect of the per-class sparse dictionary size on
the overall classification rate. The best classification rate of
95.12% is achieved at a dictionary size of 15× 61 = 915.
Table 2: Comparison of the classification performance of
our method with the Varma-Zisserman patch-based classi-
fiers. Despite that our method is slightly sub-optimal it has
other advantages such as design flexibility, immunity to out-
liers, sparse representation, and physical interpretation.
Ours VZ Joint VZ Neighbour VZ MRF
95.12% 96.16% 96.08 % 97.47%
method is slightly sub-optimal, it has some potential
advantages that are mainly inherited from the sparse
K-SVD structure. First, complexity can be well mod-
elled through the choice of an analytic or a data-
driven base dictionary. Second, adaptability to data
is achieved through training of the sparse dictionary
component. Third, the sparse representation reduces
the space and time computational complexities. Fi-
nally, sparse signals and dictionary atoms can be as-
cribed direct interpretations in terms of few base dic-
tionary elements. We explore these ideas further in
future work.
6 CONCLUSIONS AND FUTURE
WORK
We introduced a novel texture classification algorithm
that combines the sparse K-SVD representation with
texton-based systems. Our system carries the benefits
of the sparse K-SVD algorithm into the texture clas-
sification problem: sparse representation, adaptabil-
ity to data, and efficient computation. In particular,
we explored the idea of using data-driven base dictio-
naries instead of standard analytical ones to represent
more specialized texture data. Results of the simula-
tions and experiments show that our system closely
matches the state-of-the-art algorithms. In the future,
we will focus on performing better design of the base
and sparse dictionaries. As well, we pursue methods
for optimal parameter selection.
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
192

REFERENCES
Cula, O. and Dana, K. (2001). Compact representation of
bidirectional texture functions. volume 1, pages I–
1041 – I–1047 vol.1.
Dana, K., Van-Ginneken, B., Nayar, S., and Koenderink,
J. (1999). Reflectance and Texture of Real World
Surfaces. ACM Transactions on Graphics (TOG),
18(1):1–34.
Davies, E. (2008). Handbook of Texture Analysis, chap-
ter Introduction to Texture Analysis. Imperial College
Press.
Davis, G., Mallat, S., and Avellaneda, M. (1997). Greedy
adaptive approximation. J. Constr. Approx., 13:57–98.
Duda, R., Hart, P., and Stork, D. (2001). Pattern Classifica-
tion. Wiley.
Fritz, M., H. L. C. B. and Eklundh, J.-O. (2004). The
kth-tips database. available at www.nada.kth.se/cvap/
databases/kth-tips.
Golub, G. and Loan, C. V. (1989). Matrix Computations.
John Hopkins Press.
Hayman, L., C. B. and Eklundh, J.-O. (2004). On the sig-
nificance of real-world conditions for material classi-
fication. In 8th European Conference on Computer
Vision, pages 253–266.
Kang, Y., M. K. and Nagahashi, H. (2005). Scale Space
and PDE Methods in Computer Vision, volume 3459,
chapter Scale Invariant Texture Analysis Using Multi-
scale Local Autocorrelation Features, pages 363–373.
Springer.
Leung, M. and Peterson, A. (1992). Scale and rotation
invariant texture classification. In The Twenty-Sixth
Asilomar Conference on Signals, Systems and Com-
puters, volume 1, pages 461–465.
Leung, T. and Malik, J. (2001). Representing and recog-
nizing the visual appearance of materials using three-
dimensional textons. International Journal of Com-
puter Vision, 43.
Liu, G., Lin, Z., and Yu, Y. (2009). Radon representation-
based feature descriptor for texture classification. Im-
age Processing, IEEE Transactions on, 18(5):921 –
928.
Loan, C. V. and Pitsianis, N. (1993). Approximation with
kronecker products. In Linear Algebra for Large Scale
and Real Time Applications, pages 293–314. Kluwer
Publications.
Rubinstein, R., Zibulevsky, M., and Elad, M. (2010). Dou-
ble sparsity: Learning sparse dictionaries for sparse
signal approximation. Signal Processing, IEEE Trans-
actions on, 58(3):1553 –1564.
Theodoridis, S. and Koutroumbas, K. (2009). Pattern
Recognition, 4th Edition. Academic Press.
Varma, M. and Zisserman, A. (2002). Classifying images of
materials: Achieving viewpoint and illumination inde-
pendence.
Varma, M. and Zisserman, A. (2009). A statistical ap-
proach to material classification using image patch ex-
emplars. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 31(11):2032–2047.
Zhao, G. and Pietikainen, M. (2006). Local binary pattern
descriptors for dynamic texture recognition. volume 2,
pages 211 –214.
TEXTURE CLASSIFICATION USING SPARSE K-SVD TEXTON DICTIONARIES
193
