
A SIMPLE AND EFFICIENT CONTROL ARCHITECTURE
FOR WALKING ROBOTS
Application to AMRU5
Q. Bombled, O. Verlinden
Department of Theoretical Mechanics, Dynamics and Vibrations (TMDV), University of Mons
Place du Parc 20, 7000 Mons, Belgium
M. Bagein, P. Manneback
Department of Computer Science, University of Mons, Place du Parc 20, 7000 Mons, Belgium
Keywords:
Distributed control, Real-time Linux real-time, PIC microcontrollers, UDP/IP communication, Walking robot.
Abstract:
A decentralized control architecture has been developed on the walking machine AMRU5. The vehicle is
actuated by 18 DC motors, which have to be highly synchronized to produce a smooth motion of the robot
body. Each leg has 3 motors driven by a microcontroller. The six microcontrollers communicate with a PC
running real-time Linux which manages the feet motion generation to produce the desired gait. The complete
control chain has been developed using standard freely available C tools.
1 INTRODUCTION
Data flows between sensors and controllers is a cru-
cial point in robotics which is solved by using ter-
rain buses such as the ISA (Gonzalez de Santos
et al., 2005) or the CAN bus (Berns et al., 1999).
But, a general trends nowadays is the development
of open source and free frameworks, which use the
widely spread ethernet support. Several collaborative
projects are still growing, taking advantages of the
TCP/IP or UDP/IP protocols: see for example YARP
(Metta et al., 2006), Player (Gerkey et al., 2001) or
ROS (Quigley et al., 2009).
Following this trend, we propose here a very sim-
ple but efficient control architecture for walking ma-
chines actuated by DC motors. It is based on a clas-
sical master-slaves relationship: the master is a per-
sonal computer responsible for gait generation algo-
rithm and motors position control. The slaves are
PIC-based boards which simultaneously drives three
motors. Moreover, the currents and voltages are mea-
sured and sent back to the master which saves them
as a data logger. An interesting particularity of this
work is that all the exploited devices used are cheap,
and usable with free development tools.
Master and slaves are presented in Section 2. The
data synchronization and some results are provided in
Section 3. Conclusion is given in Section 4.
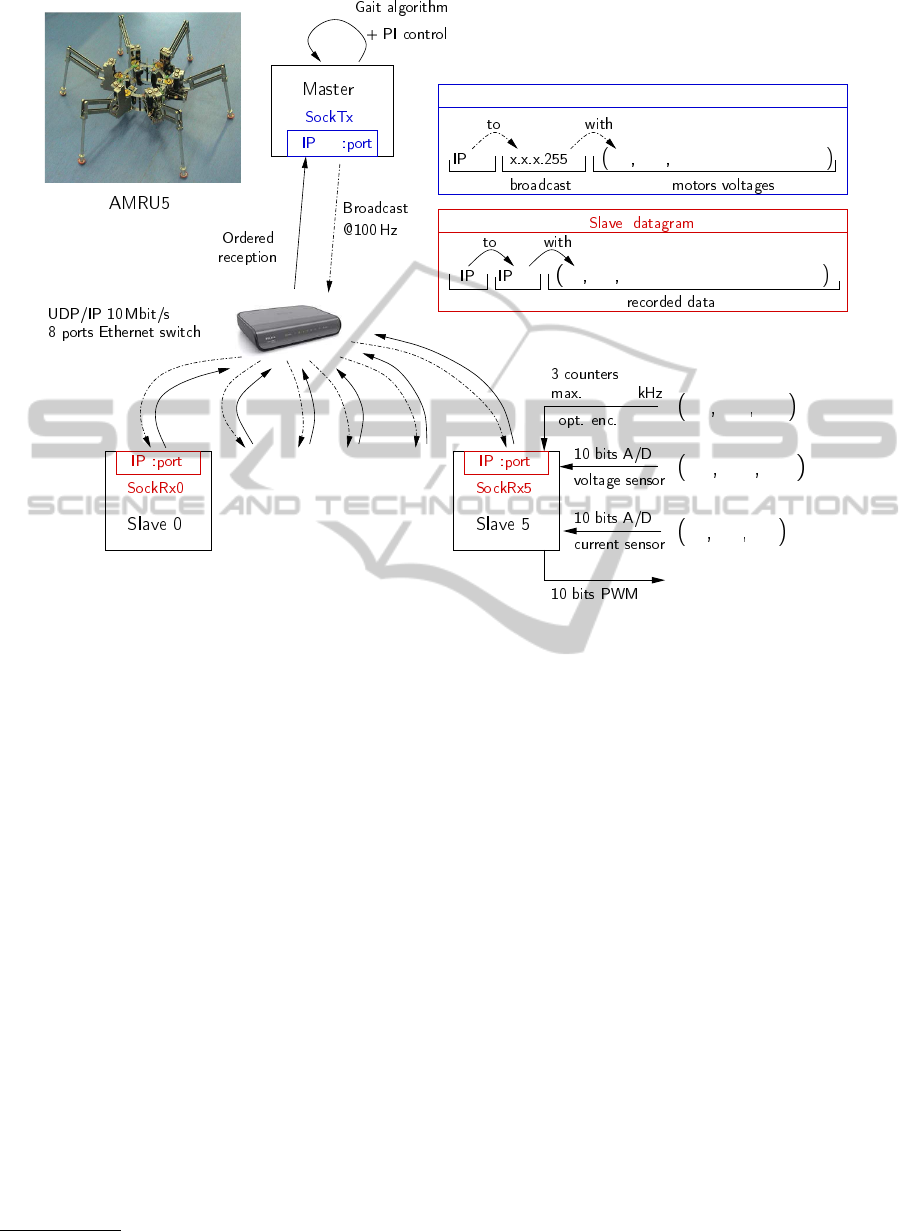
2 MASTER AND SLAVE BOARD
AMRU5 is a six-legged robot with hexagonal config-
uration. It weights about 34kg and its outer diameter
varies from 1.2 to 1.6m. Each leg is actuated by 3 DC
motors equipped with incremental encoders. The dis-
tributed control architecture is highligted in Figure 1.
Each of the six embedded slave boards drives three
joints. Moreover it measures the DC motors supply
voltages, the rotor shafts positions and the motor cur-
rents.
Their synchronization is assumed by the master
PC which computes in real-time the target position
that each foot has to reach to produce the desired gait
(detail about gait generation are out of the scope of
this article). Master and slaves communicate with the
UDP/IP protocol over 10Mbit/s local network.
2.1 The Master
The master is a PC (3GHz, 1.5Go RAM) running
Linux 2.6.31-11 preemptive real-time kernel. The
277
Bombled Q., Verlinden O., Bagein M. and Manneback P..
A SIMPLE AND EFFICIENT CONTROL ARCHITECTURE FOR WALKING ROBOTS - Application to AMRU5.
DOI: 10.5220/0003404802770280
In Proceedings of the 8th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2011), pages 277-280
ISBN: 978-989-8425-75-1
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
Master datagram
q
5
r
q
5
v
q
5
h
i
5
r
i
5
v
i
5
h
u
5
r
u
5
v
u
5
h
u
0
r
u
0
v
u
0
h
, ..., u
5
r
, u
5
v
, u
5
h
q
i
r
q
i
v
q
i
h
, i
i
r
, i
i
v
, i
i
h
, u
i
r
, u
i
v
, u
i
h
mast
mast
mast
... ...
3 × 60
0 5
i
i
Figure 1: Global overview of the control architecture.
control loop is rated at 10ms by means of the C-ANSI
select()
function (details are given in Section 3).
When all the data from slaves are received, the gait
algorithm computes the next 18 joint target positions.
Each of them enters in a Proportional Integral (PI)
control loop, calculating the new reference voltage to
be applied to the corresponding motor.
One specificity of this architecture is that com-
mand is computed on the master, letting flexibility
during the development phase because position con-
trollers are implemented directly on the master in-
stead of re-programming the six slaves. In return
the communication must be very reliable, because the
controllers require the updated position of each joint
for control calculations.
2.2 The Slave
The three DC motors of each leg are commanded
by a SBC65EC from Modtronix
1
. This single board
computer with Ethernet capabilities is based on a
PIC18F6627 running at up to 40MHz. A TCP/IP
open-source stack written for the Microchip C18
LITE compiler is freely delivered by the manufac-
1
http://www.modtronix.com
turer. This stack naturally includes the UDP/IP pro-
tocol, and classical socket definitions similar to the
C-ANSI standard.
Basically, the slave board has four tasks to per-
form within one control time slice: 1) manage local
network communication, 2) collect continuously po-
sitions of the three motor shafts, 3) drive the three
motors by applying the received command, 4) per-
form A/D conversions of three motor currents and the
board voltage supply. The systematic data logging
helps us to validate accurately a dynamic model es-
tablished in (Bombled and Verlinden, 2009). Tasks 1)
and 3) and 4) require less than 1.5ms to be completed.
3 DATA FLOW
3.1 Data Synchronization
The UDP/IP Communication protocol has been cho-
sen to meet real-time requirements. Data integrity
over local network and low latency are reached, de-
spite of the unsecured aspect of UDP, by dedicating
the network to one and only one protocol detailed
hereafter. And, even if risk of data losses exists, the
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
278
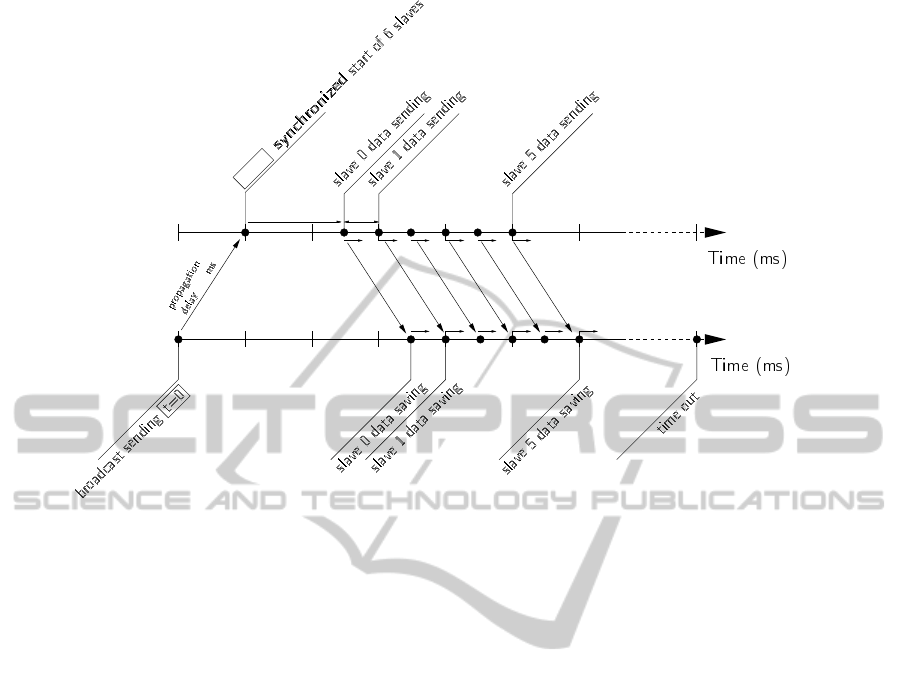
Slaves are working
Master is waiting
Slaves are polling
gait algorithm
...
...
t ≈ 1
∆t
s
∆t
d
≈ 1
t
s0
Figure 2: Communication time diagram.
update of the next control cycle should compensate
the previous losses.
The master imposes the control rhythm by broad-
casting every 10ms a UDP global packet containing
the 18 actuator commands. The broadcast ensures a
simultaneous reception of this packet by all the slaves,
who are ready to listen data on a specified port. Each
slave collects its own three actuator commands from
the broadcasted packet.
The master bases its emission-reception cycles on
the
select()
C standard function. This blocking
function returns in two events: when data are incom-
ing on the socket or when a timeout occurs in the case
of no network activity. The timeout is set to 10ms at
the beginning of the control cycle and is updated each
time data are received on the master port. Each slave
returns data to the master in order, at time t
s0
+ i· ∆t
s
,
where i = 1...6 is the number of the i
th
slave. The
time diagram of the communication process is shown
in Figure 2.
The following pseudo-code describes the master
cycle:
deadline = now() + delay; // delay of 10ms
while(robot_has_to_move())
{
if(slave_cnt == 6)
{ // all slaves data received
targets = compute_motor_command();
slave_cnt = 0;
}
switch(select(socket,deadline-now()))
{
case -1: // network error
return(error);
case 0: // timeout is over
broadcast(targets);
deadline = deadline + delay;
break;
case 1:
data_from_slave[slave_cnt] =
= receive(socket);
slave_cnt = slave_cnt + 1;
break;
}
}
Note that the CPU load of each slave is a func-
tion of pulse frequency from the encoders, which in-
creases with the motor velocity. Consequence is that
the real slave data emission is slightly delayed. This
variation is noted ∆t
d
in Figure 2.
3.2 Results
A tripod gait with a leg cycle period of 15s has been
implemented on AMRU5. Figure 3 is a plot repre-
senting the arrival time on the master, of the data sent
by the six slaves (numbered
0
→
5
), inside the 10ms
of control time slice, for a gait during 30s. Time 0 on
the Y-axis corresponds to the emission of the broad-
cast packet. In this example, t
s0
and ∆t
s
have been
fixed to 1.5 and 0.7ms respectively.
First data incomes at 3.5ms on the master, because
A SIMPLE AND EFFICIENT CONTROL ARCHITECTURE FOR WALKING ROBOTS - Application to AMRU5
279
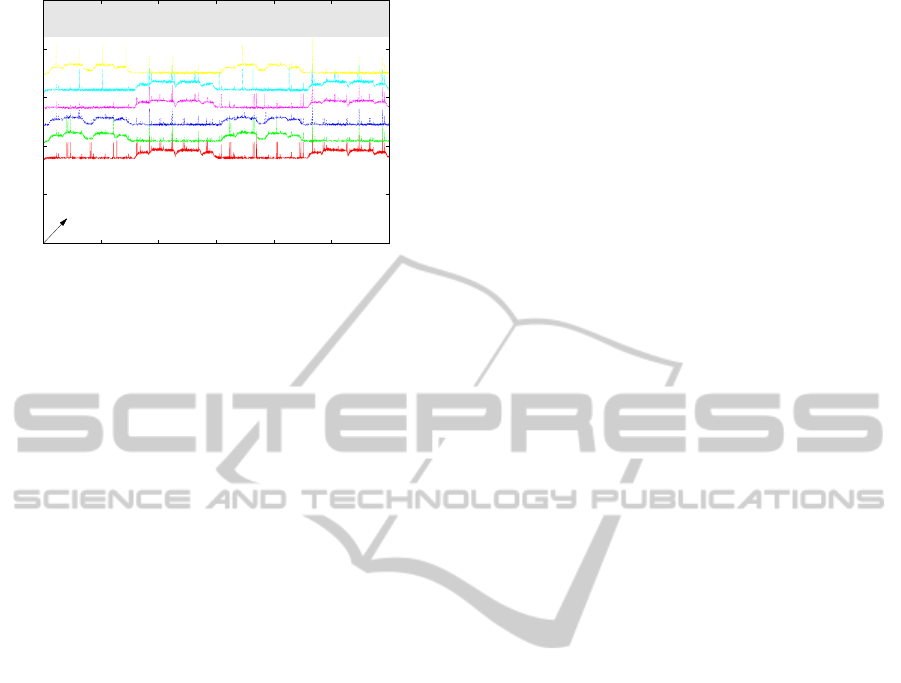
Gait algorithm and PI control
Send broadcast
5
4
3
2
1
0
Time (s)
Reception time from the slaves (ms)
302520151050
10
8
6
4
2
0
Figure 3: Reception times of data coming from slaves.
a propagation delay of 1 ms has been recorded on the
Ethernet network (Figure 2). The network propaga-
tion delay between master and slaves mainly comes
from the switch.
The varying load on the slave CPU is visible on
the receiving times. But in any case, the reception
is well ordered, and the time remaining for the gait
algorithm and control computations is sufficient (8.5
- 10ms).
4 CONCLUSIONS
A distributed control architecture has been developed
for a hexapod robot. The slave element controls a
leg at position level: the PIC-based board allows easy
C programming of the control tasks, and is provided
with an open-source TCP/IP stack compatible with
the C18 Microchip compiler. The master is a PC run-
ning real-time Linux kernel on which an application
has been developed in C-ANSI for leg motion gen-
eration and data synchronization. The resulting con-
trol architecture is very flexible and has several ad-
vantages:
• The slaves have a generic program: they only
drive three motors and collect real-world data.
This avoids several re-programmings during the
development as it had been the case with a po-
sition controller directly implemented on them.
They just have a specific identification number,
which determines their IP address and data they
have to read from the master global packet.
• Any kind of controller and/or gait algorithm could
be implemented on the master, provided that the
computation is fast enough to stay inside the con-
trol time slice. For example, see (Bombled and
Verlinden, 2010) for a ground detection algorithm
from motors currents sensing.
• Communication hardware is made from widely
spread and inexpensive on the shelf materials,
namely: a network switch, an Ethernet adapter,
and microcontroller boards.
ACKNOWLEDGEMENTS
Many thanks to Prof. Y. Baudoin from the Royal Mili-
tary Academy of Belgium for the lending of AMRU5.
Authors are also grateful to the technical staff of the
TMDV Department: R. Berton and K. Nis.
REFERENCES
Berns, K., Ilg, W., Deck, M., Albiez, J., and Dillman, R.
(1999). Mechanical construction and computer ar-
chitecture of the four-legged walking machine bisam.
IEEE/ASME Transactions on Mechatronics, 4(1):32–
38.
Bombled, Q. and Verlinden, O. (2009). Dynamic model,
gait generation and control of the amru5 hexapod
robot. In Mobile Robotics : Solution and Challenges,
pages 513–521, Istanbul, Turkey. CLAWAR 12th In-
ternational Conference.
Bombled, Q. and Verlinden, O. (2010). Current sensing in a
six-legged robot. In IUTAM Symposium on Dynamics
Modeling and Interaction Control in Virtual and Real
Environments, Budapest, Hungary.
Gerkey, B., Vaughan, R., Stoy, K., Howard, A., Sukhatme,
G., and Mataric, M. (2001). Most valuable player:
A robot device server for distributed control. In Pro-
ceedings of the IEEE/RSJ International Conference on
Intelligent Robots and Systems (IROS), pages 1226–
1231, Wailea, Hawaii.
Gonzalez de Santos, P., Garcia, E., Estremera, J., and Ar-
mada, M. (2005). DYLEMA : Using walking robots
for landmine detection and location. International
Journal of Systems Science, 36(9).
Metta, G., Fitzpatrick, L., Natale, P., and Natale, L. (2006).
Yarp: yet another robot platform. International Jour-
nal on Advanced Robotics Systems, 3(1):43–48.
Quigley, M., Gerkey, B., Conley, K., Faust, J., Foote, T.,
Leibs, J., Berger, E., Wheeler, R., and Ng, A. Y.
(2009). Ros: an open-source robot operating system.
In Proc. Open-Source Software workshop of the In-
ternational Conference on Robotics and Automation
(ICRA), Kobe, Japan.
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
280
