
PROBLEM SOLVING FRAMEWORK WITHIN DECISION
SUPPORT SYSTEMS
Yan H. Ng
Singapore Polytechnic, 500 Dover Road, Singapore 139651
Keywords: Problem Solving Cycle, Co-operative Planning, Decision Support Systems.
Abstract: In the study of problems solving, cognitive psychologists had generalized it as a process of applying skills
to overcome obstacles and constraints, so as to move from a given state to the desired goal state. In here, we
look at where a line could be drawn to divide the process of problem solving into two sub-processes; a one-
off, but cognitive demanding task for human to define the problem space, in terms of representation, and a
routine search process, that could be undertaken by a machine, to search and select a solution within a
defined solution space, so that to oversee its execution from start to finish to realize the goal.
1 INTRODUCTION
However smart a person might think of himself,
cognitive psychologists, Bransford and alike,
(Bransford & Stein, 1993), had shown that in the
event of problem solving, we still walk through the
process as follows:
1. Problem identification
2. Definition of problem
3. Constructing a strategic for problem solving
4. Organizing information about a problem
5. Allocation of resources
6. Monitoring problem solving
7. Evaluating problem solving
Although many people may not be aware of the
process, and might even miss out on some of these
stages unknowingly, especially the first two stages,
the reality would eventually bring them to
understand that the efforts and resources directed at
a misguided target is unlikely to bring the results as
expected.
Reflecting on the two decision support system
projects currently underway; namely “Hospital Bed
Management System”, and “C
3
I System for Bus
Lane Management”, we have observed that if the
system developer could identify and define the
problem in terms of some forms of representation, a
decision support system could be put in place to
search for a solution within the defined solution
space, then the human and machine could have
completed the problem solving cycle together to
realize the goal, collectively.
2 WHAT IS A PROBLEM?
Medin and Ross (1997) considered a problem to
have four aspects; goal, givens, means of
transforming conditions, and obstacles.
The goal is some state of knowledge toward
which the problem solving is directed and for which
at least some criterion can be applied to assess
whether the problem has been solved. The givens
include the objects, conditions, and constraints that
are provided with the problem, either explicitly or
implicitly. Problems need to have some means of
transforming conditions, of changing the initial
state to the goal state. Finally, problems usually
associated with some obstacles.
In here, Medin and Ross described problem
solving as a process
a) Starting from an initial state
b) Trying to arrive at the goal state
c) Solution is a path connecting the initial state
to the goal state; along the way, using
whatever mans and resources provided to
transform conditions, and overcoming
obstacles.
Medin and Ross also further divided the types of
problems into Well-defined problems, and Ill-
defined problems; the former as having completely
140
H. Ng Y..
PROBLEM SOLVING FRAMEWORK WITHIN DECISION SUPPORT SYSTEMS.
DOI: 10.5220/0003434301400146
In Proceedings of the 13th International Conference on Enterprise Information Systems (ICEIS-2011), pages 140-146
ISBN: 978-989-8425-54-6
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
specified initial conditions, goals and means of
transforming conditions, while the latter have some
aspects of the problem not completely specified.
Nevertheless, H. A. Simon (1973) has argued that a
crucial part of problem solving is changing an ill-
defined problem into a well-defined problem (or
often, a number of well defined problems).
3 PROBLEM-SOLVING CYCLE
Bransford, and Sternberg (1996) consolidated the
problem solving sequence into a seven step cycle as
stated in the Introduction Section; in which problem
was identified and defined in Step 1 and 2, to
provide the initial state and goal state for the
generation of a path in Step 3, 4 and 5. However, in
a dynamic environment, when all objects are
constantly evolving, the chosen solution is unlike to
run smoothly from start to finish without a hitch,
some form of modifications would likely to take
place so as to steer the course. Therefore, a problem
solver should monitor and guide the solution
towards the goal state, modify and repair it along the
way. Finally, once arrived at the goal state, the
problem solver should evaluate the results, and
hopefully learn from the experience.
4 FRAMEWORK FOR PROBLEM
SOLVING
By studying the process of problem solving by
human; we examine the limitation of problem
solving by machine, with the purpose of introducing
machine intelligence into the process of problem
solving.
Firstly, problem identification and definition are
the two very demanding cognitive tasks that should
be left with human being in the problem solving
cycle, so that the problem solver could study the
problem, focus on the problem, and define it in
terms of goal, and objectives that it could be
decomposed into.
Secondly, although monitoring problem solving
in a dynamic environment is another demanding
task, it is possible to develop a system framework
for a machine to undertake this task to select a
suitable strategic formations and tactical plans from
a set of plans well defined plans kept inside the
solution space, so as to steer the operational plan
from start to finish.
Thirdly, if the construction of strategic
formation could be combined with its tactical
realization, and package together as one co-operative
plan, then selection of the best possible plan could
be based on not only the quality of strategic
formation, but also the cost of realization as the
criteria for plan selection.
Based on Sternberg (1996) 7 steps sequence, we
put forward a problem solving framework that
consolidated the problem solving cycle into a 4
stages operational procedure:
1. Deliberation;
2. Planning;
3. Plan Selection; and
4. Plan Realization.
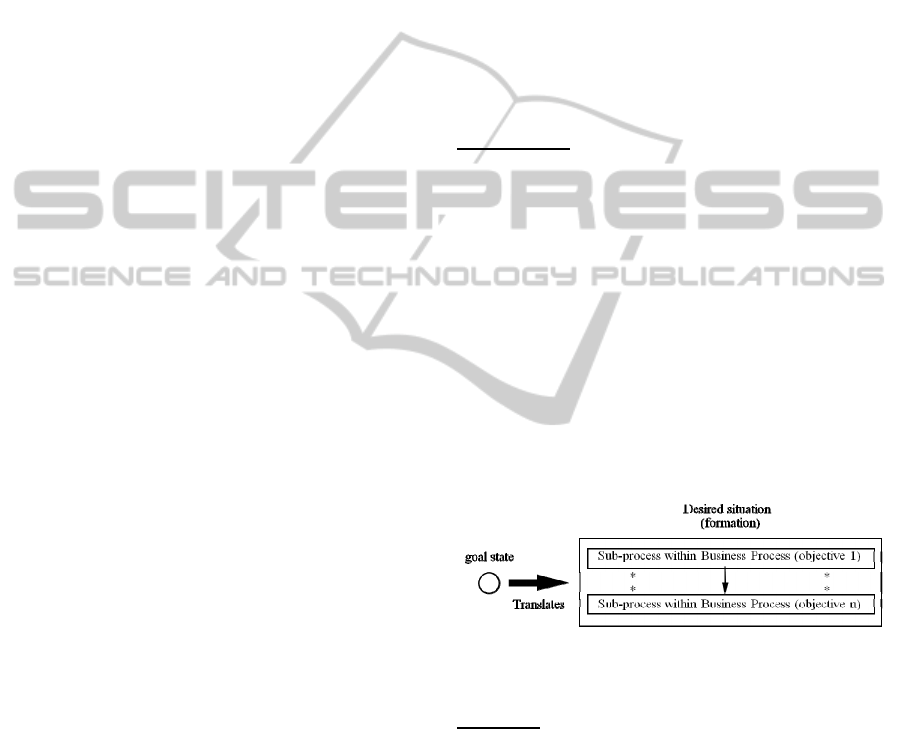
Deliberation:
At the Deliberation stage,
• The system architect studies the current
situation and identifies the desired situation
by analyzing the situation map.
• The system architect performs mapping on
the desired situation (qualitative goal) into
a list of achievable (quantitative)
objectives, which must be accomplished in
order to realize the goal.
• The system architect evaluates the current
situation and its feasibility in reaching all
the intermediate states required in the
desired formation either by case-based
reasoning or planning.
Figure 1: The process of translating goal into a strategic
formation.
Planning:
During the Planning stage, the task is to develop
strategic formations that connect all objectives
identified together, as well as looking into the details
of each objective to study the feasibility of their
realization.
The main task for planning is to produce at least one
fully connected solution paths in the form of a two
stage co-operative plan
• Strategic Planning establishes the
operational flows of the entire business
process.
• Tactical planning to work out the physical
PROBLEM SOLVING FRAMEWORK WITHIN DECISION SUPPORT SYSTEMS
141
paths between states
• The distinction between strategic and
tactical planning is essential here, as the
former provides the overview of the plan
from start to finish, while the latter would
only generate paths between two states.
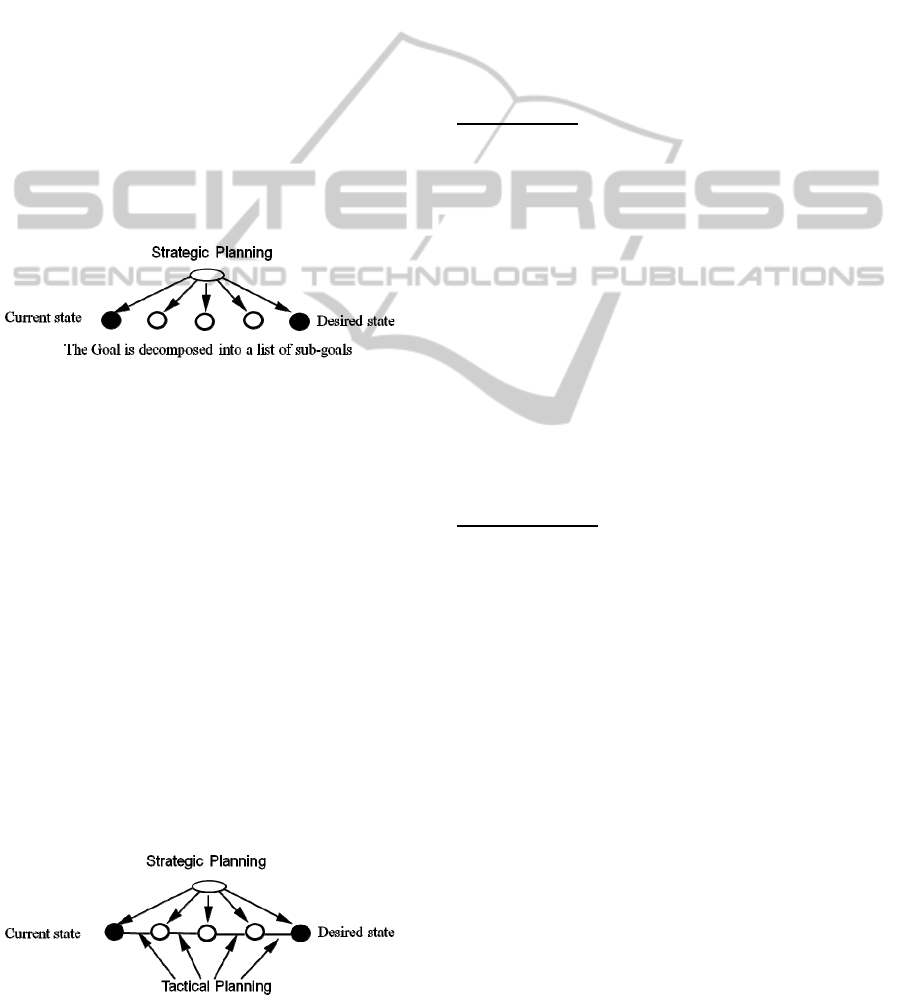
• Strategic Planning provides the formation
based on the list of intermediate states, or
achievable objectives (partial plan),
sandwich between the initial and goal
states.
• The eventual outcome of a strategic plan
should be at least one operational plan that
flows from the initial state to the desired
goal state, stating the constraints and
preconditions in each state, as well as the
interlocking relationship between states
(objectives), but without physical paths
joining states together. As shown in Figure
4 below.
Figure 2: Strategic Planning is a process of decomposition.
• Tactical Planning is responsible for
generating detailed paths to achieve the
objectives in the formations.
• its approaches the problem from the lowest
level of abstraction, formulating solution in
the form of course of actions to move from
one state to another, often without an
overall picture (strategy) that includes the
initial and desired goal states.
• It decision is based on short-term
consideration to connect the two
neighboring states under the guidance of
some heuristics.
The framework for Co-operative Planning
brings together the overview of the strategic
formation (strategic planning), as well as the detail
course-of-action for the realization of each objective.
As shown in Figure 3.
Figure 3: Framework for Co-operative Planning.
This two level Co-operative Planning process
enhances the chances of the solution (work
procedure) survive in a dynamic environment during
plan realization.
• By focusing initially on strategic issue as a list
of objectives, which have only pre- and post-
condition, but without rigid physical paths
between states. This enable changes in the
strategic formation by simply adding and
deleting objectives, without constraint of
physical connection.
• Nevertheless, the plan will become rigid and
inflexible once the paths between intermediate
states have been at the tactically planning stage.
Plan Selection
The third stage is a decision-making procedure to
select an operational plan, where all proposed
solutions are compared based on some forms of
selection mechanisms to resolve conflict among
different plans.
• Each strategic plan once being merged and
consolidated into a workable solution
(workflow), its quality can be measured in terms
of
– cost, and
– uncertainty,
• The most preferential solution path would be
given priority as the operational plan, with other
workable solutions being labeled as stand-by
plans.
Plan Realization
At the final stage of the operational procedure, an
operational manager will be put in place within the
decision support system (DSS) to check and assess
the progress of each process to ensure that the pre-
programmed work procedure (workflow) remains
relevant and cost-effective in the light of changes in
the environment. With the framework of Co-
operative planning, the Operational Manager could
modify and repair at either the strategic or tactical
level.
The roles of the DSS Operational Manager is
• to coordinate all required resources to achieve
the ultimate goal.
• to repair the paths between intermediate states,
or perform local re-planning, when the survival
of operational plan is threaten
• to trigger stand-by plans, when operational plan
becomes impossible
ICEIS 2011 - 13th International Conference on Enterprise Information Systems
142

5 HOSPITAL BEDS
MANAGEMENT SYSTEM
In a modern hospital, the management of hospital
beds is an essential part of the in-patient workflow
system, as it indicates not only the flows of in-
coming patients into the wards, but also the
resources and manpower required to support these
patients using the beds. Therefore, the pattern of
hospital bed usage is often used as a proxy to
measure the number of patients treated in the
hospital.
Deliberation:
Problem identification:
There is no central control to overseeing the release
of beds for the admission of new patients.
Definition of problem:
Although a bed management system is installed at
Khoo Teck Puat Hospital (KTPH), it is only a
situation map to display the status of hospital beds
usage in terms of R (Ready to use), or P (Prepare for
discharge), but does not monitor the transition from
“P” to “R”. Hence, we define the goal as follows:
Goal: To monitor the realization and execution of
the operational plan to transform from “P” to
“R”.
Objectives: Discharge (A, F, T, L) Æ C.
The goal could be decomposed into a list of
objectives shown above. Patient discharges are often
decided upon during the physician visit to the ward
every morning. A list of activities followed
thereafter must be completed before patients leave
hospital; scheduling appointment (A), collecting
prescriptions (F), arranging family member to take
them home (T), collecting letter from the doctor who
decide to discharge them (L). These activities are not
sequential, and therefore could be executed in
parallel. Once the bed is freed, the bed should be
cleaned (C) before the status changes from “P” to
“R”. In theory, cleaning process could take place in
parallel with Discharge (A, F, T, L) provided the
discharged patient could be moved off the bed into a
discharge lounge, where patients could rest and wait
in the lounge for the completion of “A”, “F”, “T”
and “L”.
Planning:
Show in the situation map, the existing bed
management system indicates the number of “P” and
the number of “R” on the screen, to indicate the
status of patient admission into the wards. The
execution of the course of actions for Discharge (A,
F, T, L) are undertaken outside the system, only
when “P” is transformed into “R” status would the
status be displayed onto the system.
To speed up the transformation from “P” to “R”,
tactical planning for “A”, “F”, “T” and “L” will be
formulated as part of the co-cooperative plan.
Co-operative plan 1
Strategic Plan 1: Discharge (D Lounge) Æ C Æ R
Tactical Pan 1: If patient is well enough to be send
home, discharge to the Discharge
Lounge, would enable the bed to be
cleaned, and proceed to turning the
status of bed from “P” to “R”.
Co-operative plan 2
Strategic Plan 2: Discharge (A, F, T, L) Æ C Æ R
Tactical Plan 2: However, if the patient is not well
enough to be moved off the bed, the
completion of “A”, “F”, “T”, and
“L” will be the precondition to
proceed to cleaning the bed “C”.
This will become the task for DSS
operational manage to monitor and
execution during the plan
realization stage.
Co-operative plan 1 and Co-operation plan 2 are the
alternative realization for the same goal to transform
from “P” to “R”.
Plan Selection:
Different sets of Co-operative plan will be studied
and compared for the selection of the best plan as
the operational plans, leaving the rest of the plans as
stand-by plans.
Plan Realization:
One of the strength of Co-operative planning is in its
ability to repair or change plan during execution in
respond to changes in environment; either
strategically, or tactically. For instance, if status “F”
have not completed within a predetermined time,
alert will be sent to pharmacy to look into the matter.
Same is applicable to “L” status, if letter from doctor
is unable to be completed in time, then alternatively
solution such as sending it by email, or post, could
be activated. The role of DSS operational manager is
to study and monitor to ensure the operational plan
is successfully executed.
In summary, the operational procedure of the KTPH
bed management system consists of 4 stages:
1. Deliberation:
A Dashboard or Situation Map will
consolidate information about bed status to
be displayed onto the nurse station in the
wards, and the A&E department.
PROBLEM SOLVING FRAMEWORK WITHIN DECISION SUPPORT SYSTEMS
143

2. Planning:
A number of Co-operative plans would be
studied and put forward for consideration
3. Plan Selection:
Assume that Co-operative Plan 1 had been
selected as operational plan. Co-operative
Plan 2 will become the stand-by plan.
4. Plan Realization:
In the event of operational plan become
impossible to move patient into the
Discharge Lounge, the DSS operational
manager could switch over to one of the
stand-by plan, such as Co-operative Plan 2
to complete the Discharge (A, F, T, L)
before cleaning the bed.
In reflection, we consider the hospital beds
management system as a well-defined problem with
very little uncertainty, therefore, we could walked
through the process of problem solving cycle, by
dedicating the first two stages to the system
architect, and leaving the plan selection and
realization phases to the decision support system to
take care of.
1. Deliberation; untaken by system architect
2. Planning: untaken by system architect
3. Plan Selection: untaken by the system
4. Plan Realization: untaken by the system
In here, only case-based reasoning approach is
required to search through the solution space stored
in the case-based library for managing the bed usage
in the hospital.
There is no need to deploy planning approach to
construct solutions backward from the goal state, or
forward from the current state. Nevertheless, in
order to demonstrate the potential of our problem
solving framework, we have included a different set
of Co-operative plan in the event of national
emergency when the hospital was overwhelmed by
hundred of patients coming through the A&E
department.
Deliberation:
Problem identification:
There is no central control to overseeing the release
of beds for the admission of new patients.
Definition of problem:
In order to increase the number of patients admitted,
we now defined the problem by means of beds
available within the whole KTPH, and not by
number of beds inside the wards. In other words,
beds could be placed anywhere along the hospital
corridors, so that to increase the intake of patients.
The Goal: to search for spaces to accommodate the
extra beds outside the wards.
Objectives: to pack maximum number of beds in the
designated areas (DA).
Planning:
Assuming the hospital has sufficient space to
accommodate all the extra beds needed to cope with
the situation. One of the strategic plans could be
Co-operative plan N
Strategic Plan n:
Extra capacity = DA
1
+ DA
2
+ …… DA
n
Tactical Pan m:
Searching extra beds for DA
1
; +
::::::::::::::::::::::::::::::::::::::::::::::
Searching extra beds for DA
n
Logistically, in order to realize the tracking of
moving objects (beds) moving around the hospital,
each bed would be fitted with a wireless tag, so that
its movement could be tracked and status displayed
on the dashboard or situation map.
6 BUS LANE MANAGEMENT
SYSTEMS
The bus lane scheme in Singapore was launched in
1974, to give buses priority to travel along special
destined bus lane on the roads, so that to enter and
exit bus stops without the obstruction.
Subsequently, the Land Transport Authority
(LTA) of Singapore launched a full-day bus lane
scheme in 2005 along Orchard Road to improve bus
travelling speeds, with the purpose of encouraging
shoppers to use public transport, rather than taking
onto their cars. In December 2008, it was Estimated
that there were a total of 23km of full-day bus lanes
and 155km of normal bus lanes in Singapore.
This project is funded by the National Research
Foundation of Singapore.
Deliberation:
Problem identification:
Vehicles other than buses are obstructing buses
travelling on the roads.
Definition of problem:
To detect and identify the vehicle intruding into the
designated bus lanes; and record down the evidence
of violation legally admissible in court.
The Goal: to detect and identify the vehicle
intruding into designated bus lanes.
ICEIS 2011 - 13th International Conference on Enterprise Information Systems
144

Objectives: Obj1 is to detect the vehicle into the bus
lanes; (Using scanners and overview
camera)
Obj2 is to identify the type of vehicle,
and its number plate; (Using a front and
a rear camera)
Obj3 is to record down the sequence of
violation with time stamp, which could
be legally admissible in court. (Using an
overview camera)
Obj4 is to transmit the data to the
backend system (LTA office) by means
of wireless technology.
Planning:
One of the strategic plans could be
Strategic Plan 1: Obj1 + Obj2 + Obj3 + Obj4
Tactical Pan for Obj1 Detect vehicle into bus lane
within the 50m range before
the bus stop, trigger the
activation of the front and
rear cameras, plus nIR
lighting if needed.
Tactical Pan for Obj2: capture and read the vehicle
licence plates (including
front and rear views) and
vehicle classification.
Tactical Pan for Obj3: record sequence of vehicle(s)
violation footage inside the
bus lanes.
Tactical Pan for Obj4: processed all the information
required on-site, before
transmitting them to the back
office by wireless.
Plan Selection:
There will be different sets of strategic plan for
different scenarios; in a normal scenario, the vehicle
licence plates are clearly recognisable, but in other
situations where vehicle licence plates could not be
positively identified. In such cases, a different Co-
operative plan might have to be activated to identify
the vehicle involved, such as checking inside the
database for profile of the vehicles resemble the one
in question that might have been captured by the
system earlier. In this case, features of this vehicle in
question, other than licence plates could be used to
help to identify the vehicle. Based on the assumption
that people always making the same journey when
travelling from one place to the other.
Different tactical plans are also kept n place to
support classification of vehicle, by means of colour
detection, license plate colour detection, type of
vehicles.
Plan Realization:
In order to cope with every kind of situations on the
roads, the role of the DSS operational manager is to
steer the operation to achieve the objectives set out
in the strategic plan, and realize the goal by detect,
identify, capture, and transmit the violation of bus
land back to the back office.
In comparison with the hospital bed management
system, the bus lane management system is also a
well-defined problem with changes in environment,
and quality of pattern recognition on the licence
plates being the uncertainty, we, therefore, also
dedicated the first two stages to the system architect,
and the plan selection and realization tasks to the
DSS operational manager.
1. Deliberation; untaken by system architect
2. Planning: untaken by system architect
3. Plan Selection: untaken by the system
4. Plan Realization: untaken by the system
Once identified, and defined, all possible scenarios
are studied to develop solutions to cope with the
situations, with representation of each solution kept
inside the case-based library, so that, DSS
operational manager could select, and activate the
operational plan to detect and identify the vehicle
intruding into designated bus lanes. If successful,
LTA of Singapore will consider doing away with
civil contractors to police bus lane to enforce
violation.
7 CONCLUSIONS
The framework for problem solving put forward in
this paper has been applied to the two DSS projects
presented above with encouraging results; the two
level co-operative planning has provided the
flexibility for the decision support system to repair
and modify the operational plan during execution,
supported with stand-by plans available in the
solution space.
The difficulty with searching for problem space
is that the number of possibility is often too large to
try them all. The problem solving framework we
proposed here, provides a sound partition of work
between the system developer, and the DSS
operational manager to enable them to complete the
problem solving cycle co-operatively and
collectively; each focus on what they do best; human
developers take on the most cognitive demanding
task in deliberation and planning so as to define a
solution space, focus on only a limited sets of
solutions for the machine to select, while the DSS
PROBLEM SOLVING FRAMEWORK WITHIN DECISION SUPPORT SYSTEMS
145

operational manager would perform the routine tasks
of plan selection and execution; selecting the most
appropriate plan as operational plan, and steer it to
achieve the objective, and realize the goal. Hence,
the framework for problem solving we put forward
here reinforces Newell and Simon’s view that
problem solving as representation and search. The
steps for deliberation and planning focus on issues
of identifying problem, defining problem into a set
of representations that is sufficient to cover the
problem space, yet small enough for machine to
search for solution, and realize it. (Newell & Simon,
1972)
Representation:
1. Deliberation; untaken by system architect
2. Planning: untaken by system architect
Search:
3. Plan Selection: untaken by the system
4. Plan Realization: untaken by the system
In conclusion, the two decision support systems
undertaken are domain dependent and well defined,
with only a limited set of scenarios to cover.
Therefore, at this moment in time, we could idealize
the solution space as a closed solution space with a
set of well defined solutions of problem stored in the
knowledge base. However, as H. A. Simon (1973)
put it “a crucial part of problem solving is changing
an ill-defined problem into a well-defined problem
(or often, a number of well defined problems).”
Given time, when we are able to build or granted
access to sufficient number of well-defined
problems, we would be in the position to develop
methodology to solve ill-defined problems.
The development of Evidence-based medicine
(EBM) is one step along this direction.
“The conscious, explicit and judicious use of the
best current evidence in making decisions
about the individual patients.”
(Sackett et al., 1996)
The so called best current evidences are patient
case notes of certain disease kept in the databases of
some EBM centres. One day, in a not too distance
future, we, as doctors, could use a list of symptoms
associated with a particular disease as search keys to
locate a summary of these patient case note stored in
databases around the world, to help us in our
diagnosis for some unknown or ill-defined disease.
With the connectivity of internet today, it should not
be too far in the future to realize this dream.
ACKNOWLEDGEMENTS
We would like to thank the support of National
Research Foundation of Singapore for funding the
“C
3
I System for Bus Lane Management”, project,
SciMed (Asia) Pte Ltd, Khoo Teck Puat Hospital
and Singapore Polytechnic for funding the “Hospital
Bed Management System” project.
REFERENCES
Bransford, J. D., & Stein, B. S. (1993). The IDEAL
problem solver: A guide for impoving thinking,
learning and creativity (2nd ed.). New York: W. H.
Freeman.
Medin, D. L., Ross B. H., 1997. Cognitive Psychology,
Harcourt Brage College Publishers. United States of
America
Newell, A., & Simon, H. A. 1973. Human problem
solving. Englewood Cliffs, NJ: Prentice.
Sackett, D., Rosenberg, W., Muir Gray, J., Haynes, R.
Richardson, W. (1996). Evidence based medicine:
what it is and what it isn't. British Medical Journal,
312, 71-72. http://cebm.jr2.ox.ac.uk/ebmisisnt.html.
Simon, H. A. 1973. The structure if ill-structured
problems. Artificial Intelligence, 4, 181-201.
Sternberg, R., 1996. Cognitive Psychology Second
Edition, Harcourt Brage College Publishers. United
States of America.
ICEIS 2011 - 13th International Conference on Enterprise Information Systems
146
