
MODELING AWARENESS OF AGENTS USING POLICIES
Amir Talaei-Khoei, Pradeep Ray, Nandan Parameswaran
Asia-Pacific Ubiquitous Healthcare Research Centre, University of New South Wales, Sydney, Australia
Ghassan Beydoun
School of Information Systems and Technology, University of Wollongong, Wollongong, Australia
Keywords: Awareness, Policy, Intelligent Agent, Disasters.
Abstract: In addition to cooperation, research in disaster management exposes the need for policy awareness to
recognize relevant information in enhancing cooperation. Intelligent software agents have previously been
employed for problem solving in disaster situations but without incorporating how the agents can create or
model awareness. This paper presents an awareness based modelling method, called MAAP, to maintain
awareness of software agents of a given set of policies. The paper presents preliminary results indicating
that the use of policies as a source of awareness, as facilitated by MAAP, is a potentially effective method to
enhance cooperation.
1 INTRODUCTION
AND RELATED WORK
Disaster management may involve unknown
information which may result in inadequate
cooperation between agents involved. Given that
many integrated standards in distributed and
autonomous networks e.g. (Zimmerman 1980;
Udupa 1999; Beydoun et al 2009a; Tran et al 2006;
Beydoun et al 2009b) assume cooperation is already
sufficient, we really need to be able to measure
cooperation (Ray et al 2005). Towards this, we
apply the concept of awareness from Computer
Supported Cooperative Work (CSCW) (Daneshgar
et al 2000; Sadrei et al 2007) and propose using
policies as a way to recognize awareness. The
classical approach in modelling semantics of agents
mental attitudes (agents knowledge and states) is
possible-worlds model e.g. (Rao et al 1991). This
model provides an intuitive semantics for mental
attitudes but it also commits us to logical
omniscience and perfect reasoning. The assumptions
(Sillari 2008) here are (1) the agent is omniscient
e.g. it knows all the valid formulas. For example,
while there was damage in TPS on left wing of the
shuttle, NASA did not know that, because they did
not take the left wing as relevant and they took the
foam strike on the wing as a "turnaround"
maintenance issue. (2) the agent is a perfect reasoner
i.e. it knows all the consequences of its knowledge.
This clearly an idealization, people just know the
relevant truth and the consequences. For example,
NASA policy guidelines provided for operating
spacewalk rescue procedures, but NASA
management team did not take it relevant. Again,
they assumed that the outcome of their reasoning is
perfect. Four different categories of approaches to
address the problem of logical omniscience and
perfect reasoning are (Halpern et al 2010):
Algorithmic Approach, Syntactic Approach,
Impossible-worlds Approach, and Awareness
Approach. In our problem, there is a pragmatic
interpretation for awareness, which motivates us to
use awareness approach and in particular Logic of
General Awareness (LGA) (Fagin 1988)
underpinned by the idea relevance of knowledge.
Under the possible-worlds interpretation, a valid
sentence and its consequences are true in every
world that the agent considers possible. The known
sentence and its known consequences may or may
not be relevant. LGA defines awareness of a formula
as relevance of that formula to the situation. This
definition is particularly applicable for cooperation
enhancement process. Definition awareness, they
differ explicit and implicit knowledge in a way that
an agent explicitly knows a formula when it
implicitly knows that and also it is aware of that.
353
Talaei-Khoei A., Ray P., Parameswaran N. and Beydoun G..
MODELING AWARENESS OF AGENTS USING POLICIES.
DOI: 10.5220/0003436403530358
In Proceedings of the 6th International Conference on Software and Database Technologies (ICSOFT-2011), pages 353-358
ISBN: 978-989-8425-77-5
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
Much research proposes that policies can be used
to implement the awareness in design phase of
developing distributed cooperative applications. The
use of given policies as guidelines to which
information should be aware has not been addressed.
Directory Enabled Networks (DEN) is the main
policy structure used today (Sloman 1994). We
borrow our policy structure from DEN-ng. In DEN-
ng the main idea is that the given set of policy rules
should be loaded based on current knowledge and an
event. In this model, a policy consists of different
policy rules while each rule defines the “event-
condition-action” semantics in DEN-ng. Theses
semantics are such that the rule is evaluated when an
event occurs. When the condition clause satisfies
then the action clause will be executed. Given
modality for performing the action, Sloman (Sloman
1994) elaborates two types of policy rules: (1)
authentication policy rules that permit (positive
authentication) or forbid (negative authentication) to
perform the defined action. (2) obligation policy
rules that require (positive obligation) or deter
(negative obligation) to perform the defined action.
2 AWARNESS ENHANCED
AGENT MODEL
Talaei-Khoei et al (Talaei-Khoei 2011) employ
intelligent agents for human roles to assist them
being aware of relevant information in the situation.
They propose use of policies as an alternative way to
compute required awareness of these agents in
disasters. They do not address how actually agents
can create their awareness based on given policies,
which involves technical implementation aspects.
Proposing a four-step process for cooperation
enhancement, Ray et al (Ray et al 2005) annotate
awareness as an understanding of relevant
information that is required for an individual to
cooperate. Modelling Awareness of Agents using
Policies (MAAP) in this paper proposes a modelling
method based on Logic of General Awareness
(Fagin 1988) to use policies as an alternative source
of awareness. MAAP is intended to be an extension
to LGA to use policy rules, DEN-ng, as an
alternative source to create awareness.
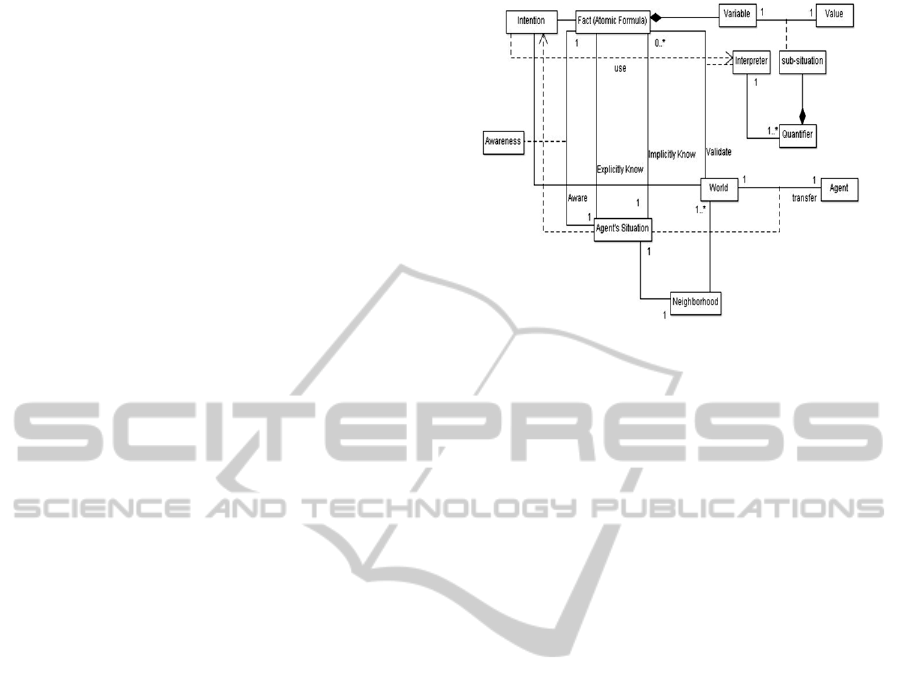
In the possible-worlds conceptualisation of agent
mental states, an agent builds different models of the
world using some suitable language. To enact agent
awareness, a metamodel of possible-worlds based on
LGA describes the awareness of an agent. It consists
of a non-empty set of variables in each world, where
a variable can be differently instantiated using a
Figure 1: Possible-worlds.
domain function describing sub-situations from the
possible worlds. The truth for a fact describing a
given situation, presented by an atomic formula, is
computed by a knowledge interpreter. Each formula
has a list of variables. In each world and for each
formula, the interpreter defines a set of tuples of
values for variables in a formula. When, in a certain
world, the atomic formula is computed as true or
false in that world (see (Kinny et al 1996)). We use
NetLogo agent implementation platform, which
provides a knowledge interpreter according to the
Logic of General Awareness. This provides a table
that stores all the formulas that are true in a world
for a certain list of variables i.e. quantifiers. The
table has key with world and the name of the
formula and it stores the list of quantifiers. Each
world can also validate a formula or a fact. A
formula is valid in a given world, if the quantifier
list can be found in the interpreter.
Worlds in our model are connected by actions.
As advised in (Rao et al 1995), a world has a single
past and multiple tree-like futures, called branching-
time model. If a world describes the state of affairs
in the next time instant, then, we assume that, there
exists an action that transfers the state of the system
from the current world to the next one. We define a
path to be a sequence of worlds. As such, the set of
all paths is a reflexive transitive closure of the set of
actions. We add the unary modal operators “next”
and “eventually” where “next” of a fact is true if the
fact is true at the next time instant, and “eventually”
of the fact is true if the fact eventually becomes true.
Since we do not know the future in advance, there
can be more than one path for a an eventual fact. To
support this, we define two more operators to
represent the modality of a formula describing a
statement about the world: inevitable and optional.
An inevitable formula at a particular point in a time-
tree is true if the formula is true of all paths starting
ICSOFT 2011 - 6th International Conference on Software and Data Technologies
354
from that point. An optional formula at a particular
point in a time-tree is true if it is true of at least in
one path starting from that point. We define Done
Action to be an action that was just performed to
transfer the agent from a past world to the current
world. We also add a method, Done, that returns true
if the agent has just performed that action.
Events can affect the behavior of agents. We
define event as an entity that is sensed by an agent.
When an agent receives an event, it logs that event
in the Received Events list of the world. We
implement Received Events as a table that has keys
with agent and world. The value of each key shows
the name of the event. Therefore, each item in this
table presents events that the agent at a world has
received. In order to implement the Received
operator, that is RE, it returns true for an event e if
there existed any world in the past that the received
event table has the event e.
Figure 2: Branching-Time Model.
Policies are viewed as constraints between worlds.
Consequently, policy rules may also be viewed as
rule-type facts that can be true in a world. Since only
Forbidding and Requiring policy rules are in force,
permitting and deterring do not change the
behaviour of an agent directly. Following the
structure of policy rules in DEN-ng, each policy rule
has an event, a condition and the modalities of an
action. The implementation of policy rules is based
on a table structure. Each item of the table shows a
policy rule which is associated with a world and a
formula describing a world state. The item besides
its key consists of a condition, an event, an action
and the modality of the action (i.e. "forbidding",
"requiring", "deterring" and "permitting").
3 ENACTING POLICY-BASED
AWARENESS OF AGENTS
A policy-aware agent is capable of executing the
following three steps: (1) recognize relevant policy
rules; (2) recognize information required to follow
the relevant policy rules; (3) enact the policy
through changing the behaviour of an agent based on
the recognized relevant information. The first two
steps implement the association of awareness to an
agent’s situation and relevant knowledge. Step 3
implements the effect of awareness on its behaviour.
Figure 3: Awareness Association Components in MAAP.
Policy rules define an association between
formulas and worlds. Agents may implicitly know a
formula of a policy rule; however they may not
consider the policies as relevant to the current
situation in their worlds. (In the following,
occasionally when no ambiguity arises, we drop the
term “formula” in the phrase “formula of a policy
rule” and interchangeably call it “a policy rule” or
even “a policy”). A policy-aware agent may create
its awareness to a policy rule formula when there is
a possibility to break policy rules. Essentially, policy
rules can function as constraints on what the agent
knows and what the agent considers as relevant
information. When the agent is not going to break a
policy rule, there is no point in becoming aware of
the policy, and agent can simply follow its normal
behaviors. Based on the logic of general awareness,
an agent implicitly knows the consequences of its
implicit knowledge. Therefore, if an agent implicitly
knows a policy rule formula and also implicitly
MODELING AWARENESS OF AGENTS USING POLICIES
355

knows that the policy conditions are satisfied while
an event is already received, it creates its implicit
knowledge of associated consequences of a policy
rule. Depending on whether the policy rule is a
forbidding or requiring rule, the agent will implicitly
know that in the next time instance (that is, the next
possible world) the action has been or has not been
done, respectively. Taking this point into account, if
the agent optionally now or in future satisfies the
following three conditions, then it is said to be aware
of the policy rule: (1) The agent has an implicit
knowledge of the policy rule formula. (2) The agent
implicitly knows that the condition of the policy rule
is satisfied and it has received the event associated
with the policy rule. (3) In the next time instant, the
agent has done the forbidden action it has not done
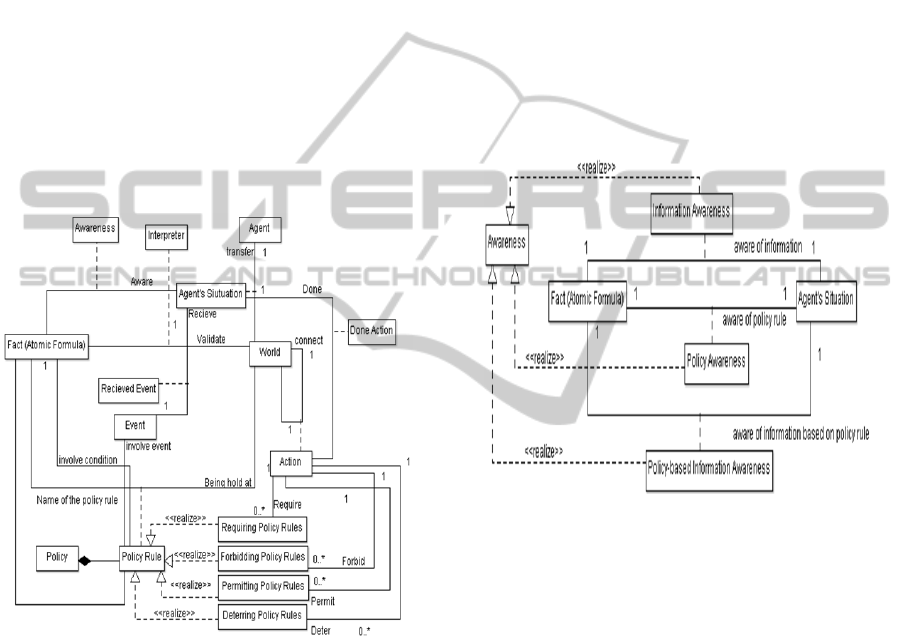
the required action. In MAAP, the awareness
association between agent’s situation and a fact has
three different components, which realize awareness
as shown in Figure 3. Based on Logic of General
Awareness, being aware of a fact implies that the
agent is aware of a sub-fact. Therefore, by being
aware of a policy rule formula, the agent is also
aware of the condition of the policy rule as well as
the fact that the involved event in the policy rule is
received. In fact, regardless of the truth or falsehood
of these two pieces of information, they are relevant.
Being aware of a policy rule and accordingly
being aware of the required fact to follow the policy
rule, the agent might go for finding these
information if it is possible. When an agent receives
an event pertaining to a policy rule, for each world
in all accessible paths, and until it is not aware of the
policy rule, the agent is aware of two things: (1)
conditions occurring in the policy rule, and (2) the
fact that in that world, the involved event has
occurred. How the agent will change its behavior
after it finds relevant information is modelled.
Updates in awareness knowledge lead to changes in
agent’s behaviors. This may happen in two ways: (1)
Awareness Deliberation; or (2) Following Policy
Rules. To have Awareness Deliberation, following
Rao and Georgeff’s definitions (Rao et al 1995), we
add blind and single-minded agents to our
definitions. We define a blind agent to be the one
who maintains its awareness about the optional truth
of a formula until it implicitly knows the formula or
its negation. We define a single-minded agent to be
the one who maintains its awareness about the
optional truth of a formula until one of following
happens: (1) it implicitly knows the formula; (2) it
implicitly knows the negation of the formula; (3) it
does not know that the formula can be optionally
true now or in future; and (4) it does not know that
the formula can be optionally false now or in future.
The possibility here of achieving truth or falsehood
of the formula has been added to capture the ability
of the agent to find out the information that it is
aware of. The basic idea, here, is such that being
aware of the information, a blind agent selects the
paths that lead the agent to implicitly know the
information or its negation. The single-minded agent
checks also the possibility of acquiring such
information. As there are often more than one path,
we recommend the shortest-path strategy.
Figure 3 shows the model entities (1) agent’s
Awareness Deliberation and (2) Following Policy
Rules has the relationship of perform, which means
“Does an action”. Performing an action makes the
agent transfer from one world to another one. When
the action is done and the agent is transferred to the
new world, the agent will add the action to the Done
Action set and the procedure Done will return true.
An exception-list is used to include all the actions
that the agent cannot perform as determined by the
policy rules (as forbidden actions). Then the agent
according to the short-path strategy finds an action
(in the shortest path) that is not forbidden and thus
ends up in the shortest path to implicitly know its
awareness. Exceptions are computed by using a
procedure which forces an agent to do a certain
required action even if it is not encouraged by its
awareness. The procedure Does returns the action
to do and the procedure transfer transfers the
agent from the current world to the next one. The
agent will perform the actions as guided by its
awareness, if there is currently no required action.
The agent will not perform any forbidden actions,
even if it is encouraged by its short-path awareness
deliberation strategy.
4 VALIDATION
To illustrate our MAAP framework for policy
awareness, we consider the following scenario:
Approximately 82 seconds after the launch of The
Space Shuttle Colombia Jan 16, 2003, a piece of
thermal insulation foam broke off the external tank
striking the Reinforced Carbon-Carbon panels of the
left wing. Five days into the mission, the
engineering team asked for high-resolution imaging
(Wilson 2003). While the Department of Defense
(DOD) had the capability for imaging of sufficient
resolution to provide meaningful examination,
NASA declared the debris strike as a "turnaround"
issue. Therefore, it failed to recognize the relevance
of possible damage in TSSC to the situation and did
not ask DOD for any imaging. During re-entry to the
ICSOFT 2011 - 6th International Conference on Software and Data Technologies
356

earth atmosphere over Texas, on Feb 1, 2003, the
shuttle disintegrated claiming the lives of all seven
of its crew. If NASA had recognized the relevance
of information about the TSSC and had requested
imaging from DOD, there would have been a rescue
procedure available by spacewalk for repairmen
(Wilson 2003). At the time of the accident, there
were the policy guidelines in NASA stating that
when a possible strike is reported, if there is any
TSSC damage, the spacewalk repairmen procedure
must be operated. The protocol had been also
established between NASA and DOD for high
resolution imaging. Therefore, although the
capability and the guidelines were available, NASA
could not recognize the relevance of information,
which led to deny image request and accordingly
death of seven people as well as loss of Space
Shuttle Colombia. NASA management, bombarded
with irrelevant and loosely relevant information,
could not recognize which policy should be applied
in the situation and which information is required to
be gathered. They could not realize the high
possibility of debris strike. as relevant information
for cooperation, NASA management should have
been aware of the accrued information of TPS but
they were not.
One of the policy rules in this case says that when
a possible strike is reported, if there is any TPS
damage, the spacewalk rescue procedure must be
operated. Although NASA management team did
not know the TPS damage, there existed a possibility
implying that TPS might have been damaged and it
was possible for NASA to recognize that the policy
rule was going to be broken. In fact, if NASA had
considered TPS damage as relevant information, it
would have asked DOD for high resolution images
to find out the possible damage. Then, recognizing
the damage in TSP, NASA would have operated
space walk rescue procedure. However, when the
strike was reported as an event, the TPS damage as
the condition that the policy rule was a relevant
information, was overlooked by NASA.
NASA was not aware of TPS damage and
therefore, they decided to simply classify the
damage as turnaround effect rather than asking DOD
for imaging and investigating if it is really
turnaround effect i.e. shortest path. Applying MAAP
in this situation, we see that NASA becomes aware
of the TPS damage; although it does not implicitly
know there is any damage or not, it just recognizes
that TPS damage is a useful information. Therefore,
NASA recognizes that TPS damage is useful as well
as turnaround effect. Thus, NASA would choose to
ask DOD for imaging because there is an option in
future, which satisfies the implicitl knowledge about
truth or falsehood of TPS damage and the
turnaround effect.
We applied the MAAP strategy of awareness to
the Space Shuttle Columbia disaster case, and
implemented it using the NetLogo MAAP library.
We designed four different policies and out of these
policies, we made eighteen policy rules. We also
designed ten different scenarios, that were similar to
the real incident reported in (Wilson 2003). Some of
these scenarios required a policy rule to react
correctly and some of them did not. Our simulation
involved eighteen steps where in step 1 it chose only
one policy rule, in step 2, it chose two and so on.
The program repeated each step one hundred times
while each time it selected random policy rules and
chose a random scenario out of the ten designed
scenarios. The simulator ran each selected scenario
with policy rules following MAAP and without
policy rules following the standard Logic of General
Awareness. The program records the total number of
the failures of each of the steps with and without
using MAAP. (Failure was defined as not doing a
certain action and not achieving a certain situation
given to the simulator for each scenario.) Taking this
simulation into account, we found that the reason
why the improvement had a “kink” at two points
was that at these two steps, the policy rules did not
match with the scenarios i.e. received events and
done actions. This actually happened because of the
randomized procedure taken to generate the input
data. In other words, the policies taken were not
related to the chosen scenario in the “kink” points.
However, as the number of policy rules increased,
not in all scenarios the chosen policy rules were
found to be useful. In fact, although the overall
improvement remains positive, in order to have
better performance, the policy rules should be
appropriate for a chosen scenario. The overall
outcome for this evaluation is that MAAP by
increasing the number of policy rules becomes a
more effective methods. This is actually supported
by what is proposed as a fundamental in MAAP and
suggested in awareness model of DEN-ng (Strassner
et al 2009).
5 CONCLUSIONS
Research in CSCW and intelligent agents
demonstrated the need for a definitive method to
compute awareness. This paper introduces MAAP as
a modelling method based on LGA and proposes the
use of policy rules as an alternative source of
MODELING AWARENESS OF AGENTS USING POLICIES
357

awareness. This can avoid bombarding an individual
(agent) with irrelevant or loosely relevant
information. Our approach has a three limitations:
First, the design of LGA and accordingly MAAP are
based on intersecting implicit knowledge and
awareness to get explicit knowledge. Intersecting
awareness and implicit knowledge may lose some of
the relevant information. As we propose use of
policies for computing awareness, this may lead to
violating policies. In such situations, the agent in
fact is not capable of following the policy rules.
Therefore, the assumption in MAAP is that design of
policies is based on the agents’ capabilities, which is
somewhat too ideal. A method to recognize
disability of agents to follow a policy rule must be
designed to enhance MAAP for future work.
Second, policy rules may interact with each other
and a newly added policy rule may conflict with the
existing ones. Third, refining high-level policies to
computational policy rules is a challenging task by
itself, which consists of: (1) Determining the
resources that are needed to satisfy the requirements
of a policy during unexpected situations, such as
disasters, (2) Transforming high-level policies into
role-level DEN-ng policy rules, (3) Verifying that
the lower level policy rules actually meet the
requirements specified by the high-level policies.
That opens a new direction for research to enhance
MAAP policy refinement methods.
Finally, MAAP is specified only for DEN-ng
policy rules. The reason, as it has been described, is
that the awareness model of DEN-ng policy rules is
strongly well cited and well equipped by supportive
tools. This can be also useful to generalize the idea
of MAAP. In fact, we can say that the agent will be
aware of each conditional proposition, while there is
a possibility now or in future to violate the
proposition. As such, the agent needs to become
aware of the propositions ad its associated
conditions.
REFERENCES
Beydoun, G., G. Low, H. Mouratidis and B. Henderson-
Sellers. “A security-aware metamodel for multi-agent
systems (MAS).” Information and Software
Technology 51(5): 832-845, 2009.
Beydoun, G., Low, G., Henderson-Sellers, B., Mouraditis,
H., Sanz, J. J. G., Pavon, J., Gonzales-Perez, C.
“FAML: A Generic Metamodel for MAS
Development.” IEEE Transactions on Software
Engineering 35 (6), 841-863, 2009.
Daneshgar, F., and Ray, P.,“Awareness Modeling and Its
Application in Cooperative Network Management,”
2000, p. 357.
Fagin, R., and Halpern, J. “Belief, awareness, and limited
reasoning,” Artificial Intelligence, vol. 34, pp. 76, 39,
1988.
Halpern, J., and Pucella, R. “Dealing with logical
omniscience: Expressiveness and pragmatics☆,”
Artificial Intelligence, 2010.
Kinny, D., and Georgeff, M. “Modelling and Design of
Multi-Agent Systems,” 1996.
Rao, A., and Georgeff, M. “BDI Agents: from Theory to
Practice,” 1995.
Rao, A. and Georgeff, M., “Modeling Rational Agents
within a BDI-Architecture,” 1991.
Ray, P., Shahrestani, S., and Daneshgar, F., “The Role of
Fuzzy Awareness Modelling in Cooperative
Management,” Information Systems Frontiers, vol. 7,
no. 3, pp. 299-316, 2005.
Sloman, M. “Policy driven management for distributed
systems,” Journal of Network and Systems
Management, vol. 2, no. 4, pp. 333-360, Dec. 1994.
Sillari, G., “Quantified Logic of Awareness and
Impossible Possible Worlds,” The Review of Symbolic
Logic, vol. 1, no. 04, pp. 514-529, 2008.
Strassner, G. et al., “The Design of a New Policy Model to
Support Ontology-Driven Reasoning for Autonomic
Networking,” Journal of Network and Systems
Management, vol. 17, no. 1, pp. 5-32, 2009.
Sadrei, E., Aurum, A., Beydoun, G., and Paech, B. “A
Field Study of the Requirements Engineering Practice
in Australian Software Industry”, International
Journal Requirements Engineering Journal 12 (2007),
pp. 145–162.
A. Talaei-Khoei, P. Ray, and N. Parameswaran, “Policy-
based Awareness: Implications in Rehabilitation
Video Games,” presented at the In the Proceedings of
Wawaii International Conference on System Sciences,
Hawaii, US, 2011.
Tran, QNN, Low, GC and Beydoun, G., “A
Methodological Framework for Ontology Centric
Agent Oriented Software Engineering”, International
Journal of Computer Systems Science and
Engineering, 21, 117-132, 2006.
Wilson, J., Report of Columbia Accident Investigation
Board, Volume I. USA: NASA, 2003.
Udupa, D., TMN: telecommunications management
network. McGraw-Hill, Inc. New York, NY, USA,
1999.
Zimmermann, H., “OSI reference model–The ISO model
of architecture for open systems interconnection,”
IEEE Transactions on communications, vol. 28, no. 4,
pp. 425–432, 1980.
ICSOFT 2011 - 6th International Conference on Software and Data Technologies
358
