MAC SCHEDULING IN LARGE-SCALE UNDERWATER
ACOUSTIC NETWORKS
Wouter van Kleunen, Nirvana Meratnia and Paul J. M. Havinga
Pervasive Systems, University of Twente, 7522 ND, Enschede, The Netherlands
Keywords:
MAC Scheduling, Large-scale underwater acoustic networks, Spatio-temporal scheduling.
Abstract:
The acoustic propagation speed under water poses significant challenges to the design of underwater sensor
networks and their medium access control protocols. Scheduling allows reducing the effects of long propaga-
tion delay of the acoustic signal and has significant impacts on throughput, energy consumption, and reliability.
In this paper we propose two approaches for scheduling large-scale underwater networks. One approach is a
centralized scheduling approach, which yields the most efficient schedules but has significant communication
and computational overhead. Our second approach uses clustering to split up the network in independent
clusters. This approach provides significant benefits in terms of communication and computation, but yields
less efficient schedules than the centralized approach.
We evaluate both approaches in terms of efficiency, communication overhead and computation overhead of
the resulting schedule. We show that the centralized approach yield the best schedule at the cost of significant
communication and computation overhead. The distributed scheduling approach yield less efficient schedules
but offers significant communication and computational complexity advantages.
1 INTRODUCTION
Design of an efficient medium access control proto-
col for underwater acoustic networks is difficult. Un-
derwater communication suffers from the slow acous-
tic propagation speed. Several underwater MAC pro-
tocols exist, examples include T-Lohi (Syed et al.,
2007) and Slotted-Fama (Molins, 2006). However
these protocols do not provide very high bandwidth,
while there is an interest in scheduling transmissions
to provide higher bandwidths. Examples of scheduled
MAC protocols include ST-MAC (Hsu et al., 2009),
STUMP (Kredo II and Mohapatra, 2010). In our pre-
vious paper (van Kleunen et al., 2011) we have pro-
posed a MAC scheduling approach which is far much
simpler than existing approaches. We have achieved
this simplicity by first deriving a set of simplified
scheduling constraints and using these constraints in
design of a simple scheduling algorithm for underwa-
ter communication.
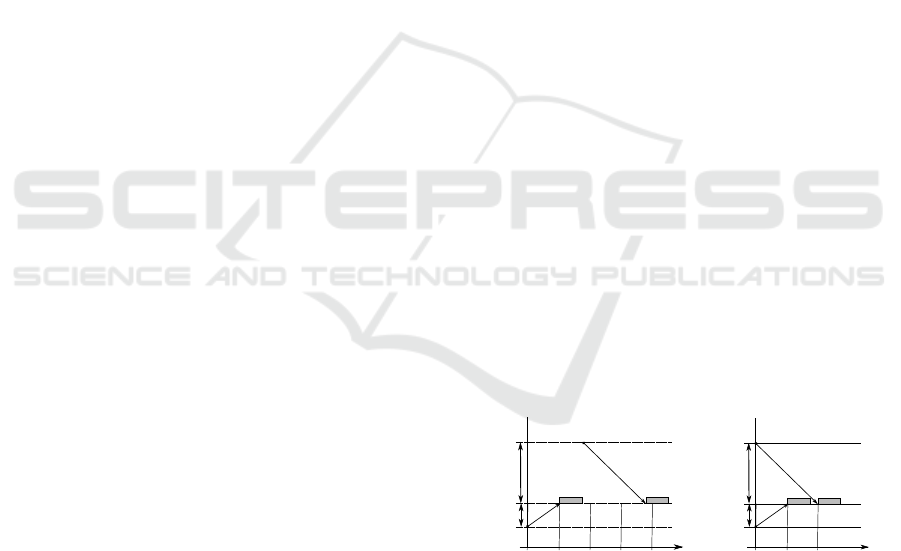
Scheduling communication brings significant ad-
vantages to underwater acoustic networks in that it ex-
ploits spatio-temporal uncertainty and reduces the im-
pact of long propagation delays. Figure 1 illustrates
how scheduling can exploit the long propagation de-
lays to provide higher throughputs.
(a) Exclusive access
(b) Scheduled
Figure 1: Exploiting spatio-temporal uncertainty of under-
water communication.
Centralized MAC scheduling approaches are able
to calculate efficient schedules but this comes with
significant costs. To run a centralized algorithm all
link and node information should be collected at a
central place, which introduces a significant commu-
nication overhead. If the network is large or dynamic,
it may not be feasible or desired to collect all link in-
formation at a central place. The computational com-
plexity of a centralized algorithm can also be high.
To this end, the ability to run the algorithm distribut-
edly on several nodes can reduce the overall compu-
tation time. Using a distributed approach will come
at the cost of suboptimal schedules, which should be
reduced as much as possible.
In this paper we present how the complexity of
27
van Kleunen W., Meratnia N. and J. M. Havinga P..
MAC SCHEDULING IN LARGE-SCALE UNDERWATER ACOUSTIC NETWORKS.
DOI: 10.5220/0003438600270034
In Proceedings of the International Conference on Wireless Information Networks and Systems (WINSYS-2011), pages 27-34
ISBN: 978-989-8425-73-7
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

given j for all i < j,
δ
j
.start ≥ δ
i
.start + δ
i
.duration if δ
i
.src = δ
j
.src
δ
j
.start ≥ δ
i
.start +δ
i
.duration+max(
T(δ
i
.src,δ
i
.dst) −T(δ
j
.src,δ
i
.dst),
T(δ
i
.src,δ
j
.dst) −T(δ
j
.src,δ
j
.dst))
if δ
i
.src 6= δ
j
.src
Figure 2: Set of simplified scheduling constraints.
the algorithm proposed in (van Kleunen et al., 2011),
which allows exploiting the long propagation delays
in underwater acoustic communication, can be re-
duced to allow scheduling of large-scale underwater
networks. This reduced complexity centralized ap-
proach can be used in scenarios in which the com-
munication overhead is not an issue and the aim is to
achieve the best possible schedule.
We will also present how a clustered approach can
significantly reduce the computational and communi-
cation overhead of scheduling large-scale underwater
networks. A large part of the communication of our
distributed clustered approach is done locally (sin-
gle hop) and the computational communication is low
enough to be implemented on embedded processors.
The distributed clustered approach calculates less ef-
ficient schedule but the communication and computa-
tional overhead scales much beter to larger-scale un-
derwater networks.
The outline of the paper is as follows: in Sec-
tion 2 the related work will be discussed. An extended
set of simplified scheduling constraints for scheduling
multi-hop networks will be presented in Section 3.
In Section 4 a centralized algorithm with reduced
complexity is proposed. Section 5 describes our dis-
tributed scheduling technique, which uses a clustering
concept to split up the scheduling problem. Evalu-
ation of the communication and computational com-
plexity of different approaches is presented in Sec-
tion 6, while performance evaluations of the different
approaches will be presented in Section 7. In Sec-
tion 8 conclusions are drawn and future directions are
highlighted.
2 RELATED WORK
Scheduling approaches for underwater acoustic trans-
missions, which allow mitigating the effects of the
propagation delay, already exist in literature. These
approaches range from centralized to distributed ap-
proaches. ST-MAC (Hsu et al., 2009) is a centralized
scheduling approach, which uses timeslots to form a
collision free schedule. In (van Kleunen et al., 2011)
we have shown that the slotted approach used by ST-
MAC leads to suboptimal results.
STUMP-WR (Kredo II and Mohapatra, 2010)
provides a fully distributed approach to schedule un-
derwater communication. It also uses timeslots, sim-
ilar to the approach of ST-MAC, which has been
shown to lead to suboptimal results. STUMP-WR de-
rives a node schedule from local interference patterns
and link schedules from neighbouring nodes. Nodes
broadcast their route as well as link schedule updates
during control frames until the network converges.
This approach is quite interesting because it is fully
distributed. Nodes are able to schedule their transmis-
sions based on their own information and schedules of
neighbours. This may, however, require a significant
amount of communication between nodes and special
attention should be paid to ensure that the nodes con-
verge to a schedule in networks facing packet loss.
Because of the way STUMP-WR works, the pos-
sibilities of ordering the transmissions are limited.
The first schedules will be formed using a limited
amount of transmissions. Other nodes will extend
their schedules using their transmissions but will
not move existing transmissions to improve schedule
times. This will result in less optimal schedules from
a throughput point of view.
Another problem with STUMP-WR (Kredo II and
Mohapatra, 2010) might be that transmissions still
cause interference at certain nodes. This is because
in a real network setup, nodes may not always be able
to communicate with nodes that they might interfer.
The interference range might actually be larger than
the communication range. The completely distributed
approach is an interesting approach nonetheless.
In (van Kleunen et al., 2011), we have already
shown how the scheduling constraints for underwa-
ter communication can be reduced to a simplified set.
Using these constraints we introduced two scheduling
algorithms: one algorithm assumes a given order of
transmissions and the other one selects the most op-
timal order of transmissions and derives a schedule.
The set of scheduling constraints assumes all nodes
are within transmission range of each other and all
schedulings are done in a centralized manner. This
necessitates availability of knowledge from all nodes
and transmissions at a central place in the network,
which introduces a significant communication over-
head. In Figure 2 the set of simplified scheduling
constraints are given. The set gives a constraint be-
tween two transmissions (δ
i
and δ
j
), which both have
WINSYS 2011 - International Conference on Wireless Information Networks and Systems
28

a source (δ
i
.src and δ
j
.src), destination (δ
i
.dst and
δ
j
.dst), and duration (δ
i
.duration and δ
j
.duration).
The function T gives the propagation time between
two positions. The simplified set gives a constraint
between transmission δ
j
and all previously scheduled
transmissions ( for all δ
i
where i < j). A minimum
start time can be calculated which satisfies the con-
straint with all earlier schedule transmissions. The
proposed algorithm in (van Kleunen et al., 2011),
which minimizes the schedule length, works by first
calculating a two-dimensional table with the minimal
delay between all pairs of transmissions. The algo-
rithm considers every transmission as first transmis-
sion, calculates a minimal schedule with every trans-
missions as first transmission, and selects the best
schedule. The schedule is calculated by scheduling
transmissions iteratively. The transmission which has
the minimum delay with respect to all previous trans-
missions is selected as next transmission. This is a
greedy approach. The delays for all transmissions
with respect to all previous scheduled transmission
are updated after each iteration. The greedy approach
of trying to minimize the delays leads to the most ef-
ficient schedule, in terms of schedule length. The re-
sulting schedule is collision-free for all nodes in the
network and it considers all nodes to be within com-
munication range (one-hop). The transmission times
are continous, although the algorithm can also be used
for calculating slotted transmission times.
In (Stojanovic, 2008) and (Peleato and Stojanovic,
2007) the possibility of underwater cellular networks
has been investigated. In the latter a protocol is
proposed for channel sharing using cellular network,
which only considers communication from and to the
base-station.
1
3
1
3
2
1
2
1
3
2
3
2
i = 1
j = 1
D = R
√
3N
Figure 3: Cellular network example.
Figure 3 shows an example of a cellular network.
The whole area is split into hexagonal cells and every
cell is assigned a frequency. A group of cells together
form a cluster, within which a frequency is used only
once. The number of cells within a cluster determines
the reuse distance (D), i.e, the minimum distance be-
tween two cells that share the same frequency.
The work of Peleato et al. (Peleato and Stojanovic,
2007) does some form of scheduling by splitting up
the time into two phases. In the first phase, nodes
that are the furthest away from the base-station are
allowed to transmit. In the second phase, the inner
nodes will transmit. These phases should run more-
or-less synchronized between the cells. The cells ex-
perience the most interference from surrounding cells
during the second phase, while the first phase will be
more or less free of interference. The nodes in the sec-
ond phase are closer to their destination (which will
be the base-station) or source (also the base-station).
Therefore the signal will experience less attenuation
and is able to achieve the desired signal to noise ratio
even when the reuse distance (D) is small. Due to the
fact that the reuse distance is small a higher through-
put can be achieved.
3 EXTENDING THE SET OF
SIMPLIFIED RULES
Before we begin describing our proposed schedul-
ing algorithm, we first extend the set of simplified
scheduling rules and explain how multihop schedul-
ing can be added.
Two nodes are outside of interference range of
each other if the signal of one node results in a re-
ceived signal strength on the other node which is be-
low a certain threshold (TH
cp
). The value of this
threshold (TH
cp
) should be chosen in such a way that
interfering signals are always below the receiver sen-
sitivity of the node or the interfering signal can be
guaranteed to be captured by the wanted transmission.
The received signal strength is dependant on the
output power of the sender and the attenuation be-
tween the sender and the receiver. The attenuation
between nodes is dependent on the absorption rate of
the water and the spreading of the signal. This path
loss equation can be written as follows:
10log(d, f) = k·10logd + d ·10loga( f) (1)
The path loss is dependant on the carrier fre-
quency (f) of the signal as well as the distance (d) be-
tween sender, and receivery. The spreading factor is
MAC SCHEDULING IN LARGE-SCALE UNDERWATER ACOUSTIC NETWORKS
29

δ
j
.start ≥ δ
i
.start +δ
i
.duration
if δ
i
.src = δ
j
.src
δ
j
.start ≥ δ
i
.start +δ
i
.duration+max(
T(δ
i
.src,δ
i
.dst) −T(δ
j
.src,δ
i
.dst),
T(δ
i
.src,δ
j
.dst) −T(δ
j
.src,δ
j
.dst))
if δ
i
.src! = δ
j
.src and (Inter f er(δ
i
.src,δ
j
.dst)
or Inter fer(δ
j
.src,δ
i
.dst))
δ
j
.start ≥ δ
i
.start otherwise
(2)
Figure 4: Extended set of simplified scheduling constraints allowing multi-hop scheduling.
constant, which can either be spherical (k = 2), cylin-
drical (k = 1), or somewhere in between.
Using this formula we can calculate whether two
nodes interfer with each other. Consider two trans-
missions δ
i
and δ
j
, both transmissions have a source
(δ
i
.src and δ
j
.src) and destination (δ
i
.dst and δ
j
.dst).
We will use the path loss function (PL) to calculate
the difference of the received signal strengths at the
destination of transmissions (δ
j
):
Inter fer(δ
i
,δ
j
) = TRUE if
PL(δ
j
.src,δ
j
.dst) −PL(δ
i
.src,δ
j
.dst) ≤ TH
cp
(3)
Function (3) will return false if transmission δ
i
does not cause interference for transmissions δ
j
. We
will now show how this equation can be applied to
the set of simplified scheduling rules. The interfer-
ence rule only applies when two nodes are able to in-
terfer with each others transmissions. If δ
i
.src is out
of range of δ
j
.dst and δ
j
.src is out of range of δ
i
.dst,
there is no constraint between the two transmissions.
In Figure 4 the set of extended scheduling con-
straints is shown. We added the interference condition
to the interference rule and added a scheduling rule in
case two transmissions are outside interference range.
This set of constraints can be used in large networks
where nodes can be outside of each others interfer-
ence range.
4 A CENTRALIZED
SCHEDULING APPROACH FOR
HIGH-EFFICIENCY
SCHEDULES
The extended set of simplified constraints from Sec-
tion 3 can be applied to design a scheduling algo-
rithm with low complexity for large-scale underwater
networks. The algorithm from (van Kleunen et al.,
2011), which has O(n
3
) complexity, considers every
transmission as the first transmission. To reduce the
complexity, we can take a random or the first trans-
mission as the transmission to be scheduled at time 0.
This will reduce the complexity of the algorithm from
O(n
3
) to O(n
2
).
When we calculate the schedule only once, there
is also no need anymore to precalculate a table of de-
lays for all transmission pairs. Any transmission pair
will be considered at most once, but some will never
be calculated. At the first iteration the algorithm will
calculate the delays for n −1 pairs, the second itera-
tion n −2, and so forth. This will further reduce the
complexity from O(n
2
) to O(
1
2
n
2
). Because we do
not calculate the delay table, the memory space com-
plexity can also be reduced to O(n).
The full algorithm can be seen in Figure 5. The al-
gorithm initially schedules the first transmission. In-
side the scheduling loop first all the minimum start-
ing times for the remaining transmissions are calcu-
lated. The loop also finds the transmission with the
minimum schedule time and removes this transmis-
sion from the set of to be scheduled transmissions.
This is repeated until all transmissions are scheduled.
In this way not only the computational complexity re-
duced, but also the algorithm is now small and easy to
understand.
5 A DISTRIBUTED SCHEDULING
APPROACH WITH LOW
COMPUTATIONAL AND
COMMUNICATION
COMPLEXITY
In Section 4 we have presented an algorithm for
scheduling large-scale underwater networks in a cen-
tralized manner. However this algorithm requires
multi-hop communication to gather informationabout
all required transmissions within the network. This
has a significant overhead and because it is done be-
fore scheduling, this communication will be done in
an unscheduled way.
To solve this communication overhead problem
we propose a distributed scheduling approach based
on a clustering concept. We propose a technique in
which cluster-heads are time-schedule arbriters for a
cluster and nodes will send a request to the cluster-
head to do a communication. The clusters are as-
signed a timeslot, which can span up to several sec-
onds and will schedule all the requested transmissions
WINSYS 2011 - International Conference on Wireless Information Networks and Systems
30

V ←transmissions {Set of all transmissions}
schedule ← [N] = 0 {Resulting schedule}
schedule[0] = 0 {Schedule the first transmission}
time = 0
last = 0
V ←V \δ
0
{Remove transmission from set}
{Scheduling loop schedules transmissions greedy}
while !empty(V) do
time
min
← in finity
{Calculate minimum starting time for remaining trans-
missions}
for δ ∈V do
schedule[δ
index
] = max(schedule[δ
index
],time +
constraint(δ
last
,δ
index
)]
{See if this transmission has the smallest starting
time}
if schedule[δ
index
] < time
min
then
time
min
← schedule[δ
index
]
index ←δ
index
end if
end for
{Schedule transmission with smallest starting time
first}
time = time
min
last = index
V ←V \δ
index
end while
Figure 5: Reduced complexity algorithm for scheduling
transmissions.
1
4
5
1
2
3
6
7
3
4
5
1
2
5
6
7
3
4
7
1
Figure 6: Example of a deployment.
in their timeslot. The timeslots can be reused in other
clusters and this will ensure that no interference or
minimal interference occurs between clusters.
In Figure 6 an example deployment is shown. The
cluster-heads are in the center of their cluster and the
numbers shown in the cluster indicate the used times-
lot of the cluster. The small dots are sensor nodes
scattered across the complete deployment area and the
lines between nodes indicate communication links.
Communication does not necessairly have to be done
from or towards the cluster-heads and can be done to
any node within the communication range. The links
are set up in such a way that information is collected
at a central sink.
The size of the clusters is dependant on the com-
munication range of the nodes. We assume that all
nodes in the network use the same output power for
transmissions and will therefore have the same com-
munication range. All nodes within the cluster should
be able to communicate with the cluster-head, there-
fore the cluster size should not be bigger than the
communication range. We assume the radius of the
cluster is exactly the size of the maximum communi-
cation range. The actual size can be calculated using
the path loss Equation (1).
The clusters in our approach are similar to cells
in a cellular network. If we assume the shape of a
cluster in our approach is hexagonal, we can then use
the equations from cellular networks to calculate the
number of timeslots required. The number of times-
lots determines the reuse distance, one may recall that
the reuse distance is the minimum distance between
two clusters that share the same timeslot, see Figure 3
for an example.
The number of timeslots can not arbitrarly be cho-
sen and is determined from the following formula:
N = i
2
+ ij + j
2
(4)
The i and j parameters determine the reuse dis-
tance of a timeslot along two axis. The reuse distance
(D) can be calculated from the number of cells per
cluster (N) and the cell radius (R):
D = R
√
3N (5)
The reuse distance is the minimum distance be-
tween two interfering senders in the network. The
larger the distance between two interferers, the less
interference experienced during communication. If a
total of 3 timeslots are used, the closest distance be-
tween two interfering nodes is exactly the radius of
the cluster. If more timeslots are used, the distance
between two interfering nodes will be larger, result-
ing in less noise from neighbouring clusters.
The nodes within a cluster all register their trans-
missions to the closest cluster-head. The cluster-
head is therefore able to schedule all the transmis-
sions within its cluster. After doing so, it will send
the minimum length of its local schedule to the cen-
tral cluster-head. The central cluster-head will assign
timeslots to the clusters and determine the length of
each timeslot. The timeslots do not necessairly have
MAC SCHEDULING IN LARGE-SCALE UNDERWATER ACOUSTIC NETWORKS
31

Cluster
1 2 3 4 5 6 Max
Slot 1 1.33 1.57 1.57
Slot 2 1.61 1.43 1.61
Slot 3 1.37 1.45 1.45
Slot length 1.57 1.61 1.45 1.57 1.61 1.45
Figure 7: Results of calculating slot length based on cluster
schedule lengths.
to be of equal time. The central cluster-head will as-
sign the maximum schedule length of all clusters that
share the same timeslot.
The cluster-heads will determine the order of
transmissions within their cluster. This can be
done using different optimization criteria as presented
in (van Kleunen et al., 2011). We will be using the
greedy approach in which transmissions are sched-
uled based on minimum delay.
For scheduling the transmissions within a cluster
we can use the algorithm from (van Kleunen et al.,
2011) or the reduced complexity algorithm from Sec-
tion 4. The second algorithm will yield a smaller com-
putational and memory space complexity, but because
the number of transmissions per cluster is in practice
limited, the first algorithm may as well be a good op-
tion.
Figure 7 shows an example of how the algorithm
works. The table shows for all clusters the calculated
cluster schedule lengths. The cluster-head schedules
all transmissions within its cluster and determines the
clusters schedule length. The central scheduler deter-
mines the maximum of all schedule lengths per slot
and assigns the maximum schedule length to the slot.
The cluster-heads and the central scheduler only need
to communicate the schedule length and slot lengths.
6 EVALUATION OF
COMMUNICATION AND
COMPUTATION COMPLEXITY
We evaluate the different centralized and distributed
scheduling approaches. We will discuss briefly their
complexity in terms of number of communications
required as well as computational complexity of dif-
ferent approaches. The complexity overview of all
scheduling approaches can be seen in Figure 8.
• Centralized Scheduling: In this case we assume
all transmission as well as position information is
collected in a central location. The communica-
tion complexity is n·hops
avg
(The average num-
ber of hops), because all transmission information
needs to be sent over a multi-hop link to the cen-
tral scheduler. For scheduling the links we will
use the algorithm described in (van Kleunen et al.,
2011), whose complexity is O(n
3
).
• Reduced Complexity Centralized Scheduling:
This is the algorithm described in Section 4.
The computational complexity of this algorithm
is O(
1
2
n
2
). The communication complexity is
the same as the other centralized scheduling ap-
proach, namely O(n
3
).
• Distributed Scheduling: In the distributed sit-
uation, the transmissions are sent only to the
cluster-head (O(n) communications). The cluster-
head will calculate a schedule for its own clus-
ter and will forward the length of its sched-
ule over a multi-hop link to the central sched-
uler (O(hops
avg
k) communications). On average,
the number of transmissions per cluster is n/k,
which results in a computational complexity of
O((n/k)
3
) per cluster, but also for the whole net-
work.
• Distributed Reduced Complexity Scheduling:
It is similar to the distributed approach, but the
scheduling per cluster uses the reduced com-
plexity centralized scheduling algorithm. This
reduces the scheduling algorithm complexity to
O(
1
2
(n/k)
2
) per cluster. The communication com-
plexity remains O(hops
avg
k).
The packet size of all approaches is constant and
does not grow with respect to the number of nodes
in the network. From the evaluation of the complex-
ity of the different approach, we can see that the dis-
tributed approaches have a much lower computational
and communication overhead compared to the cen-
tralized approaches. The scalability of the distributed
approaches is therefore much better than the central-
ized approaches.
7 EVALUATION OF
SCHEDULING EFFICIENCY
To evaluate the scheduling efficiency of the different
approaches, we implement them in c++. We evalu-
ate the algorithms for different sizes of deployments.
The parameters can be found in Figure 9(a). The net-
work size ranges from 500 up to 8000 nodes scattered
randomly over an area. The communications are set
up in such a way that all data is collected at a central
sink, similarly to the deployment in Figure 6.
For the different distributed scheduling ap-
proaches a reuse distance should be selected. We
evaluated the distributed algorithms with both 3 as
well as 7 timeslots.
WINSYS 2011 - International Conference on Wireless Information Networks and Systems
32
Scheduling approach Computational Communication Packet size
Centralized O(n
3
) 2(n·hops
avg
) O(1)
Reduced Complexity Centr. O(
1
2
n
2
) 2(n·hops
avg
) O(1)
Distributed O((n/k)
3
) 2(n+ k·hops
avg
) O(1)
Distributed Reduced Complexity O(
1
2
(n/k)
2
) 2(n+ k·hops
avg
) O(1)
n = Number of transmissions
k = Number of clusters
Figure 8: Complexity of different scheduling approaches compared.
Parameter Value
Communication range: 500m
Data rate: 1000bps
Propagation speed: 1500 m/s
Node placement: random / uniform
(a) General parameters
Parameter Small Medium Large
Clusters: 4 x 3 7 x 7 14 x 14
Area size: 3.2 x 3.1km 5.5 x 6.6km 11 x 13km
Nodes: 500 2000 8000
(b) Different deployment sizes
Figure 9: Simulation parameters.
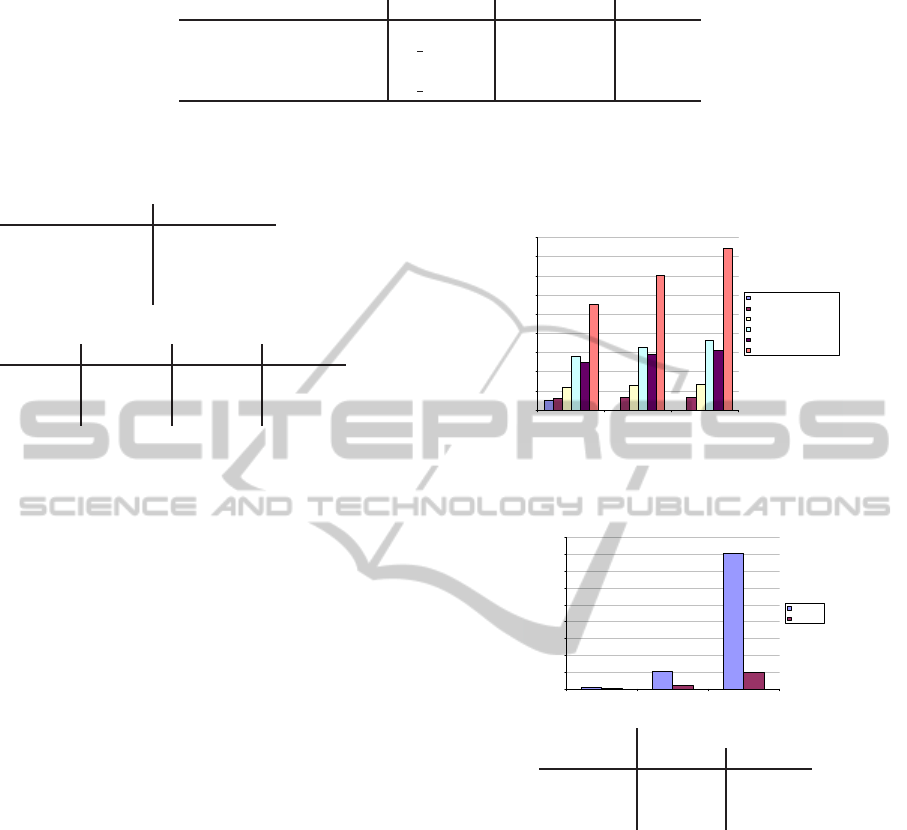
The evaluation results are shown in Figure 10(a).
We see that the centralized approach performs the
best, which is expected. This is due to the fact that
the centralized approach has all link and deployment
information of the network during the scheduling,
while the distributed approach splits up the schedul-
ing in sub-problems and uses local information only.
The centralized approach places a lower bound on the
achievable schedule length.
The reduced complexity centralized algorithm
performs only slightly worse, the difference in sched-
ule lengths is only marginal. Therefore the reduced
complexity centralized algorithm is a good alterna-
tive to the full complexity centralized algorithm. In
Section 4 and Section 6 we have already shown that
the reduced complexity algorithm has large benefits in
terms of computation and memory complexity. From
the results of the simulation, we can conclude these
benefits come at almost no cost in terms of schedule
efficiency.
Among the distributed approaches, the distributed
approach which minimizes schedule length and uses
3 timeslots, performs about twice as worse as the cen-
tralized approach. The approach that orders the trans-
missions based on distance of the transmission per-
forms worse. The fact that the distributed approach
performs worse when the network size increases is
because for every timeslot the maximum schedule
length from all clusters using that timeslot is used.
If more clusters use the same timeslot, the maximum
schedule length over all these clusters will go up.
In Figure 10(b) the amount of communications cy-
(a) Schedule length of different scheduling ap-
proaches
Scheduling approach
Network size Centralized Distributed
500 2813 1040
2000 21147 4418
8000 160878 19540
(b) Number of communication cycles required
to setup schedule
Figure 10: Results of simulation for different deployments
and scheduling approaches.
cles required to set up the network are shown. The
difference between the centralized and distributed ap-
proach can be seen quite clearly. The centralized ap-
proach does not scale very well to larger sizes and
requires large number of communication cycles. The
distributed approach grows almost linearly with the
size of the network, the number of communication
cycles required is a little over 2 times the number of
nodes in the network. The packet size of the messages
is independant of the number of nodes in the network
as has been noted before and contains only position
and transmission information, or total schedule length
for the cluster heads.
MAC SCHEDULING IN LARGE-SCALE UNDERWATER ACOUSTIC NETWORKS
33

8 CONCLUSIONS
Scheduling algorithms for underwater communica-
tion allows mitigating the effects of the long propaga-
tion delay of the acoustic signal. Scheduling has sig-
nificant benefits in terms of throughput, energy con-
sumption, and reliability.
In this paper we extended the set of simplified
scheduling constraints of (van Kleunen et al., 2011)
to allow scheduling of multi-hop networks. We have
introduced a centralized and a distributed schedul-
ing techniques for underwater acoustic communica-
tion systems.
The reduced complexity centralized approach has
O(
1
2
n
2
) computational complexity but introduces sig-
nificant communication overhead.
The distributed approach groups all transmissions
together in clusters from which they originate. Nodes
within a cluster communicate with the cluster-head
only for scheduling their link. Our approach does
not place any restrictions on the communication pat-
terns. It does not restrict communication between
base-station and node and nodes can communicate di-
rectly with other nodes within communication range.
Each cluster-head will calculate a schedule for its
cluster and will forward the total schedule length of its
cluster to a central scheduler. The central scheduler
will schedule the timeslots and assign a timeslot to
each cluster. Compared to the centralized approach,
the distributed approach has a much lower communi-
cation and computational overhead.
We evaluated the communication and computa-
tional complexity and showed that the distributed ap-
proach is much more scalable towards larger net-
works. We also evaluated the schedule lengths of dif-
ferent scheduling approaches. The reduced complex-
ity centralized approach calculates only marginally
less efficient schedules, and is therefore a good re-
placement for the full complexity approach. The
schedule lengths of the distributed approach are on
average 270% of the centralized approach when 3
timeslots are used, and 580% when 7 timeslots are
used. This shows that when the scalability, compu-
tational and communication benefits are irrelevant a
centralized approach is still much preferred.
Future work includes considering the effects of
acoustic signal such as refraction, multipath and prop-
agation speed variability on performance. Other ef-
fects that will be considered are node dynamics, po-
sition estimation errors and time-synchronisation er-
rors.
ACKNOWLEDGEMENTS
This work is supported by the SeaSTAR project
funded by the Dutch Technology Foundation (STW).
REFERENCES
Hsu, C.-C., Lai, K.-F., Chou, C.-F., and Lin, K. C.-J. (2009).
St-mac: Spatial-temporal mac scheduling for under-
water sensor networks. In INFOCOM, pages 1827–
1835. IEEE.
Kredo II, K. and Mohapatra, P. (2010). Distributed schedul-
ing and routing in underwater wireless networks.
Globecom 2010.
Molins, M. (2006). Slotted fama: a mac protocol for un-
derwater acoustic networks. In In IEEE OCEANS06,
Singapore, pages 16–19.
Peleato, B. and Stojanovic, M. (2007). A channel sharing
scheme for underwater cellular networks. In OCEANS
2007 - Europe, pages 1–5.
Stojanovic, M. (2008). Design and capacity analysis of
cellular-type underwater acoustic networks. In IEEE
Journal of Oceanic Engineering, vol.33, No.2, pages
171–181.
Syed, A. A., Ye, W., and Heidemann, J. (2007). T-lohi:
A new class of mac protocols for underwater acoustic
sensor networks. Technical report.
van Kleunen, W., Meratnia, N., and Havinga, P. J. (2011). A
set of simplified scheduling constraints for underwater
acoustic mac scheduling. AINA 2011.
WINSYS 2011 - International Conference on Wireless Information Networks and Systems
34
