
OBSERVER-BASED ADAPTIVE SLIDING MODE CONTROL
FOR UNCERTAIN SYSTEMS WITH DEAD-ZONE INPUT
Yu-Ting Kuo and Kuo-Ming Chang
Department of Mechanical Engineering, National Kaohsiung University of Applied Sciences, Kaohsiung, Taiwan
Keywords: Extension state observer, Adaptive control, Sliding mode control, Dead-zone, External disturbance.
Abstract: In this paper, an adaptive sliding mode control is proposed to address the tracking control objective of
uncertain nonlinear system preceded by an unknown dead-zone and with unmeasurable system state. Based
on the extension state observer, sliding mode control, and adaptive dead-zone inverse techniques, a robust
observer-based adaptive sliding mode control scheme is developed without available system state. The
proposed control scheme can ensure global stability of the controlled system subject to unknown nonlinear
function and external disturbance and achieve the tracking control objective satisfactorily.
1 INTRODUCTION
Generally, due to physical constraints of the
dynamical systems, it may exist some non-smooth
nonlinear characteristics in the control input, such as
backlash, saturation, dead-zone, which can severely
limit system performance or even result in system
unstability. Hence, the nonlinear effects should be
considered and compensated in analysis or
realization of a control system. Recently, non-
smooth nonlinearitites have been drawn much
attention in the control community.
Dead-zone is one of the most important non-
smooth nonlinearities arisen in actuator, such as
servo valves and DC servo motors. In recent years,
dead-zone has been extensively discussed in the
literature. In most practical motion systems, the
dead-zone is usually unknown. To handle systems
with unknown dead-zone, Tao and Kokotovic (1994;
1995) proposed continuous- and discrete-time
adaptive dead-zone inverses for linear systems with
unmeasurable dead-zone outputs to improve the
tracking performance by using dead-zone inverse.
Without constructing the dead-zone inverse, Wang
et al. developed a new robust adaptive approach of a
class of nonlinear system preceded by a dead-zone.
Ma and Yang further exploded an adaptive output
feedback control without the dead-zone inverse for
uncertain nonlinear system with an unknown non-
symmetric dead-zone. The considered system is
dominated by a triangular system without zero
dynamics satisfying polynomial growth in
unmeasurable states. Selmic and Lewis employed
neural networks to construct a dead-zone
precompensator, which is used to improve the
tracking performance of motion system in the
presence of unknown dead-zone. For controlling a
class of uncertain multi-input multi-output nonlinear
state time-varying delay systems with unknown
nonlinear dead-zone and gain signs, an adaptive
neural control is proposed by Zhang and Ge. This
control is designed based on the intuitive concept
and piecewise description of dead-zone and the
principle of sliding mode control and such this
control scheme can guarantee that all signals are
semi-globally uniformly ultimately bounded. Liu
and Zhou used the universal approximation property
of the fuzzy-neural networks to approximate
unknown nonlinear function and then presented an
observer-based adaptive fuzzy-neural control for a
class of uncertain nonlinear systems with unknown
dead-zone input to improve the control performance.
In this paper, an observer-based adaptive sliding
mode control approach for uncertain systems with
unknown dead-zone is proposed to achieve the
tracking control objective in the presence of
unknown system nonlinear function and external
disturbance. The paper is organized as follows:
Section 2 gives some descriptions of the system;
Section 3 presents the controller design based on
adaptive control, sliding mode control and extension
state observer techniques; The stability of the
controlled system is proved in Section 4 and
conclusions are made in Section 5.
317
Kuo Y. and Chang K..
OBSERVER-BASED ADAPTIVE SLIDING MODE CONTROL FOR UNCERTAIN SYSTEMS WITH DEAD-ZONE INPUT.
DOI: 10.5220/0003440203170322
In Proceedings of the 8th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2011), pages 317-322
ISBN: 978-989-8425-74-4
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
2 SYSTEM DESCRIPTIONS
Consider a class of
n
th-order single-input and
single-output uncertain nonlinear system with a
dead-zone function, which is described in the
following dynamical equation
)()(),,,,(
)1()(
tdtwtxxxfx
nn
++=
−
"
(1)
where
x
is the system output,
f
is an unknown
system nonlinear function,
)(td
is an external
disturbance, and
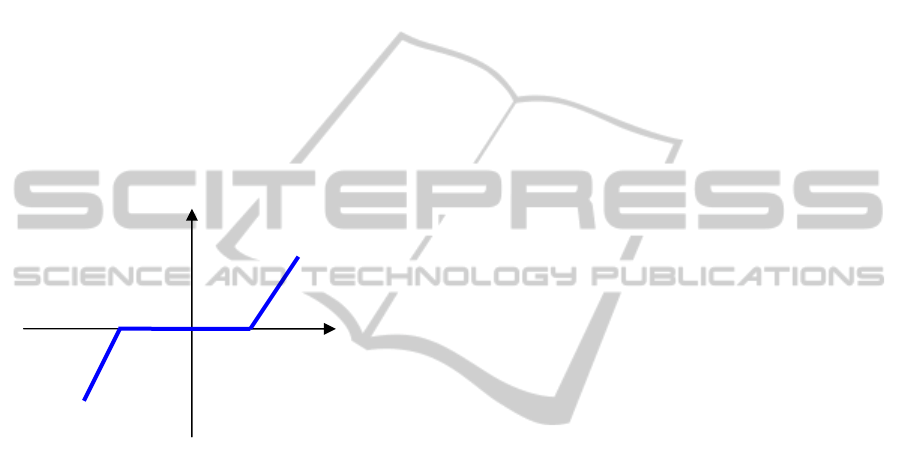
)(tw
is a dead-zone nonlinear
function. The dead-zone function with input
)(tu
and output
)(tw
is graphically shown in Fig. 1 for
some unknown constants
rlrl
mmbb ,,,0 <
∞<
.
Figure 1: Dead-zone function.
As shown in Figure 1, the dead-zone function
can be described mathematically by
⎪
⎩
⎪
⎨
⎧
−<+
≤≤−
>−
=
lll
rl
rrr
btu,btum
btub,
btu,btum
tw
)(if])([
)(if0
)(if])([
)(
(2)
Define a system state vector as
[
]
Tn
txtxtxt )()()()(
)1( −
= "
X
nT
n
Rtxtxtx ∈= )]()()([
21
"
(3)
Then, the system in (1) can be expressed by a
state space representation
21
xx =
32
xx =
#
nn
xx =
−1
)(( tdtwtfx
n
+
+
= ))( ,X
)(ta=
(4)
In this paper, the following assumptions, which
specify the class of uncertain nonlinear systems are
made as follows:
Assumption 1. Uncertain external disturbance
)(td
is a bounded function. It means that there exists one
positive constant
1
c
such that
1
|)(| ctd ≤
.
Assumption 2. Nonlinear function
)(ta
is assumed
to be differentiable with respect to time and its
derivative with respect to time is bounded, i.e.
2
|)(| cta
≤
with
0
2
>c
.
Let the desired state vector be
Tn
dddd
txtxtxt )]()()([)(
)1( −
= "
X
nT
dndd
Rtxtxtx ∈= )]()()([
21
"
(5)
Then, define the tracking error as
)()()( ttt
d
XXE −=
T
n
tetete )]()()([
21
"=
(6)
In this paper, the control objective is to design an
observer-based adaptive sliding mode control to
achieve
0)( →tE
as
∞
→
t
under the condition that
the system states are not available during the control
process.
3 OBSERVER-BASED ADAPTIVE
SLIDING MODE CONTROL
In this section, an observer-based adaptive sliding
mode control scheme will be developed to achieve
the state tracking control objective. Because system
states are not available, a so-called extension state
observer is constructed to obtain estimated system
states. On the constructing process of extension state
observer, an augmented state vector is given as
follows:
T
na
tatxtxtxt )]()()()([)(
21
"=X
T
nn
txtxtxtx )]()()()([
121 +
= "
(7)
Then, we have
21
xx
=
32
xx
=
#
nn
xx
=
−1
)(tax
n
=
)(
1
tax
n
=
+
(8)
In this paper, the extension state observer is
given in the following form
l
b−
l
m
r
b
)(tw
r
m
)(tu
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
318

)
ˆ
(
ˆˆ
11121
xxLkxx −−=
)
ˆ
(
ˆˆ
112
2
32
xxkLxx −−=
#
)
ˆ
(
ˆˆ
111
1
1
xxkLxx
n
n
nn
−−=
−
−
−
)
ˆ
(
ˆˆ
111
xxkLxx
n
n
nn
−−=
+
)
ˆ
(
ˆ
111
1
1
xxkLx
n
n
n
−−=
+
+
+
(9)
where
L
is a design positive constant, constants
121
,,,
+n
kkk "
are chosen according to the pole
assignment method. Define a state error vector
between the estimated augmented system state and
augmented system state as
)()(
ˆ
)(
~
ttt
aaa
XXX −=
T
n
T
n
txtxtxtxtxtx ])()()([])(
ˆ
)(
ˆ
)(
ˆ
[
121121 ++
−= ""
T
n
txtxtx ])(
~
)(
~
)(
~
[
121 +
= "
(10)
where
)(
ˆ
t
a
X
is the estimated state of the augmented
system state. From (8) and (9), we can obtain the
dynamic equation of state error expressed by
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
−
+
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
−
−
−
−
=
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
++
+
+
)(
0
0
0
~
~
~
~
000
100
010
001
~
~
~
~
1
2
1
1
1
2
2
1
1
2
1
ta
x
x
x
x
kL
kL
kL
Lk
x
x
x
x
n
n
n
n
n
n
n
n
#
#
"
"
##
"
"
#
(11)
or
)()(
~
)(
~
ttt
aa
FXAX +=
(12)
Wher
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
−
−
−
−
=
+
+
000
100
010
001
1
1
2
2
1
"
"
##
"
"
n
n
n
n
kL
kL
kL
Lk
A
and
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
−
=
)(
0
0
0
)(
ta
t
#
F
.
From the equation
0|| =− AIs
, it yields that the
characteristic equation of matrix
A
is given by
0
1
11
2
2
1
1
=+++++
+
+−+
n
n
n
nnnn
kLskLskLsLks "
(13)
Both sides of (13) are divided by
1+n
L
, then we have
0
1
11
2
)1(
1
1)1(
=+++++
+
−−−−−++−
nn
nnnnnn
kskLskLskLsL "
(14)
Define a variable as
sLs
1
1
−
=
(15)
From (15), Eq. (14) can be further represented as
0
11
1
1211
1
1
=+++++
+
−+
nn
nnn
ksksksks "
(16)
To yield that all the zero locations of (16) lie on
the left-hand plane of
1
s
plane, constants
121
,,,
+n
kkk "
can be given appropriately by using the
pole assignment method. Setting suitable values
121
,,,
+n
kkk "
implies that all the eigenvalues of
matrix
A
lie on the left-hand plane of
s
plane.
Because all the eigenvalues of matrix
A
lie on the
left-hand plane of
s
plane, it can be concluded that
the error dynamic system in (12) is asymptotically
stable. The solution of (12) is obtained as follows:
ττ
τ
deet
t
t
a
t
a
)()0(
~
)(
~
0
)(
FXX
AA
∫
−
+=
(17)
Without loss of generality, we can set
0)0(
~
=
a
X
in the design process. Hence, it yields from Eq. (17)
and Assumption 2 that
ττ
τ
det
t
t
a
)()(
~
0
)(
FX
A
∫
−
=
(18)
and
3
0
)(
)()(
~
cdet
t
t
a
<=
∫
−
ττ
τ
FX
A
where
3
c
is a positive constant. To design a sliding
mode controller, a sliding function formed in the
space of state error can be defined as
)()( ttS ΓE
=
(19)
where
]1[
121 −
=
n
γ
γ
γ
"Γ
is a constant vector.
While an appropriate control law is applied and the
sliding mode is occurred in finite time, the error
dynamics in the sliding mode can be defined by
0
1111
=
+
+
+
−−
eee
nnn
γ
γ
"
(20)
In (19), positive constants
121
,,,
−n
γ
γ
γ
"
should
be chosen such that
1
1
1
1 −
−
=
−
∑
+
i
n
i
i
n
λγλ
is a Hurwitz
polynomial.
Because the system state is not available, the
sliding function cannot be constructed by the system
state. In this paper, a so-called almost sliding
function is given as
)(
ˆ
)(
ˆ
ttS EΓ=
)]()(
ˆ
[ tt
d
XXΓ −=
(21)
where
T
n
txtxtxt )](
ˆ
)(
ˆ
)(
ˆ
[)(
ˆ
21
"=X
.
Then, we have
SSSS +−=
ˆˆ
Seeee
ii
n
i
inn
+−+−=
∑
−
=
)
ˆ
()
ˆ
(
1
1
γ
St
a
+= )(
~
XΛ
(22)
OBSERVER-BASED ADAPTIVE SLIDING MODE CONTROL FOR UNCERTAIN SYSTEMS WITH DEAD-ZONE
INPUT
319

where
]01[
121 −
=
n
γ
γ
γ
"Λ
.
Substituting (18) into (22), it yields that
SdeS
t
t
+=
∫
−
0
)(
)(
ˆ
ττ
τ
FΛ
A
(23)
From (23), the derivative of function
S
ˆ
with respect
to time is given by
SdeS
t
t
++=
∫
−
ΛFFΛA
A
0
)(
)(
ˆ
ττ
τ
(24)
Then, from (23) we can obtain
SSSdeS
t
t
ˆˆ
)(
ˆ
0
)(
+−++=
∫
−
ΛFFΛA
A
ττ
τ
∑∑
∫
−
=
−
=
−
−++++=
1
1
1
1
0
)(
)
ˆ
(
ˆ
)(
n
i
iii
n
i
iin
t
t
xxeede
γγττ
τ
ΛFFΛA
A
∑∑
∫
−
=
+
−
=
−
−+++=
1
1
1
1
1
0
)(
~
ˆ
)(
n
i
ii
n
i
iin
t
t
xeede
γγττ
τ
ΛFFΛA
A
∑
−
=
+
1
1
1
~
n
i
i
i
i
xkg
γ
(25)
Define a constant and a constant vector, respectively
as
∑
−
=
=
1
1
n
i
i
i
i
kgc
γ
4
(26)
]0[
1141 −
−−=
n
c
γ
γ
"Γ
(27)
Then, from (26) and (27), (25) can be represented by
a
n
i
iin
t
t
eedeS XΓΛFFΛA
A
~
ˆ
)(
ˆ
1
1
1
0
)(
++++=
∑
∫
−
=
−
γττ
τ
(28)
It follows that from (18)
ΛFFΓFΛA
AA
++=
∫∫
−−
ττττ
ττ
dedeS
t
t
t
t
)()(
ˆ
0
)(
1
0
)(
∑
−
=
++
1
1
ˆ
n
i
iin
ee
γ
ΛFFΓFΛA
AA
++=
∫∫
−−
ττττ
ττ
dede
t
t
t
t
)()(
0
)(
1
0
)(
∑
−
=
+−+++
1
1
ˆ
n
i
iidn
exdwf
γ
(29)
Suppose that
0)(
0
)(
=
∫
−
t
t
de
ττ
τ
F
A
and
0=ΛF
, a so-
called equivalent nonlinear input
)(tw
e
can be
obtained from
0
ˆ
=S
in (29)
)(
ˆ
)(
1
1
dfxetw
dn
n
i
iie
+−+−=
∑
−
=
γ
(30)
In addition the equivalent nonlinear input, for
approaching the sliding surface, a switching
nonlinear input is given as
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−−=
ε
η
S
satSktw
ds
ˆ
ˆ
)(
(31)
where
d
k
and
η
are two design positive constants,
ε
is a sufficient small positive constant, and
)(
⋅
sat
is a
saturation function, which is represented by
⎪
⎪
⎪
⎩
⎪
⎪
⎪
⎨
⎧
−≤−
<<−
≥
=
1
ˆ
,1
1
ˆ
1,
ˆ
1
ˆ
1
)
ˆ
(
ε
εε
ε
ε
s
if
s
if
s
s
if
s
sat
,
Hence, the ideal nonlinear input can be obtained
in the following form.
)()()( twtwtw
sedi
+
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−−+−+−=
∑
−
=
ε
ηγ
S
satSkdfxe
ddn
n
i
ii
ˆ
ˆ
)(
ˆ
1
1
(32)
In (32), since
f
and
d
are two unknown
functions, we can not obtain the ideal nonlinear
input in the practical control. From (1), the above
input can be expressed as
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−−−−+−=
∑
−
=
ε
ηγ
S
satSkwxxetw
d
n
dn
n
i
iidi
ˆ
ˆ
)(
ˆ
)(
)(
1
1
(33)
Then, it yields that the desired nonlinear input can
be designed in the following form
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−−+−+−=
+
−
=
∑
ε
ηγ
S
satSkwxxetw
ddndn
n
i
iid
ˆ
ˆ
ˆˆˆ
)(
1
1
1
(34)
where
1
ˆ
+n
x
is the estimated value of
)(n
x
, which is
obtained from the extension state observer and
d
w
ˆ
is
a filtered signal, which is given by
ddd
www
δδ
+−=
ˆˆ
(35)
where
δ
is a design positive constant. Hence, the
following result can be achieved.
www
dd
t
=
=
∞→∞→
ˆ
limlim
δ
Because the considered system contains an
unknown dead zone in this paper, an adaptive dead
zone inverse is proposed. The objective of the dead
zone inverse is to cancel the dead zone so that
)()( twtw
d
=
for any
)(tw
d
which is the desired
nonlinear input to the system. If dead zone
parameters
rlrl
mmbb ,,,
are known, we can
cancel the dead-zone effect. Mathematically, the
relation between
)(tu
and
)(tw
d
, which specifies the
dead zone inverse, is defined as follows:
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
320

⎪
⎪
⎩
⎪
⎪
⎨
⎧
<
+
=
>
+
=
0)(
0)(0
0)(
)(
twif,
m
bmw
twif,
twif,
m
bmw
tu
d
l
lld
d
d
r
rrd
(36)
Define some constant vectors as
[]
lr
nnN =
,
[]
T
lr
mmM =
,
[][]
TT
llrr
bmbmθ
21
θθ
==
where
⎩
⎨
⎧
>
=
otherwise,
wif,
n
d
r
0
01
and
⎩
⎨
⎧
<
=
otherwise
wif
n
d
l
,0
0,1
.
Then, (36) can be represented by
)(
1
)(
θ
Nw
N
M
tu
d
+=
(37)
While we use the above dead zone inverse, it has
a problem that the parameters
rlrl
mmbb ,,,
are
unknown. In this section, the adaptive dead zone
inverse based on the estimates to produce the control
input is represented in the following form.
⎪
⎪
⎩
⎪
⎪
⎨
⎧
<
+
=
>
+
=
0)(
ˆ
0)(0
0)(
ˆ
)(
twif,
m
bmw
twif,
twif,
m
bmw
tu
d
l
lld
d
d
r
rrd
)
ˆ
(
ˆ
1
θ
Nw
MN
d
+=
(38)
where
[]
T
lr
mmM
ˆˆ
ˆ
=
and
T
θθθ ]
ˆˆ
[
ˆ
21
=
are the
estimates of
M
and
θ
, respectively. Define
parameter error, slope ratio, and estimated slope
ratio, respectively as
[][]
TT
ˆ
~
llrrllrr
bmbmbmbm −=−=
θθθ
(39)
[] []
T
T
T
11=
⎥
⎦
⎤
⎢
⎣
⎡
==
l
l
r
r
lr
m
m
m
m
φφφ
(40)
[]
T
T
ˆˆ
ˆˆˆ
⎥
⎦
⎤
⎢
⎣
⎡
==
l
l
r
r
lr
m
m
m
m
φφφ
(41)
Then, we have the estimate error of the slope ratio as
[]
T
lr
φφφφφ
~
~
ˆ
~
=−=
(42)
Define a function as
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⋅−=
ε
ε
ε
S
satSS
ˆ
ˆ
(43)
The adaptation laws are given by
T
NS
ε
αθ
−=
ˆ
(44)
)(
T
θβφ
ε
ˆˆ
NwNS
d
+−=
(45)
njnjnj
mm
,,1,
ˆ
ˆ
ˆ
φ
=
+
,
lrj ,=
(46)
where
α
and
β
are positive constants to determine
the adaptation rate. Since
)()( twtw
d
=
, we have
θ
NNMuw
−
=
(47)
Then, from (29) and (47), it yields that
ΛFFΓFΛA
AA
++=
∫∫
−−
ττττ
ττ
dedeS
t
t
t
t
)()(
ˆ
0
)(
1
0
)(
∑
−
=
+−+−++
1
1
ˆ
n
i
iidn
exdNNMuf
γθ
(48)
Substituting (38) into (48), it is obtained that
fdedeS
t
t
t
t
+++=
∫∫
−−
ΛFFΓFΛA
AA
ττττ
ττ
)()(
ˆ
0
)(
1
0
)(
∑
−
=
+−+−++
1
1
ˆ
)
ˆ
(
ˆ
n
i
iidnd
exdNNw
MN
NM
γθθ
fdede
t
t
t
t
+++=
∫∫
−−
ΛFFΓFΛA
AA
ττττ
ττ
)()(
0
)(
1
0
)(
∑
−
=
+−+−+++
1
1
ˆ
)
ˆ
)(
~
1(
n
i
iidnd
exdNNwN
γθθφ
fdede
t
t
t
t
+++=
∫∫
−−
ΛFFΓFΛA
AA
ττττ
ττ
)()(
0
)(
1
0
)(
dN
S
satSkwx
ddn
++
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−−+−
+
θ
ε
η
~
ˆ
ˆ
ˆˆ
1
)
ˆ
(
~
θφ
NwN
d
++
(49)
4 STABILITY ANALYSIS
Consider a Lyapunov function candidate as
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
++=
φφ
β
θθ
α
ε
~~
1
~~
1
2
1
2 TT
SV
(50)
Then, the time derivative of function
V
is given by
φφ
β
θθ
α
εε
~~
1
~~
1
TT
SSV
++=
1. As
ε
<|
ˆ
| S
, from (43), we have
0=
ε
S
. It follows
that
0=V
.
2. As
ε
≥|
ˆ
| S
, from (43), we have
SS
ˆ
=
ε
.
From (44), (45), and (49), it is obtained that
⎢
⎣
⎡
++=
∫∫
−−
ΛFFΓFΛA
AA
ττττ
ττ
ε
dedeSV
t
t
t
t
)()(
0
)(
1
0
)(
︿
OBSERVER-BASED ADAPTIVE SLIDING MODE CONTROL FOR UNCERTAIN SYSTEMS WITH DEAD-ZONE
INPUT
321

⎥
⎥
⎦
⎤
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−−+−+
+
ε
η
S
satSkwxf
ddn
ˆ
ˆ
ˆˆ
1
[
]
2
1123
ˆˆ
ndd d
VSfdx wk kS
ε
ε
εηη η η
+
≤+−+−−+++−
(51)
where
1
η
,
2
η
, and
3
η
are three given positive
constants such that
1
ηττ
τ
≤
∫
−
t
t
de
0
)(
)(FΛA
A
,
2
ηττ
τ
≤
∫
−
de
t
t
)(
0
)(
1
FΓ
A
, and
3
η
≤ΛF
.
According to the design in (9), (34), and (35), it can
be obtained that
1
ˆ
lim)
ˆ
(lim
+
∞→∞→
=++
n
t
d
t
xwdf
and
8751
|||
ˆˆ
|
6
ccecxwdf
tc
nd
=+≤−++
−
+
(52)
From (51) and (52), we obtain
[]
2
3218
εε
ηηηηε
SkkcSV
dd
−+++−−≤
(53)
where
5
c
,
6
c
,
7
c
, and
8
c
are given positive constants.
When design parameters
d
k
,
η
, and
ε
in (31) are
chosen and satisfy the following condition.
η
ε
η
η
η
+
≤
+++
d
kc
8321
(54)
From (53) and (54), it yield that
0
2
≤−≤
ε
SkV
d
(55)
From the above analysis, it can be concluded
that
0≤V
for all time. Therefore,
V
is an non-
increasing function so that
ε
S
,
θ
ˆ
, and
φ
ˆ
are
bounded, i.e.
ε
S
,
θ
ˆ
, and
∞
∈ L
φ
ˆ
. From (55), we have
∞≤≤−≤
∫
)0()()0()(
2
VtVVdttSk
t
d
0
ε
The above inequality means
2
LS ∈
ε
. Since
SS
ˆ
=
ε
, from (48), it follows that
∞
∈ LS
ε
.
According to Barbalat Lemma, it is concluded that
0)(lim =
∞→
tS
t
ε
, and then it yields from (43) that
)(
ˆ
tS
is
a bounded signal and within bounded by
ε
<|| )(
ˆ
tS
for all
1
tt >
,
0
1
>t
.
The above inequality means that
)(
ˆ
tX
can
asymptotically follow reference signal
)(tX
d
and
also implies that system state
)(tX
can
asymptotically follow reference signal
)(tX
d
by
using extension state observer.
5 CONCLUSIONS
Without the requiqement of available system state,
the main contribution of this paper is to develop an
observer-based adaptive sliding mode control
scheme to achieve the tracking control objective for
an uncertain system which is
preceded by an unknown
dead-zone
and subject to unknown system nonlinear
function and external disturbance. In this paper, it is
proved that the proposed control scheme can ensure
global stability of the controlled system and can
achieve the tracking control objective satisfactorily.
ACKNOWLEDGEMENTS
The authors would like to acknowledge the financial
support from The Ministry of Economic Affairs,
Taiwan, Republic of China for this work, under
Grant 99-EC-17-A-08-S1- 142.
REFERENCES
Liu, Y. J., Zhou, N., 2010. Observer-based adaptive fuzzy-
neural control for a class of uncertain nonlinear
systems with unknown dead-zone input. ISA Trans.,
Vol. 49, pp. 462-469.
Ma, H. J., Yang, G. H., 2010. Adaptive output control of
uncertain nonlinear systems with non-symmetric dead-
zone input. Automatica, Vol. 46, pp. 413-420.
Selmic, R. R., Lewis, F. L., 2000. Dead-zone
compensation in motion control systems using neural
networks. IEEE Trans. Autom. Control, Vol. 45, pp.
602-613.
Tao, G., Kokotovic, P. V., 1994. Adaptive control of
plants with unknown dead-zone. IEEE Trans. Autom.
Control, Vol. 39, pp. 59-69.
Tao, G., Kokotovic, P. V., 1995. Discrete-time adaptive
control of systems with unknown dead-zone. Int. J.
Control, Vol. 6, pp. 1-17.
Wang, X. S., Su, C. Y., Hong, H., 2004. Robust adaptive
control of a class of nonlinear system with dead-zone.
Automatica, Vol. 40, pp. 407-413.
Zhang, T. Z., Ge, S. S., 2007. Adaptive neural control of
MIMO nonlinear state time-varying delay systems
with unknown dead-zone and gain signs. Automatica,
Vol. 43, pp. 1021-1033.
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
322
