
AN IMPROVED GENETIC ALGORITHM WITH GENE VALUE
REPRESENTATION AND SHORT TERM MEMORY FOR
SHAPE ASSIGNMENT PROBLEM
Ismadi Md Badarudin
Faculty of Computer and Mathematical Sciences, Universiti Teknologi MARA, Shah Alam, Selangor, Malaysia
Abu Bakar Md Sultan, Md Nasir Sulaiman, Ali Mamat
Faculty of Computer Science and Information Technology, Universiti Putra Malaysia, Serdang, Selangor, Malaysia
Mahmud Tengku Muda Mohamed
Faculty of Crop Science, Universiti Putra Malaysia, Serdang, Selangor, Malaysia
Keywords: Genetic algorithm, Specific-domain initialization, Short term memory, Shape assignment.
Abstract: The purpose in shape assignment is to find the optimal solution that combines a number of shapes with
attention to full use of area. To achieve this, an analysis needs to be done several times because of the
different solutions produce dissimilar number of items. Although to find the optimal solution is a certainty,
the ambiguity matters and huge possible solutions require an intelligent approach to be applied. Genetic
Algorithm (GA) was chosen to overcome this problem. We found that basic implementation of Genetic
Algorithm produces uncertainty time and most probably contribute the longer processing time with several
reasons. Thus, in order to reduce time in analysis process, we improved the Genetic Algorithm by focusing
on 1) specific-domain initialization that gene values are based on the X and Y of area coordinate 2) the use
of short term memory to avoid the revisit solutions occur. Through a series of experiment, the repetition of
time towards obtaining the optimal result using basic GA (BGA) and improved GA (IGA) gradually
increase when size of area of combined shapes raise. Using the same datasets, however, the BGA shows
more repetition number than IGA indicates that IGA spent less computation time.
1 INTRODUCTION
Genetic algorithm (GA) is an alternative method of
solving many design problems which are considered
as ambiguous problems and / or consists of the huge
possible solutions. The initial step is to represent a
legal solution to the problem to be solved by a string
of genes that can take on some value from a
specified finite range or alphabet. This string of
genes, which represents a solution, is known as a
chromosome. Each chromosome represents a legal
solution to the problem and is composed of a string
of genes. The binary alphabet {0, 1} is often used to
represent these genes but sometimes, depending on
the application, integers or real numbers are also
used. In fact, almost any representation can be used
that enables a solution to be encoded as a finite
length string.
The GA’s chromosome consists of groups of
variables, which are represented by groups of genes.
The initialization of these genes significantly affects
the GA’s performance, and an improper choice for
the chromosome structure will often result in poor
performance. The good representation of a
chromosome explains the power of the GA search
because they improve its efficiency and
effectiveness. The better a chromosome contribute,
the more of its genes will be preserved for the next
generation (Chen-Fang Tsai and Kuo-Ming Chao,
2007). The good coding for a chromosome
representation will ensure reduce the possible
number of proposed solutions to be analyzed.
According to Schaffer (1985) the short defining of
178
Md Badarudin I., Md Sultan A., Sulaiman M., Mamat A. and Tengku Muda Mohamed M..
AN IMPROVED GENETIC ALGORITHM WITH GENE VALUE REPRESENTATION AND SHORT TERM MEMORY FOR SHAPE ASSIGNMENT
PROBLEM.
DOI: 10.5220/0003493601780183
In Proceedings of the 13th International Conference on Enterprise Information Systems (ICEIS-2011), pages 178-183
ISBN: 978-989-8425-54-6
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
chromosome length consisting of bits which work
well together, and lead to improved performance
when incorporated into a chromosome.
The reasons using GA because of the
metaheuristic properties that are applied in GA to
reach the optimal result in term of time and quality
are better (Goldberg, 1989; Miihlenbein and
Schlierkamp, 1993; Srinivas and Patnaik, 1994).
With some properties of metaheuristic are
implemented by GA promise better solution;
however certain situations might need an
improvement of GA with several strategies to yield
an efficient time.
One of the nine metaheuristic properties is
strategies to guide the search process. Many of the
metaheuristic approaches rely on probabilistic
decision made during the search. But, the main
difference to pure random search is that in
metaheuristic algorithms randomness is not used
blindly but in an intelligent, biased form (Stutzle,
1999). Such strategy allows generating new starting
solutions for the local search in more an intelligent
way rather than just providing random initial
solutions. In the evolutionary computational field
(Eiben and Schippers, 1998), the process of
exploration and exploitation often refer to short term
strategy tied to randomness. According to Blum and
Roli (2003), a short term memory to escape from
local minima and to avoid cycles, this property is
often applied in simple tabu search. In addition, the
different approaches to other methods to solve
trajectory optimisation by applying the random
value with evolutionary strategy that has global
search capability and the robust characteristics (Rae-
Dong Kim et al., 2007). Nevertheless, their
efficiency has recently been criticized because the
repetition number in GA influences the length of
computation time in analysis process.
This paper focuses on the strategies of specific-
domain initialization rather in assigning value of
genes and to avoid revisit solution occurs. We divide
this paper to 5 sections. The reminder of this paper is
organized as follows, in section 2 is the overview of
application problem to be settled with the
constraints. In section 3 devotes to discussion of the
two improvement strategies that were applied in
basic GA (BGA) named by improved GA (IGA). In
chapter 4 reveals the results based on analysis of
generating solutions and followed by discussion on
the results. Finally in section 5, we discuss the
conclusion of this paper.
2 OVERVIEW OF SHAPE
ASSIGNMENT PROBLEM
Shape assignment purpose is to combine the several
of shapes to be assigned into a determined area. The
objective is to fully utilize the area, on the other
words to produce zero unused space as shown in
figure 1. The existence of many shapes can be
assigned into area therefore, possible solutions to be
analyzed will be huge. The analysis process has to
be done because of every solution produces different
number of items. Detail discussion of shape
assignment problem can be referred at previous
paper (Ismadi et al., 2010).
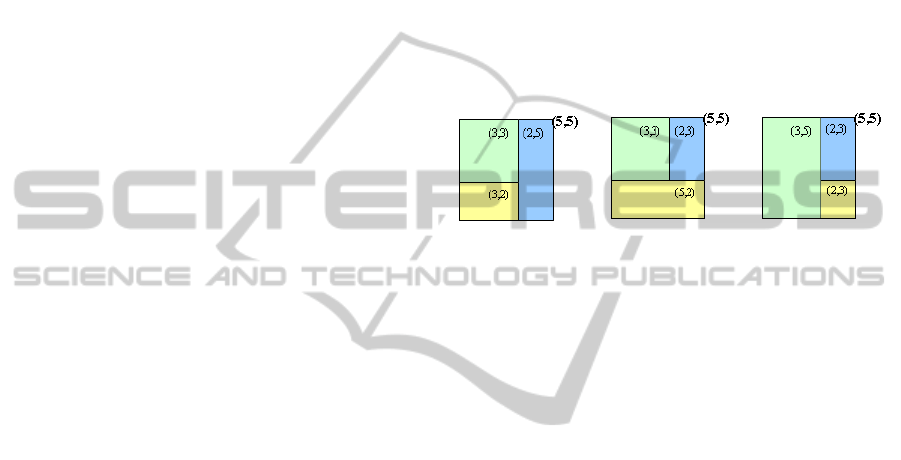
Figure 1: The three optimal solutions of (5,5) area
coordinate
The same size of shape but different coordinate
for instance (2,5) and (5,2) produce different number
of items. Thus, the item calculation of combined
shapes for every solution needs to be done. The
maximum number of item is considered the best, so
that the process of assigning shapes into an area will
require a repetitive analysis. However, the existence
of expected item number in the combined shapes is a
wasted time to be analyzed. For instance, the first
optimal solution as shown in figure 1 consists of the
combined shapes that are represented by
chromosome of 3, 3, 3, 2, 2, 5 of the 5, 5 area
coordinate. This means the three combined shapes
contain the three sequences of 3, 3; 3, 2 and 2, 5
coordinates, respectively. By changing the order of
shapes, the combination of shapes can be 3,3; 2,5;
3,2 or 3,2; 3,3; 2,5 or 2,5; 3,3; 3,2 or … or 2,5; 3,2;
3, 3. These all combined shapes certainly produce
the same number of items. This situation should be
avoided by ignoring the unwanted coordinate
because it contributes to the increase of computation
time in analysis process.
3 GENETIC ALGORITHM (GA)
FOR SHAPE ASSIGNMENT
PROBLEM
Shape assignment problem is considered as space
allocation problem or packing problem in which
AN IMPROVED GENETIC ALGORITHM WITH GENE VALUE REPRESENTATION AND SHORT TERM
MEMORY FOR SHAPE ASSIGNMENT PROBLEM
179
both are non-deterministic polynomial (NP)
problems. Thus, an algorithmic intelligence
techniques are required, so that the enormous
decision arise can be answered in an acceptable
time. The enormous increase in the number of
decision has led to applying heuristic algorithms
such as genetic algorithm (Stewart et al., 2004).
An analysis of clustering rectangles problem by
Burke and Kendall (1999) showed the quality of the
Simulated Annealing and Tabu Search algorithms
better than the GA. However, another analysis in
different problem domains such as TSPs (Pham and
Karaboga, 2000), showed GA outperformed the
others. Thus, the inconsistency of the efficiency and
effectiveness of the algorithms give an indication
that GA has space for improvement.
GA was applied to overcome shape assignment
problem. However the huge iterations of analysis in
GA as discussed in section 3.1 requires high
computation time. Therefore, the two improvements
of GA are identified in this issue towards reducing
the number of iteration process and as a result
diminish computation time.
3.1 Basic GA (BGA)
The common works of GA that consists of
population initiation followed by the three operators
of selection, crossover and mutation. The GA is
typically able to solve some optimisations problems;
however the computation time is always
questionable. BGA refers to two situations as
discussed below:
First situation refers the use of random number
in assigning gene value. To find the number of
possible solutions to be analyzed subjects to the
number of shapes. With four shapes for example,
means it requires eight genes of chromosome. Each
gene is randomly assigned with value between 0 and
9 that is represented by X and Y coordinates
respectively. The possible solutions in the worst case
would be 100,000,000 (10
8
=
10
chromosomeLength
).
Second situation devotes the existence of same
value of sequence genes. The repetition of optimal
shape solutions need to be compared with the
purpose of finding the maximum number of item.
However, same value of sequence genes will
produce the same number of items and thus, the
process of finding the optimal solution is a wasted
time. According to Richard (2000), without
controlling this situation usually to be revaluated
consequently spends computational effort on
evaluating fitness function far exceeds that of
genetic operator.
3.2 Improved GA (IGA)
The two situations in BGA for this domain problem
therefore, we developed the two strategies with
intention to reduce iteration process in analysis
process and eventually the processing time will be
probably reduced.
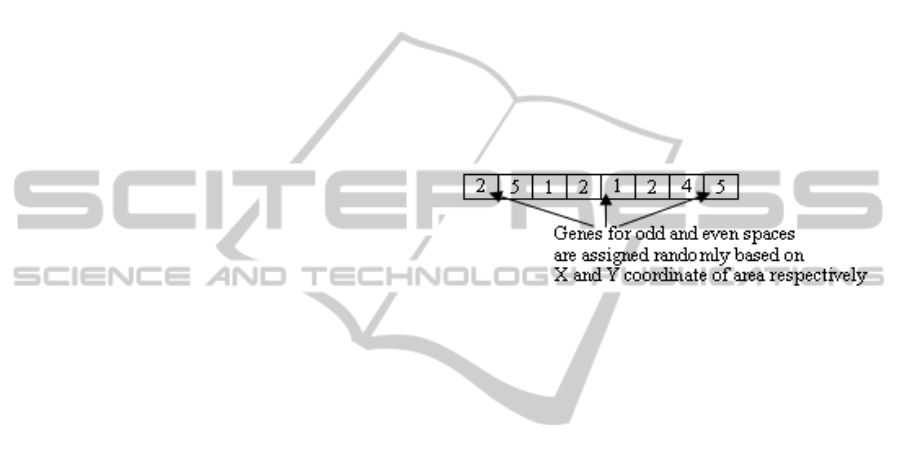
First strategy is to assign possible shapes into
the area randomly with specific-domain in
initialization process. This strategy focuses to
randomly assign the value of genes that are derived
from the X and Y coordinates of area as shown in
figure 2. For example, the X and Y of area coordinate
represent 4 and 5 respectively. Thus the odd spaces
of chromosome the number can be assigned is
between 1 and 4, similar to even spaces where the
number between 1 and 5 is allowed.
Figure 2: Chromosome by gene value that assigned
randomly.
The possible solutions are based on the formula
of (X areaCoordinate
chromosomeLength/2
* Y
areaCoordinate
chromosomeLength/2
). Thus, the number of
possible solutions by (4, 5) area coordinate
is160,000 (4
4
* 5
4
) in the worst case.
Second strategy, the optimal shape assignment
solution is not necessary the best solution as long as
it does not achieve the maximum number of items.
The process of obtaining the maximum item might
need to be done iteratively. Therefore, the same
optimal solution might occur. To avoid that, a
control in GA by short term memory approach was
employed. The short term memory is cleared at the
start of each new generation and so can only store
information about the current. The use of short term
memory is to check whether an individual is a
duplicate of one encountered earlier in the current
generation (Jason and Chris, 2003).
Some cases the use of priori knowledge is
applicable for feasible solution and protecting the
same chromosome to be frequently revaluated will
probably reduces the computation time. There are
two possible matters will occurs in generating
optimal solutions which are 1) the current result and
previous result is same 2) The block combination of
current and previous result is same but different
location place. These matters promote same number
of items.
ICEIS 2011 - 13th International Conference on Enterprise Information Systems
180
The creation of database is to collect all previous
successful optimal results. The optimal solution will
be compared with the available previous optimal
solution in database. The existence of same
combination of shapes will be rejected and
regenerate to another optimal solution, otherwise the
next process to calculate item and find the maximum
item will be implemented. This comparison process
is repeated until meeting a defined evaluation
number. This control is expected reduce time
because of a calculating of items for combined
shapes can be skipped when the existence of same
optimal between the current and previous solutions.
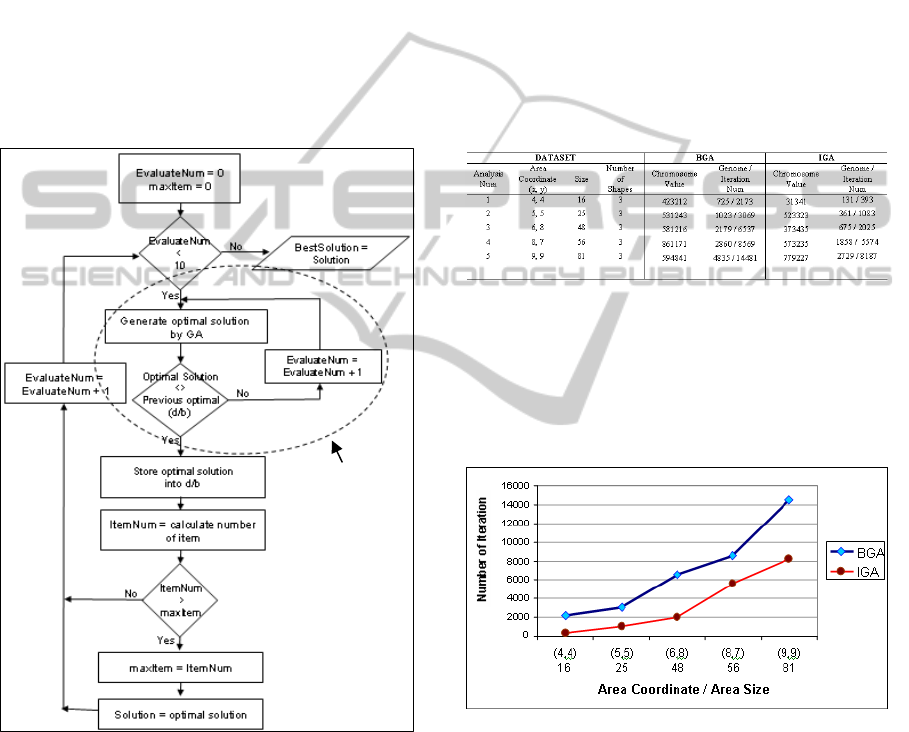
The flowchart in figure 3 shows the overall
processes of finding the best solution of shape
assignment.
Figure 3: Processes of finding the best shape assignment.
4 RESULT AND DISCUSSION
The three experiments with different datasets were
used for the comparisons between BGA and IGA in
terms of computation time usage. The purpose of the
first experiment is to find the number of
chromosome to find optimal solution and the
number of iteration. Second experiment focuses on
number of negative value and number of positive
value that both were generated by BGA and IGA.
The third experiment is to obtain the number of
repetition when the execution of short term memory.
4.1 Experiment 1: Iteration of Genome
to Produce the Successful Shape
Assignment
Table 1 shows the same dataset was used in BGA
and IGA. The chromosome value and gene iteration
of both BGA and IGA were stated.
Table 1: Different Area Coordinate, Same Number of
Shape.
The graph in figure 4 shows, both BGA and
IGA generated a consistent increase of iteration
number when the X and Y area coordinate raise.
However, the iteration number of BGA is higher
than IGA at all levels of the area coordinate;
therefore the computation time taken by IGA less
than BGA.
Figure 4: Iteration number of both BGA and IGA.
4.2 Experiment 2: Analysis of Positive
and Negative Value of Fitness
Status
The fitness status can be positive of negative value.
The positive is given when some hard constraints
have been fully fulfilled. While fail to do so the
negative value will be assigned. The below
procedure shows how the fitness status is given as
follow:
Control
Mechanism
AN IMPROVED GENETIC ALGORITHM WITH GENE VALUE REPRESENTATION AND SHORT TERM
MEMORY FOR SHAPE ASSIGNMENT PROBLEM
181
Area Size Æ areaX * areaY ---- (a)
Size of combined shape
Æ
N
∑
i=1
((shapeX)
i
* (shapeY)
i
)
---- (b)
if (b) <= (a)
fitness status = “positive”
Else if (b) > (a)
fitness status = “negative”
The positive values of chromosomes mean there
are tendencies to assign all combined shapes into an
area but the space is not necessarily fully utilized.
However, at the next generation, these chromosomes
have opportunity to reach optimal solution. Whereas
the negative value of chromosomes are stated when
a possibility of at least one of shapes fail to be
assigned into the area. These chromosomes will be
rejected for the next generation.
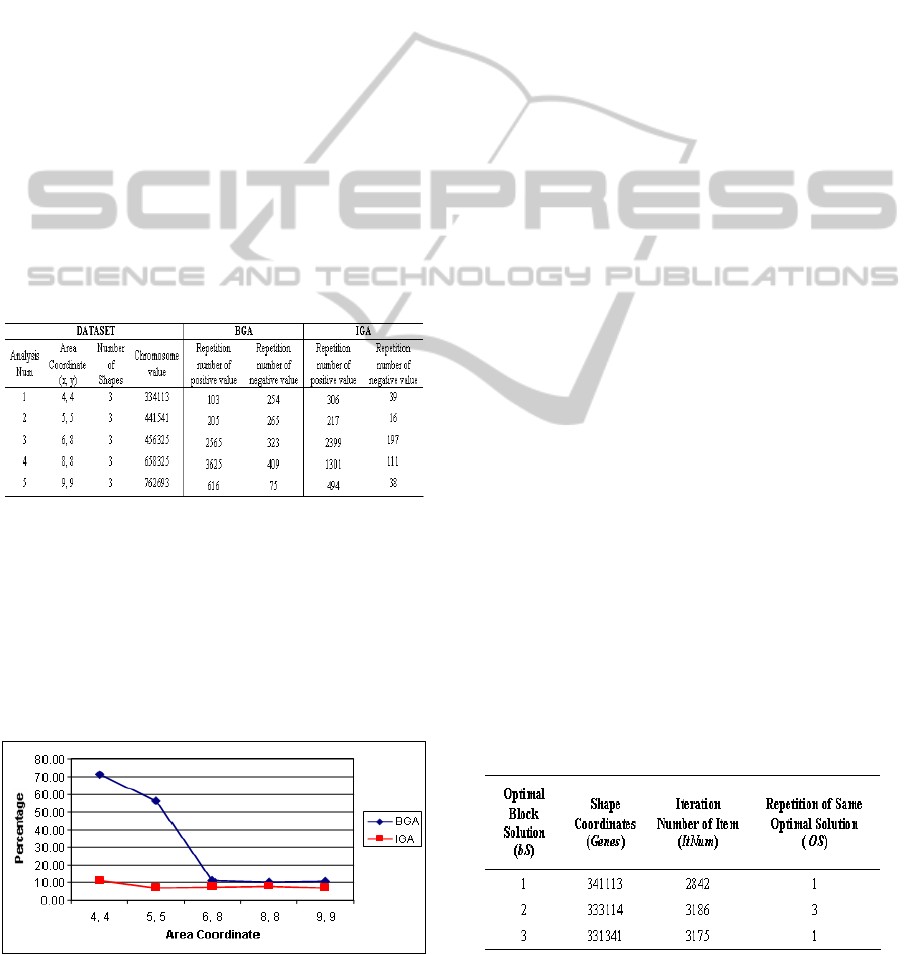
Table 2 shows the repetition number of positive
and negative value for both BGA and IGA using the
same dataset.
Table 2: Comparing possibility number of negative value
in BGA and IGA.
The result of negative and positive value of
both BGA and IGA were analyzed and the result is
illustrated by graph as shown in figure 5. At 4, 4
and 5, 5 areas coordinate of BGA produce 70 and 57
percent of negative values respectively, and then the
values tremendously plunge to 10 percent at the next
coordinate of areas. While IGA shows the negative
value of all areas is not much difference between 7
to 10 percent.
Figure 5: Percentage of repetition number of negative
value.
The 4, 4 and 5, 5 area coordinate of BGA
produced high percentage of negative value and it
give a justification of the 0 to 9 gene values
representation is not applicable. The higher gene
values than area coordinates produce more
unsatisfied conditions. We can conclude based on
the overall result that the BGA produces more
repetition number of negative value than IGA, so
that insignificant chromosomes lead to time increase
and affect to quality of result. Therefore, the
undefined specific initialization in BGA becomes
the possibility of chromosomes to violate the hard
constraints are higher. These insignificant
chromosomes have possibility to be used in
processes of crossover and mutation. Therefore use
of awful chromosome for producing new offspring
consequently gives more time to find the optimal
solution.
4.3 Experiment 3: Repetition Number
of Same Solution Optimal Solution
Basically, the larger area coordinates will produce
higher number of possible solutions. Refer to table
3, the area coordinates of analysis number 1 and 3
generated possible results with 4,096 (4
3
* 4
3
) and
110,592 (6
3
* 8
3
) respectively, as the result of
analysis number 3 required more analysis time.
Refer to experiment 3, there were three same
solutions as shown in table 3. As a comparison, by
BGA, the process of calculating tree number and
determining the best line-direction and required
15,575 (
bS=N
∑
bS=1
(ItNum * OS)
bS
) iterations, while IGA
required only 9203 (
bS=N
∑
bS=1
ItNum
bS
) iterations.
The overall time taken is based on the
accumulation of time in all repetition processes.
Small areas coordinates have higher tendency to
occurrence of the repetitive optimal shape solution.
The different computation time of both BGA and
Table 3: Analysis of the Same Optimal Shape Solution.
IGA increases consistently when more repetition
number of same optimal solution. However, when
ICEIS 2011 - 13th International Conference on Enterprise Information Systems
182

the evaluation number is small (refer to figure 3), the
possibility of repetition number might not happen,
thus computation time of both will be same.
From our observation the taken time for each
experiment was inconsistent at certain time but it
infrequently happen is a challenge. A justification on
this matter is a probabilistic algorithm with a
randomness strategy applied in GA, therefore the
number of repetitions and iterations and hardly
expected.
5 CONCLUSIONS
IGA possibly reduces number of repetition by
focussing on assigning values to genes and
controlling the repetition of optimal solution. The
gene value is based on an area coordinate will be
more significant when the area coordinate increases.
Besides that, the less number of negative values in
obtaining the optimal solution will reduce
computation time because of the awful
chromosomes will be diminished. Meanwhile,
controlling mechanism in obtaining the best optimal
reduce computation time by looking at the number
of iteration.
ACKNOWLEDGEMENTS
This research is registered in the Fundamental
Research Grant Scheme (FRGS) and it is fully
funded by Ministry of Higher Education (MOHE),
Malaysia. Authors express our highly appreciation
and thanks to MOHE, Malaysia and Universiti
Teknologi MARA, Malaysia for sponsoring one of
the authors in PhD level. Authors also wish to thank
the Universiti Putra Malaysia that provides facilities
and conducive environments for carrying out this
research.
REFERENCES
Blum, C., Roli, A., 2003. Metaheuristic in Combinatorial
Optimization: Overview and Conceptual Comparison,
ACM Computing Journal, 268-238.
Burke, E., Kendall, G. 1999. Comparison of Meta-
Heuristic Algorithm for Clustering Rectangle.
Computer and Industrial Engineering 37, 383-386.
Chen-Fang Tsai1, Kuo-Ming Chao, 2007. An Effective
Chromosome Representation for Optimising Product
Quality, Proceedings of the 2007 11th International
Conference on Computer Supported Cooperative
Work in Design, 1032-1037.
Eiben, A. E., Schippers, C. A., 1998. On Evolutionary
Exploration and Exploitation, Fund. Inf. 35, 1-16.
Ismadi, M. B., Abu Bakar, M.S., Md Nasir, S., Ali, M.,
Mahmud, T.M.M., 2010. Shape Assignment by
Genetic Algorithm towards Designing Optimal Areas,
International Journal of Computer Science Issues
IJCSI, Vol. 7, Issue 4, No 5, 1–7.
Goldberg, D.E., 1989. Genetic Algorithms in Search,
Optimization and Machine Learning. Addison-
Wesley, Reading, MA.
Jason, C., Chris, H., 2003. Improving Genetic Algorithms
Efficiency Using Intelligent Fitness Functions,
IEA/AIE 2003, LNAI 2718, pp. 636-643.
Miihlenbein, H., Schlierkamp, V.D., 1993. Predictive
Models for the Breeder Genetic Algorithm I.
Evolutionary Computation. 1( 1), 25-50.
Pham, D. T., Karaboga, D., 2000. Intelligent Optimisation
Techniques: Genetic Algorithm, Tabu Search,
Simulated Annealing and Neural Network, Springer-
Verlag.
Rae-Dong Kim, Ok-Chul Lung, Hyochoong Bang, 2007.
A Computational Approach to Reduce the Revisit
Time Using a Genetic Algorithm, International
Conference on Control, Automation and Systems
2007, Oct. 17-20, 2007 in COEX, Seoul, Korea, 184-
189.
Richard, J. P., 2000. Comparing Genetic Algorithms
Computational Performance Improvement Techniques,
Artificial Neural Networks in Engineering,
Proceedings, 305-310.
Schaffer, J. D., 1985. Learning Multiclass Pattern
Discrimination,, Proceedings of the First International
Conference on Genetic Algorithms, 74-79
Srinivas, M., Patnaik, L., 1994. Genetic Algorithms: A
Survey. Computer. IEEE Press, 17-26.
Stewart, T. J., Janssen, R. and Herwijnen, M. V. 2004. A
Genetic Algorithm Approach to Multiobjective
Landuse Planning, Computers & Operations Research
Journal, 2293-2313.
Stutzle, 1999. Local Search Algorithms for Combinatorial
Problem – Analysis, Algorithms and New
Applications. FISKI – Dissertationen zur Kunstliken
Intelligez. Infix, Sankt Augustin, Germany.
AN IMPROVED GENETIC ALGORITHM WITH GENE VALUE REPRESENTATION AND SHORT TERM
MEMORY FOR SHAPE ASSIGNMENT PROBLEM
183
