
EXPLORATION OF TECHNOLOGIES FOR AUTONOMIC
DEPENDABLE SERVICE PLATFORMS
Eila Ovaska
1
, Liliana Dobrica
2
, Anu Purhonen
1
and Marko Jaakola
1
1
VTT Technical Research Centre of Finland, Kaitoväylä 1, 90571, Oulu, Finland
2
University Politehnica of Bucharest, Splaiul Independentei 313, 060042, Bucharest, Romania
Keywords: Self-adaptive, Service architecture, Ontology, Dependability, Modeling.
Abstract: A city is smart if it can provide ambient services for citizens and especially for professionals who have to
tackle emergency situations, including small and wide scale accidents and incidents. These ambient services
embody intelligence of autonomic systems based on heterogeneous execution platforms enhanced with ser-
vices that provide mechanisms for self-adaptation of dependable applications. This paper explores enabling
technologies of autonomic dependable service platforms from three viewpoints: i) architectural options, ii)
ontology models for services, context and dependability, and iii) modeling methods and practices for
achieving high quality service platforms and intelligent applications. The main findings are summarized as a
set of research items that need to be carried out for achieving an autonomic dependable service platform.
1 INTRODUCTION
Besides situation based information, smart cities also
provide quality-critical services for their communi-
ties, i.e. high quality services for professionals such
as firemen, medical service providers, police, etc.
These workers are responsible for real-time reaction
in emergency situations. An emergency situation –
caused by an extensive accident - means that the
environment immediately changes, and therefore,
the type and amount of information required for de-
cision making and actions are also changing. These
changes affect on the use and availability of compu-
ting and communication resources and the applica-
tions and services they provide for problem solving.
Smart city environments heavily rely on a multi-
tude of sensor networks, embedded systems and
devices that produce a large amount of data to be
analyzed and reacted on in the short run by the secu-
rity and safety monitoring processes executed by
critical information systems. In this paper, we focus
on heterogeneous systems that embody large scale
sensor networks, embedded systems, mobile devices
and enterprise systems. On the one hand, sensors
interact with other nodes in various ways and com-
munication may be periodic or ad-hoc over wired
and/or wireless networks. Moreover, computers dif-
fer in their architecture and computing resources,
such as CPUs, operating systems, processing power,
amount of memory, energy
requirements, etc. For
example, motes that are tiny devices powered by a
battery and featuring low-power wireless communi-
cation capability bring challenges for application
developers. On the other hand, information systems
bring tight quality requirements, which are to be
fulfilled in any case, preventing human and econom-
ical damages, by reacting with adaptive and auto-
nomous behavior to changing situations and disap-
pearing resources.
The development of smart cities benefits from
the findings and experiences gained from worldwide
sensor webs (Balazinka et al., 2007) and service
oriented architectures, also applied to sensor webs
(Chu and Buyya, 2007). However, smart city appli-
cations require more; the platform shall be able to
adjust its behavior based on defined dependability
requirements, users’ goals, quality of services and
quality of available resources. Thus, this adaptation
requires intelligence that enables real-time identifi-
cation, reasoning and proactive reaction on alerts.
The objective of this paper is to explore the ex-
isting software technologies that are applicable for
developing a service platform that is able to make
autonomously the needed corrective and preventive
actions in abnormal situations, and thereby provide a
dependable infrastructure upon which adaptive ap-
plications can easily be developed and deployed. In
particular, we focus on how dependability of appli-
cations can be guaranteed in ad-hoc situations.
115
Ovaska E., Dobrica L., Purhonen A. and Jaakola M..
EXPLORATION OF TECHNOLOGIES FOR AUTONOMIC DEPENDABLE SERVICE PLATFORMS.
DOI: 10.5220/0003497301150124
In Proceedings of the 6th International Conference on Software and Database Technologies (ICSOFT-2011), pages 115-124
ISBN: 978-989-8425-76-8
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
The main contributions of this paper are 1) the
options of adaptive service architectures for auto-
nomic dependable service platform, 2) the inventory
of potential ontologies that could be exploited in the
development of a dependable service platform, and
3) the approaches applicable in the development of
quality critical and situation based smart city appli-
cations. In summary, self-adaptation is based on
context-awareness, realized as situation based beha-
vior that takes into account the functional and quali-
ty properties of the environment and system itself,
and the needs of system’s users.
The structure of the paper is as follows. Section 2
explains the concept of an autonomic dependable
service platform. Section 3 explores existing adap-
tive service architectures and platforms. Section 4
introduces a selected set of ontologies for
representing services, context and dependability.
Section 5 discusses modeling methods and tech-
niques applicable for modeling context and depen-
dability. Section 6 summarizes our findings, and
conclusion closes the paper.
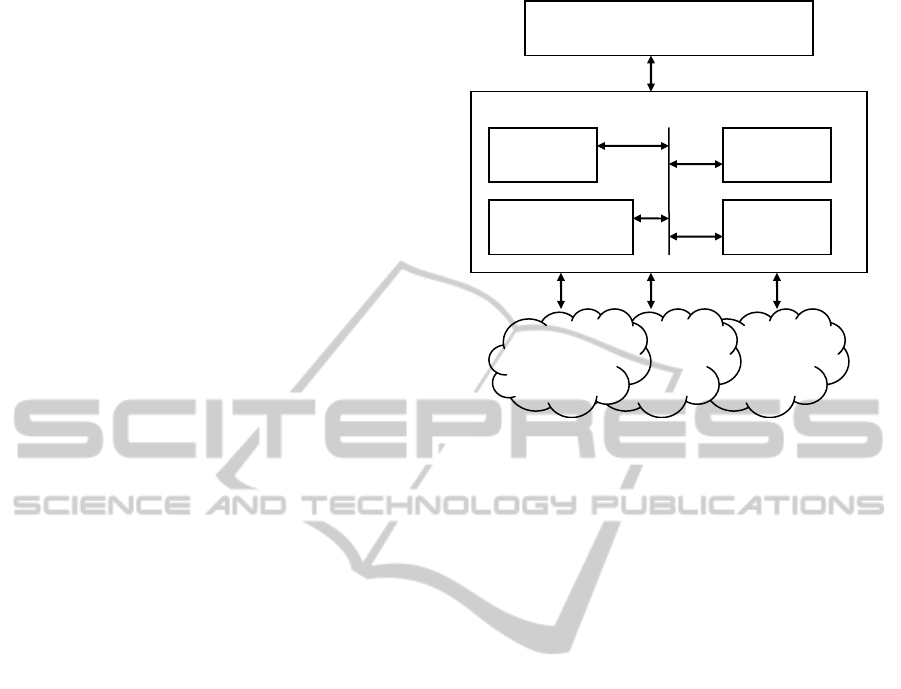
2 THE CONCEPT
The increasing amount of cheap multi-purpose sen-
sors enables enhancing applications with intelligence
that adapts their behavior reactively and proactively
(Figure 1). Sensor data gathered from the physical
environment is clustered and merged with the sys-
tem’s internal state to define the application context.
Thereafter, an application adapts its behavior based
on the context, the quality of used services and
available resources. Even though applications are
founded on self-adaptive platform services, depend-
able applications require even more; the physical
environment is also to be reorganized. Due to high
cost of manual reorganization, sensor networks
ought to be self-organizing wireless networks.
An autonomic dependable service platform is a
key enabler of dependable smart city applications
with situation based behavior and ability to exploit
and tolerate the evolution of environment, technolo-
gy and application fields.
Therefore, the following technologies embody a
great potential for autonomic service platforms:
• Service oriented architectures are applied to in-
formation systems, embedded systems, mobile
devices and sensor networks. Thus, self-
adaptation based on service orientation would be
a widely exploitable cross-domain solution.
• Ontologies are used for sharing domain know-
ledge among application and platform
Wireless
Sensor
Networks
Wireless
Sensor
Networks
Reactive and proactive applications
Autonomic Dependable Service Platform
Self-adaptive
Services
Network
Self-organisation
Context
management
QoS
management
Wireless
Sensor
Networks
Environment
Figure 1: Overview of an autonomic dependable service
platform.
developers. Moreover, ontology orientation is
exploited for developing reusable assets and
managing the evolution of systems and their ap-
plications.
• Quality of service management is the mandatory
requirement because of the purpose of the plat-
form: to execute dependable applications on top
of an autonomic service platform.
• Model driven development helps in sharing
knowledge, information and artifacts in an unam-
biguous way, understood by both people and ma-
chines. Thus, models play an important role at
design time and at run time.
3 SELF-ADAPTATION
TECHNOLOGIES
3.1 Self-*ilities of Autonomic Systems
An autonomic system has six characteristics (Salehie
and Tahvildari, 2009) also called self-*ilities:
• Reflexivity. The system must have knowledge of
its capabilities, boundaries and interdependen-
cies, and be aware of its possible configurations
and their impact on particular quality require-
ments.
• Self-configuring. The system provides increased
responsiveness by adapting to dynamic changes
occurred internal of the system or in the external
operating environment.
ICSOFT 2011 - 6th International Conference on Software and Data Technologies
116

• Self-optimizing. The system provides operational
efficiency by tuning resources and balancing
workload.
• Self-healing. The system provides resiliency by
discovering and preventing disruptions as well as
recovering from malfunctions.
• Self-protecting. The system secures its assets by
anticipating, detecting and protecting against at-
tacks.
• Adapting. The core of the system is a control
loop - sensing, decision making, and acting. The
adaptive mechanisms are typically inspired by
work on machine learning, multi-agent systems,
and control theory.
Adaptive service platforms most often support self-
configuring or self-optimization (Nahrstedt et al.,
2001); (Zeng et al., 2004). However, recently self-
healing has started to receive more attention (Baresi
et al., 2008) (Cardellini et al., 2009c). As the system
is autonomic in its ‘normal’ operation, it should be
able to survive failures and to adjust system’s cha-
racteristics to altering loads and resources autono-
mously (Botts et al., 2008).
3.2 Adaptive Middleware Architecture
The quality management in service-oriented systems
requires additional features of the service brokering.
QoS Broker utilizes a centralized approach where
requests from clients are handled by a QoS-aware
broker that evaluates each request using a perfor-
mance model (Menasce and Dubey, 2007). In a
quality assurance framework the brokers are created
on-demand and all the service providers and con-
sumers can have their own brokers (Robinson et al.,
2008). AgFlow has a separate service composition
manager that forms a composite service from proper
sub-services, requested from the service broker
(Zeng et al., 2004).
When quality management is added to the sys-
tem it may cause that all the services are required to
be changed to support the new middleware. VO-
LARE (Papakos et al., 2009) adds an adaptation
middleware between Web services and the broker
module that monitors the resources and context of a
device, and adapts service requests accordingly. It
also adapts the QoS levels advertised by service
providers, to realistically reflect each provider’s ca-
pabilities at any given moment. The adapted service
descriptions and advertisements are syntactically
identical to un-adapted versions, allowing interope-
rability with non-VOLARE nodes.
In the ubiquitous environments the time spent for
quality management is critical. Consequently, the
quality-aware service discovery can be divided into
two levels (Cardellini et al., 2009a). First, the ser-
vice provisioning level identifies the actual pool of
concrete services that will be used to implement the
component functionalities so that the user’s end-to-
end requirements are fulfilled and the service bro-
ker’s utility function is maximized. At the second
phase, the role of the service selection level is to
determine, from the pool identified by the service
provisioning, the actual concrete services which are
bound to each incoming user request. The service
provisioning can operate at a slower pace than the
service selection.
MUSIC platform (Rouvoy et al., 2009) supports
self-adaptation in ubiquitous and service-oriented
environments. It provides an adaptation planning
framework for managing the frequent and unex-
pected changes in the execution context of mobile
applications. The purpose of the adaptation planning
framework is to evaluate the utility of alternative
configurations in response to context changes, to
select a feasible one for the current context and to
adapt the application accordingly.
The control loop of quality management can be
roughly decomposed into monitoring, analyzing,
planning and execution (Kephart and Chess, 2003).
Monitoring means collecting the data needed for
QoS adaptation from the system under interest. For
example, in (Robinson et al., 2008) monitors are
created at runtime to transparently intercept requests
and responses between consumers and providers.
Analyzing is the phase, where the collected data is
combined to form proper QoS metrics, and possibly
also predictions of future states are made. Predic-
tions are used for finding out quality violations
proactively (Robinson et al., 2008); (Papakos et al.,
2009). Planning is the control phase, where the re-
quired action is selected. Planning can be an aggre-
gate of local and global level reasoning, (Mokhtar et
al., 2007). Local QoS requirements are filled by in-
dividual capabilities and global QoS requirements
by the service composition. The optimization prob-
lem can be solved using, for example, models (Ro-
binson et al., 2008) (Cardellini et al., 2009b) or
fuzzy logic (Nahrstedt et al., 2001).
Execution of the decisions made may include
adaptations at two different levels (Nahrstedt et al.,
2001): 1) the resource management level performs
application-neutral adaptation, and 2) the service
management level is responsible of the application
adaptation. The application adaptation can be about
adjusting application components and configura-
tions, or about selecting appropriate service provid-
ers for services.
EXPLORATION OF TECHNOLOGIES FOR AUTONOMIC DEPENDABLE SERVICE PLATFORMS
117

Sometimes it is not possible to find any service
providers that can fulfill the quality requirements set
by the client. In that case negotiation is needed. In
(Cardellini et al., 2009a) the service provisioning
level takes care of the negotiation with the service
provides so that the actual service selection is made
faster. In (Robinson et al., 2008), the consumer bro-
ker negotiates with the provider brokers.
The existing adaptive middleware solutions seem
to cover collectively all the main features required
for a dependable services platform. For example, the
MUSIC platform is able to take into account both
context and quality issues and in addition, it is de-
signed for ubiquitous and service-oriented environ-
ments. However, although it seems to support self-
configuring and self-optimizing it is unclear how it
would suit to an self-healing and self-protecting en-
vironment.
The performance and dependability of the exist-
ing platforms themselves are not yet clear. Some of
them have been designed for ubiquitous environ-
ments, but they have been applied only in restricted
contexts. Especially, more information is needed
about how these systems would be able to support
the management of large amounts of data in a short
time frame required by the critical services in the
smart city environment.
3.3 Enhanced Intelligence
An intelligent system is commonly thought to have a
capability of learning. The goal of learning is to im-
prove the performance of a system with respect to its
environment. Machine learning paradigms can be
divided into three major areas (Könönen, 2004):
• Supervised learning: A teacher, which knows the
correct input-output pairs, provides these to the
system, which is learning. The system tries to
emulate the teacher’s behavior and also general-
ize unseen data.
• Unsupervised learning: No teacher, and thereby
no correct outputs exist in the learning process.
• Reinforcement learning: Neither here are correct
outputs known, but the system learns those by in-
teracting with its environment – the mechanism is
called rewarding.
Supervised and unsupervised techniques have both
training phases, although the unsupervised version
has no labels – correct ‘answers’ of the training data
– available (Jayaraj et al, 2008). A complete ma-
chine learning method includes steps of selecting a
candidate model, and then estimating parameters for
it. The estimation is done with a learning algorithm
and available data. In practice, supervised learning
utilizes often an error function, which should be na-
turally minimized. Unsupervised learning uses clus-
tering; similarity of elements in the same cluster
should be maximized, and similarity of elements in
different clusters should be minimized.
In the formal model of the reinforcement learn-
ing, the system has a (discrete) state, which perce-
ives either completely or partially, a group of actions
possible in that state, and a reward which is received
when a new state is entered. The system’s behavior
and knowledge of the environment are modeled with
a function. Usually learning is not about maximiza-
tion of direct reward belonging to the state transi-
tion, but long-term performance. Reinforcement
learning can be applied to proactively adapting the
service platform for stress peaks caused by users,
overwhelming data or/and increased attacks.
Prediction provides four kinds of improvements
to self-adaptation (Cheng et al., 2009): prevents un-
necessary self-adaptation, reduces disruption from
incremental adaptation, enables pre-adaptation to
seasonal behaviour, and improves overall choice of
adaptation. Smart city applications would benefit
from proactive capabilities, for example, with using
the sensor information for discovering activity pat-
terns that might lead to emergency situations. In that
way, it could be possible to act on the situations be-
fore they occur and possibly prevent them. The simi-
lar approach is common in smart-home systems. For
example, CASAS (Rashidi and Cook, 2009) is an
adaptive smart-home system that utilizes machine
learning and data-mining techniques in order to
detect activity patterns, generate automation policies
for those patterns, and also adapt to the changes in
those patterns.
Learning capabilities can be also used for self-
protection. For example, an approach for wireless
anomaly based intrusion detection and response sys-
tem uses learning for detecting complex malicious
attacks (Fayssal et al., 2008). Training sets are used
by the system to generate rules for the behaviour to
be considered normal. Those rules are used during
runtime to detect complex wireless attacks and gen-
erate counter measures to protect one or more wire-
less resources and the privacy of their users. Fast
recovery without human intervention requires proper
policy management mechanisms and automated
ways to learn and derive policies (Fuad, 2010). Un-
like the current self-healing systems that most often
diagnose and heal failures after they have occurred
rather than anticipating failures, in consequence-
oriented diagnosis and recovery the host predicts or
diagnoses the possible consequences from the symp-
toms (Dai et al., 2009).
ICSOFT 2011 - 6th International Conference on Software and Data Technologies
118

4 ONTOLOGIES
4.1 Service Ontologies
Ontologies are used to represent knowledge in a
uniform way that machines are able to process. On-
tologies provide knowledge for describing the re-
quired and provided capabilities of a service, ability
and rights of achieving a service, and the quality
guaranteed for a service. The eXtensible Markup
Language (XML), Resource Definition Framework
(RDF) (Hayes, 2004), and Web Ontology Language
(OWL) (McGuinness and van Harmelen, 2004)
schema provide a basis for service description lan-
guages and ontologies, such as Web Ontology Lan-
guage for Services (OWL-S) (Barstow et al., 2004),
Web Service Modeling Ontology (WSMO)
(WSMO, 2004), and Internet Reasoning Service
(IRS) (Motta et al., 2003), which in turn provide
building blocks for service semantics. The above
mentioned service ontologies describe functionality
of services. Another set of ontologies focuses on
service context and quality properties. However,
existing service ontologies focus mainly on Web
services, and none of them provides complete sup-
port for service descriptions as required in adaptive
service platforms. After analysis of the existing on-
tologies (Kantorovitch and Niemelä, 2008), a con-
clusion is that the existing service ontologies have to
be enhanced.
In the software architecture field, the use of
viewpoints is a community-wide accepted approach
to cluster stakeholder-related concerns into a single
view. This principle can be lent to describing seman-
tics of services. The use of multiple views is a ne-
cessity; the interests of stakeholders differ, applica-
tion domains differ, and service functionality and
quality differ according to the usage and execution
contexts. Moreover, different application domains,
for example, information systems and pervasive
computing applications, require modeling languages
that take into account the characteristics of a domain
by providing a notation that can be enhanced and
adapted by domain specific extensions. The ap-
proach used in software product line engineering,
namely the separation of commonality and variabili-
ty, would be a viable approach that solves the prob-
lems in separation of common and domain specific
semantics, and the integrated use of the defined ser-
vice ontologies.
4.2 Context Ontologies
(Dey and Newberger, 2009) define context: ‘Context
is any information that can be used to characterize
the situation of an entity.’ Understanding of context
information is heavily improved during the last five
years. Recently published articles, e.g. (Bettini et al.,
2010) (Meier et al., 2009) (Kapitsaki et al., 2009)
indicate that knowledge on specification, modeling
and usage of context information might be mature
enough for realizing context-aware smart space ap-
plications. Typically, context information has three
dimensions; physical, computational and user con-
text (Bettini et al., 2010). In order to assist for
achieving interoperability on the levels that concern
context data and change of context, the context shall
(Preuveneers and Berbers, 2008) i) have a complete
domain coverage and terminology; ii) be expressive
and without semantic ambiguity; iii) be processed
without complexity; and iv) be evolvable.
Three types of context modeling and reasoning
approaches (Bettini et al., 2010) have been identi-
fied: an object-role based model, a spatial model and
an ontology based model. The object-role based ap-
proach supports various stages of the software engi-
neering process. Its weakness is a ‘flat’ information
model, i.e. all context types are represented as atom-
ic facts. The spatial context model is well suited for
context-aware applications that are mainly location-
based, like many mobile applications. The main con-
sideration of the spatial context model is the choice
of the underlying location model. Relational location
models are easier to build up than geographic loca-
tion models. SOUPA (Chen et al., 2005), as the only
standardized context ontology, provides the most
promising starting point for enhanced context ontol-
ogy of smart cities. Therefore, an initial version of a
context ontology introduced in (Pantsar-Syväniemi
et al., 2010) is an enhancement of SOUPA. This
context ontology defines three levels; i) the physical
context deals with raw context data gathered from
the environment by sensors; ii) the digital context
exploits physical context information and merges it
with the system’s internal context information re-
lated to applications and information; and finally iii)
the situation context clusters and abstracts the digital
context information in a way that it matches to the
application in hand and the preferences of its user.
Thereafter, the situation context is used for adapting
the application according to the view of the whole
context information that relates to the application.
4.3 QoS and Dependability Ontologies
Quality of Service (QoS) has a traditional meaning
as a property of communication technologies, in-
cluding throughput, latency, jitter, error rate, availa-
EXPLORATION OF TECHNOLOGIES FOR AUTONOMIC DEPENDABLE SERVICE PLATFORMS
119

bility, and network security. In service oriented ar-
chitectures, QoS is defined as dependability, main-
tainability, usability and scalability (O'Brien et al.,
2007). For end-users, QoS is the degree to which an
executed service meets its quality requirements.
Quality characteristics are often referred as non-
functional requirements, although many of them
(e.g. performance and dependability) are intertwined
with functionality of software. Typically, existing
quality ontologies have a specific focus. For exam-
ple, a quality ontology may deal with one or few
quality attribute(s) in defining, managing, or match-
ing quality properties. However, to guarantee QoS
requires comprehensive support for defining and
managing all the relevant quality attributes of ser-
vices, at design time and at run time.
There are several studies on QoS ontologies re-
lated to quality of Web Services. In (Anderson et al.,
2007), an overview of resilience knowledge base
(RKB) is described, in which dependability and se-
curity ontology is derived from the taxonomies of
(Avizienis et al., 2004) and developed specifically
for the RKB. The ontology is represented in OWL
and incorporates 166 terms related to Dependability
and Security, and 23 to Systems. Moreover, there are
QoS attribute ontologies and QoS-aware discovery
solutions based on service level agreements (Me-
nasce, 2002). Some papers also discuss performance,
dependability and service cost as well as mecha-
nisms of their aggregation (Yang et al., 2006) (Lock
and Dobson, 2009). Other dependability-related
metadata included into the description is i) the de-
velopment metadata, i.e. information about service
developers and implementation technology, and ii)
the deployment metadata, i.e. information related to
the hosting organization, location, deployment envi-
ronment, network connection capacity, etc.. Adding
this meta-information will allow clients to decide
how to use services by decreasing common mode
failures.
Dynamic operational state parameters, such as
current service load, CPU and memory usage, net-
work loading, etc. might also be added to the ex-
tended description. Extending a service description
with dependability metadata will bring us closer to a
dependable semantic service platform.
5 MODELING APPROACHES
5.1 Service Modeling
Service modeling can apply ontology based service
engineering, software engineering or/and domain
engineering modeling techniques. Knowledge engi-
neering applies ontologies for capturing and struc-
turing topic knowledge shared across people, organ-
izations, computers and software. Several methods
for ontology development exist, e.g. METHON-
TOLOGY (Fernandez-Lopez et al., 1997), and a set
of languages, such as XML, RDF, and OWL that
can be applied to represent knowledge in a machine
readable format. Moreover, OWL-S as a specific
service description language can be used for describ-
ing service semantics.
Semantic Web, Ontology Engineering, Semantic
Annotations, Semantic Search, Intelligent Services
(Modeling, Discovery and Integration) are standards
from W3C (www.w3c.org) and FIPA
(www.fipa.org) for describing semantics models.
The use of standards and open source tools (as W3C
standards and OWL in Protégé 2000 environment)
helps in sharing and using ontologies. Therefore,
open standards and open source tools are the key
enablers of semantics modeling. The advancement in
open source tools has greatly improved the ability to
test and build ontologies from scratch or/and to
reuse existing ontologies.
Application programming interfaces for ontolo-
gy languages provide programming language depen-
dent means to load ontologies, manipulate the ontol-
ogy classes and relations, perform reasoning, and
provide persistent storage for the model. Jena and
OWLS API are the most popular Java frameworks
for building semantic Web applications. These tools
provide an application developer with a program-
ming language for working with ontologies. Reason-
ing tools, such as FaCT++, Pellet, and RacerPro,
provide a standardized XML interface to description
logics systems. These tools help in ontology testing
and in the development of application level intelli-
gence based on ontologies described in OWL. Do-
main ontology specific editors such as OWLS Editor
and WSMO design studio help in creating error free
semantic descriptions based on a specific ontology.
Domain specific modeling addresses the specif-
ics of an application domain in the meta-models
from which a domain specific language is derived
(Kelly and Tolvanen, 2008). Although UML2 is a
generic modeling language, it also provides con-
structs to extend the language with domain specific
concepts. Thus, UML2 enhanced with domain spe-
cific ontologies that extends the language with ser-
vice, context and dependability ontologies makes it
applicable to the development of autonomic service
platforms.
ICSOFT 2011 - 6th International Conference on Software and Data Technologies
120

5.2 Context Modeling
Context-aware service engineering can be classified
into two classes (Kapitsaki et al., 2009); language
based approaches and model-driven approaches.
Language based approaches such as context-oriented
programming and aspect-oriented programming fol-
low the separation of concerns; applications are kept
context-free and context is handled as a first-class
entity of the programming language while separate
constructs are used to inject context-related behavior
into the adaptable skeleton of an application. Con-
text-aware aspects programming is one step further;
the aspects are driven by context, i.e. a particular
aspect may or may not be executed depending on the
context of use.
When trying to solve the complexity of context-
aware applications, the approaches for context mod-
eling and reasoning, namely object, spatial and on-
tology based have the following strengths and weak-
nesses;
• The object-role based approach supports various
stages of the software engineering process but
has an information model not suitable for model-
ing context information of smart cities.
• The spatial context modeling suits well for loca-
tion based applications, like mobile applications.
The drawback is the effort the special context
model takes to gather and keep up to date the lo-
cation data of the context information. Thus, this
model is suitable for those smart city applications
that do not have critical performance and depen-
dability requirements as in emergency situations.
• Ontological context models provide clear advan-
tage both in terms of support for heterogeneity
and interoperability. User-friendly graphical tools
make the design of ontological context models
viable to developers that are not particularly fa-
miliar with description logics. However, there is
very little support for modeling temporal aspects
in ontologies. However, the main problem might
be that reasoning with OWL poses serious per-
formance issues.
Programming based on the spatial context models
(Meier et al., 2009) uses a small set of predefined
types for composing context information. Thus, it is
a topographical approach for modeling a space, i.e.
the context of actors is modeled as a geometric
shape based on a sequence of coordinates. This
enables actors to independently define and use po-
tentially overlapping spatial context in a consistent
manner, when relationships between spatial objects
are defined implicitly, i.e. as the positions of the
spatial objects shapes within the coordinate system.
Thus, the spatial programming model enables effi-
cient integration of heterogeneous systems into a
global smart space. Although the programming
model might be a too sophisticated and overesti-
mated approach for developing smart cities, it is a
feasible enabler for self-organized sensor networks.
As mentioned, all approaches have weaknesses
that make their use such as unfeasible in autonomic
dependable service platforms. However, the generic
model for context monitoring and situation based
adaptation of application logic (Dey and Newberger,
2009) is part of a viable solution, as described in
(Pantsar-Syväniemi et al., 2010).
5.3 Dependability Modeling
Dependability is to be considered from three view-
points; as a system property; as a service capability,
and a failure free operation. Dependability of a com-
puting system is its ability to deliver a service that
can justifiably be trusted. Dependability of a service
is its behavior as it is perceived by the service us-
er(s). Based on the definition of failure, an alternate
definition of dependability exists, which comple-
ments the other definitions in providing a criterion
for adjudicating whether the delivered service can be
trusted or not: the ability of a system to avoid fail-
ures that are more frequent or more severe, and out-
age durations that are longer than is acceptable to the
user(s). The first two definitions relate to the system
and software design and implementation. The third
one relates to the space’s ability to survive under
failures. Thus, it relates to self-healing and self-
protecting, the characteristics of autonomic systems.
We understand dependability as a general con-
cept that manages four quality attributes; reliability,
availability, security and safety. Safety is not com-
mon in smart cities but extremely important in safe-
ty-critical systems, e.g. in trains and airplanes. Thus,
when using sensor information for making context-
aware smart city applications, we focus on reliabili-
ty, availability and security. Especially, our interest
is on how to deal with these quality properties in a
situation based manner and how to assure that quali-
ty requirements are met when ad-hoc situation based
adaptations are made.
Survivability concerns autonomic systems and is
a system’s capability to fulfill its mission, in a time-
ly manner, in the presence of attacks, failures or ac-
cidents. There are two aspects of survivability: pro-
tection and adaptation. Survival by protection refers
to run-time security management. Survival by adap-
tation is an ability of a system to adapt its behavior
to the changes that occur either in the system or ex-
ternally in the operating environment and users’ re-
EXPLORATION OF TECHNOLOGIES FOR AUTONOMIC DEPENDABLE SERVICE PLATFORMS
121

quirements (Tarvainen, 2007). Thus being self-
adaptive and self-protecting, the dependable service
platform should support survivability.
Security mechanisms like access control and en-
cryption attempt to ensure survivability by protect-
ing applications from harmful, accidental or mali-
cious changes in the environment. Applications can
also survive by adapting themselves to the changing
conditions. Survival by adaptation typically involves
monitoring and changing the quality goals so that
they can be achieved. In order to exploit architectur-
al design knowledge for runtime adaptation, the fol-
lowing activities should be supported; a) identifica-
tion of the internal and external contexts of the sys-
tem, b) reasoning the change of context, c) reasoning
the activities to be taken in order to achieve the qual-
ity goals defined, and finally, d) reconfiguring the
system in a manageable way. In proactive adapta-
tion, these activities have to be made before they
occur. Thus, appropriate learning techniques are
used for predicting the system’s behavior and mak-
ing it survivable by proactive actions.
Dependability modeling has four main modeling
phases. First, the semantics of dependability is de-
scribed at the design time by applying the quality-
driven architecture design and quality analysis me-
thodology (Ovaska et al., 2010). As a result, the sub-
attributes of dependability are described as separate
ontologies utilized for defining quality requirements.
Second, quality requirements are mapped to the
elements of software architecture models (Niemelä
et al., 2008). Third, the designed architecture is eva-
luated in order to detect whether required quality is
met or not. Fourth, quality of the implemented soft-
ware is measured and compared to requirements. In
practice, the above described approach with support-
ing techniques and tools can be exploited but the
approach needs enhanced middleware services that
able to use the design knowledge, represented in the
service, context and dependability ontologies, in
monitoring, reasoning and adapting dependability of
smart city applications.
6 DISCUSSION
As presented there are several technologies and solu-
tions for the development of autonomic dependable
systems composed of heterogeneous subsystems
such as sensors, networks, and storage systems.
While these subsystems can boost dependability,
research is required towards a holistic approach that
will consider large complex networked systems as a
whole. Therefore, the focus should be on an ap-
proach that hides the heterogeneity of sensor tech-
nologies, provides proactive strategies for QoS adap-
tation and easiness to use and understand the sensor
web and its applications. Moreover, the key enabling
technologies required for the future pervasive com-
puting environments to be explored extensively in
the ongoing and future research projects are:
• Semantics modeling (cf. section 4.1). A novel
semantics modeling technique is required. It shall
consist of i) stakeholder-centric views, ii) support
for the generic ontologies such as quality
attribute ontology of dependability and perfor-
mance, iii) a core ontology of the technology
domain (e.g. sensor webs), iv) application specif-
ic domain ontologies, and v) integrated orchestra-
tion of the developed ontologies in service engi-
neering.
• Dependability metrics and measuring techniques
(cf. section 4.3). Uniform quality metrics for ex-
ecution qualities are required. Moreover, com-
mon measuring techniques are needed for depen-
dability (i.e. reliability, availability and security)
and performance. A reuse-oriented approach is to
be established for exploiting the dependability
ontology in modeling semantics of autonomic
dependable service platforms and applications.
• Proactive adaptation (cf. section 3.3, 4.2, 5.2 and
5.3). A novel approach is required for measuring,
monitoring, adapting and predicting of system’s
behavior from quality point of view. QoS-driven
proactive adaptation requires innovative solutions
for 1) managing semantic descriptions at run-
time; 2) deriving quality indicators from basic
QoS measurements; and 3) enhanced adaptation
and learning algorithms. Furthermore, the proac-
tive QoS adaptation mechanism has to take into
account the constraints of the used technology;
how to deal with context awareness and resource
constraints of computing and communication en-
vironment.
• Dynamic semantic middleware (cf. section 3.1,
3.2, 5.1 and 5.2). There is a need for a dynamic
semantic middleware that allows proactive ser-
vice discovery, service composition and negotia-
tion, and evolution management of cross-domain
service platforms intended for heterogeneous
networked systems, devices, actuators and ap-
pliances used for environmental monitoring. The
middleware shall deal with interoperability of
sensors, devices and services in heterogeneous
multi-vendor environments.
7 CONCLUSIONS
In this paper we explored the existing technologies
ICSOFT 2011 - 6th International Conference on Software and Data Technologies
122

applicable for use in the development of autonomic
dependable service platforms that embody the tech-
nical challenges of pervasive computing environ-
ments, the business challenges of the multi-vendor
product development and the quality of service chal-
lenge of trusted services that insist on a dependable
and high efficient service platform.
We scoped our work by smart cities, the context
where intelligence of services is benefited the most
and where end-users should be supported with novel
software and service engineering technologies.
Moreover, we adopted an approach that exploits and
enhances legacy systems because making running
systems more intelligent and self-adaptive is a big
enough challenge.
As a conclusion, we identified four research top-
ics that need extensive research and developments,
namely i) semantics modeling, ii) dependability me-
trics and measuring techniques, iii) proactive adapta-
tion architectures, and iv) middleware support for
handling dynamism of self-organizing (ad-hoc) sen-
sor networks. Our future work will address these
topics.
ACKNOWLEDGEMENTS
This work is supported by the SOFIA/Artemis
project, co-funded by EU, Tekes, and VTT and the
Smash project, funded by VTT. The work of Liliana
Dobrica was supported by Romanian Scientific
Council CNCSIS –UEFISCSU, project number PNII
– IDEI 1238/2008.
REFERENCES
Anderson T., Andrews Z. H., Fitzgerald J.S., Randell B.,
Glaser H., Millard I.C., 2007. The ReSIST Resilience
Knowledge Base. 37th Annual IEEE/IFIP Intl. Conf.
on. Dependable Systems and Networks (DSN’2007).
Avizienis A., Laprie J-C., Randell B., Landwehr C., 2004.
Basic Concepts and Taxonomy of Dependable and Se-
cure Computing. IEEE Trans. on Dependable and Se-
cure Computing, vol. 1, no. 1, pp. 11-33.
Balazinka M., Deshpande A., Flanklin M. J., Gibbons
P.B., Gray J., Nath S., Hansen M., Liebhold M., Sza-
lay A. and Tao V., 2007. Data management in the
worldwide sensor web. Pervasive Computing, June-
April, 30-40.
Baresi L., Guinea S. and Pasquale L., 2008. Towards a
unified framework for the monitoring and recovery of
BPEL processes. In: Testing, Analysis and Verification
of Web Software, TAV-WEB, pp. 15-19.
Barstow A., Hendler J. and Skall M., 2004. OWL Web
Ontology Language for Services, W3C. http://xml.
coverpages. org/ni2004-01-08-a.html
Bettini C., Brdiczka O., Henricksen K., Indulska J., Niclas
D., Ranganathan A., and D. Riboni. 2010. A survey of
context modelling and reasoning techniques. Pervasive
and Mobile Computing.
Botts M., Percivall G., Reed C. and J. Davidson, 2008.
OSG
®
Sensor Web Enablement: Overview and High
Level Architecture. LNCS 4540, Springer-Verlag, pp.
175–190.
Cardellini V., Casalicchio E., Grassi V., Presti F. L. and.
Mirandola R, 2009a. A scalable approach to QoS-
aware self-adaption in service-oriented architectures.
In: QSHINE, pp. 431-447.
Cardellini V., Casalicchio E., Grassi V., Presti F. Lo and
Mirandola R.,2009b. QoS-driven runtime adaptation
of service oriented architectures. In: The 7th Joint Eu-
ropean Soft. Eng. Conf. and ACM SIGSOFT Symp. on
the Foundations of Soft. Eng., pp. 131-140.
Cardellini V., Casalicchio E., Grassi V., Presti F. Lo and
R. Mirandola, 2009c. Towards self-adaptation for de-
pendable service-oriented systems. In: Architecting
Dependable Systems VI, pp. 24-48.
Chen H., Finin T. and Joshi A., 2005. The SOUPA Ontol-
ogy for Pervasive Computing. Whitestein Series in
Software Agent Technologies, Springer.
Cheng, S-W, Poladian, V., Garlan, D., Schmerl, B., 2009.
Improving Architecture-Based Self-Adaptation
through Resource Prediction, In: Self-Adaptive Sys-
tems, LNCS 5525, Springer-Verlag, pp.71-88.
Chu X. and Buyya R., 2007. Service oriented sensor web.
Sensor Networks and Configuration, Springer-Verlag,
51-74.
Dai, Y., Xiang, Y., Zhang, G., 2009. Self-healing and
Hybrid Diagnosis in Cloud Computing. In: M.G. Jaa-
tun, G.Zhao, and C.Rong (Eds.): CloudCom 2009,
LNCS 5931, Springer-Verlag, pp- 45-56.
Dey A. K. and Newberger A., 2009. Support for Context-
Aware Intelligibility and Control. In: CHI 2009, Pro-
gramming Tools and Architectures, USA.
Fayssal, S., Al-Nashif, Y., Uk Kim, B., Hariri, S., 2008. A
Proactive Wireless Self-Protection System. In:
ICPS’08, July 6-10, Sorrento Italy, ACM, pp.11-20.
Fernandez-Lopez M., Gomez-Perez A., Juristo N., 1997.
Methontology: from ontological art towards ontologi-
cal engineering. In: Procs. Spring Symposium on onto-
logical engineering of AAAI.
Fuad, M.M., 2010. Issues and Challenges of an Inductive
learning Algorithm for Self-healing Applications. The
7th Intl. Conf. on Information Technology: New
Generations (ITNG10), IEEE Press, pp. 264-269.
Hayes P., 2004. RDF Semantics, W3C, http://www.w3.org
/TR/rdf-schema/
Jayaraj A., Venkatesh T. and Murthy C.S.R., 2008. Loss
classification in optical burst switching networks using
machine learning techniques: improving the perfor-
mance of TCP. IEEE Journal on Selected Areas in
Communications, vol.26, no.6, pp.45-54.
Kantorovitch J. and Niemelä E., 2008. Service Descrip-
tion Ontologies. Encyclopedia of Information Science
and Technology, Vol. VII, pp. 3445-3451.
EXPLORATION OF TECHNOLOGIES FOR AUTONOMIC DEPENDABLE SERVICE PLATFORMS
123

Kapitsaki G., Prezerakos G., Tselikas N., and I. Venieris.
2009. Context-aware service engineering: A survey.
The Journal of Systems and Software, 83, 1885-1297.
Kelly S, and Tolvanen J., 2008. Domain-Specific Model-
ling: Enabling Full Code Generation. Wiley.
Kephart J. O. and Chess D. M., 2003. The vision of auto-
nomic computing. Computer 36(1), pp. 41-50.
Könönen V., 2004. Multiagent reinforcement learning in
Markov games: asymmetric and symmetric approach-
es, Doctoral thesis, Helsinki University of Technolo-
gy, Report D8, Espoo, Finland.
Lock R. and Dobson G., 2009. Developing an ontology for
QoS. Dependability interdisciplinary research Colla-
boration (Internal Annual Project Conference), Nesc.
(National e-Science centre).
McGuinness D. and van Harmelen F., 2004. OWL Web
Ontology Language Overview, W3C., http://www.
w3.org/TR/owl-features/
Meier R., Harrington A., Beckmann K., and Cahill, V.,
2009. A framework for incremental construction of
real global smart space applications. Pervasive and
Mobile Computing, 5, 350-368.
Menasce D. A. and Dubey V., 2007. Utility-based QoS
brokering in service oriented architectures. In: IEEE
Intl Conf on Web Services, ICWS 2007, pp. 422-430.
Menasce D. A., 2002. QoS Issue in Web Services. IEEE
Internet Computing, vol. 6, issue 6, pp. 49-68.
Mokhtar S. B., Georgantas N. and Issarny V., 2007. CO-
COA: COnversation-based service COmposition in
pervAsive computing environments with QoS support,
Journal of Systems and Software 80(12), pp. 1941-
1955.
Motta E., Domingue J., Cabral L.and Gaspari M., 2003.
IRS-II: A Framework and Infrastructure for Semantic
Web Services. ISWC 2003, in Sanibel Island, USA.
Nahrstedt K., Xu D., Wichadakul D. and Li B., 2001.
QoS-aware middleware for ubiquitous and heteroge-
neous environments. IEEE Communications Maga-
zine, vol. 39, no. 11, pp. 140-148.
Niemelä E., Evesti A. and Savolainen P., 2008. Modeling
Quality Attribute Variability. 3
rd
International Confe-
rence on Evaluation of Novel Approaches of Software
Engineering, ENASE 2008.
O'Brien L., Merson P. and Bass L., 2007. Quality
Attributes for Service-Oriented Architectures. Interna-
tional Workshop on Systems Development in SOA En-
vironments (SDSOA'07).
Ovaska E., Evesti A., Henttonen K., Palviainen M. and
Aho P., 2010. Knowledge Based Quality Driven Ar-
chitecture Design and Evaluation. Information and
Software Technologies, 52 (6), 577-601.
Pantsar-Syväniemi S., Simula K., Ovaska E., 2010. Con-
text-awareness in smart spaces. 1
st
International
Workshop on Semantic Information for Smart Spaces,
SISS 2010, IEEE, pp. 1023-1028.
Papakos P., Rosenblum D. S., Mukhija A. and Capra L.,
2009. VOLARE: Adaptive web service discovery
middleware for mobile systems. 2nd Intl DisCoTec on
Context-Aware Adaptation Mechanisms for Pervasive
and Ubiquitous Services (CAMPUS 2009).
Preuveneers D., and Berbers Y., 2008. Internet of Things:
A Context-Awareness Perspective, The Internet of
Things: From RFID to the Next Generation Pervasive
Networked Systems, CRC Press, 287-307.
Rashidi P. and Cook D. J., 2009. Keeping the resident in
the loop: adapting the smart home to the user. IEEE
Transactions on Systems, Man and Cybernetics, Part
A (Systems and Humans), vol. 39, no.5, pp. 949-959.
Robinson D., Kotonya G. and Department C., 2008. A
self-managing brokerage model for quality assurance
in service-oriented systems. In: 11th IEEE High As-
surance Systems Eng. Symp., HASE, pp. 424-433.
Rouvoy R., Barone P., Ding Y., Eliassen F., Hallsteinsen
S., Lorenzo J., Mamelli A. and Scholz U., 2009. MU-
SIC: Middleware support for self-adaptation in ubi-
quitous and service-oriented environments. In: Softw.
Eng. for Self-Adaptive Systems, pp. 164-182.
Salehie M. and Tahvildari L., 2009. Self-Adaptive Soft-
ware: Landscape and Research Challenges. ACM
Trans. on Autonomous and Adaptive Systems, 4(2).
Tarvainen P., 2007. Adaptability evaluation of software
architectures; a case study. 31
st
Annual IEEE Int.
Computer Software and Applications Conf. (COMP-
SAC 2007). IEEE Computer Science.
WSMO, 2004. WSMO studio, http://www. wsmostu-
dio.org/
Yang S., Lan B. and Chung J-Y., 2006. Analysis of QoS
Aware Web Services. Intl. Comp. Symp. on Web
Technologies and Information Security (ICS) .
Zeng L., Benatallah B., Ngu A.H., Dumas M., Kalagna-
nam J., Chang H., 2004. QoS-aware middleware for
web services composition, IEEE Trans. Software Eng.
30(5), pp. 311-327.
ICSOFT 2011 - 6th International Conference on Software and Data Technologies
124
