
AN IMPLEMENTATION FRAMEWORK FOR COMPONENT-BASED
APPLICATIONS WITH REAL-TIME CONSTRAINTS
Extensions for Achieving Component Distribution
Francisco Sánchez-Ledesma, Juan A. Pastor, Diego Alonso and Francisca Rosique
School of Telecommunication Engineering, Technical University of Cartagena
Plaza del Hospital n
o
1, 30202 Cartagena, Spain
Keywords:
Component distribution, Middleware, Component-based software development.
Abstract:
Reactive system design requires the integration of structural and behavioural requirements with temporal ones
(along with V&V activities) to describe the application architecture. We have adopted the Model-Driven
Software Development approach to address these problems globally: from the definition of the application
architecture to the generation of both code and analysis models. An Object Oriented framework was developed
in order to ease the generation of code, as well as to provide the required properties for the final application
(specifically, temporal behaviour). This paper describes how distribution support was added to the framework
in a regular way without disrupting its design, and allowing users to integrate communication overload in
timing analysis.
1 INTRODUCTION
There is a well established tradition of applying
Component Based Software Development (CBSD)
(Szyperski, 2002) principles in the robotics commu-
nity, which has resulted in the appearance of several
tool–kits and frameworks for developing robotic ap-
plications (Rosta, 2010). The main drawback of such
frameworks is that, despite being Component-Based
(CB) in their conception, designers must develop, in-
tegrate and connect these components using Object-
Oriented (OO) technology. The problem comes from
the fact that CB designs require more (and rather dif-
ferent) abstractions and tool support than OO technol-
ogy can offer. Moreover, most of these frameworks
impose the overall internal behaviour of their compo-
nents. In particular, robotic systems are reactive sys-
tems with Real-Time (RT) requirements by their very
nature, and most of the frameworks for robotics do
not provide mechanisms for managing such require-
ments. Additionally, these systems normally com-
prise several computational nodes, and thus distribu-
tion is also an important issue. From our point of
view, the design and implementation of CB frame-
works for robotic applications development should
overcome, among others, the following problems:
1. The definition or adoption of a component lan-
guage for modelling applications. This language
should allow designers to work with CB abstrac-
tions rather than with OO ones. It should also take
into account the systems requirements, including
their timing properties.
2. The translation of the resulting models to exe-
cutable code and to analysis models that can be
injected to tools in order to analyse both the CB
application properties and the properties of the re-
sulting executable code.
3. It is necessary to provide services for component
distribution that are compatible with the CB archi-
tecture and its RT requirements.
As explained below, the Model Driven Software
Development (MDSD) (Schmidt, 2006) approach al-
lows addressing these problems globally, and con-
stitutes the technological framework where the work
presented in this paper is being developed. MDSD
enables us to define a component language for mod-
elling the application architecture, to define a set of
model transformations for both generating implemen-
tation code and analysis models from the previously
defined models, and to integrate component distribu-
tion and timing properties in an orthogonal way.
290
Sánchez-Ledesma F., A. Pastor J., Alonso D. and Rosique F..
AN IMPLEMENTATION FRAMEWORK FOR COMPONENT-BASED APPLICATIONS WITH REAL-TIME CONSTRAINTS - Extensions for Achieving
Component Distribution.
DOI: 10.5220/0003500402900293
In Proceedings of the 6th International Conference on Software and Database Technologies (ICSOFT-2011), pages 290-293
ISBN: 978-989-8425-77-5
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

The remainder of this paper is organized as follows.
Section 2 explains the overall approach and the way
in which CB concepts have been translated into OO
concepts to generate executable programs, resulting
in the development of an OO implementation frame-
work. Section 3 explains the importance of including
in the framework support for component distribution,
as well as to justify the approach taken to do so. Sec-
tion 4 explains in detail component deployment. Fi-
nally, Section 5 presents the conclusions and future
work.
The paper considers the domain of service robots,
but it could be extended to other domains with sim-
ilar characteristics, since we consider “generic” or
“domain-independent” concepts.
2 GENERAL OVERVIEW AND
PREVIOUS WORKS
Our global development approach starts by mod-
elling the architecture of the application using the
CBSD approach, and then use a series of model
transformations to generate both analysis models
and executable code. Though any modelling lan-
guage can be used for performing the first step,
we developed our own modelling language, entitled
V
3
CMMV3CMM V
3
CMMV3CMM (Iborra et al.,
2009). This language provides three complementary
but loosely coupled views that allows designers to de-
fine and connect software components, namely: (1) an
architectural view to define components (interfaces,
ports, services offered and required, composite com-
ponents, etc.), (2) a coordination view to specify com-
ponent behaviour, based on timed automata theory,
and finally (3) an algorithmic view to express the se-
quence of actions executed by a component according
to its current state, based on activity diagrams.
In order to ease the generation of executable code
from the application expressed in terms of architec-
tural components, an OO framework was designed
and implemented (Pastor et al., 2010). Such frame-
work provides the base classes for implementing the
components of the architectural design defined in
V
3
CMMV3CMM, and an infrastructure for the user
to choose the concurrency features that he ultimately
wants for the application: number of threads, code
allocated to such threads, deadlines, priorities, etc.
The framework provides an OO interpretation of the
CBSD concepts that allows translating the CB de-
signs to OO applications. The design and documen-
tation of the framework was carried out using de-
sign patterns, which is a common practice in Soft-
ware Engineering (Buschmann et al., 2007). Figure
fig:secuenciaPatrones shows the sequence of patterns
applied to the design of the framework in order to
meet the following requirements:
1. Control over concurrency policy: thread number,
thread spawning (static vs. dynamic policies) and
thread characteristics (deadline, period, priority,
etc.), scheduling policy (fixed priority schedulers
vs. dynamic priority scheduler). Unlike most
frameworks, these tasking issues are very impor-
tant for us, and can be selected by the user of the
framework.
2. Control over the allocation of activities to threads,
that is, control over the computational load as-
signed to each thread. The framework allows allo-
cating all the activities to a single thread, allocat-
ing every activity to its own thread, or a combina-
tion of both policies. In any case, the framework
design ensures that only the activities belonging
to active states are executed.
3. Control over the communication mechanisms be-
tween components. The communication mecha-
nism implemented by default in the framework is
the asynchronous without reply scheme, based on
the exchange of messages.
4. Facilitate the instantiation of the framework to ob-
tain OO code from the CBSD model.
5. Control over the distribution policy of the compo-
nents in computational nodes.
The framework defines extra regions and activi-
ties to manage the flow of messages through ports,
the internal memory of the component, and each re-
gion of the component’s state machine. It is worth
highlighting that this design facilitates schedulability
analysis, since no code is “hidden” in the framework
implementation, but it must be explicitly allocated to
a particular thread.
With all this, the framework code is organized into
three groups with clearly defined interfaces: (C1) pro-
vides the runtime support, (C2) provides an OO inter-
pretation of the CBSD concepts and the framework
’hot-spots’, and (C3) the application-specific code
that supplement the ’hot-spots’ of the framework to
create a specific application. This classification en-
ables providing an alternative interpretation of CBSD
concepts (C2) that use the same run-time (C1), and
reusing the same application (C3) in a different run-
time (C1), provided that C2 is not changed.
3 COMPONENT DISTRIBUTION
Despite the number of currently available middleware
technologies, we decided to develop an ad-hoc mid-
AN IMPLEMENTATION FRAMEWORK FOR COMPONENT-BASED APPLICATIONS WITH REAL-TIME
CONSTRAINTS - Extensions for Achieving Component Distribution
291
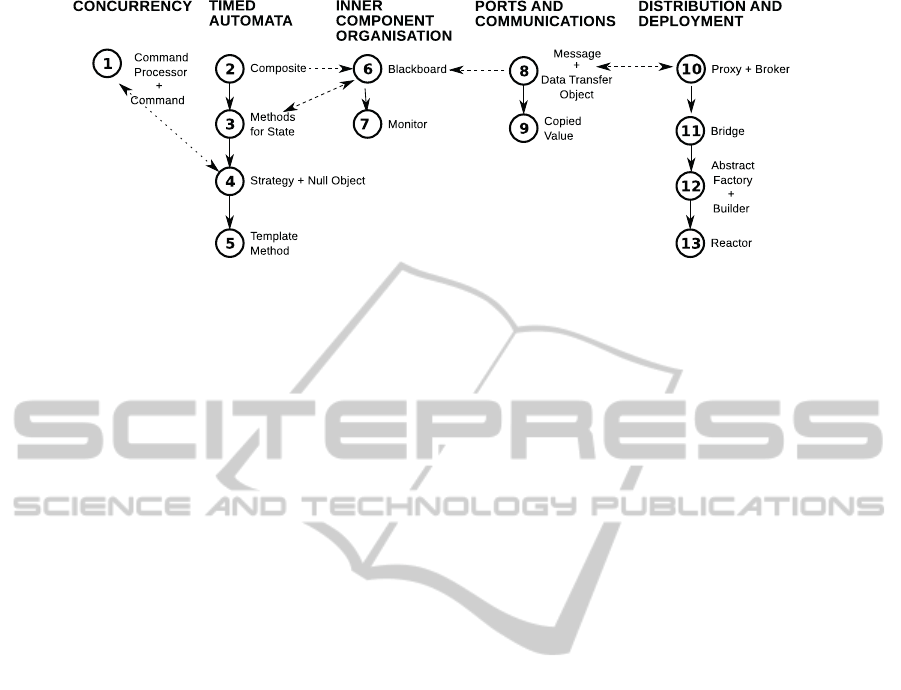
Figure 1: Dependency relationships existing between the patterns considered in the framework development and the
V
3
CMMV3CMM V
3
CMMV3CMM views.
dleware for carrying out component distribution for
the following reasons:
• The users of commercial middleware normally
lose the control over the execution of the appli-
cation (the “inversion of control” problem), as
well as some RT characteristics (like number of
threads, thread periods, computing time, etc.) that
must be taken into account if RT analysis is re-
quired, as in our case.
• We do not need all the distribution services nor-
mally provided by middlewares like CORBA. In
our case, the components that make the applica-
tion up and the connections among them are de-
fined in the input models, and therefore services
like naming, registering, searching, etc. are not
needed.
Newly, the artefacts in charge of managing com-
ponent distribution and deployment are considered
“normal” components, in the sense that they use the
same elements and behave exactly like any other com-
ponent in the application. This allows us to regularly
include the communication overhead in the RT anal-
ysis, provided that transmission times are known and
can be incorporated to the execution time associated
to the activities that manage communications.
In order to make the distribution possible and fea-
sible, two artefacts have been defined: one belonging
to the CBSD domain (the LOCALPROXYMANAGER
component) and the other a class of the framework
(the APPLICATIONDEPLOYER class). It is worth
highlighting that the implementation of both elements
did not require modifying the original framework
structure, but they only instantiate the base classes
provided by it.
The APPLICATIONDEPLOYER class acts as the
master node for application deployment, and
thus it must be executed in its own node before
the application can be deployed. The APPLI-
CATIONDEPLOYER is in charge of notifying
each LOCALPROXYMANAGER component
(previously deployed in each and every node
that make the application up) which component
it must create (or destroy), which ports it must
connect (or disconnect), and to which other nodes
it must establish a TCP connection. Thus, the
APPLICATIONDEPLOYER can be considered as a
simplified Broker (Schmidt et al., 2000), without
explicit register nor look-up services.
The LOCALPROXYMANAGER component is de-
fined using V
3
CMMV3CMM, in terms of ports,
operations, states, etc., and its objectives are (i) to
create and connect component instances in the
node it manages, and (ii) to act as a proxy of the
ports of remote components. This component is
not meant to be directly added by the application
developer, but, for each deployment node, one of
such components is automatically added to the
architecture of the application, and then imple-
mented by the framework distribution service.
At the time of making application deployment,
every LOCALPROXYMANAGER create ports that
replicates local ports of the components hosted
on others nodes as commanded by the APPLICA-
TIONDEPLOYER. In this way communication is
carried out as if both components were contained
within the same node.
4 CONCLUSIONS AND FUTURE
WORK
This paper has described the evolution of a previous
work, where a OO framework for implementing CB
designs was described. The new features consist on
the support for component distribution. Distribution
capacity was added in a regular way to the frame-
work, respecting its original design. This regularity
allows us to analyse the impact on the temporal char-
ICSOFT 2011 - 6th International Conference on Software and Data Technologies
292

acteristics of the application that has a certain dis-
tribution of its components. Only the strictly neces-
sary distribution services have been incorporated to
the framework in order to perform component dis-
tribution, taking into account that the architecture is
defined previously, and thus it is an input parame-
ter to the master node. The proposed solution is not
closed to future improvements, but it is a stable start-
ing point for further development. The approach has
been validated with small–scale applications, targeted
to “academic” platforms (the in–house developed ve-
hicle Lazaro, the Pioner P3AT commercial robot, and
a simple electrical vehicle). Therefore it still needs to
be tested in larger applications.
The work described in this article is a work in
progress. Currently, work is continuing to extend
the framework with additional features following a
pattern-driven approach. Among these extensions it
is worth highlighting the following (1) the addition
of heuristics to determine the number of threads and
carry out the assignment of the activities of the com-
ponents to these threads, (2) development of model
transformations to instantiate the framework from an
input componentmodel, (3) adapt the implementation
to be compliant with the Ravenscar profile for design-
ing strict RT applications, and (4) development of a
model transformation for generating input models for
analysis tools.
ACKNOWLEDGEMENTS
This work has been partially supported by the Spanish
CICYT Project EXPLORE (ref. TIN2009-08572).
REFERENCES
Buschmann, F., Henney, K., and Schmidt, D. (2007).
Pattern-Oriented Software Architecture, Volume 5:
On Patterns and Pattern Languages. John Wiley and
Sons Ltd.
Iborra, A., Alonso, D., Ortiz, F., Franco, J., Sánchez, P., and
Álvarez, B. (2009). Design of service robots. IEEE
Robot. Automat. Mag., Special Issue on Software En-
gineering for Robotics, 16(1):24–33.
Pastor, J., Alonso, D., Sánchez, P., and Álvarez, B. (2010).
Towards the definition of a pattern sequence for real-
time applications using a model-driven engineering
approach. In Proc. of the 15
th
Ada-Europe Interna-
tional Conference on Reliable Software Technologies,
Ada Europe 2010, LNCS, pages 167–180. Springer-
Verlag.
Rosta (2010). Robot Standards and Reference Archi-
tectures (RoSTa), Coordination Action funded under
EU’s FP6.
Schmidt, D. (2006). Model-driven engineering. IEEE Com-
puter, 39(2):25–31.
Schmidt, D., Stal, M., Rohnert, H., and Buschmann, F.
(2000). Pattern-oriented software architecture, vol-
ume 2: patterns for concurrent and networked objects.
Wiley.
Szyperski, C. (2002). Component software: beyond object-
oriented programming. A-W, 2 edition.
AN IMPLEMENTATION FRAMEWORK FOR COMPONENT-BASED APPLICATIONS WITH REAL-TIME
CONSTRAINTS - Extensions for Achieving Component Distribution
293
