
IMAGE MATCHING ALGORITHMS IN STEREO VISION
USING ADDRESS-EVENT-REPRESENTATION
A Theoretical Study and Evaluation of the Different Algorithms
M. Dominguez-Morales, E. Cerezuela-Escudero, A. Jimenez-Fernandez, R. Paz-Vicente
J. L. Font-Calvo, P. Iñigo-Blasco, A. Linares-Barranco and G. Jimenez-Moreno
Department of Architecture and Computer Technology, University of Seville, Seville, Spain
Keywords: Stereo vision, Epipolar restriction, Image matching, Address-event-representation, Spike, Retina,
Area-based method, Features-based method.
Abstract: Image processing in digital computer systems usually considers the visual information as a sequence of
frames. These frames are from cameras that capture reality for a short period of time. They are renewed and
transmitted at a rate of 25-30 fps (typical real-time scenario). Digital video processing has to process each
frame in order to obtain a filter result or detect a feature on the input. In stereo vision, existing algorithms
use frames from two digital cameras and process them pixel by pixel until it is found a pattern match in a
section of both stereo frames. Spike-based processing is a relatively new approach that implements the
processing by manipulating spikes one by one at the time they are transmitted, like a human brain. The
mammal nervous system is able to solve much more complex problems, such as visual recognition by
manipulating neuron’s spikes. The spike-based philosophy for visual information processing based on the
neuro-inspired Address-Event- Representation (AER) is achieving nowadays very high performances. In
this work we study the existing digital stereo matching algorithms and how do they work. After that, we
propose an AER stereo matching algorithm using some of the principles shown in digital stereo methods.
1 INTRODUCTION
In recent years there have been numerous advances
in the field of vision and image processing, because
they can be applied for scientific and commercial
purposes to numerous fields such as medicine,
industry or entertainment.
As we can easily deduce, the images are two
dimensional while the daily scene is three
dimensional. This means that, between the passage
from the scene (reality) to the image, it has lost what
we call the third dimension.
Nowadays, society has experimented a great
advance in these aspects: 2D vision has given way to
3D viewing. Industry and research groups have
started to study this field in depth, obtaining some
mechanisms for 3D representation using more than
one camera. Trying to resemble the vision of human
beings, researchers have experimented with two-
camera-based systems inspired by human vision.
Following this, it has been developed a new branch
of research, focused on stereoscopic vision (S. T.
Barnard, M. A. Fischler, 1982). In this branch,
researchers try to obtain three-dimensional scenes
using two digital cameras. Thus, we try to get some
information that could not be obtained with a single
camera, i.e. the distance that the objects are.
By using digital cameras, researchers have made
a breakthrough in this field, going up to create
systems able to achieve the above. However, digital
systems have some problems that, even today, have
not been solved. In any process of stereoscopic
vision, image matching is the main problem that has
consumed a large percentage of research resources
in the field of stereoscopic vision, and it is still
completely open to research. The problems related
to evolving image matching are the computational
cost needed to obtain appropriate results. There are
lots of high-level algorithms used in digital stereo
vision that solve the image matching problem, but
this implies a computer intervention into the process
and it is computationally expensive.
The required computational power and speed
make it difficult to develop a real-time autonomous
system. However, brains perform powerful and fast
vision processing using millions of small and slow
79
Dominguez-Morales M., Cerezuela-Escudero E., Jimenez-Fernandez A., Paz-Vicente R., Font-Calvo J., Iñigo-Blasco P., Linares-Barranco A. and
Jimenez-Moreno G..
IMAGE MATCHING ALGORITHMS IN STEREO VISION USING ADDRESS-EVENT-REPRESENTATION - A Theoretical Study and Evaluation of the
Different Algorithms.
DOI: 10.5220/0003518500790084
In Proceedings of the International Conference on Signal Processing and Multimedia Applications (SIGMAP-2011), pages 79-84
ISBN: 978-989-8425-72-0
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
cells working in parallel in a totally different way.
Primate brains are structured in layers of neurons,
where the neurons of a layer connect to a very large
number (~104) of neurons in the following one (G.
M. Shepherd, 1990). Most times the connectivity
includes paths between non-consecutive layers, and
even feedback connections are present.
Vision sensing and object recognition in brains
are not processed frame by frame; they are
processed in a continuous way, spike by spike, in the
brain-cortex. The visual cortex is composed by a set
of layers (G. M. Shepherd, 1990), starting from the
retina. The processing starts when the retina captures
the information. In recent years significant progress
has been made in the study of the processing by the
visual cortex. Many artificial systems that
implement bio-inspired software models use
biological-like processing that outperform more
conventionally engineered machines (J. Lee, 1981;
T. Crimmins, 1985; A. Linares-Barranco, 2010).
However, these systems generally run at extremely
low speeds because the models are implemented as
software programs. For real-time solutions direct
hardware implementations of these models are
required. A growing number of research groups
around the world are implementing these
computational principles onto real-time spiking
hardware through the development and exploitation
of the so-called AER (Address Event
Representation) technology.
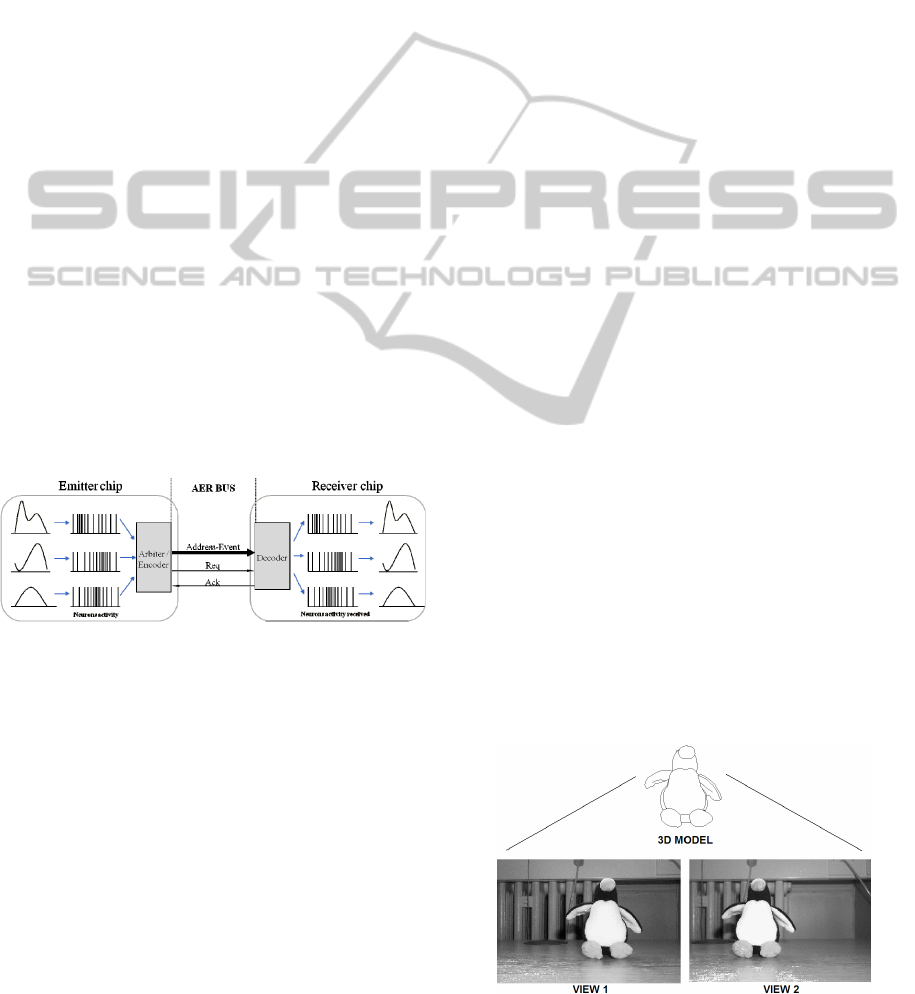
Figure 1: Rate-coded AER inter-chip communication
scheme.
AER was proposed by the Mead lab in 1991 (M.
Sivilotti, 1991) for communicating between
neuromorphic chips with spikes. Every time a cell
on a sender device generates a spike, it transmits a
digital word representing a code or address for that
pixel, using an external inter-chip digital bus (the
AER bus, as shown in figure 1). In the receiver the
spikes are directed to the pixels whose code or
address was on the bus. Thus, cells with the same
address in the emitter and receiver chips are virtually
connected by streams of spikes. Arbitration circuits
ensure that cells do not access the bus
simultaneously. Usually, AER circuits are built with
self-timed asynchronous logic.
Several works are already present in the
literature regarding spike-based visual processing
filters. Serrano et al. presented a chip-processor able
to implement image convolution filters based on
spikes that work at very high performance
parameters (~3GOPS for 32x32 kernel size)
compared to traditional digital frame-based
convolution processors (B. Cope, 2006; B. Cope,
2005; A. Linares-Barranco, 2010).
There is a community of AER protocol users for
bio-inspired applications in vision and audition
systems, as evidenced by the success in the last
years of the AER group at the Neuromorphic
Engineering Workshop series. One of the goals of
this community is to build large multi-chip and
multi-layer hierarchically structured systems capable
of performing complicated array data processing in
real time. The power of these systems can be used in
computer based systems under co-processing.
First, we describe digital stereo matching
algorithms, their pro and cons, and their operation.
Then we propose an AER theoretical algorithm,
based on the digital ones, which can be developed in
AER systems using a FPGA to process the
information.
2 DIGITAL STEREO MATCHING
ALGORITHMS
The two-camera model in stereo vision draws on the
biological model itself, where the object distance
can be determined thanks to the distance between
the two eyes; this could be the considered as the
third dimension. The eye separation produces
displaced images of the same scene captured by two
eyes (as shown in figure 2), i.e. the image of an eye
is almost the same as other’s but displaced a certain
distance, what is inversely proportional to the
distance between eyes and objects.
According to this, stereo vision process includes
Figure 2: Stereo-vision system.
SIGMAP 2011 - International Conference on Signal Processing and Multimedia Applications
80
six main steps (S. T. Barnard, 1982): image
acquisition, camera modeling (depending on the
system geometry. D. Papadimitriou, 1996), features
extraction from the scene, image matching according
to these features, determining the objects distance,
and interpolating, if necessary. In these steps, image
matching is regarded as the most complex of all.
The projection for a three-dimensional-space
point is determined for each image of the stereo pair
during the image matching. The solution for the
matching problem demands to impose restrictions on
the geometric model of the cameras and the
photometric model of the scene objects. Of course,
this solution implies a high computational cost.
A common practice is trying to relate the pixel of an
image with its counterpart on the other one. Some
authors divide the matching methods depending on
the restrictions that exploits. According to this, a
high-level division could be as follows:
Local methods: Methods that applies
restrictions on a small number of pixels around
the pixel under study. They are usually very
efficient but sensitive to local ambiguities of
the regions (i.e. regions of occlusion or regions
with uniform texture). Within this group are:
the area-based method, features-based method,
as well as those based on gradient optimization
(S.B. Pollard, 1985).
Global methods: Methods that applies
restrictions on lines of the image or the entire
image itself. They are usually less sensitive to
local peculiarities as add support to regions
difficult to study locally. However, they tend to
be computationally expensive. Within this
group are the dynamic programming methods
and nearest neighbour methods.
Each technique has its advantages and
disadvantages and, depending on the system
restrictions and the cameras geometry (G. Pajares,
2006).
Local methods will be discussed later in more
detail. We won’t go further into global methods
because they are rarely used due to their
computational cost.
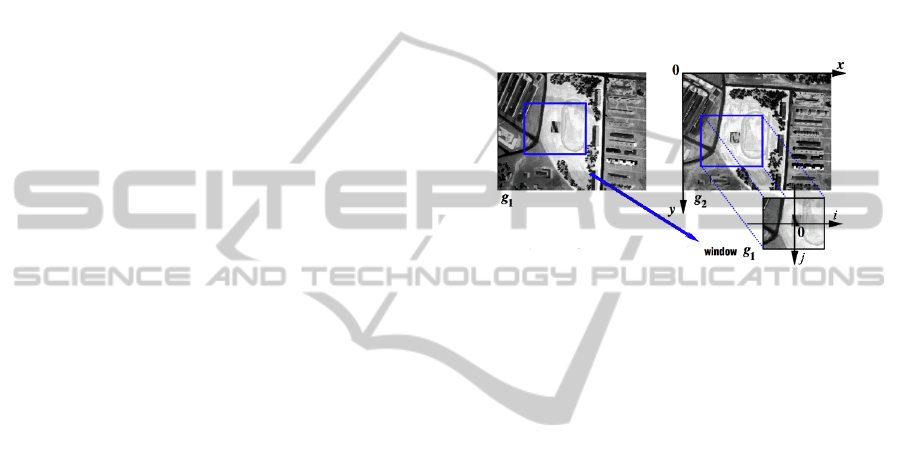
2.1 Area-based Matching Algorithms
We calculate the correlation between the distribution
of disparity for each pixel in an image using a
window centered at this pixel, and a window of the
same size centered on the pixel to be analyzed in the
other image (as shown in figure 3). The problem is
to find the point to be adjusted properly at first. The
effectiveness of these methods depends largely on
the width of the taken window. Thus, we can assume
that the larger the window, the better the outcome.
However, the computing power requirements these
methods. We have to find a window size large
enough to ensure finding a correspondence (S.B.
Pollard, 1985) between two images in most of the
cases, but the window width should not be
overwhelmed as it would cause a huge latency in our
system. Also, if the window size is close to the total
size, it would be deriving to the global methods,
which we were dismissed because of their
computational inefficiency.
Figure 3: Window correlation.
The main advantage of these correlation
mechanisms has been previously named in multiple
times, and it is their computational efficiency (T.
Tuytelaars, 2000). This characteristic is crucial if we
want our system to perform fairly well in real time.
On the other hand, the main drawbacks in digital
systems primarily focus on results:
Working directly with each pixel: we can
observe a high sensitivity to distortions due to
the change of point of view, as well as contrast
and illumination changes.
The presence of edges in the windows of
correlation leads to false matches, since the
surfaces are intermittent or in a hidden image
has an edge over another.
Are closely tied to the epipolar constraints (D.
Papadimitriou, 1996).
Therefore, area-based stereo vision techniques
look for cross correlation intensity patterns in the
local vicinity or neighbourhood of a pixel in an
image, with intensity patterns in the same
neighbourhood for a pixel of another image. Thus,
area-based techniques use the intensity of the pixels
as an essential characteristic.
2.2 Features-based Matching
Algorithms
As opposed to area-based techniques, the features-
IMAGE MATCHING ALGORITHMS IN STEREO VISION USING ADDRESS-EVENT-REPRESENTATION - A
Theoretical Study and Evaluation of the Different Algorithms
81
based techniques need an image pre-processing
before the image matching process. This pre-
processing consists of a feature extraction stage from
both images, resulting in the identification of
features of each image. In turn, some attributes have
to be extracted to be used in the matching process.
Thus, this step is closely linked to the matching
stage in those matching algorithms based on features
because without this step, we would not have
enough information to make inferences and obtain
the image correlation.
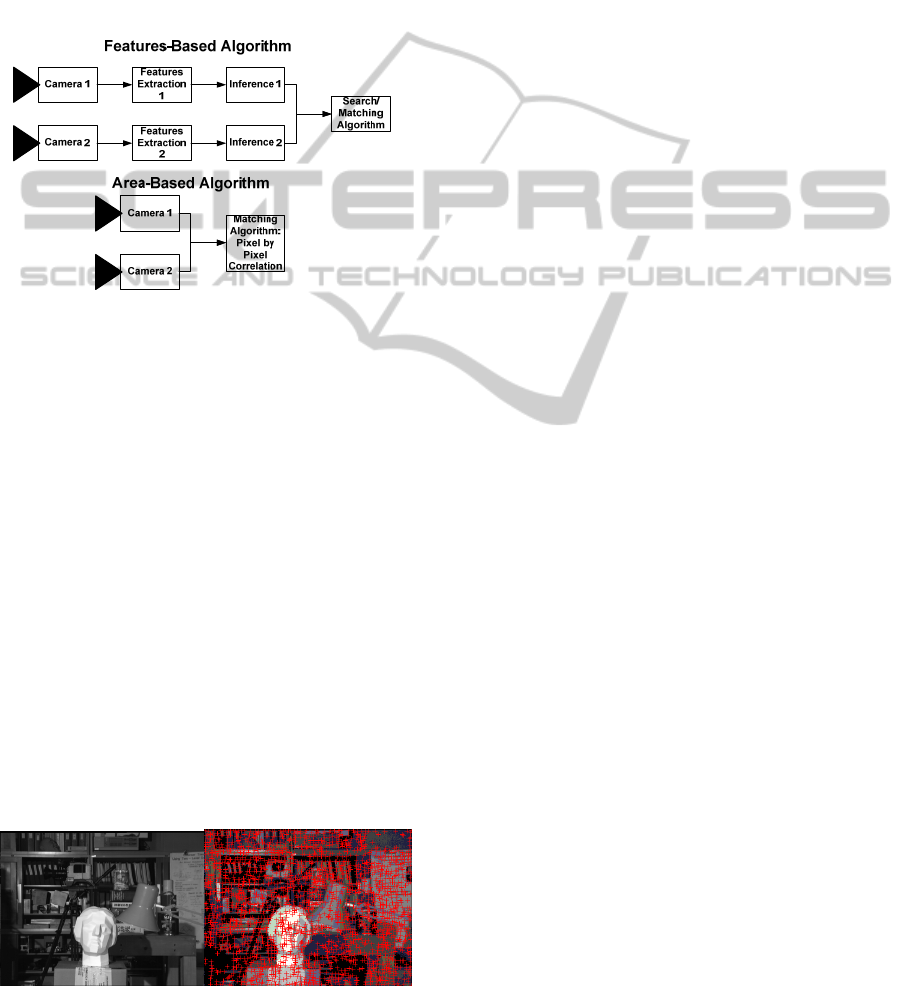
Figure 4: Area-based and features-based algorithms.
For features-based stereo vision, symbolic
representations are taken from the intensity images
rather unless of directly using the intensities. The
most widely used features are: breakpoints isolated
chains of edge points or regions defined by borders.
The three above features make use of the edge
points. It follows that the end points used as
primitives are very important in any stereo-vision
process and, consequently, it is common to extract
the edge points of images. Once the relevant points
of edge have been extracted (as shown in figure 5),
some methods use arrays of edge points to represent
straight segments, not straight segments, closed
geometric structures which form geometric
structures defined or unknown.
Aside from the edges, the regions are another
primitive that can be used in the stereo-vision
process. A region is an image area that is typically
associated with a given surface in the 3D scene and
is bounded by edges.
Figure 5: Edge detections in a features-based algorithm.
With the amount of features and depending on
the matching method that will be used, an additional
segmentation step may be necessary. In this step,
additional information would be extracted from the
known features. This information is calculated based
on inferences from the known characteristics. Thus,
the matching algorithm that receives the inferred
data possess much more information than the
algorithm that works directly on the pixel intensity.
Once the algorithm has both vectors with the
inferred features from the two images, it searches in
the vectors looking for similar features. The
matching algorithm is limited to a search algorithm
on two features sets. We can say that the bulk of
computation corresponds to the feature extraction
algorithm and the inference process.
The main advantages of these techniques are:
Better stability in contrast and illumination
changes.
Allow comparisons between attributes or
properties of the features.
Faster than area-based methods since there are
fewer points (features) to consider, although
require pre-processing time.
More accurate correspondence since the edges
can be located with greater accuracy.
Less sensitive to photometric variations as they
represent geometric properties of the scene.
Focus their interest on the scene that has most
of the information.
Despite these advantages, features-based
techniques have two main drawbacks, which are
easily deduced from the characteristics described
above. The first drawback is the high degree of
dependence on the chosen primitives of these
techniques. This can lead to low quality or unreliable
results if the chosen primitives are not successful or
are not appropriate for these types of images. For
example, in a scene with few and poorly-defined
edges, delimiters would not be advisable to select
regions as primitive.
Another drawback is derived from the
characteristics of the preprocessing stage. We
described this step as a feature extraction mechanism
of the two images and the inference or properties of
the highest level in each of them. As stated above,
there is a high computational cost associated to this
pre-processing stage, to the point that using digital
cameras with existing high-level algorithms running
on powerful machines cannot match the real time
processing.
SIGMAP 2011 - International Conference on Signal Processing and Multimedia Applications
82

3 REAL-TIME SPIKES-BASED
MATCHING ALGORITHM
We have seen two major lines of research about
image matching algorithms for digital systems.
Area-based matching algorithms: very focused
on speed, without using pre-processing and with
low efficient results.
Features-based matching algorithms: more
focused on getting good results at the expense of
a pre-processing and inference phases, resulting
in a higher latency.
As a first approximation, we could consider
making an adaptation of the features-based
algorithms to obtain a consistent algorithm with
good results. However, in this case we have a lot of
problems mainly derived from the early stages of
pre-processing and inference. In order to define an
algorithm that is feasible in our system we have to
take into account its features and the goals we want
to achieve.
In the introduction we mentioned AER systems,
motivations, current development and research lines
related to them. Our main goal is to design and build
an autonomous and independent system that works
in real time basis, with no need to use a computer to
run high-level algorithms. The efficiency of our
system is not as important as real-time processing.
Although we sacrifice quality in the results, we
cannot afford to perform pre-processing and
inference stages, which slow down our system
making the real-time processing impossible.
Moreover, due to the independence requirement, a
computer cannot be used to run high level
algorithms.
The information in an AER system is a
continuous flow that cannot be stopped: the
information can only be processed or discarded.
Each spike is transmitted by a number of
communication lines, and contains information from
a single pixel. Moreover, the intensity of a pixel
dimension is encoded in the spike frequency
received from that particular pixel. The AER retinas
used by research groups are up to 128x128 tmpdiff
resolution, which means that measure brightness
changes over time. Thus, taking a load of 10% in the
intensity of the pixels, we would be in the range of
more than four hundred thousand pulses to describe
the current state of the scene with a single retina.
This is too much information to be pre-processed.
We want our system to be independent and based
on an FPGA connected to the outputs of two AER
retinas. The FPGA processes the information using
the proposed algorithm and transmits the resulting
information using a parallel AER bus to an
USBAERmini2 PCB (R. Berner, 2007). This is
responsible for monitoring AER traffic received and
transmitted by USB from and to a computer. Should
be noted that we just use the computer to verify the
algorithm running on the FPGA works as required,
the computer itself is not used to process any
information.
Taking into account the digital algorithms, the
second option is to use a variant of the area-based
matching algorithms (T. Tuytelaars, 2000). In this
case, the topic to consider would be the results
because, as discussed above, these algorithms do not
require preprocessing but not ensure result
reliability.
Among the problems related to the area-based
matching algorithms, AER retinas include failures
caused by variations in the brightness and contrast.
This involved the properties of AER retinas we use,
which do not show us all the visual information it
covers, but the information they send is the spatial
derivative in time. This means that we appreciate the
information only for moving objects, while the rest
of non-mobile environment is not "seen". In
addition, these retinas have very peculiar
characteristics related to information processing.
These characteristics make them immune to
variations in brightness and contrast (lightness and
darkness does not interfere with transmitted
information). With this retina property managed to
avoid the major drawback of area-based algorithms.
Our proposed algorithm is linked to the information
received from the AER bus. It also inherits similar
properties from area-based algorithms, but adapted
to the received information. We propose an
algorithm able to run in a standalone environment in
a FPGA, which receives traffic from two AER
retinas through a parallel bus.
We will count the received spikes for each pixel
of the image and store this information in a table. So
that, we have pixel intensity measures derived from
the moving objects detected by each retina at every
moment. The algorithm will mainly find
correspondences between the two tables of spike
counters. Given that, there are two problems
involving the algorithm and the properties of AER
retinas.
A major issue about the retinas is their unique
properties (AER output frequency, firing intensity
threshold of the pixels, etc) of each retina and its
BIAS setting. Thus, the information of the same
pixel in both retinas is not sent at the same time and
there could be a frequency variation between both of
them. To prevent this, we propose a fuzzy matching
algorithm which will not seek exactly the same
levels of intensity, but would admit an error in the
IMAGE MATCHING ALGORITHMS IN STEREO VISION USING ADDRESS-EVENT-REPRESENTATION - A
Theoretical Study and Evaluation of the Different Algorithms
83
range of 5 and 8% of these levels (in our case, with
256 intensity levels, we would admit a 12-20 levels
error. G.Pajares, 2006).
The first problem is solved, but we will have a
very inefficient algorithm if we use pixel by pixel
matching. To solve it, we use the principles of area-
based matching algorithms. So we do not limit
ourselves to one pixel correspondence search, but
search within a window of variable width, which
will conduct the correspondence of each pixel in the
window. To emphasize, the correspondence between
each pair of pixels from both retinas will be done
separately using the fuzzy matching algorithm
explained above (G.Pajares, 2006).
Another feature that improves the algorithm
efficiency is what we name the “re-dog” (reset-dog).
It is a process that resets the internal counters of the
pixel intensity measures from time to time to avoid
counters overflow.
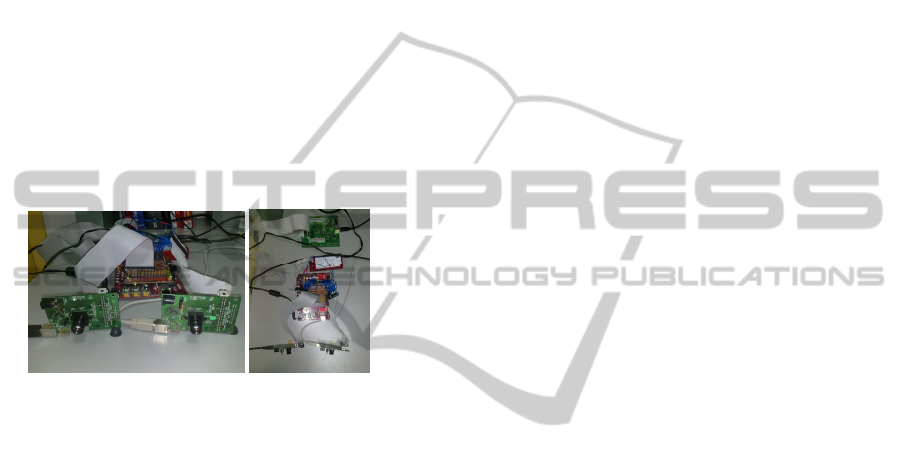
Figure 6: Virtex-5 with AER retinas and USBAERmini2.
To improve the efficiency of the search for
correspondences, we can divide the image into
quadrants, so our program has different threads to do
correlation within each quadrant, but also has a
problem related to the objects being placed between
various quadrants. At present we have implemented
the matching algorithm in a Virtex-5 FPGA model.
We have connected to this board the two inputs from
the AER retinas and it has an output to an
USBAERmini2 PCB (R. Berner, 2007), which is
responsible for monitoring traffic and send it to the
computer using the USB bus (as shown in figure 6).
We are now testing the algorithm.
This work is within the Spanish national project
VULCANO, and will be used for calculating the
distance to the object and, on this basis, controls a
robotic arm that interacts with those objects.
4 CONCLUSIONS
In this paper we have discussed the current trends in
the literature on computer vision, how it has evolved,
step by step to the multi-camera view due to existing
needs. We have analyzed the image matching
algorithms for digital systems, their advantages and
disadvantages.
After this first analysis, we have seen the
problems evolving real-time systems with more than
one camera, especially if the information from two
cameras has to be merged. Because of this, we have
mentioned AER technology as an approach to neuro-
inspired computing. Thus we have named the most
important details of this technology, and its adaptation
to computer vision.
Finally, after identifying the problem and the
means to resolve it, we have proposed an algorithm
that is under test, allowing us to obtain information
from two AER retinas and process information from
both of them, so we can get an image matching
algorithm as close as possible to real-time processing
with an acceptable efficiency.
ACKNOWLEDGEMENTS
This work has been supported by Spanish government
grant VULCANO (TEC2009-10639-C04-02) and the
European project CARDIAC (FP7-248582).
REFERENCES
G. M. Shepherd, 1990. The Synaptic Organization of the
Brain. Oxford University Press, 3rd Edition.
J. Lee, 1981. A Simple Speckle Smoothing Algorithm for
Synthetic Aperture Radar Images. Man and
Cybernetics, vol. SMC-13.
T. Crimmins, 1985. Geometric Filter for Speckle Reduction.
Applied Optics, vol. 24, pp. 1438-1443.
D. Papadimitriou, T. Dennis, 1996. Epipolar line estimation
and rectification for stereo image pairs. IEEE Trans.
Image Processing, 5(4):672-676.
S. B. Pollard, et al, 1985. PMF: a stereo correspondence
algorithm using a disparity gradient limit. Perception,
14:449-470.
S. T. Barnard, M. A. Fischler, 1982. Computational Stereo.
Journal ACM CSUR. Volume 14 Issue 4.
G. Pajares et al, 2006. Fuzzy Cognitive Maps for
stereovision matching. Pattern Recognition, 39, 2101-
2114.
R. Berner et al. In ISCAS’07, A 5 Meps $100 USB2.0
Address-Event Monitor-Sequencer Interface.
A. Linares-Barranco et al. In ISCAS’10, AER Convolution
Processors for FPGA.
B. Cope et al, 2006. Implementation of 2D Convolution on
FPGA, GPU and CPU. Imperial College Report.
B. Cope et al. In FPT’05, Have GPUs made FPGAs
redundant in the field of video processing?
M. Sivilotti, 1991. Wiring Considerations in analog VLSI
Systems with Application to Field-Programmable
Networks. Ph.D. Thesis, Caltech.
T. Tuytelaars et al. In BMVC’00 Wide baseline stereo
matching based on local, affinely invariant regions.
SIGMAP 2011 - International Conference on Signal Processing and Multimedia Applications
84
