
ON MAXIMAL ROBUSTLY POSITIVELY INVARIANT SETS
Hoai Nam Nguyen, Sorin Olaru and Florin Stoican
SUPELEC Systems Sciences (E3S) - Automatic Control Department, Gif-sur-Yvette, France
Keywords:
Invariant set, Maximal robustly positively invariant set, Constrained control, Discrete linear system.
Abstract:
This paper addresses the problem of computing maximal robustly positively invariant sets for discrete-time
linear time-invariant systems with disturbance inputs. It is assumed that the disturbance is unknown, additive,
but bounded. The main contribution is the determination of bound of the number of steps in the iterative
construction of the maximal invariant sets.
1 INTRODUCTION
Set invariance plays a fundamental role in the analy-
sis and design of control systems for constrained sys-
tems, since if the initial state is contained inside an
invariant set, all future states will stay within the set
and hence will satisfy the imposed system constraints,
(Blanchini, 1999).
In literature, two types of convex sets are essen-
tially used as candidate invariant sets: ellipsoidal and
polyhedral sets. The use of ellipsoidal sets has the
advantage that the complexity is fixed, (Kurzhanski
and Varaiya, 2000), (Kurzhanski and Varaiya, 2002).
However, they have a rather restricted shape, which
may be very conservative in typical problems.
In this paper we will focus only on polyhedral sets
in conjunction with linear dynamics.
The construction of maximal robustly positively
invariant set for linear time-invariant (LTI) systems
was studied in literature in different contexts, see
for example the study in (Kolmanovsky and Gilbert,
1998). The method, proposed in this early studies
constructs an invariant set by iteratively adding ad-
ditional constraints until invariance is obtained. How-
ever, the iterative number is unknown in advance and
can be very large.
In this paper we provide a novel method for con-
structing maximal robustly positively invariant sets
for LTI systems that does not suffer from these draw-
backs. Based on forward reachable sets, the method
provides additional insight for a better understanding
of the properties of the maximal robustly positively
invariant sets. We will also discuss a method for com-
puting an a priori lower bound relevant to the pro-
posed method.
From literature, only the work in (Rakovic et al.,
2004) proposed a method for determining an upper
bound of the number of steps in the iterative con-
struction of the maximal invariant sets. The method
presented in the current paper offers a slight improve-
ment for this upper bound.
The following notation will be used throughout
the paper. N , {0, 1, 2, . . .} denotes the set of non-
negative integers, N
+
denotes the set N \ 0 and N
s
,
{0, 1, 2, . . . , s − 1}. Whenever time is unspecified, a
variable x stands for x(k) for some k ∈ N.
For some ε > 0 we denote B
n
p
(ε) = {x ∈ R
n
:
kxk
p
≤ ε}, where kxk
p
is the p−norm of the vector
x = [x
1
x
2
. . . x
n
]
T
, i.e. kxk
p
= (|x
1
|
p
+ |x
2
|
p
+ . . . +
|x
n
|
p
)
1
p
.
Given two sets X
1
⊂ R
n
and X
2
⊂ R
n
, the
Minkowski sum of the sets X
1
and X
2
is defined by
X
1
⊕X
2
, {x
1
+x
2
| x
1
∈ X
1
, x
2
∈ X
2
}. The Pontryagin
difference of the set X
1
with respect to X
2
is defined
by X
1
⊖ X
2
= {x| x + x
2
∈ X
1
, for all x
2
∈ X
2
}.
The set X
1
is a proper subset of the set X
2
if and
only if X
1
lies strictly inside X
2
.
A C-set is a convex and compact set containing
the origin as an interior point.
A polyhedron, or a polyhedral set, is the intersec-
tion of a finite number of half spaces. A polytope is a
closed and bounded polyhedral set.
The paper is organized as follows. Section 2 deals
with a general framework of robustly positively in-
variant sets. Section 3 is concerned with the mini-
mal robustly positively invariant set while Section 4
is concerned with the maximal robustly constraint-
admissible set. Section 5 is dedicated to the problem
of computing an a priori lower bound. The simulation
300
Nam Nguyen H., Olaru S. and Stoican F..
ON MAXIMAL ROBUSTLY POSITIVELY INVARIANT SETS.
DOI: 10.5220/0003535203000305
In Proceedings of the 8th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2011), pages 300-305
ISBN: 978-989-8425-74-4
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

results are evaluated in Section 6 before drawing the
conclusions.
2 ROBUSTLY POSITIVELY
INVARIANT SET
Consider the following discrete-time linear time-
invariant system:
x(k+ 1) = Ax(k) + ω(k) (1)
where x(k) ∈ R
n
and ω(k) ∈ R
n
.
The state is subject to the following polytopic con-
straint:
x ∈ X (2)
where X = {x|H
x
x ≤ K
x
} is a C-set.
We assume that the disturbance sequence ω satis-
fies the constraint:
ω ∈ W (3)
where W = {ω|H
w
ω ≤ K
w
} is a C-set.
Recall the following definitions from (Blanchini
and Miani, 2008):
Definition 1 (RPI Set). The set Ω is robustly pos-
itively invariant (RPI) for system (1) if and only if
Ax+ ω ∈ Ω for all ω ∈ W and all x ∈ Ω. Equivalently
Ω is RPI if and only if AΩ ⊕W ⊆ Ω.
Definition 2 (mRPI). The set F
∞
is minimal RPI
(mRPI) if it is a RPI set and contained in any RPI
set.
It is well known that if the matrix A is not strictly
stable, then F
∞
is unbounded. Therefore, in the se-
quel, we consider only the case when A is strictly sta-
ble.
It is also known that, the mRPI set is unique, com-
pact and - in the case when W contains the origin -
contains the origin.
Definition 3 (MRPI). The set O
∞
is maximal RPI
(MRPI) if it is a RPI set and contains every RPI set
under a set of constraints (2), (3).
If the MRPI set is non-empty, then it is unique.
Furthermore if X is a C set then the MPRI set is also
a C set.
The link between the mRPI set F
∞
and the MRPI
set O
∞
is given by the following theorem ((Kol-
manovsky and Gilbert, 1998)):
Theorem 1. The following statements are equivalent:
1. the MRPI set O
∞
is non-empty,
2. F
∞
⊂ X,
3. X ⊖ F
∞
contains the origin, where ⊖ denotes the
Pontryagin difference.
Proof. The proof is not reported here. The reader is
referred to (Kolmanovskyand Gilbert, 1998) for more
details.
Definition 4 (RAS). A set Ω is a robustly constraint-
admissible set (RAS) for system (1) if and only
if A
k
x + A
k−1
ω(0) + A
k−2
ω(1) + . . . + ω(k − 1) ∈
X, ∀k ∈ N for all ω ∈ W and all x ∈ Ω. Furthermore
if Ω contains every robustly constraint-admissible set
then Ω is a maximal robustly constraint-admissible
set (MRAS).
Theorem 2. The set Ω is a MRAS for system (1) if
and only if this set is a MRPI set.
Proof. If Ω is MRPI and contained in X, then Ax +
ω ∈ Ω ⊆ X for any ω ∈ W and x ∈ Ω. Hence Ω is a
robustly constraint-admissible set, so Ω is contained
in a MRAS.
Conversely, Ω is a MRAS. One has A
2
Ω ⊕ AW ⊕
W ⊆ X or A(AΩ ⊕ W) ⊕ W ⊆ X or AΩ
1
⊕ W ⊆ X,
where Ω
1
= AΩ ⊕ W. That means Ω
1
is a RAS.
Hence, Ω
1
⊆ Ω or in another words, Ω is robustly
invariant set and contained in the MRPI set.
From the above theorem, one can conclude that
the problem of finding MRPI sets is equivalent to the
problem of finding MRAS. Therefore, in the rest of
the paper, we consider only the problem of finding
the MRAS for a given linear dynamics.
3 MINIMAL ROBUSTLY
POSITIVELY INVARIANT SET
This section addresses the problem of approximating
a mRPI.
It can be shown that in (Rakovic et al., 2005) the
mRPI set F
∞
is the limit set of all the possible trajec-
tories of (1) and defined as:
F
∞
=
∞
∑
i=0
A
i
W
Since F
∞
is a Minkowski sum of infinitely many
terms, its exact computation can be assured only un-
der restrictive assumptions of nilpotent system dy-
namics, (Mayne and Schroeder, 1997).
Recall the following definition:
Definition 5 (mRPI ε−approximation). Given a
scalar ε > 0 and a set Ω ⊂ R
n
, the set Φ ⊂ R
n
is an
outer ε−approximation of Ω if
Ω ⊆ Φ ⊆ Ω ⊕ B
n
p
(ε) (4)
and an inner ε−approximation of Ω if
Φ ⊆ Ω ⊆ Φ ⊕ B
n
p
(ε) (5)
ON MAXIMAL ROBUSTLY POSITIVELY INVARIANT SETS
301

Figure 1: Approximation of F
∞
for example 1.
Denote
F
k
=
k−1
∑
i=0
A
i
W
Theorem 3. If the set W contains the origin in its
interior, then there exists a finite integer r ∈ N
+
and a
scalar ε ∈ (0, 1] that satisfies:
A
r
W ⊆ εW (6)
If (6) is satisfied, then
F(ε, r) = (1− ε)
−1
F
r
(7)
is a convex, compact, RPI set of (1). Furthermore
F(ε, r) and F
∞
⊂ F(ε, r).
Proof. The proof is omitted here. The reader is re-
ferred to (Rakovic et al., 2005) for more details on
this topic.
4 MAXIMAL ROBUSTLY
CONSTRAINT-ADMISSIBLE
SET
In this section we consider the problem of the exact
computation of the MRAS and start with the assump-
tion that the mRPI set F
∞
is a proper subset of X.
Remark 1. The assumption F
∞
⊂ X is uncheckable but
practically realistic by the fact that once we have an
outer approximation, we can verify its inclusion in X.
Define the set Ω(s) by:
Ω(s) =
x
{x} ⊆ X
{Ax} ⊕W ⊆ X
. . .
{A
s−1
x} ⊕
s−2
M
k=0
A
k
W ⊆ X
(8)
Theorem 4. There exists an index s that satisfies:
A
s
X ⊕ A
s−1
W ⊕ A
s−2
W ⊕ . . . ⊕W ⊆ X (9)
and the set Ω(s) defined in (8) is a MRAS for system
(1).
Proof. One has
A
s
X ⊕
s−1
M
k=0
A
k
W ⊆ A
s
X ⊕
∞
M
k=0
A
k
W ⊆ A
s
X ⊕ F
∞
(10)
The fact that A is strictly stable and F
∞
is a proper
subset of X confirm the existence of the index s by
the fact that there will always an integer which makes
A
s
X arbitrarily small.
For the second part of theorem, if t ∈ N
s
=
{0, 1, . . . , s− 1}, by the definition of the set Ω(s), for
any x ∈ Ω(s) and any w(k) ∈ W for k = 0, 1, . . . ,t − 1
one has
A
t
x⊕
t−1
M
k=0
A
k
w(k) ∈ X (11)
If t ∈ N and t ≥ s, it is possible to find a pair p ∈ N,
p ≥ 1 and q ∈ N
s
= {0, 1, . . . , s−1} such that t = ps+
q. Denote Ψ = A
t
Ω(s) ⊕
t−1
M
k=0
A
k
W, it follows that:
Ψ = A
ps+q
Ω(s) ⊕
ps+q−1
M
k=0
A
k
W
= A
ps
{A
q
Ω(s) ⊕
q−1
M
k=0
A
k
W} ⊕
ps−1
M
k=0
A
k
W
⊆ A
ps
X ⊕
ps−1
M
k=0
A
k
W
= A
(p−1)s
{A
s
X ⊕
s−1
M
k=0
A
k
W} ⊕
(p−1)s−1
M
k=0
A
k
W
⊆ A
(p−1)s
X ⊕
(p−1)s−1
M
k=0
A
k
W
. . .
= A
s
X ⊕
s−1
M
k=0
A
k
W
⊆ X
Thus, for every t ∈ N, one has A
t
Ω(s) ⊕
t−1
M
k=0
A
k
W ⊆ X, hence Ω(s) is a constraint-admissible
set. The fact that Ω(s) is a MRAS follows from the
construction of this set.
Clearly, if Ψ is any RPI set such that F
∞
⊂ Ψ ⊂ X
and A
s
X ⊕ Ψ ⊂ X, then the set Ω(s) is a MRAS. This
set Ψ can be obtained upon ultimate bounds in the
case when A has real eigenvalues, for example using
the results provided in the next theorem.
Theorem 5. (Kofman et al., 2007) Consider the sys-
tem (1), let A = TJT
−1
be the Jordan decomposition
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
302

of A and consider a bounding box for the set W. If
this bounding box is described by the vector
¯
ω which
satisfies |ω| ≤
¯
ω, ∀ω ∈ W then the set:
Ψ = {x
T
−1
x
≤ (I − |J|)
−1
T
−1
¯
ω} (12)
is RPI, and thus contains F
∞
.
Remark 2: Note that for any s
1
and s
2
that verify (9)
one has Ω(s
1
) = Ω(s
2
). One would like to find the
smallest value of s such that (9) holds in order to re-
duce the number of redundant inequalities.
It is clear that, the set Ω(s) can be determined as
follows:
Ω(s) =
x
H
x
H
x
A
.
.
.
H
x
A
s−1
x ≤ K
x
− K
s
(13)
where K
s
is a solution of the following s linear pro-
grams
K
s
= max
ω(0),...,ω(s−1)
0 0 . . . 0
H
x
0 . . . 0
H
x
A H
x
. . . 0
. . . . . .
H
x
A
s−2
H
x
A
s−3
. . . H
x
ω(0)
ω(1)
.
.
.
ω(s− 1)
subject to
ω(k) ∈ W, k = 0, 2, . . . , s− 1
It is worth noticing that the set Ω(s) = {x|Hx ≤
K} may contain redundant inequalities. One can use
the algorithm in (Kerrigan, 2000) to eliminate these
inequalities.
5 A PRIORI LOWER BOUND
COMPUTATION
In this section we will consider the problem of find-
ing the smallest value of s such that the condition (9)
holds.
5.1 The Theoretical Principle
One has
F
∞
=
L
∞
k=0
A
k
W =
L
s−1
k=0
A
k
W ⊕
L
∞
k=s
A
k
W
=
L
s−1
k=0
A
k
W ⊕ A
s
F
∞
then
X ⊖ F
∞
= X ⊖ (
L
s−1
k=0
A
k
W ⊕ A
s
F
∞
)
⊇ (X ⊖
L
s−1
k=0
A
k
W) ⊖ A
s
F
∞
⊇ A
s
X ⊖ A
s
F
∞
⊇ A
s
(X ⊖ F
∞
)
(14)
Let X
1
= X ⊖ F
∞
= {x|H
1
x
x ≤ K
1
x
}, it follows that
A
s
X
1
⊆ X
1
, so our problem is reduced to find the index
s such that A
s
X
1
⊆ X
1
.
Remark 3: Indeed, we obtain only bounds and not the
exact index due to the fact that Pontryagin difference
and Minkowski addition are not commutative opera-
tions.
Remark 4: Using the result in (Rakovic et al., 2004)
an alternative upper bound r is obtained by exploiting
the following set inclusion:
A
r
X ⊆ X ⊖ F
∞
It is clear that the bound in (14) represents an im-
provement with respect to the result in (Rakovic et al.,
2004) by the fact that X ⊖ F
∞
⊆ X.
5.2 Numerical Construction
Let p
l
(k) and p
r
(k) be solutions of following 2n linear
programs:
p
l
(k) = minx
k
s.t. H
1
x
x ≤ K
1
x
,
(15)
and
p
r
(k) = min−x
k
s.t. H
1
x
x ≤ K
1
x
,
(16)
Define matrices R
out
and R
in
as follows:
R
out
=
R
o
(1) 0 . . . 0
0 R
o
(2) . . . 0
.
.
.
.
.
.
.
.
.
.
.
.
0 0 . . . R
o
(n)
(17)
where R
o
(k) = max(
p
l
(k)
, |p
r
(k)|), k = 1, 2, . . . , n,
and
R
in
=
R
i
(1) 0 . . . 0
0 R
i
(2) . . . 0
.
.
.
.
.
.
.
.
.
.
.
.
0 0 . . . R
i
(n)
(18)
where R
i
(k) = min(
p
l
(k)
, |p
r
(k)|), k = 1, 2, . . . , n.
A set Φ
out
defined as
Φ
out
= {x ∈ R
n
|x = R
out
d, kdk
∞
≤ 1} (19)
is the smallest orthotope that contains X
1
.
And a set Φ
in
defined as
Φ
1
in
= {x ∈ R
n
|x = R
1
in
d, kdk
∞
≤ 1} (20)
is the biggest orthotope that is contained in X
1
.
In the case, when matrix A is not diagonizable, one
can use the following algorithm to find the smallest
index s such that A
s
X
1
⊆ X
1
.
Consider the case when matrix A is diagonizable
with A = TJT
−1
, where T is a nonsingular matrix, J
ON MAXIMAL ROBUSTLY POSITIVELY INVARIANT SETS
303

Algorithm 1: Computation of the smallest index.
The case when matrix A is not diagonizable.
Input: X
1
, A
Output: s
o
2. Set s = 1 ;
3. if A
s
X
1
⊆ X
1
then
Set s
o
= s and stop
else
Continue
end
4. Set s = s+ 1 and go to step 3.
is a diagonal matrix of the eigenvalues of A and the
spectral radius ρ(A) ∈ (0, 1). It is clear that if A
s
x ⊆
Φ
in
for any x ∈ Φ
out
then A
s
x ∈ X
1
for any x ∈ X
1
. It
follows that
A
s
Φ
out
⊆ Φ
1
in
⇒ A
s
R
out
d ⊆ Φ
1
in
, kdk
∞
≤ 1
⇒ |A
s
|
1
≤ α, α = min
R
1
in
(i,i)
R
out
(i,i)
, i=1, 2, . . . , n
⇒ |T|
1
T
−1
1
ρ
s
≤ α
⇒ s ≥
ln(α)−ln(|T|
1
|
T
−1
|
1
)
ln(ρ)
Denoting ⌈s⌉ the smallest integer greater or equal
to s, the set inclusion A
s
X
1
∈ X
1
is satisfied for every
s such that s ≥ s
∗
, where:
s
∗
=
&
ln(α) − ln(|T|
1
T
−1
1
)
ln(ρ)
'
(21)
It is clear that this s
∗
may be not the smallest in-
teger such that A
s
X ⊕
s−1
M
i=0
A
i
W ⊆ X holds. To the best
of our knowledge, there is no effective method to de-
termine analytically such s. One may use a bisection
method for computing the smallest s, as follows:
Algorithm 2: Computation of the smallest index.
Input: s
∗
, X, W, A
Output: s
o
2. Set s
1
= 0, s
2
= s
∗
;
3. Set s = ⌈
s
1
+s
2
2
⌉ ;
4. if A
s
X ⊕
s−1
M
k=1
A
k
W ⊆ X then
set s
2
= s
else
s
1
= s
end
5. if s
2
− s
1
= 1 then
set s
o
= s
2
and stop
else
go to step 3
end
Remark 5. The condition A
s
X ⊕
s−1
M
k=1
A
k
W ⊆ X can be
verified by solving the following linear programs:
J = max{H
x
A
s
x+ H
x
A
s−1
ω(0) + . . . + H
x
ω(s− 1)}
s.t. x ∈ X
ω(i) ∈ W, i = 1, 2, . . . , s− 1
and after that checking condition J ≤ K
x
.
6 EXAMPLES
To show the effectiveness of the proposed method,
two examples will be considered in this section. For
both of these examples, to solve linear programs, we
used the Multi-parametric toolbox, (Kvasnica et al.,
2004).
6.1 Example 1
This example is taken from (Rakovic and Fiacchini,
2008). Consider the following discrete-time linear
time-invariant system:
x(k+ 1) = Ax(k) + ω(k) (22)
where
A = 0.9
cos(θ) sin(θ)
−sin(θ) cos(θ)
=
0.8916 0.1225
−0.1225 0.8916
with θ =
π
3
and
X = {x ∈ R
2
|kxk
∞
≤ 100} ∩ {x ∈ R
2
|x
2
≥ −20}.
(23)
The disturbance set is
W = {ω ∈ R
2
|kωk
∞
≤ 0.01} (24)
Figure 1 presents the disturbance set W and the
RPI set obtained by using theorem 3.
Using algorithm 1, one obtains s
o
= 19.
Figure 2 shows the maximal robustly positivelyin-
variant set O
∞
.
Figure 2: the MRPI set O
∞
for example 1.
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
304
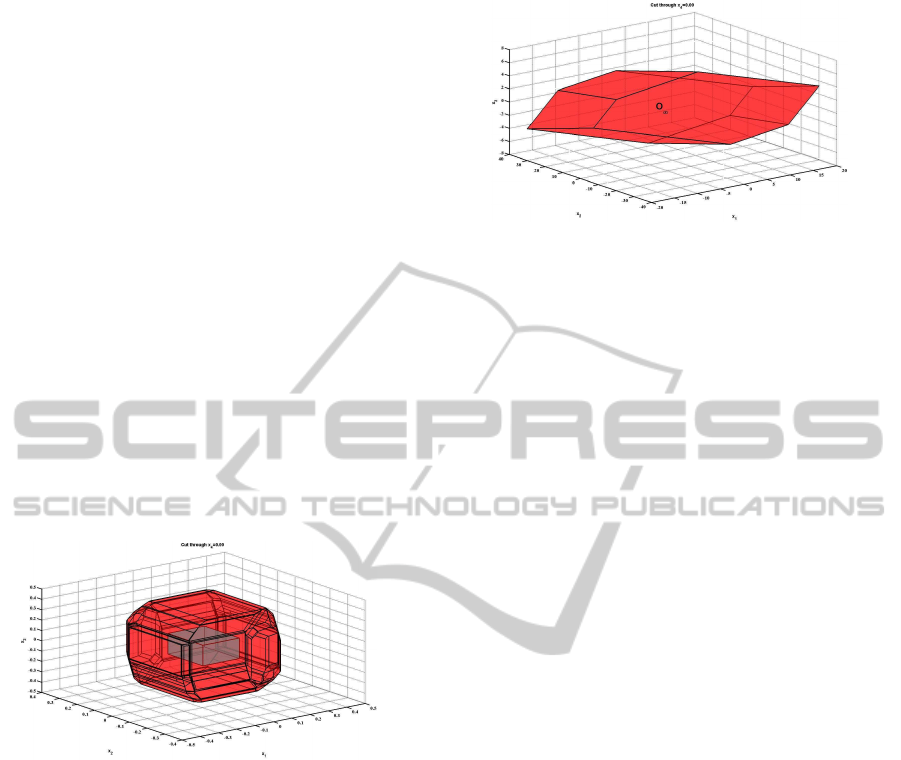
6.2 Example 2
To show the ability of the algorithm to cope efficiently
with a higher order systems, we will use a 4th order
system in this example.
Consider the following discrete-time linear time-
invariant system:
x(k+ 1) = Ax(k) + ω(k) (25)
where
A =
0.5042 0.0618 0.6935 0.1406
0.3070 0.1811 0.4636 −0.0106
−0.4748 −0.0911 0.1162 0.1502
0.1940 0.0771 0.6828 0.3539
and
X = {x ∈ R
4
| kxk
∞
≤ 50} ∩ {x ∈ R
4
|
4
∑
i=1
x
i
≤ 10}
The disturbance set is
W = {ω ∈ R
4
| kωk
∞
≤ 0.1}
Using theorem 3, Figure 3 illustrates the distur-
bance set W and the RPI set with ε = 0.32 and r = 4.
Figure 3: Approximation of F
∞
for example 2, cut through
x
4
= 0.
Using algorithm 1, one obtains s
o
= 7.
Figure 4 illustrates the maximal robustly posi-
tively invariant set O
∞
.
7 CONCLUSIONS
This paper discussed the characterization of the maxi-
mal robustly positively invariant sets for discrete-time
linear time-invariant systems with disturbance inputs
by providing upper bounds for the iterative construc-
tion.
It was shown that the maximal robustly positively
invariant set and the maximal robustly constraint-
admissible set are the same. Examples of a second
order plant, and a fourth order plant are given.
The simulation results show the effectiveness of
the proposed methods.
Figure 4: The maximal robustly positively invariant set for
example 2, cut through x
4
= 0.
REFERENCES
Blanchini, F. (1999). Set invariance in control* 1. Automat-
ica, 35(11):1747–1767.
Blanchini, F. and Miani, S. (2008). Set-theoretic methods in
control. Springer.
Kerrigan, E. (2000). Robust constraint satisfaction: Invari-
ant sets and predictive control. Department of Engi-
neering, University of Cambridge, UK.
Kofman, E., Haimovich, H., and Seron, M. (2007). A
systematic method to obtain ultimate bounds for per-
turbed systems. International Journal of Control,
80(2):167–178.
Kolmanovsky, I. and Gilbert, E. (1998). Theory and com-
putation of disturbance invariant sets for discrete-time
linear systems. Mathematical Problems in Engineer-
ing, 4(4):317–363.
Kurzhanski, A. and Varaiya, P. (2000). Ellipsoidal tech-
niques for reachability analysis: internal approxima-
tion* 1. Systems & Control Letters, 41(3):201–211.
Kurzhanski, A. and Varaiya, P. (2002). On ellipsoidal tech-
niques for reachability analysis. part i: External ap-
proximations. Optimization methods and software,
17(2):177–206.
Kvasnica, M., Grieder, P., Baotic, M., and Morari, M.
(2004). Multi-parametric toolbox (MPT). Hybrid Sys-
tems: Computation and Control, pages 121–124.
Mayne, D. and Schroeder, W. (1997). Robust time-optimal
control of constrained linear systems. Automatica,
33(12):2103–2118.
Rakovic, S. and Fiacchini, M. (2008). Invariant Approx-
imations of the Maximal Invariant Set or Encircling
the Square. In IFAC World Congress, Seoul, Korea.
Rakovic, S., Kerrigan, E., Kouramas, K., and Mayne, D.
(2004). Invariant approximations of robustly posi-
tively invariant sets for constrained linear discrete-
time systems subject to bounded disturbances. De-
partment of Engineering University of Cambridge,
Tech. Rep. CUED/F-INFENG/TR, 473.
Rakovic, S., Kerrigan, E., Kouramas, K., and Mayne, D.
(2005). Invariant approximations of the minimal ro-
bust positively invariant set. IEEE Transactions on
Automatic Control, 50(3):406–410.
ON MAXIMAL ROBUSTLY POSITIVELY INVARIANT SETS
305
