
A NEW PROPOSAL FOR A MULTI-OBJECTIVE TECHNIQUE
USING TRIBES AND SIMULATED ANNEALING
Nadia Smairi, Sadok Bouamama
National School of Computer Sciences, University of Manouba, 2010, Manouba, Tunisia
Khaled Ghedira, Patrick Siarry
High Institute of Management, University of Tunis, Tunis, Tunisia
University of Paris 12, LiSSi, E. A., 3956, Paris, France
Keywords: Particle Swarm Optimization, Tribes, Simulated Annealing, Multi-objective Optimization.
Abstract: This paper proposes a new hybrid multi-objective particle swarm optimizer which incorporates a particle
swarm optimization approach (Tribes) and Simulated Annealing (SA). The main idea of the approach is to
propose a skilled combination of Tribes with a local search technique based on Simulated Annealing
technique. Besides, we are studying the impact of the place where we apply local search on the performance
of the obtained algorithm which leads us to three different versions: applying SA on the archive’s particles,
applying SA only on the best particle among each tribe and applying SA on each particle of the swarm. In
order to validate our approach, we use ten well-known test functions proposed in the specialized literature of
multi-objective optimization. The obtained results show that using this kind of hybridization is justified as it
is able to improve the quality of the solutions in the majority of cases.
1 INTRODUCTION
Problems with multiple objectives present in a great
variety of real-life optimization problems. These
problems are generally involving multiple
contradictory objectives to be optimized
simultaneously. Therefore, the solution is different
from that of a mono-objective optimization problem.
The main difference is that they have a set of
solutions that are equally good. Thus multi-objective
optimization has been extensively studied during the
last decades. Several techniques are proposed: those
which are developed in the operational research field
but with great complexity and those based on meta-
heuristics that find approximate solutions. Among
these meta-heuristics, the Multi-Objective
Evolutionary Algorithms have been considered as
successful to deal with this kind of problems.
In the last years, the PSO is also adopted to solve
these problems, which is the approach considered in
the reported work in this paper. In fact, it consists on
the adaptation of Tribes, a parameter free algorithm
based on PSO to deal with multi-objective problems.
In fact, we propose in this paper, a skilled
combination of Tribes with a local search technique
which is SA in order to provide a more efficient
behaviour and higher flexibility when dealing with
the real world problems: SA is used to cover widely
the solution space and to avoid the risk of trapping in
non Pareto solutions and Tribes is used to accelerate
the convergence. In addition, we study the impact of
the place where we apply local search on the
performance of the algorithm which leads us to three
different versions. In our study, we use ten well-
known multi-objective test functions in order to find
the best one from the proposed techniques and to
justify the use of the local search.
2 TRIBES
2.1 Presentation
Tribes is a PSO algorithm that works in an
autonomous way. Indeed, it is enough to describe
the problem to be resolved and the way of making it
130
Smairi N., Bouamama S., Ghedira K. and Siarry P..
A NEW PROPOSAL FOR A MULTI-OBJECTIVE TECHNIQUE USING TRIBES AND SIMULATED ANNEALING .
DOI: 10.5220/0003538301300135
In Proceedings of the 8th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2011), pages 130-135
ISBN: 978-989-8425-74-4
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

at the beginning of the execution. Then, it is the role
of the program to choose the strategies to be adopted
(Clerc, 2006).
2.2 Tribes Components
The particle informer: A particle A is an
informer of a particle B, if B is capable of
reading the best position visited by A.
The tribe: In the general case, a given particle
A can not inform the rest of the other particles
of the swarm. That’s why we define the tribe,
which is a subset of the swarm, where every
particle is capable of communicating directly
with the rest of the tribe’s particles.
The swarm: it is formed by a set of tribes; each
one is looking to finding a local optimum. A
group of decisions is therefore necessary to
find the global optimum. For this reason, tribes
have to communicate between themselves.
Quality of a particle: The notion of a good or
bad particle is relative to its tribe. We organize
particles, belonging to the same tribe according
to their fitness evaluations. As a result, we can
define the best particle and the worst particle
following every tribe.
Quality of a tribe: to decide if a tribe T is good
or bad, we generate a random number t
between 0 and n (n being the size of T). If the
number of good particles is bigger than t, then
the tribe is considered as a good one.
Otherwise, the tribe is bad.
2.3 Tribe Evolution
The evolution of a tribe involves the removal or the
generation of a particle. The removal of a particle
consists in eliminating a particle without risking the
missing of the optimal solution. For that purpose,
only the good tribes are capable of eliminating their
worst elements. The creation of a particle is made
for bad tribes as they need new information to
improve their situations. However, we note that it is
neither necessary nor desirable to perform these
structural adaptations at each iteration because some
time must be allowed for the information to
propagate among the particles. Several possible rules
can be formulated to ensure this. The rule used is: if
the total number of information links is L after one
structural adaptation, then the next structural
adaptation will occur after L/2 iterations.
2.4 Swarm Move
The only remarkable difference between the
movements of the classic PSO algorithm and those
of Tribes is situated at the level of the probability
distribution of the next position which is modified; it
is D-spherical in the case of Tribes and
D-rectangular in the case of the classic PSO.
2.5 Swarm Evolution
At the beginning, we start with a single particle
forming a tribe. After the first iteration, the first
adaptation takes place and we generate a new
particle which is going to form a new tribe, while
keeping in touch with the generative tribe. In the
following iteration, if the situation of both particles
does not improve, then every tribe creates two new
particles: we form a new tribe containing four
particles. In this way, if the situation deteriorates,
then the size of the swarm grows (creation of new
particles). However, if we are close to an optimal
solution, the process is reversed and we begin to
eliminate particles, even tribes.
3 OUR APPROACH
3.1 Preliminary Study
In the multi-objective case, we have essentially to:
Obtain a set of solution close to the true Pareto
front.
Maintain the diversity within the found set.
For that purpose, several problems are detected:
The choice of the informer of every particle.
The choice of the best performance of every
particle.
A remedy to the fact that Tribes can’t be
considered neither a local search technique nor
a global search one (Bergh, 2002).
The proposed solution to those problems consists in
using the Pareto dominance to respect the
completeness of every objective and to add an
external archive to save the found not dominated
solutions. Furthermore, the hybridization between
Tribes and a local search algorithm can be
considered as a competitive approach to handle
difficult problems of multi-objective optimization.
In order to improve the capacity of exploitation of
Tribes, we apply a local search technique: SA. In
fact, the local search is not going to be inevitably
applied in a canonical way that is on all the particles
A NEW PROPOSAL FOR A MULTI-OBJECTIVE TECHNIQUE USING TRIBES AND SIMULATED ANNEALING
131
of the swarm: we also propose two other manners,
the first one consists in applying the local search
only among the best particle of every tribe. The
second one consists in applying it among the
particles of the archive. We shall have then three
versions of the algorithm.
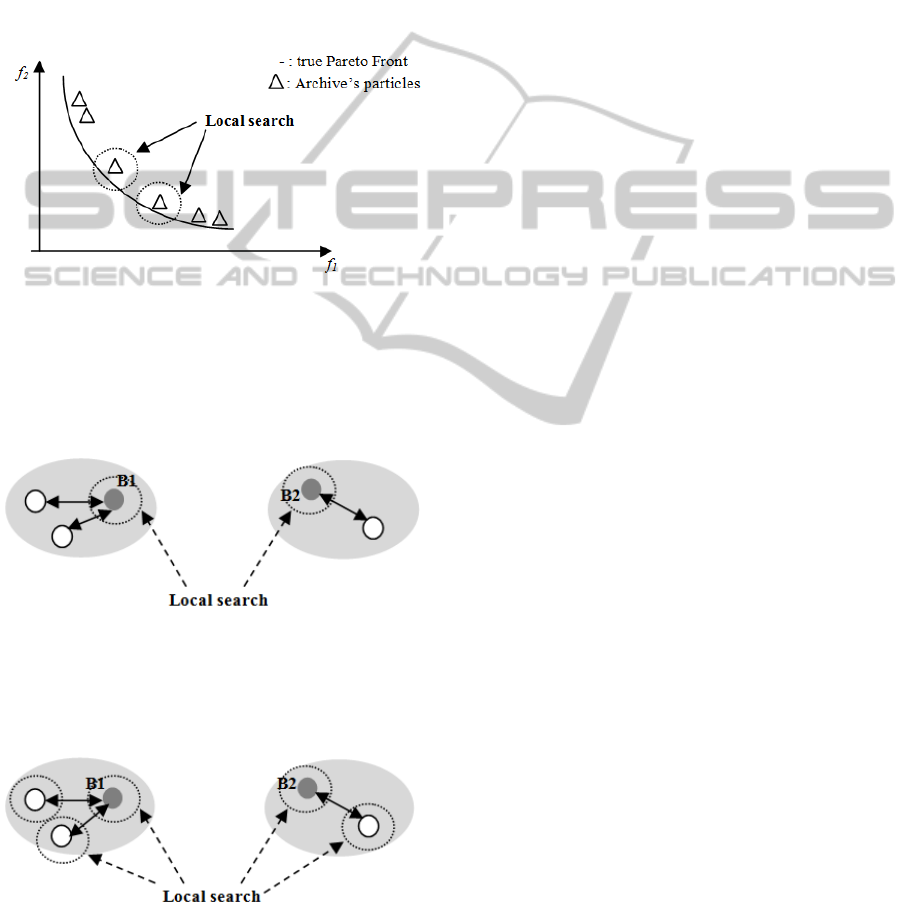
The first one consists in applying the SA only to
the particles of the archive which are situated in the
least crowded zones. Let us note that, in this case,
the local search is not applied unless the archive is
full so that some time is allowed to the information
to propagate in the swarm.
Figure 1: SA-TribesV1.
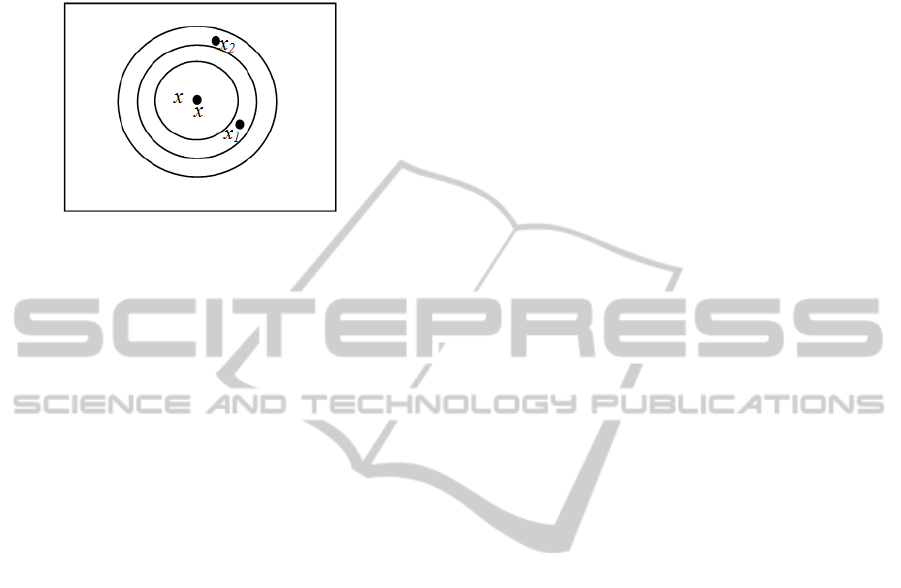
The second version of the algorithm consists in
applying the SA only to the best particles of the
tribes. In fact, we consider that those particles are
situated in promising zones and probably they need
further intensification to find out other solutions.
Figure 2: SA-TribesV2.
The third version consists in applying the SA to
all the particles of the swarm. It is made at the
moment of the swarm adaptation.
Figure 3: SA-TribesV3.
3.2 Updating the External Archive
The update of the archive consists in adding all the
not dominated particles to the archive and deleting
the already present dominated ones. If the number of
particles in the archives exceeds a fixed number, we
apply a crowd function to reduce the size of the
archive and to maintain its variety. Indeed, Crowd
divides the objective space into a set of hypercube.
The role of the function Crowd is to give, for
every particle, the number of particles of the archive
which occupy the same hypercube.
In that case, when the addition of a particle to the
archive creates an overflow, we eliminate the one
who has the highest Crowd.
3.3 Choosing the Particle Informer
The choice of the particle informer is similar to the
case of mono-objective Tribes. Indeed, if we take a
particle which is not the best of its tribe, his guide is
then the best particle of the tribe. If we consider, on
the other hand, the best particle of a given tribe, the
informer is then some random particle from the
archive.
3.4 Hybridizing Tribes with SA
Simulated Annealing (SA) is a local search method
that accepts worsening moves to escape local
optimal. It was proposed originally by Kirkpatrick et
al. (1983), and it is based on an analogy with
thermodynamics, when simulating the cooling of a
set of heated atoms.
For use SA, a method for generation of an initial
solution, a method for generation of neighbouring
solutions and an objective function should be
defined.
However, SA is essentially intended for the
resolution of the combinatorial problems. Few works
considered its adaptation for the continuous
optimization. In our case, we are inspired from the
approach of Chelouah and Siarry (2000). In that
case, this method is similar to the classic SA. The
difference lies essentially in the generation of the
neighbourhood. It is necessary to define first of all a
way to discretize the search space. In fact, the
neighbourhood is defined by using the concept of
“ball”. A ball B(x, r) centered on x (current solution)
with radius r. To obtain a homogeneous exploration
of the space, we consider a set of balls centered on
the current solution x with radius r
0
, r
1
, r
2
,…r
n
.
Hence the space is partitioned into concentric
crowns.
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
132
The n neighbours of x are obtained by random
selection of a point inside each crown C
i
, for i
varying from 1 to n. Finally, we select the best
neighbour x ' even if it is worse than x.
Figure 4: Generating the neighbourhood.
4 EXPERIMENTATIONS AND
RESULTS
4.1 Test Functions
In order to compare the proposed techniques, we
perform a study using ten well-known test functions
taken from the specialized literature on evolutionary
algorithms. These functions present different
difficulties such as convexity, concavity,
multimodality …etc. The detailed description of
these functions was omitted due to space
restrictions. However, all of them are unconstrained,
minimization and have between 3 and 30 decision
variables. Indeed, we fix the maximal size of the
archive to 100 for the two-objective functions and to
150 to the three-objective ones. Moreover, we fix
the maximal number of evaluations in the
experimentations to 5e+4.
4.2 Metrics of Comparison
For assessing the performance of the algorithms,
there are many existent unary and binary indicators
measuring quality, diversity and convergence. In the
literature, there are many proposed combination in
order to perform a convenient study and comparison.
We choose the combination of two binary indicators
that was proposed in (Knowles, Thiele and Zitler,
2006): R indicator and hypervolume indicator.
4.3 Results
In order to validate our approach and to justify the
use of SA, we are going to compare those proposed
techniques against two other PSO-based-multi-
objective approaches representative of the state of
art: Mo-Tribes (Cooren, 2008) and adaptive MOPSO
technique (Zielinski and Laur, 2007). Moreover, we
compare them to multi-objective Tribes without
local search (Tribes-V4) in order to validate the use
of local search.
The binary indicators used to make the
comparison measure both convergence and
diversity. The results regarding the R indicator are
given in table 1 (R can take values between -1 and 1
where smaller values correspond to better results).
The hypervolume difference is given for all test
functions in table 2. Again, smaller values mean
better quality of the results because the difference to
a reference set is measured.
For both indicators, we present the summary of
the results obtained. In each case, we present the
average of R and hypervolume measures over 25
independent runs. These values are given for the
different sizes of neighbourhood.
According to these tables, we notice that the
adaptive MOPSO algorithm is giving the worst
results in comparison to the other techniques,
presumably because this algorithm presents a classic
PSO technique without sophisticated enhancements
used to handle the case of multi-objective
optimization. In fact, the proposed ameliorations are
used to control the parameters settings.
We notice also that the hybridization with the SA
gives generally better results than Tribes-V4.
Moreover, SA-TribesV1 outperforms generally the
others versions except for test functions S_ZDT4
and R_ZDT4 where SA-TribesV3 gives the best
results. In fact, at this case, a bad convergence
behaviour is detected for S_ZDT4 and R_ZDT4 for
all the versions except SA-TribesV3. We note that a
bad convergence behaviour is detected also with
another PSO algorithm for ZDT4 in (Hu, Eberhart
and Shi, 2003).
The results of Mo-Tribes are very close to those
of SA-TribesV1. This can be explained by the fact
that Mo-Tribes uses also a local search technique
applied only on the archive’s particles.
Finally, we recapitulate that SA-Tribes is very
competitive as it supports both intensification and
diversification. In fact, the choice of particle’s
informer is done in order to accelerate the swarm’s
convergence towards the search space zones where
are situated the archive’s particles. This can be
considered as an intensification process. Moreover,
the archive’s updating is done thanks to the Crowd
function that maintains the archive’s diversity. This
can be considered as a diversification process.
Indeed, SA supports both intensification and
diversification. The good neighbourhood exploration
A NEW PROPOSAL FOR A MULTI-OBJECTIVE TECHNIQUE USING TRIBES AND SIMULATED ANNEALING
133
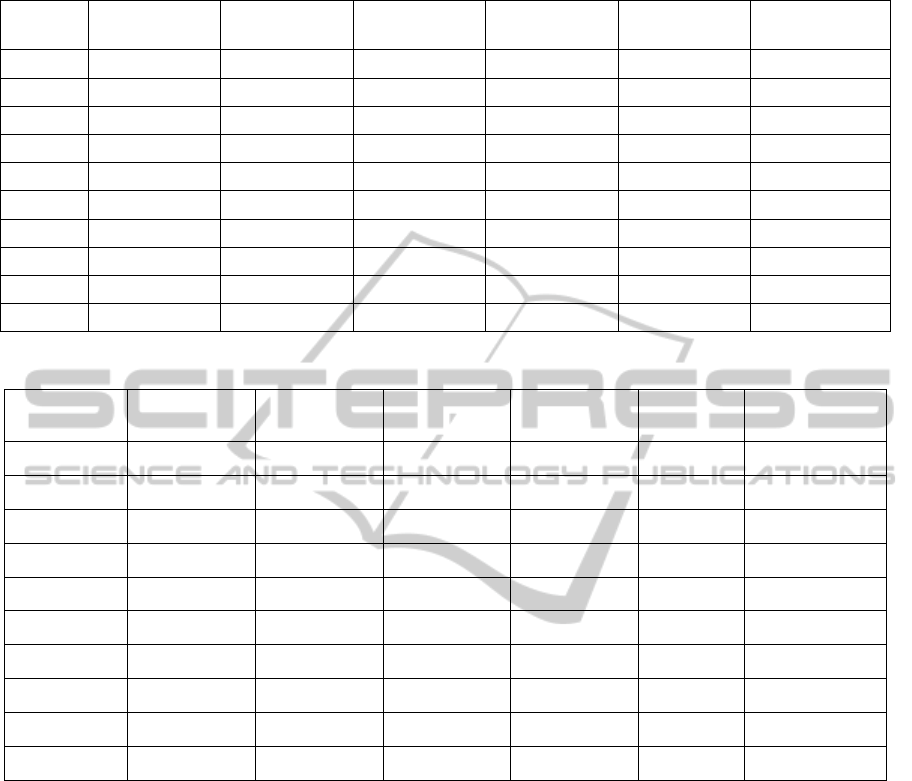
Table 1: Results for R indicator.
Test
Functions
SA-TribesV1 SA-TribesV2 SA-TribesV3 Tribes-V4 MO-Tribes Adaptive-MOPSO
Oka2
-1
,
23e-3
-8
,
07e-5 -6
,
43e-4 8
,
51e-5 -1
,
10e-3 2
,
79e-2
S
y
m
p
art
1
,
08e-6
4
,
57e-5 8
,
12e-5 2
,
39e-4 5
,
18e-5 7
,
22e-5
SZDT1
3
,
27e-4
1
,
26e-3 6
,
43e-4 2
,
79e-3 5
,
12e-4 1
,
93e-2
SZDT2
6
,
07e-6
1
,
78e-3 5
,
32e-5 2
,
80e-4 5
,
01e-5 9
,
64e-2
SZDT4
3
,
86e-3 8
,
16e-3
6
,
74e-6
2
,
07e-3 4
,
96e-3 4
,
10e-2
RZDT4
8
,
24e-3 4
,
59e-3
1
,
16e-4
6
,
98e-3 5
,
23e-3 8
,
14e-3
SZDT6
1
,
96e-3
5
,
37e-3 3
,
84e-3 3
,
05e-3 3
,
51e-3 1
,
21e-1
WFG1
3
,
42e-2 6
,
72e-2 3
,
11e-2
1
,
22e-2
1
,
53e-2 7
,
68e-2
WFG8
-2
,
85e-2
-1
,
12e-2 -4
,
23e-3 -4
,
59e-4 -2
,
26e-2 -1
,
30e-2
WFG9
-2
,
14e-2
-3
,
60e-3 -7
,
52e-3 -5
,
06e-3 -9
,
10e-3 -6
,
78e-3
Table 2: Results for ܫ
ு
ഥ
indicator.
Test functions SA-TribesV1 SA-TribesV2 SA-TribesV3 Tribes-V4 MO-Tribes Adaptive-MOPSO
Oka2
-1,14e-3
-9,82e-4 -1,06e-3 -1,10e-4 -1,12e-3 5,54e-2
Sympart
1,23e-4
1,65e-4 1,97e-4 1,28e-4 1,52e-4 2,09e-4
S_ZDT1
6,49e-4
4,68e-3 5,12e-3 2,05e-3 2,25e-3 6,27e-2
S_ZDT2
3,15e-4
3,32e-3 3,74e-4 2,87e-4 3,38e-4 2,25e-1
S_ZDT4
6,71e-3 4,03e-2
2,51e-4
2,16e-2 2,12e-2 1,21e-1
R_ZDT4
2,16e-2 8,74e-3
1,07e-3
2,06e-2 1,55e-2 2,42e-2
S_ZDT6
1,01e-2 2,64e-2 1,60e-2 6,54e-2
7,41e-3
3,02e-1
WFG1
1,64e-1 1,97e-1 1,44e-1 3,44e-1
8,51e-2
3,88e-1
WFG8
-1,24e-1
-7,03e-2 -7,05e-2 -2,95e-2 -1,43e-2 -8,68e-2
WFG9
-2,83e-2 -2,12e-2 -4,17e-3 -3,28e-2
-5,72e-2
-3,86e-2
intensifies the search towards specific zones in the
search space. Besides, the SA mechanisms such as
accepting worsening moves allow avoiding the risk
of trapping in non Pareto solutions.
5 CONCLUSIONS
This work presented a new hybrid multi-objective
evolutionary algorithm based on Tribes and SA.
This hybrid aims to combine the high convergence
rate of Tribes with the good neighbourhood
exploration performed by the SA algorithm.
Therefore, we have studied the impact of the place
where we apply SA technique on the performance of
the algorithm. Two widely used metrics have been
used to evaluate the results. The proposed version
SA-TribesV1 gave the best results almost for all the
test functions except for S-ZDT4 and R-ZDT4 for
which the SA-TribesV3 gave the best results.
The results showed that the hybridization is a
very promising approach to multi-objective
optimization. However, for some complex problems
such as S-ZDT4 and R-ZDT4, SA-Tribes still need
to improve its performance. As part of our ongoing
work we are going to study some other strategies of
displacement and adaptation in order to remedy to
those problems.
REFERENCES
Bergh, F. (2002). An Analysis of Particle Swarm
Optimizers. PhD thesis, Departement of Computer
Science, University of Pretoria, Pretoria, South Africa.
Carlos, A. and Coello, C.A.C. (2000, June). An Updated
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
134

Survey of GA-Based Multiobjective Optimization
Techniques. ACM Computing Surveys, Vol. 32, No. 2.
Chelouah, R. and Siarry, P. (2000). Tabu Search applied
to global optimization. European Journal of
Operational Research 123, 256-270.
Clerc, M. (2006). Particle Swarm Optimization.
International Scientific and Technical Encyclopaedia,
John Wiley & sons.
Cooren, Y. (2008). Perfectionnement d'un algorithme
adaptatif d'optimisation par essaim particulaire.
Applications en génie médicale et en électronique.
PhD thesis, Université Paris 12.
Hu, X., Eberhart, R. and Shi, Y. (2003). Particle swarm
with Extended Memory for multi-objective
Optimization. In IEEE Swarm Intelligence
Symposium.
Kirkpatrick, S., Gellat, D.C. and Vecchi, M.P. (1983).
Optimization by simulated annealing. Science, 220:
671-680.
Knowles, J., Thiele, L. and Zitler, E. (2006, February). A
tutorial on the Performance Assessement of Stochastic
Multi-objective Optimizers. Tik-Report No-214,
Computer Engineering and Networks Laboratory,
ETH Zurich, Switzerland.
Zielinski, K. and Laur, R. (2007). Adaptive Parameter
Setting for a Multi-Objective Particle Swarm
Optimization Algorithm. Proceedings of the 2007
IEEE Congress on Evolutionary Computation, IEEE
Press, 3019 - 3026.
Zitzler, E. and Deb, K. (2007, July). Tutorial on
Evolutionary Multiobjective Optimization.
Proceedings of the Genetic and Evolutionary
Computation Conference (GECCO’07), London,
United Kingdom.
A NEW PROPOSAL FOR A MULTI-OBJECTIVE TECHNIQUE USING TRIBES AND SIMULATED ANNEALING
135
