
IMPROVED ADAPTIVE META-NETWORK DESIGN
EMPLOYING GENETIC ALGORITHM TECHNIQUES
Ben McElroy and Gareth Howells
School of Engineering and Digital Arts, University of Kent, Canterbury, Kent, CT2 7NT, U.K.
Keywords: Weightless Neural Network, Meta-Networks, Genetic Algorithm, Neural Architectures, Ultrasonic Sensors.
Abstract: This paper investigates the employment of a Genetic Algorithm to optimally configure the parameters of a
class of weightless artificial neural network architectures. Specifically, the Genetic Algorithm is used to
vary the parameters of the architecture and reduce the rigidity of the mutation algorithm to allow for a more
varied population and avoidance of local minima traps. An exemplar of the system is presented in the form
of an obstacle avoidance system for a mobile robot equipped with ultrasonic sensors.
1 INTRODUCTION
The optimisation problem for classes of artificial
neural networks has been investigated over a number
of years (Kordík, et al., 2010) (Abraham, 2004)
(Abraham, 2002). This paper investigates the
optimisation problem for a class of simple yet
flexible artificial networks termed RAM based or
weightless networks. The specific problem
considered in this paper is that of enabling a mobile
robot to determine the optimal direction of travel
using weightless neural networks. This work looks
at using simple measures fed into the network to
determine if it can settle on an appropriate obstacle
avoiding response/route. Adaptive systems offer the
ability to learn and generalize from a set of known
examples allowing them to recognize previously
unseen inputs based on their similarity of
characteristics with previously seen examples.
RAM-based weightless neural networks are a type of
neural network well suited to the expression of
solutions to such logical problems (McElroy, et al.,
2010). Such neural networks possess many
advantages over conventional weighted neural
networks since they allow the possibility of:-
• One shot learning – this is an object
categorization problem of current research
interest. Usually machine learning based object
categorization algorithms require a lot of training
on hundreds or thousands of items, one-shot
learning attempts to minimize this by having
sufficient information about the object categories
from just one, or only a few, training
images/items.
• Arbitrary mappings from inputs to outputs – the
system is more robust as it does not require
specific pathways to be assigned from input to
output.
• Easier direct hardware implementation.
Manual optimisation of the configuration parameters
of Artificial Neural Networks (ANNs) for a specific
problem domain currently relies heavily on human
experts with sufficient knowledge on the different
aspects of the network as well as the problem
domain itself (Yao, 1999). As the complexity of the
problem domain increases and when near-optimal
networks are desired, manual searching becomes
more difficult and unmanageable. This paper seeks
to evaluate the potential of using weightless ANNs
within a meta-network structure to determine the
direction of a robot when it encounters an obstacle
and improve the accuracy of the response generated.
The paper is structured as follows. Section 1.1
briefly outlines evolutionary neural networks and
their advantages. Section 2 describes the robot being
used and the setup of the sensors. Section 3 goes into
detail about weightless neural networks and how
they differ from their weighted counterparts. Section
4 covers the problem this paper is exploring while
section 5 explains how the meta-network operates in
detail. Section 6 shows the experimental setup and
how the data was encoded, and section 7 displays
the results. Finally, section 8 concludes the paper
with finishing remarks.
142
McElroy B. and Howells G..
IMPROVED ADAPTIVE META-NETWORK DESIGN EMPLOYING GENETIC ALGORITHM TECHNIQUES.
DOI: 10.5220/0003539401420148
In Proceedings of the 8th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2011), pages 142-148
ISBN: 978-989-8425-74-4
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
1.1 Evolutionary Artificial Neural
Networks
Evolutionary Artificial neural networks (EANNs)
are a specific type of ANN whereby evolution is
used as another form of adaptation which
supplements learning (Abraham, 2004) (Abraham,
2002) (Slowik, et al., 2008). One distinct feature of
EANN’s is their adaptability to a dynamic
environment. EANN’s can adjust to a multitude of
scenarios as well as changes in the environment.
There are three significant areas to which evolution
has been introduced: the connection weights, the
learning rules and the architectures (Yao, 1999). In
this paper we deal primarily with the evolution of
architectures which enables ANN’s to adapt their
topologies to different tasks without human
intervention and thus provides an approach to
automatic weightless ANN design, a class of
architectures to which this technique has not
previously been applied.
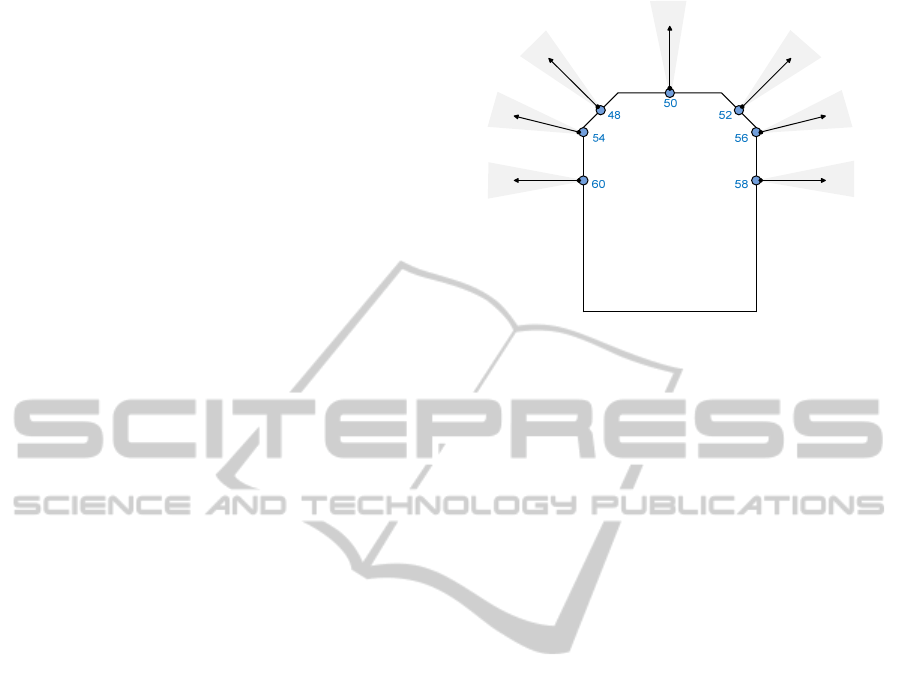
2 ULTRASONIC SENSORS
A robot equipped with seven ultrasonic sensors was
used in the investigation. Although further sensors
may prove necessary for a practical system, this
configuration was used for the purposes of
evaluating the proposed network configuration as it
formed a balance between complexity and utility of
the data. The ultrasonic sensors that adorn the robot
are shown in figure 1. Each sensor has an associated
ID which was used to identify them in the data. The
grey area in Figure 1 shows the approximate cone
that the sensors operate within. The sensors have a
maximum range of four metres, and return the
distance to the closest object within their cone of
detection. The sensors are set to return data every
half a second with a distance given in millimetres.
Ultrasonic sensors work in a similar way to radar
or sonar which assess characteristics of a target by
interpreting the return signal, or ‘echoes’, from radio
or sound waves respectively. These sensors typically
produce high frequency sound waves and look for
the echo from them. The Sensors then have a time
delay between sending and receiving the echo and
use this to calculate the distance to the object. Sonar
sensors are used successfully in a wide variety of
applications, such as medical imaging,
non-destructive testing and vehicle ranging systems.
Figure 1: Robot Sensor Setup.
3 WEIGHTLESS ARTIFICIAL
NEURAL ARCHITECTURES
As a class of architectures, Weightless Neural
Networks were first introduced by Bledsoe and
Browning in 1959 (Bledsoe, et al., 1959). They
consist of 'weightless' neurons - neurons that have no
weight between the input and the node – with the
inputs and outputs expressed as simple binary
values. While their weighted brethren require a lot
of training, Weightless networks can be trained very
quickly and installed on much simpler hardware.
Further, whereas in other neural network models the
weights are adjusted, WsNNs are trained by
modifying the composition of the look-up tables.
The architecture to be employed in this
investigation is the Generalised Convergent Network
(GCN) (Howells, et al., 1995 ). It employ layers of
neurons each independently attached to a given
sample pattern whose distinct outputs are merged via
a further layer to produce an output matrix equal in
dimension to the original sample pattern. A varying
number of groups of such layers arranged
sequentially may be employed by the various
architectures.
An example GCN architecture is illustrated in
Figure 2 and it possesses the following general
properties:-
• Network neurons are typically arranged in a two
dimensional layer where each row represents a
component of the input data.
• Each element within the pattern is associated
with a corresponding neuron within each layer.
• The layers comprising the network are arranged
in two groups, termed the Pre group and the
Main group.
IMPROVED ADAPTIVE META-NETWORK DESIGN EMPLOYING GENETIC ALGORITHM TECHNIQUES
143
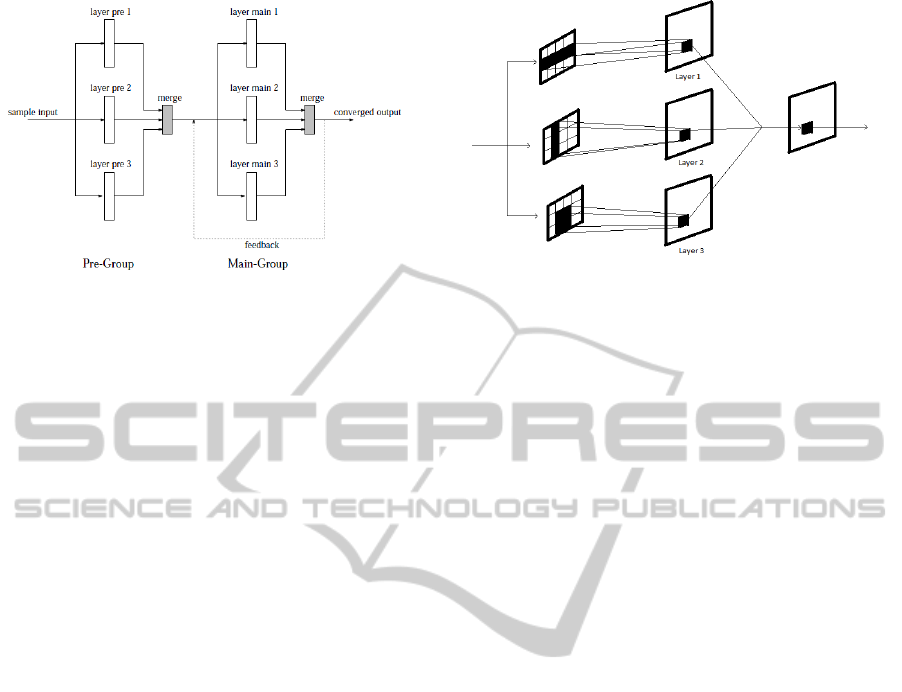
Figure 2: GCN example layer setup.
• A further Merge layer exists after each group
whose function is to combine the outputs of the
constituent layers of the group. The Merge
operation is performed on the corresponding
neurons from each layer within the group and
for each position within the layer shown in
figure 3. The number of inputs of a neuron
comprising a Merge layer is thus equal to the
number of layers within the group to which it
pertains.
• The Merged output of the Main Group is fed
back, unmodified, to the inputs of each layer
comprising the group.
• The number of layers within each group and the
connectivity of the neurons within differing
layers are arbitrary and the optimal number of
each varies with the application area. It is the
determination of these parameters which forms
the research focus of this paper.
• The constituent layers of a group differ in the
selection of elements attached to the inputs of
their constituent neurons (termed the
connectivity pattern). Again, this is a major
parameter to be optimised within the network
configuration.
• However, neurons within a given layer possess
the same connectivity pattern relative to their
position within the matrix and this is not a
network parameter which may be modified.
The connectivity patterns for neurons of differing
layers take various forms and hence represents an
area for optimisation. Further, for each neuron, the
values comprising the input set are calculated
modulo the dimensions of the pattern. Therefore
neurons which, for example, are situated at the right
edge of a pattern and are virtually clamped to the ‘x’
bits on their right will actually be clamped to ‘x’ bits
at the left side of the pattern. Some layers take inputs
from non-local areas of the pattern. For the code we
Figure 3: Sample potential layer connectivities.
are using which has been parsed into a matrix this
means that each layer will be looking at a slightly
different ‘picture’ of the same sample, allowing for a
high chance of recognition should there be a pattern.
The GCN network architecture employs RAM-
based neurons with varying sized symbol sets which
are the values stored within rather than more
conventional Boolean symbol sets employed by
alternative RAM-based networks (Howells, et al.,
1994 ). The symbol set is extended to allow a
symbol to represent each pattern class under
consideration. For example, if ten pattern classes
representing numerals were being considered, the
symbols `0' through `9' could be employed
representing the numerals 0 through 9 respectively.
In the case of this paper, these ‘symbols’ are
represented by the sensor data collected from the
robot. As the network only takes binary as an input,
this data has to be specially formatted – this is
discussed in detail in a later section. These symbols
are referred to as the base symbols of the network.
A comprehensive description of this architecture
and its associated training and recognition
algorithms may be found in (Howells, et al., 1995 ).
4 THE PROBLEM DOMAIN
The robot begins in an open area with a few static
obstacles placed at strategic points in its path. Only
one obstacle will be negotiated at any given time for
these experiments. In order to correctly negotiate the
robot around obstacles, the system must be able to
identify not only where the object is in relation to
the robot, but also which way to turn in order to
avoid it. With data that could be in constant flux
when in tight areas such as small corridors or
cluttered environments, the ability to modify the
neural network to deal with this is incredibly useful.
These experiments should show that the network can
identify an object in proximity and correctly
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
144
determine a new direction in order to avoid the
obstacle. This is a simple task but the key aim is to
demonstrate the meta-network’s ability to improve
the decision making ability of the robot by
modifying the architecture of the network.
Weightless Neural Networks typically take
binary as inputs and as such the data must to be
parsed – this is shown in a later section. For this
particular experiment, the network will be analysing
the distances and determining a direction from this.
As a comparison, a GCN network using randomly
generated architectures will be employed to see how
effective the meta-network is at improving the
accuracy of the results.
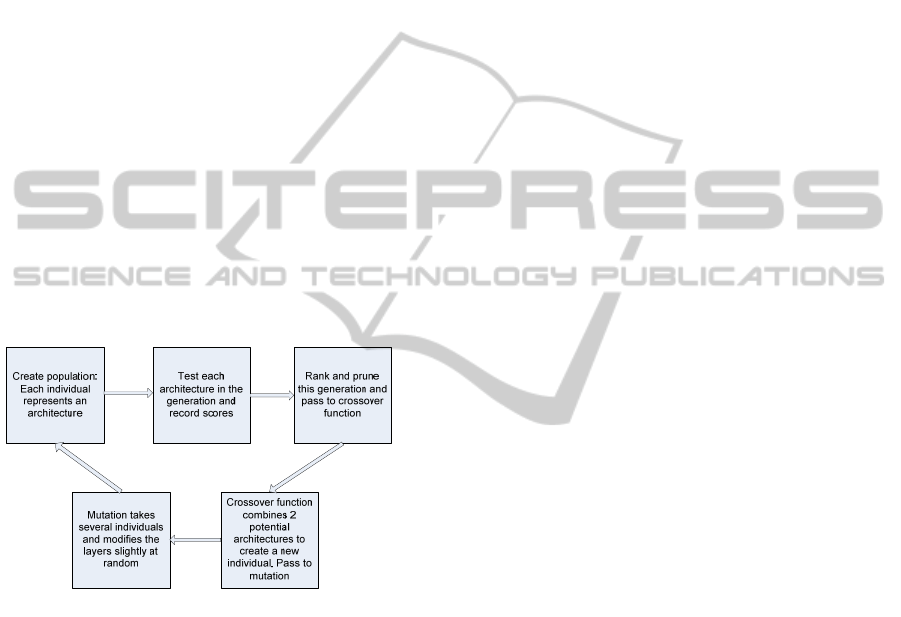
5 META-NETWORK
As stated above, to combat the problem of finding a
practically employable architecture for a weightless
neural network, a genetic algorithm was chosen. The
framework used in the present work is a layered
process of an evolutionary search of ANNs, as
illustrated in Figure 4.
Figure 4: Basic Diagram depicting the various processes
involved.
As mentioned in the introduction, architecture
design is crucial to the successful application of a
weightless ANN because it has significant impact on
the network’s information processing capabilities.
With a variable number of layers, neurons per layer,
and neuron placement, the number of potential
architectures is potentially very large. For a
particular learning scenario, a network with
relatively few connections may imply it will be
unable to perform the task due to its limited
capability. Conversely, a network with a large
number of connections may add noise to the training
data and fail to generalise appropriately –a balance
must be struck. To combat the problem of finding a
practical architecture for a weightless neural
network, the following Genetic Algorithm was
employed.
There are several variables that can be modified
when using the GCN architecture, including input
size, number of layers, number of neurons (per
layer), and the size of the training set size. For these
experiments, the size of the training set and the input
size were set to seven and 6x7 respectively. The
reason for the input size is described in a later
section. This paper investigates the use of a Genetic
Algorithm to optimise the parameter configuration
for employment in an obstacle avoidance task.
There were some inherent problems with using at
standard genetic algorithm as a base however:
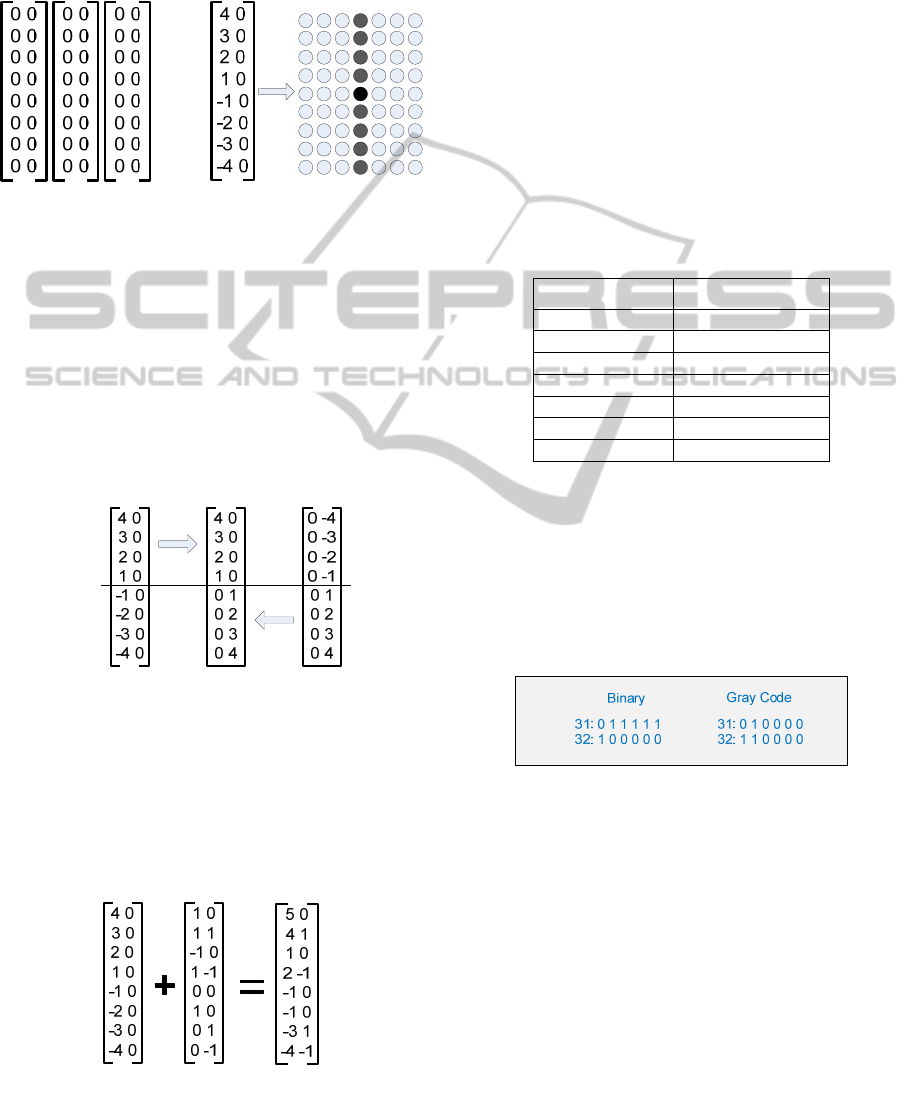
5.1 Inputs
Typically the inputs to a genetic algorithm are
strings or numbers which are the parameters the
genetic algorithm can modify. However, for this
experiment, numbers would not suffice due to the
complexity of the problem – It needed to modify 3
component parameters of information. The first is
the number of layers, the second is the number of
neurons within each of these layers, and the third is
the placement of these neurons. As such, a custom
input was defined as shown in Figure 5. On the left,
Figure 5 shows 3 ‘layers’– each pair of zeros
represents the relative coordinates for a neuron from
which its inputs will be derived, remembering that
the dimensions of the layer and input pattern are
identical. As described in the previous section
discussing the weightless neural architecture, the
pattern ‘wraps’ around, meaning that neurons on the
right side of the pattern are virtually clamped to
those on the left. If a coordinate given exceeds the
boundaries of the matrix, it simply wraps around. So
the layer on the right in Figure 3 translates as a
straight line of neurons for that layer for the element
in the centre of the layer.
5.2 Initial Population
The initial population is created using a random
generator for both the number or layers and how
many neurons will be in each individual layer.
Subsequently, tests are carried out on the data and
the error rate is returned for each individual. The
error rates are then multiplied by a factor of their
complexity – each additional layer adds a 0.05 to a
value that the error rate will be multiplied by, so that
smaller networks with similar results will edge out
those with larger networks. For example, if there are
two architectures – A and B - each with an error
IMPROVED ADAPTIVE META-NETWORK DESIGN EMPLOYING GENETIC ALGORITHM TECHNIQUES
145
rate of 10%, but A has 3 layers while B has 5, A has
a better fitness rating (10*1.15=11.5) than B
(10*1.25=12.5) and as such, the genetic algorithm
will favour it in selection. These fitness ratings are
then ranked, and the bottom 50% are pruned.
Figure 5: (Left) Shows input design for the genetic
algorithm. (Right) Shows graphic translation of
coordinates to layer.
5.3 Crossover
Crossover takes selected individuals and ‘mates’
them by taking the first half of each layer of the first
individual and the second half of each layer of the
second individual, as shown in figure 6. This creates
a new individual (representing an architecture)
which is then added to the next generation for
testing.
Figure 6: During Crossover, top of parent A combined
with bottom half of parent B for each layer.
5.4 Mutation
Mutation is employed to a few individuals via slight
modifications to create new architectures. This is
achieved by adding a matrix of integers that range
between -1 and 1, as shown in figure 7.
Figure 7 : Each layer has a matrix of the same size added
to it. This layer has values between -1 and 1.
6 EXPERIMENTATION
The robot needed to be able to identify an obstacle
and turn in the correct direction in order to avoid it.
As such data needed to be collected from the sensors
so that it could be analysed and parsed. If the object
is a medium distance away for example, it should
take less drastic action than if it was a short distance
away.
Data was collected from the sensors during a test
run of the robot which lasted for 37 seconds. 518
readings were taken during this time, or 74 per
sensor. The data format is shown below in Table 1.
From this simulated data was created representing
different scenarios the robot would encounter.
Table 1: Example data collected.
Sensor ID Distance (mm)
48 1982
50 2967
52 3001
54 4371
56 2489
58 1001
60 443
The distance needed to be converted into a Gray
code (Gilbert, 1958) so that it could be fed into the,
network. This was necessitated as it is required for
codes representing similar values to possess similar
binary encodings. This is not the case with natural
binary due to the severe changes evident when going
from certain numbers, for example 31 to 32 shown
in figure 8.
Figure 8: Difference between normal binary code and gray
code.
Since the network works by finding similarities
in the patterns, similar distances must be represented
by similar encoded data, which is not the case in
binary. Figure X shows how the data was quantized
into 64 equidistant parts ranging between 0(0) –
4500(63), representing the range of distances found
in the data. This number was then encoded using the
above method for each of the sensors, forming a 6x7
matrix displayed in figure 9.
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
146
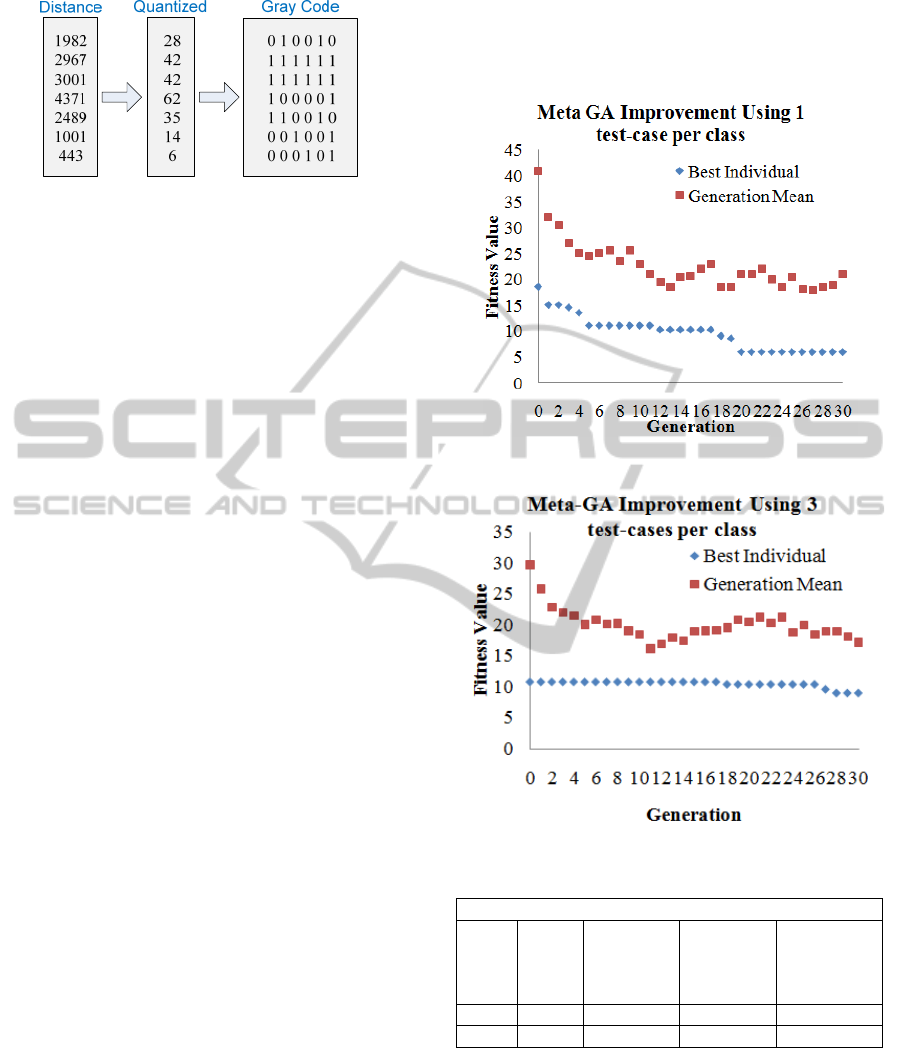
Figure 9: Showing how the data is encoded.
Each row in the above binary directly relates to a
sensor and the distance recorded at that particular
interval.
Five classes were created each representing a
direction the robot should take. The reason for using
five is to show that the network can discern the
difference between taking a small change in
direction as opposed to a large one. These were; left
(-90̊ -45̊) slightly left (-44̊-1̊), straight (0̊), slightly
right (1̊-44̊) and right (45̊-90̊). Each category was
allocated a training set containing 7 encoded
matrices. These included examples of an obstacle at
varying distances from the sensor in different
locations. A test set for each direction was also
derived from the data collected were selected
however, only ‘simple’ examples were taken, where
there could only logically be ‘one’ obstacle (adjacent
sensors ‘hit’).
7 RESULTS AND DISCUSSION
The meta-network was applied to the training data
derived from the mobile robot. The initial
population was set to 30, and the architectures were
limited to a maximum of 12 layers. The reason for
this is to ensure that the genetic algorithm doesn’t
create overly large, time consuming networks. The
results show that the system finds a result that has an
error rate of 4.75% in just 21 generations. The
fitness value on the Y axis represents error rate
multiplied by a factor of the architectures
complexity, as described at the start of section 4.
To further determine the usefulness of this
approach, the test set for each class was increased to
3, meaning that each architecture would see a total
of 15 different scenarios. The results from this can
be seen in figure 11, which show little change in the
best individual.
However, as the generation average is much lower
than that in figure 10, it is possible the initial system
configuration was in a near optimal state, meaning
that there was little room for improvement. A
comparison can be seen in Table 2, which shows the
differences between the experiments. The initial
means differ quite substantially, meaning that the
initial population from the second experiment out-
performed those from the first.
Figure 10: Results from initial experiments.
Figure 11: Results from experiment with increased test set.
Table 2: Comparison of results.
Comparison of experiments
# of
Test-
cases
Initial
Mean
Initial
Best
Individual
Final
Individual
Standard
Deviation
of Best
Individuals
1 41 18.5 5.9 3.4
3 29.8 10.9 9.1 0.6
It was found that increasing the number of
generations past 30 did not yield better results, and it
would eventually stop due to there being no
improvement in fitness over a set number of
generations. For both experiments the best
architecture found had 5 layers, indicating a balance
between network complexity and fitness (more
IMPROVED ADAPTIVE META-NETWORK DESIGN EMPLOYING GENETIC ALGORITHM TECHNIQUES
147
complex architectures with similar accuracies were
discarded).
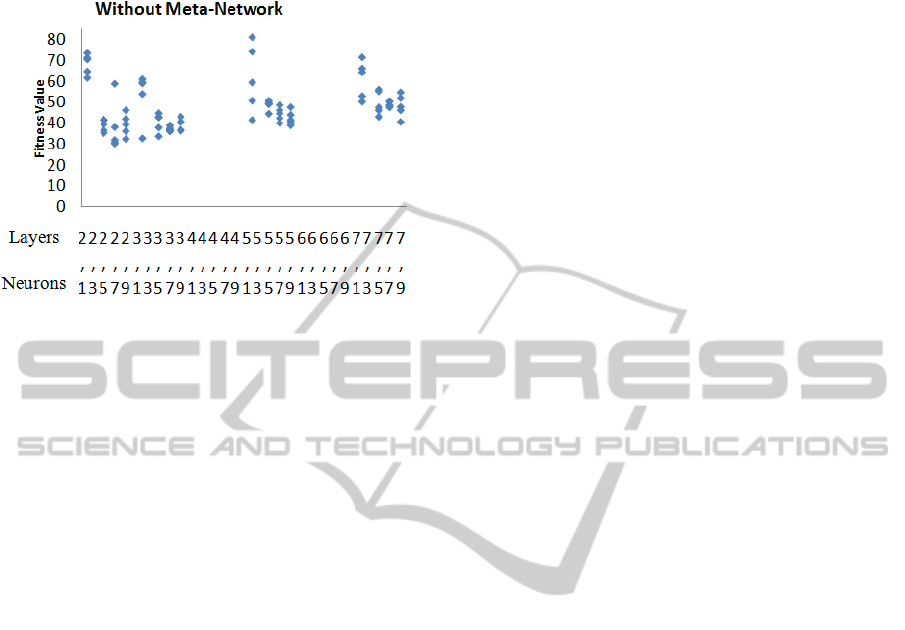
Figure 12: Using GCN without the meta-network.
When drawing a comparison with using the GCN
network without the meta-network the differences
are clear. Using the same data and test cases as the
second experiment, the GCN was used on its own.
The number of layers and the number of neurons per
layer must be set manually, and a random
architecture is derived from this. Figure 12 shows
that over a multitude of different layer and neuron
configurations, it fails to find an architecture that
comes close to that displayed in figures 10 and 11.
8 CONCLUSIONS
The paper has investigated the use of a Genetic
Algorithm to optimise the configuration of a simple
weightless neural architecture. The results indicate
that this approach possesses potential merit. A major
advantage is the simple nature of both the parsed
data input and the network being used.
ACKNOWLEDGEMENTS
This research is supported by the European Union
ERDF Interreg V scheme under the SYSIASS Grant.
REFERENCES
Abraham, A., 2004, Meta learning evolutionary artificial
neural networks. Neurocomputing, Issue - 38 : Vol. -
56, 0925-2312.
Abraham A., 2002, Optimization of Evolutionary Neural
Networks Using Hybrid Learning Algorithms.
International Joint Conference on Neural Networks,
0-7803-7278-6.
Bledsoe W. and Browning I., 1959, Pattern recognition
and reading by machine. AFIPS Joint Computer
Conferences. Boston, Massachusetts.
Gilbert E., 1958, Gray codes and paths on the n-cube.
BellSystem Technical Journal, Vol. 37. 815-826.
Howells G., Fairhurst M. C., and Bisset D. L., 1994. BCN:
an architecture for weightless RAM-based neural
networks. IEEE International Conference on Neural
Networks. Orlando, FL. 0-7803-1901-X.
Howells G., Fairhurst M.C., and Bisset D. L., 1995. GCN:
the generalised convergent network. International
Conference on Image Processing and its Applications.
Edinburgh, 0-85296-642-3.
Kordík, P., Koutník, J, Drchala, J., Kováříka, O., Čepeka,
M. and Šnoreka, M., 2010. Meta-learning approach to
neural network optimization. Neural Networks, Vol.
23. - 0893-6080.
McElroy B. and Howells G., 2010. Evaluating the
Application of Simple Weightless Networks to
Complex Patterns International Conference on
Emerging Security Technologies (EST), 978-0-7695-
4175-4.
Slowik A. and Bialko M., 2008. Training of artificial
neural networks using differential evolution algorithm.
Conference on Human System Interactions, 978-1-
4244-1542-7.
Yao, X., 1999 Evolving Artificial Neural Networks.
Proceedings of the IEEE, Vol. 87. - 0018-9219 .
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
148
