
MULTI-VIEW 3D DATA ACQUISITION USING A SINGLE
UNCODED LIGHT PATTERN
Stefania Cristina
1
, Kenneth P. Camilleri
1
and Thomas Galea
2
1
Department of Systems and Control Engineering, University of Malta, Msida, Malta
2
Megabyte Ltd, Mosta, Malta
Keywords:
3D Reconstruction, Machine vision, Stereo, One-shot, Uncoded light pattern, Data fusion. Multiple views.
Abstract:
This research concerns the acquisition of 3-dimensional data from images for the purpose of modeling a per-
son’s head. This paper proposes an approach for acquiring the 3-dimensional reconstruction using a multiple
stereo camera vision platform and a combination of passive and active lighting techniques. The proposed one-
shot active lighting method projects a single, binary dot pattern, hence ensuring the suitability of the method
to reconstruct dynamic scenes. Contrary to the conventional spatial neighborhood coding techniques, this
approach matches corresponding spots between image pairs by exploiting solely the redundant data available
in the multiple camera images. This produces an initial, sparse reconstruction, which is then used to guide a
passive lighting technique to obtain a dense 3-dimensional representation of the object of interest. The results
obtained reveal the robustness of the projected pattern and the spot matching algorithm, and a decrease in the
number of false matches in the 3-dimensional dense reconstructions, particularly in smooth and textureless
regions on the human face.
1 INTRODUCTION
The acquisition of 3-dimensional data by stereovision
techniquesis a very widely researched area in the field
of computer vision due to its wide range of applica-
tions. However, the range finders proposed to date
still face major challenges such as the reconstruction
of textureless surfaces.
Passive range finders depend only on stereo im-
ages acquired in ambient lighting to operate. Multi-
view passive systems (Okutomi and Kanade, 1993;
Kang et al., 2001; Gallup et al., 2008) provide larger
surface coverage and higher depth accuracy when
compared to passive two-camera systems. However,
their performance is still challenged by texturless sur-
faces. Active range finders code the viewed scene
with a light pattern to address the issues in recon-
structing textureless surfaces. While temporal coding
(Chang, 2003; Zhang et al., 2002) and direct codifica-
tion (Miyasaka et al., 2000; Liang et al., 2007) tech-
niques are not suitable for reconstructing non-static
objects since they project multiple patterns, spatial
neighbourhood coding techniques (Shi et al., 2005;
Song and Chung, 2008) project only a single pattern
but they are not robust to surface depth discontinu-
ities.
The object of interest in this work that is sought to
be 3-dimensionally reconstructed is an ear-to-ear rep-
resentation of a person’s head. A multi-viewapproach
consisting of passive and active lighting techniques is
used due to the textureless nature of the human face.
The active technique projects a single, binary and un-
coded dot pattern, and an algorithm is proposed which
matches corresponding spots by exploiting the redun-
dant data in multiple stereo images. This matching al-
gorithm is not susceptible to surface depth discontinu-
ities and results in an initial, sparse reconstruction. A
dense 3-dimensional reconstruction is then obtained
using a passive lighting technique, which is guided
by the initial reconstruction to reduce the likelihood
of occurrence of false matches.
This paper is organized as follows. Section 2 de-
tails the various stages of the proposed approach. Ex-
perimental results are discussed in Section 3. Section
4 presents the concluding remarks and suggests fur-
ther work.
2 METHODS
The concept behind the proposed spot matching al-
gorithm is that for every 3-dimensional point on the
317
Cristina S., P. Camilleri K. and Galea T..
MULTI-VIEW 3D DATA ACQUISITION USING A SINGLE UNCODED LIGHT PATTERN.
DOI: 10.5220/0003545203170320
In Proceedings of the 8th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2011), pages 317-320
ISBN: 978-989-8425-75-1
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
surface of interest there is only one consistent and
physical depth value on which every stereo pair in
the multi-camera setup must agree, and this per-
mits the identification of correspondingspots between
multiple images. The multi-camera setup in this
work comprises 4 cameras, which are calibrated us-
ing Bouguet’s Camera Calibration Toolbox for Mat-
lab (Bouguet, 2010).
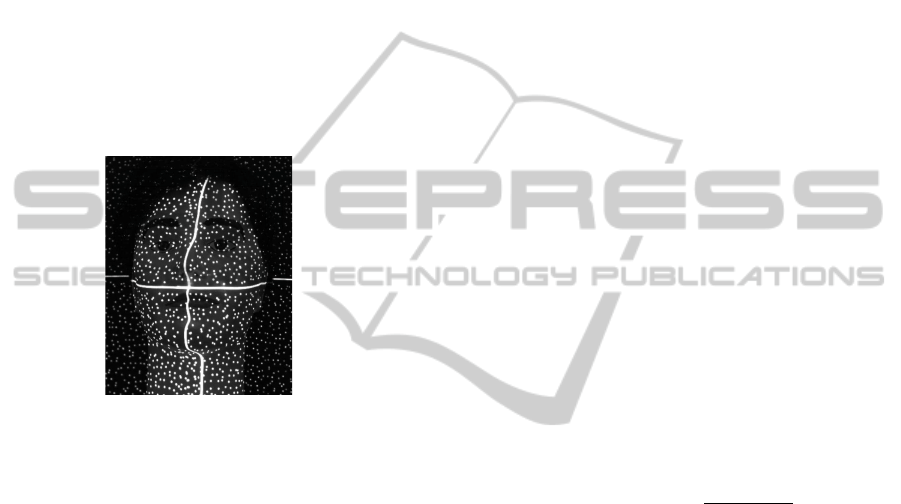
Spot Pattern Extraction: A simple, single pattern
composed of centered horizontal and vertical stripes,
spanning from one border to the other, and binary dots
is projected on the object of interest, as shown in Fig-
ure 1. The stripes delineate quadrant sets of dots al-
lowing each quadrant to be processed separately and
inhibiting every dot matching error from propagating
into other quadrants.
Figure 1: Projection of the light pattern onto the object of
interest, as acquired from one of the cameras.
The spot pattern is extracted by binarising the im-
ages of the object and the projected light pattern, and
filling any holes in the spots. The centroid of each ex-
tracted spot is then found and used to represent the ap-
proximate location of each projected spot. This yields
the images f
(u)
i
for any spot quadrant, where camera
index i = 1, . . . , n, and superscript u denotes unrecti-
fied images.
Spot Matching: In order to generate a sparse re-
construction of the object of interest, corresponding
spots between multiple stereo pairs need to be iden-
tified. Contrary to the active techniques reviewed
in Section 1, which rely on coded patterns to iden-
tify correct pixel correspondences, the proposed algo-
rithm exploits the redundant data in multiple stereo
images to match each spot in the uncoded binary pat-
tern. This ensures that the method is unaffected by
the underlying surface colour and is not susceptible
to surface depth discontinuities. The spot matching
procedurefirst involves identifying candidate matches
and then identifies the most likely match on the basis
of range consistency.
In order to identify the possible matching spots in
the pattern, the binary images are first rectified with
respect to a reference camera i according to (Fusiello
et al., 2000), in order to reduce the search problem
for correspondences to a 1-dimensional search along
epipolar lines. This yields the pairs of images, f
(r(i, j))
i
and f
(r(i, j))
j
for cameras indexed i and j respectively,
where j = 1, . . . , n, j 6= i, with a particular rectifica-
tion r(i, j) between camera pair i, j. The spots in im-
ages f
(r(i, j))
i
and f
(r(i, j))
j
are also arbitrarily assigned a
unique index value k
(i)
and k
( j)
respectively, for iden-
tification purposes.
Now, consider the spot indexed k
(i)
. Its true match
must theoretically lie on the epipolar line in image
f
(r(i, j))
j
. Therefore, the indices of the spots residing
on the epipolar line are included in the set, C
j
(k
(i)
) =
{k
( j)
1
, k
( j)
2
, . . . , k
( j)
N
} = {k
( j)
η
, 1 ≤ η ≤ N}, of candidate
matching dots for the spot with index, k
(i)
. In addi-
tion, spots residing on a number of rows above and
below the epipolar line are also included in the set of
candidate matches, since the estimation of each spot
location may shift the true match off the epipolar line.
Now, each candidate match is assigned a score and
a depth value. The score value was chosen to be a lin-
early decreasing function of distance from the epipo-
lar line. The depth value Z
(r(i, j))
(k
(i)
;k
( j)
η
) is calcu-
lated by triangulation between the reference spot with
index value, k
(i)
, and each candidate match, k
( j)
η
, in
C
j
(k
(i)
) as described by Equation 1.
Z
(r(i, j))
(k
(i)
;k
( j)
η
) =
B
i, j
F
(r(i, j))
d(k
(i)
, k
( j)
η
)
(1)
where, η = 1, . . . , N, B
i, j
denotes the baseline length
of the stereo pair (i, j), F
(r(i, j))
denotes the common
focal length of cameras i and j, and d(k
(i)
, k
( j)
η
) is the
disparity value in pixel units between spot index k
(i)
in f
(r(i, j))
i
and the candidate matching spot index k
( j)
η
in f
(r(i, j))
j
.
Since the depth value of the true match must be
consistent between all stereo pairs, this true match can
be identified by seeking that candidate match that has
the same depth value in all stereo pairs. However,
any inaccuracies in the camera calibration parameters
and the inaccurate approximation of each spot loca-
tion may cause the depth values of the true match
to vary by some value between different stereo pairs.
To counteract this discrepancy and identify the true
match, a weighted histogram of the depth values of
each candidate match is generated, where each can-
didate match is weighted by its score value forming a
histogram such as shown in Figure 2. A separate map-
ping table is also used to retain the relationship be-
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
318
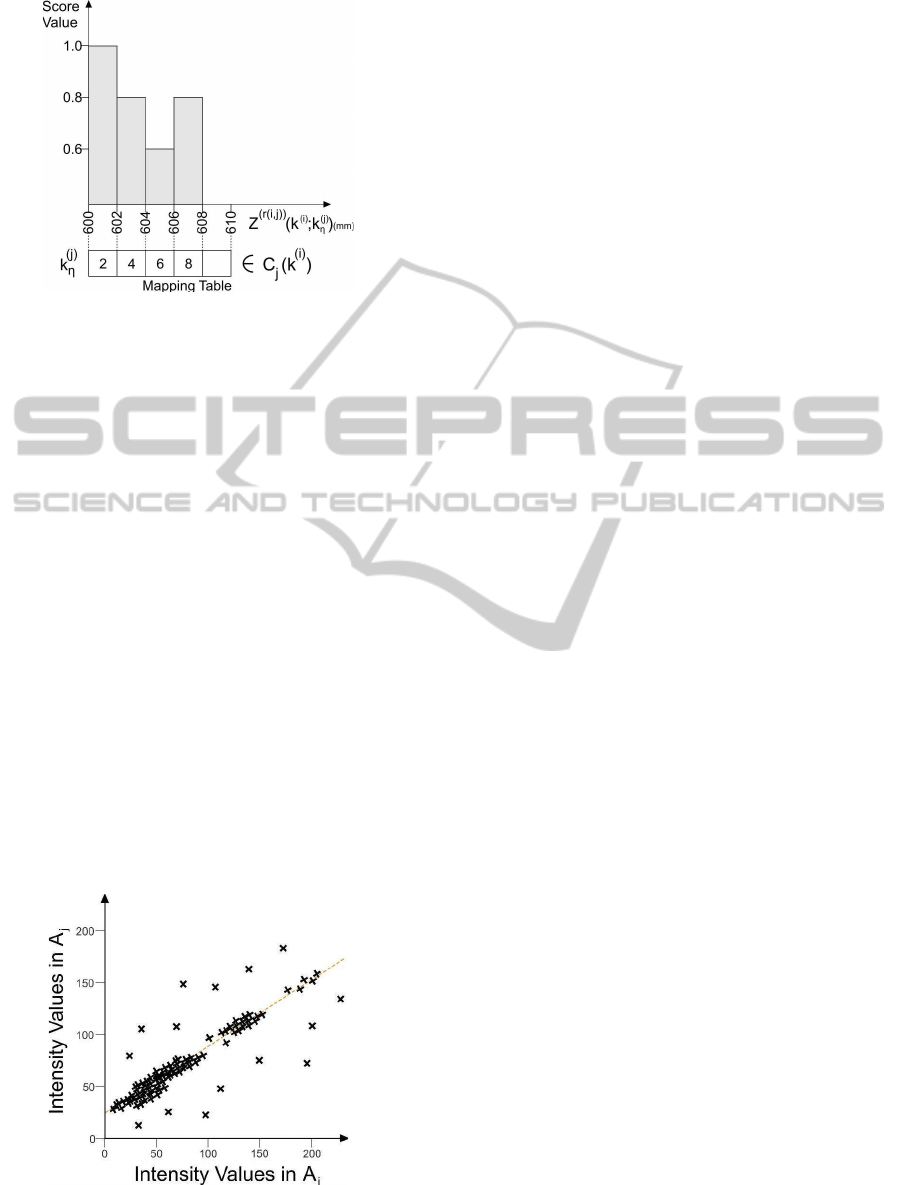
Figure 2: A weighted histogram of the depth values of each
candidate match is generated for each stereo pair, and a sep-
arate mapping table retains the relation between the index
value and depth value of each candidate match.
tween the index, k
( j)
η
, of a particular candidate match
and its depth value. The histogram of each stereo pair
is aligned and summed to generate a single global his-
togram. The mode depth interval is then chosen to
represent the range, and the corresponding spots are
identified and taken to represent the same dot in the
pattern.
Post-Processing of the Matched Spot Pattern:
Theoretically, true spot matches have similar inten-
sity values in stereo image pairs acquired in ambient
lighting. Ignoring any non-linearities in camera sensi-
tivity, all correctly matched spots should fit a straight
line. Therefore, the intensities of all matching spot
pairs are plotted in a 2-dimensional plot where each
axis represents the intensity of each camera in the
pair, as shown in Figure 3. The best straight line is
then fit to the distribution by linear regression, and
those points whose distance from the line is above
a certain tolerance are taken to represent mismatches
and are discarded.
Figure 3: The intensities of all matching spot pairs are plot-
ted, where A
i
and A
j
denote the ambient lighting images
acquired from cameras i and j respectively.
Localized Correspondence and 3D Reconstruc-
tion: The initial, sparse representation of the object
of interest is used to guide a passive correspondence
technique in order to obtain a dense 3-dimensional
reconstruction. All stereo image pairs are being in-
tensity calibrated by adopting a modified version of
(Kawai and Tomita, 1998).
The passive correspondence method used to ob-
tain a dense 3-dimensional representation of the ob-
ject of interest, is based on the Sum of Sum of
Square Differences (SSSD) in-inverse-distance tech-
nique by Okutomi and Kanade (1993). In the pro-
posed approach, the correspondence search range is
constrained for each individual pixel using the set of
matched spots. This increased the robustness of the
correspondence algorithm, as detailed in Section 3.
3 RESULTS AND DISCUSSION
The proposed approach was tested by projecting a
random dot pattern on a test mannequin, as shown
in Figure 1. From the results obtained it was found
that on average the spot matching algorithm yielded
97.53% of correctly matched spots per pattern quad-
rant.
For comparison purposes, the reconstruction in
Figure 4(a) was generated from intensity calibrated
images using the method in (Okutomi and Kanade,
1993). This result shows several false matches on sur-
face regions which mostly lack anydiscernible texture
such as the forehead, the cheeks and the chin, when
compared to the result obtained using the proposed
approach in Figure 4(b). The occurrence of these
false matches is a direct consequence of the large
search range considered in (Okutomi and Kanade,
1993). The SSSD-in-inverse-distance function in Fig-
ure 5(a) of a false match in Figure 4(a) shows multi-
ple minima whose SSSD value is very close, and a
global minimum at the wrong inverse-distance value.
On the other hand, constraining the search range in
the proposedapproach results in the SSSD-in-inverse-
distance function in Figure 5(b), which contains a
single minimum and correctly identifies the inverse-
distance value of the true match.
4 CONCLUSIONS
This work has dealt with the 3-dimensional recon-
struction of a person’s head using a multi-camera
setup and a combination of active and passive lighting
methods, to combine their merits and obtain a more
reliable 3-dimensional reconstruction.
MULTI-VIEW 3D DATA ACQUISITION USING A SINGLE UNCODED LIGHT PATTERN
319
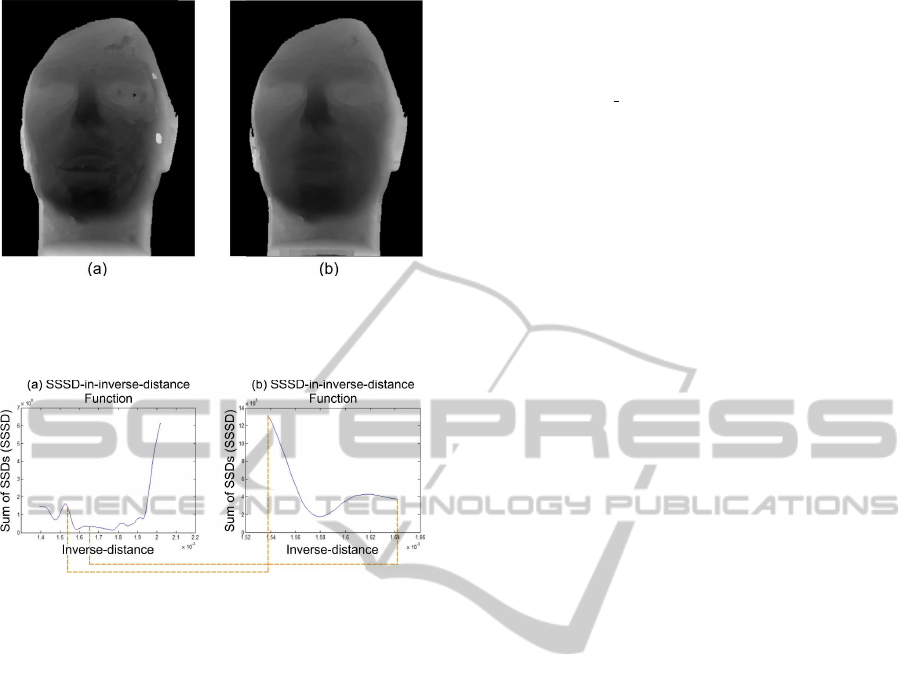
Figure 4: The depth map computed using the approach in
(Okutomi and Kanade, 1993) (a), compared to the depth
map generated using the proposed approach (b).
Figure 5: The large search range considered in (Okutomi
and Kanade, 1993) and the lack of surface texture result
in a global minimum at the wrong inverse-distance value
(a), while constraining the search range in the proposed
approach ensures the SSSD-in-inverse-distance function to
contain a single minimum at the true match (b).
The projection of a single, uncoded binary pattern
and the proposed spot matching algorithm are appli-
cable in reconstructing non-static surfaces which con-
tain depth discontinuities and are not colour-neutral.
This generates a sparse but reliable 3-dimensional
reconstruction, which is then used to constrain the
search range of a passive correspondence technique
to produce a dense reconstruction of the object of in-
terest.
Further work includes scaling up of the system to
include a larger number of cameras, in order to en-
hance the performance of the spot matching and cor-
respondence algorithms due to the availability of a
larger amount of multi-view redundant data.
ACKNOWLEDGEMENTS
This work is part of the project ’3D-Head’ funded by
the Malta Council for Science and Technology under
Research Grant No. RTDI-2004-034.
REFERENCES
Bouguet, J. Y. (2010). Camera calibration toolbox for
matlab. Available at: http://www.vision.caltech.edu/
bouguetj/calib doc/. [Accessed January 2010].
Chang, N. L. (2003). Efficient dense correspondences using
temporally encoded light patterns. In IEEE Interna-
tional Workshop on Projector-Camera Systems.
Fusiello, A., Trucco, E., and Verri, A. (2000). A compact
algorithm for rectification of stereo pairs. In Machine
Vision and Applications. Springer-Verlag.
Gallup, D., Frahm, J. M., Mordohai, P., and Pollefeys, M.
(2008). Variable baseline/resolution stereo. In IEEE
Conference on Computer Vision and Pattern Recogni-
tion. IEEE Computer Society.
Kang, S. B., Szeliski, R., and Chai, J. (2001). Handling oc-
clusions in dense multi-view stereo. In Proceedings of
the IEEE Computer Society Conference on Computer
Vision and Pattern Recognition. IEEE Computer So-
ciety.
Kawai, Y. and Tomita, F. (1998). Intensity calibration
for stereo images based on segment correspondence.
In International Association of Pattern Recognition,
Workshop on Machine Vision Applications.
Liang, Z., Gao, H., Nie, L., and Wu, L. (2007). 3d recon-
struction for telerobotic welding. In Proceedings of
the 2007 IEEE International Conference on Mecha-
tronics and Automation.
Miyasaka, T., Kuroda, K., Hirose, M., and Araki, K. (2000).
High speed 3-d measurement system using incoherent
light source for human performance analysis. In Pro-
ceedings of the 19th Congress of The International So-
ciety for Photogrammetry and Remote Sensing.
Okutomi, M. and Kanade, T. (1993). A multiple-baseline
stereo. In IEEE Transactions of Pattern Analysis and
Machine Intelligence. IEEE Computer Society.
Shi, L., Yang, X., and Pan, H. (2005). Face mod-
eling using grid light and feature point extraction.
In Proceedings of the International Conference on
Computational Science and its Applications. Springer
Berlin/Heidelberg.
Song, Z. and Chung, R. (2008). Grid point extraction
exploiting point symmetry in a pseudo-random color
pattern. In Proceedings of the 15th IEEEInternational
Conference on Image Processing.
Zhang, L., Curless, B., and Seitz, S. M. (2002). Rapid shape
acquisition using color structured light and multi-
pass dynamic programming. In Proceedings of the
First International Symposium on 3D Data Process-
ing Vizualization and Transmission. IEEE Computer
Society.
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
320
