
COOPERATIVE MODELING AND DYNAMICS SIMULATION
OF FLEXIBLE MULTI-BODY SYSTEM FOR PARALLEL ROBOT
Yongxian Liu
1
, Chunxia Zhu
1
and Jinfu Zhao
2
1
School of Mechanical Engineering and Automation, Northeastern University, Shenyang, China
2
Liaoning Energy Key Project Investment, Limited Liability Company, Beiling Street, Huanggu District, Shenyang, China
Keywords: Parallel robot, Dynamics of flexible multi-body, Cooperative, Modeling, Simulation, ADAMS, ANSYS.
Abstract: Based on the cooperative thought, a method of modeling and simulation of multi-flexible-body dynamics
for a kind of mechanism is proposed in this paper. A multi-flexible-body dynamics simulation model of 3-
TPT parallel robot is created, and its multi-body dynamics simulation is implemented by using the multi-
body dynamics simulation software ADAMS and finite element analysis software ANSYS. For more
accurate explanation of the analysis, simulation results of rigid body are compared with those of flexible
body. The simulation results have shown that forces applied on flexible bodies are highly nonlinear because
of the flexible characteristics, which is consistent with the reality. Compared with other simulation method,
the simulation proposed of the multi-flexible body system are more authentic, nicety and can reflect actual
dynamics characteristic of parallel robot with more accuracy. Therefore this is an effective method of
analysis for design and optimization of parallel robot.
1 INTRODUCTION
Flexible multi-body system generally consists of
rigid body and flexible body which interact with
each other the motion of these components unit may
be translational or rotational under the effect of
power. The traditional multi-body system dynamics
research is carried out mainly in the multi-rigid-body
field, however, because of the rigid assumption
sometimes its result will lose certain precision, even
can't be accepted (Shabana A. A, 1997). With
development of modern mechanical system towards
to high speed, heavy load, high-precision direction,
designers pay more and more attention to dynamic
stress of the component and the service life
prediction of product, elastic dynamics issue
resulting from the coupling between rigid motion
and the deformation itself of the system has already
become the common problems needed to be resolved
and key technology in this field. Therefore
considering the flexible of all the parts in order to
improve the precision of the simulation analysis
becomes an important direction of parallel robot
research (Fattah et al., 1995; Gamarra, 1999).
Robot dynamics simulation analysis is an
important content of robot design, the model
established in the previous analysis, whose
components belong to a rigid body, and don’t have
elastic deformation when making motion analysis.
But in fact, on the condition of the larger load, or
acceleration and deceleration, it will have larger
deformation and displacement after the mechanism
got forced, resulting in vibration. In order to solve
these problems, we should establish the reasonable
elastic dynamics model of the parallel robot, based
on this research the impact of its dynamic
performance and structure and geometrical
parameters on dynamic properties, put forward the
corresponding structure optimization design method
(Chen, 2001).
ADAMS software is well-known mechanical
system dynamics simulation software, its analysis
object is basically the multi-rigid-body, but the
ADAMS provides a flexible body module, the
module can be used to achieve motion simulation
analysis of flexible body and substitute elastic body
for rigid body. ANSYS software is a universal finite
element analysis software, with a friendly cross-
section before and after the treatment, accurate and
efficient solver, has been widely used in various
fields, it can effectively integrated the finite element
analysis with CAD, CAE organically. In this paper,
combining advantages of two kinds of software, the
flexible multi-body system is established to conduct
321
Liu Y., Zhu C. and Zhao J..
COOPERATIVE MODELING AND DYNAMICS SIMULATION OF FLEXIBLE MULTI-BODY SYSTEM FOR PARALLEL ROBOT.
DOI: 10.5220/0003566303210324
In Proceedings of the 8th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2011), pages 321-324
ISBN: 978-989-8425-75-1
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
dynamic simulation of mechanism the dynamic
behavior of mechanism can be simulated more
realistically.
2 THE ESTABLISHMENT OF
FLEXIBLE MULTI-BODY
DYNAMICS MODEL OF
PARALLEL ROBOT
All the objects in the mechanical dynamics
simulation software ADAMS are defined as rigid
bodies, and its theoretical basis is multi-rigid body
dynamics, so the impact of structural flexibility
movement is ignored, which is not good enough for
many system dynamics analysis (Wang et al., 2005).
However the general finite element software can do
nothing for dynamic analysis of the movement
system containing large displacement. But in the
ADAMS, combination of rigid and flexible body can
be a more feasible solution which can simulate the
dynamic behavior of the mechanism movement
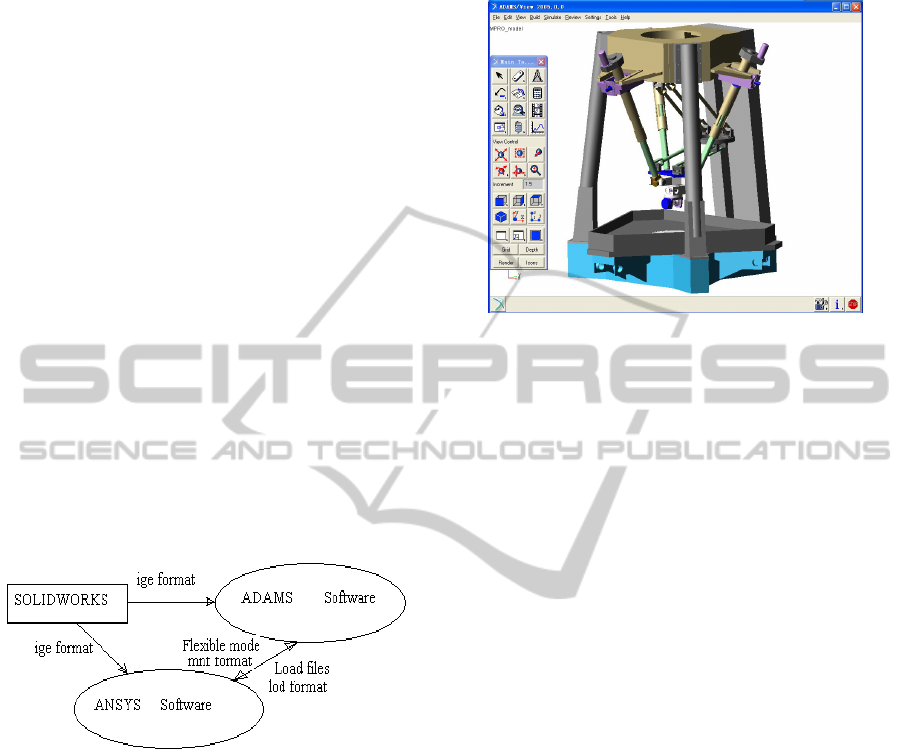
more realistically. The flow chart of multi-flexible-
body system collaborative simulation is shown in
Figure 1:
Figure 1: The flowchart of multi-flexible-body model
cooperation simulation.
2.1 The Establishment of Solid Model
of Parallel Robot
Because of this low-DOF parallel robot having
complex structure, while in the ADAMS modeling
of complex shape parts is not powerful enough,
when establishing robot models, in this paper, three-
dimensional CAD software SOLIDWORKS is
applied, because it has a seamless connection
between ADAMS and SOLIDWORKS. Therefore,
the function of model conversion between them is
used in this paper, in that the robot's three-
dimensional model is first imported into the
ADAMS, creating a virtual prototype model of the
robot. Obtained multi-body dynamics model of the
parallel robot in ADAMS through proper handling is
shown in Figure 2:
Figure 2: The multi-body model of parallel robot in
ADAMS.
2.2 Generation of Modal Neutral File
The principle of creating flexible multi-body
dynamics is applied for components for slender and
with lower stiffness generate flexible body parts,
while for large rigidity parts rigid body model can be
used. Therefore, only three flexible telescopic arms
were processed with flexibility and the other
components are rigid body. After the multi-body
dynamic model of the parallel robot is established in
the ADAMS, the telescopic arms of parallel robot is
needed to make discretization processing of finite
element in finite element software ANSYS, in order
to generate modal neutral document for multi-
flexible-body dynamics analysis purposes.
First, the telescopic arms parts of parallel robot
in three-dimensional solid software is saved solely to
generate Parasolid model neutral file, and then
ANSYS through a dedicated interface to read the
neutral file, the definition of units, real constant, and
materials etc. is completed. The divided cell grid, the
definition of the external nodes, before outputting
MNF-neutral file, must carry out quality, and load
etc. inspection operation to ensure that the reliability
of data is contained by the file of modal neutral file
of flexible telescopic arms in the ANSYS. After
meshing, finite element model of telescopic arms is
generated, which is shown in the following figure 3.
2.3 The Establishment of Flexible
Multi-body Dynamic Model
After parallel robot modal neutral file is established,
ADAMS / Flex Module is embedded in the
ADAMS. Through the Flex body to rigid dialog box
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
322
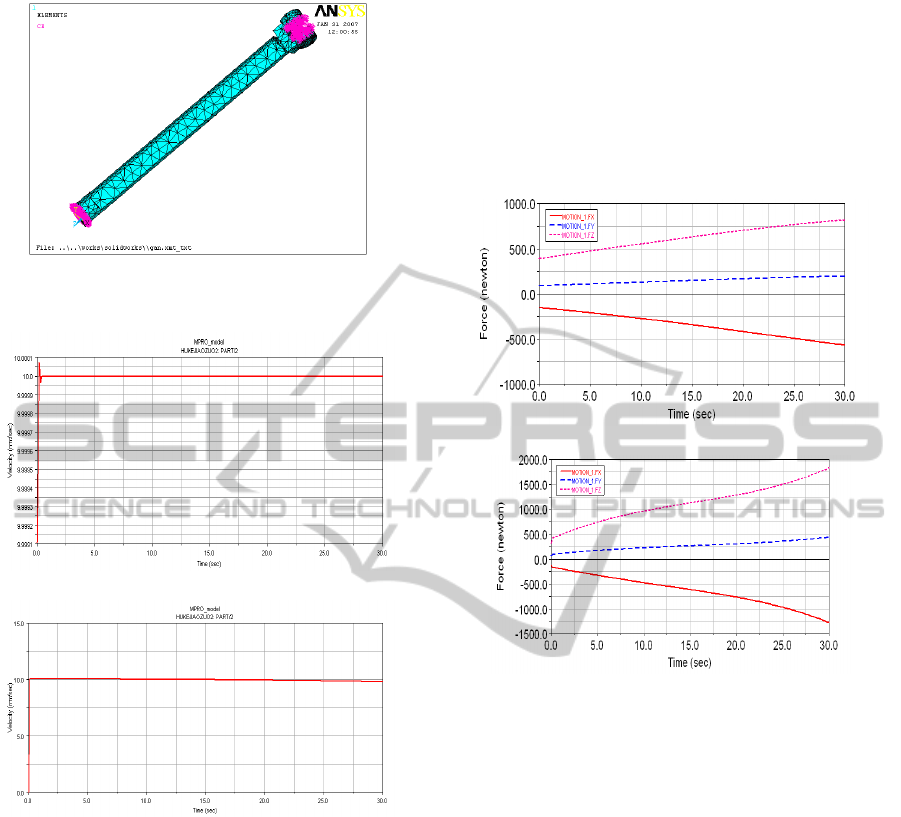
Figure 3: The finite element model of mechanical arm in
ANSYS.
(a) The end effector velocity diagram of multi-rigid-body.
(b) The end effector velocity diagram of multi-flexible-body.
Figure 4: The end effector velocity comparison of multi-
rigid-body and multi-flexible-body.
under this module, the flexible body model is
imported into the ADAMS to replace the original
rigid body, thus parallel robot flexible multi-body
simulation model is obtained, and then through
model checking, multi-flexible-body dynamic
analysis can be carried out.
3 SIMULATION RESULTS AND
ANALYSIS
In order to carry out parallel robot dynamics
simulation analysis, 1000N acting force is applied
on the end effecter of built parallel robot along the X
negative direction, and dynamic characteristic curve
of multi-rigid-body model is compared with
dynamic characteristic curve of multi-flexible-body
in this paper. The comparison of end effector
velocity of multi-rigid-body and multi-flexible-body
is shown in figure 4. The contrast between force
curves of rigid and flexible driven link is shown in
Fig. 5.
(a) The rigid body.
(b) The flexible body.
Figure 5: The component force contrast between rigid and
flexible driven link along three direction.
From the above figures of the simulation results
we can see that: (1) Due to the existence of
mechanism clearance, Multi-rigid-body model has
vibration phenomenon before movement speed is
constant, while multi-flexible-body model reduces
the vibration due to the deformation of flexible
body, making the change of the speed more smooth.;
(2) The stress variation amplitude of rigid arm is
smaller and with good linearity, while the stress
variation amplitude of flexible arm is larger and
shows a highly nonlinear.
4 CONCLUSIONS
The motion characteristics of parallel robot flexible
multi-body system is studied based on co-modeling
ideas. In this paper, the combination of the finite
element software ANSYS and multi-body analysis
software ADAMS are successfully utilized for
COOPERATIVE MODELING AND DYNAMICS SIMULATION OF FLEXIBLE MULTI-BODY SYSTEM FOR
PARALLEL ROBOT
323

simulation. analysis of the parallel robot flexible
multi-body system. We have found that using
ADAMS and ANSYS co-simulation analysis of the
flexible system, the actual motion characteristics of
flexible system can be more realistically and
accurately. Since simulation model is easy to learn
with component flexibility, it is easy to observe the
deformation of the components, predict system
performance with more accuracy, and therefore this
method offers reference for improving and
optimizing the structure of parallel robot. Some
components of the system considered as flexible
body and assembled together with other components
to build dynamic analysis model of rigid-flexible
coupling is a worthful method for the field of
parallel robot research.
REFERENCES
Fattah, A., Angeles, J., Misra, A, K., 1995. Dynamics of a
3-DOF spatial parallel manipulator with flexible links.
Proceeding of the IEEE International Conference on
Robotics & Automation. 627-632.
Gamarra-Rosado, V, O., Yuhara, E, A, O., 1999. Dynamic
modeling and simulation of a flexible robotic
manipulator. Jounal of Robotics, 17(5): 523-528.
Chen, W., 2001, Dynamic modeling of multi-link flexible
robotic manipulators. Jounal of Computers and
Structures, 79(2): 183-195.
Zhong, Xin., Yang, Ru-qing., Xu, Zheng-fei., et al. 2002.
Dynamic Modeling of Multi-Flexible System-Theory
and Application. Jounal of Mechanical Science and
Technology, 21(5): 387-389.
Wang, Yuan-feng., Shui, Xiao-ping., 2006. Analysis of
ADAMS flexible body and application of solar array
deployment. Jounal of Machinery Design &
Manufacture, (9): 146-148.
Wang, Dan., Guo, Hui., Sun, Zhi-li., 2005. Normal and
Inverse Pose Solutions to 3-RPS Parallel Robot Based
on ADAMS. Journal of Northeastern University,
26(12): 1185-1187.
Fattah, A., Angeles, J., Misra, A, K., 1995. Dynamics of a
3-DOF spatial parallel manipulator with flexible links.
Proceeding of the IEEE International Conference on
Robotics & Automatio: 627-632.
Gamarra-Rosado, V, O., Yuhara, E, A, O., 1999. Dynamic
modeling and simulation of a flexible robotic
manipulator. Jounal of Robotics, 17(5): 523-528.
Chen, W., 2001. Dynamic modeling of multi-link flexible
robotic manipulators. Jounal of Computers and
Structures, 79(2): 183-195.
Zhong, Xin., Yang, Ru-qing., Xu, Zheng-fei., et al. 2002.
Dynamic Modeling of Multi-Flexible System-Theory
and Application. Jounal of Mechanical Science and
Technology, 21(5): 387-389.
Wang, Yuan-feng., Shui, Xiao-ping., 2006. Analysis of
ADAMS flexible body and application of solar array
deployment. Jounal of Machinery Design &
Manufacture, (9): 146-148.
Wang, Dan., Guo, Hui., Sun, Zhi-li., 2005. Normal and
Inverse Pose Solutions to 3-RPS Parallel Robot Based
on ADAMS. Journal of Northeastern University,
26(12): 1185-1187.
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
324
