
PARALLELIZATION OF A MATHEMATICAL MODEL
TO EVALUATE A CCA APPLICATION FOR VANETS
Roc´ıo Murcia-Hern´andez, Carolina Garc´ıa-Costa, Juan Bautista Tom´as-Gabarr´on,
Esteban Egea-L´opez and Joan Garc´ıa-Haro
Department of Information and Communications Technologies, Technical University of Cartagena (UPCT)
Plaza del Hospital 1, Cartagena, Spain
Keywords:
OpenMP, VANET, Supercomputing, Cooperative/Chain collision avoidance application.
Abstract:
Vehicular Ad-hoc Networks (VANET) are currently becoming not only an extremely important factor for
vehicles engineering development but also a key issue for improving road safety. Cooperative/Chain Collision
Avoidance (CCA) application comes up as a solution for decreasing accidents on the road, therefore it is
highly convenient to study how the system of vehicles in a platoon will behave at different stages of technology
deployment until full penetration in the market. We have developed an analytical model to compute the average
number of accidents in a platoon of vehicles. However, due to the model structure, when the CCA technology
penetration rate is taken into account, the increase in the number of operations of the analytical model is such
that the sequential computation of a numerical solution is no longer feasible. In this paper, with the goal in
mind of reducing computation time, we show how we have implemented and parallelized our analytical model
so as a solution can be achieved, what is conducted using the OpenMP parallelization techniques under a
supercomputing shared memory environment.
1 INTRODUCTION
Vehicular networks, also known as VANETs, are de-
fined as ad-hoc mobile networks with two main com-
munication features. On the one hand, VANETs are
in charge of transmitting information among vehi-
cles (V2V communications). In this first case, cars
carry out the information interchange without any in-
frastructure support for regulating the access. On
the other hand, an intercommunication among vehi-
cles and infrastructures also exists (V2I communica-
tions), making possible a connection through cars and
a backbone network, reaching in this way those vehic-
ular entities allocated out of the direct communication
range.
One of the aims of vehicular networks develop-
ment is the improvement of road safety. The main
goal of these innovative systems is to provide drivers
a better knowledge about road conditions, decreas-
ing the number of accidents and their severity, and si-
multaneously aiding to a more comfortable and fluent
driving. Other vehicular applications are also consid-
ered, such as Internet access, driving cooperation and
public information services support.
A Cooperative/Chain Collision Avoidance (CCA)
application (Tomas-Gabarron et al., 2010) uses
VANET communications for warning drivers and de-
creasing the number of traffic accidents. CCA takes
advantage of vehicles with cooperative communica-
tion skills, in a way that these cars are able to react to
possible accident risks or emergence situations. The
CCA mechanism generates an encapsulated notifica-
tion which is sent as a message through a one-hop
communication scheme to all vehicles within a po-
tential danger coverage (relay schemes are also pos-
sible). It should be noted that the establishment of
this VANET application will be deployed gradually,
equipping vehicles with the proper hardware and soft-
ware so as they can communicate in an effective way
within the vehicular environment.
In our research we consider a platoon (or chain)
of N vehicles following a leading one, where each ve-
hicle C
i
, i ∈ 1. .. N, moves at constant velocity. The
leading vehicle, C
0
, stops instantly and the following
vehicles start to brake when they are aware of the risk
of collision, because of a warning message reception
or the perception of a reduction in the speed of the ve-
hicle immediately ahead. To test the worst case situ-
5
Murcia-Hernández R., García-Costa C., Bautista Tomás-Gabarrón J., Egea-López E. and García-Haro J..
PARALLELIZATION OF A MATHEMATICAL MODEL TO EVALUATE A CCA APPLICATION FOR VANETS.
DOI: 10.5220/0003570000050013
In Proceedings of 1st International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH-2011), pages
5-13
ISBN: 978-989-8425-78-2
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

ation, vehicles cannot change lane or perform evasive
maneuvers.
We have developed a first approach mathemati-
cal model to calculate the average percentage of ac-
cidents in the platoon, varying the number of consid-
ered vehicles, their average speed, the average inter-
vehicle spacing and the penetration ratio of the CCA
technology. Specifically when the CCA penetration
ratio is taken into account, the growth in the num-
ber of operations of the analytical model is such that
the sequential computation of a numerical solution is
no longer feasible. Consequently, we resort to the
use of parallelization techniques such as OpenMP for
solving those computational cases considered as un-
approachable by means of sequential procedures.
Additionally, we execute our programs in the Ben-
Arabi Supercomputingenvironment(FPCMur, 2011),
taking the advantage of utilizing the fourth fastest Su-
percomputer in Spain.
In the current work we show how the paralleliza-
tion techniques coordinated with supercomputing re-
sources make the simulation process a more suitable
and efficient one, therefore we succeed to evaluate the
CCA application thoroughly.
The remainder of this paper is organized as fol-
lows. In Section 2 we briefly review the related work.
In Section 3 the OpenMP environment is briefly re-
viewed and the Ben-Arabi Supercomputer architec-
ture introduced. A description of the mathematical
model, its implementation and parallelization are pro-
vided in Sections 4 and 5. Finally, some results are
shown and discussed in Section 6 to illustrate the per-
formance of the resulting parallel algorithm. Conclu-
sions and future work are remarked in Section 7.
2 RELATED WORK
So far, most typical high performance computing
(HPC) problems focused either on those fields related
with the Grand Challenges defined as fundamental
problems in science and engineering or directed to-
ward Web search databases (Barney, 2010). That is
the reason why we consider our VANET mathemati-
cal model approximationas a non-classical issue to be
solved under HPC conditions, contributing to extend
the use of supercomputing to other fields of interest.
In the implementation of our mathematical model
we parallelize a sparse matrix-vector multiplication.
This operation is considered as a relevant compu-
tational kernel in scientific applications, which per-
forms not optimally on modern processors because of
the lack of compromise between memory and com-
puting power and irregular memory access patterns
(Liu et al., 2009). In general, we find quite a lot of
done work in the field of sparse matrix-vector mul-
tiplications using parallelization techniques (Kotake-
mori et al., 2008; Goumas et al., 2009; Williams et al.,
2009). These papers study in depth the optimal per-
formance of this operation, but in this paper, we show
that even using a simpler parallelization routine, the
computation time is noticeably shortened.
Several mathematical models have been devel-
oped to study different aspects of VANETs. Most
of them are related with the vehicle routing optimiza-
tion (Ning et al., 2009; Wisitpongphan et al., 2007),
the broadcasting methods (Du et al., 2009; Fasolo
et al., 2006; Li et al., 2010), the mobility of vehicles
(Harri et al., 2009; Djenouri et al., 2008) and the com-
munication delay time (Abboud and Zhuang, 2009;
Fukuyama, 2009; Prasanth et al., 2009). Other re-
lated VANET issues have been studied as well, like
network connectivity (Khabazian and Mehmet Ali,
2008), or survivability (Xie and Xiao, 2008). In this
paper we focus on collision models for a chain of ve-
hicles, particularly those based on physical parame-
ters to assess the collision process itself (Glimm and
Fenton, 1980; Touran and Brackstone, 1999; Kim and
Jeong, 2010).
However in an attempt of searching related work
we find that few work has been done specifically re-
garding to the parallelization of these VANET math-
ematical models, strictly speaking. Moreover, to the
best of our knowledge, only the vehicle routing prob-
lem has been approached using parallelization tech-
niques (Cook and Rich, 1999; Ghiani and Guerriero,
2003; Bouthillier and Crainic, 2005).
Therefore and summing up, in this paper we de-
scribe a preliminary model (although computation-
ally expensive) for a CCA application to compute the
number of chain collisions and to address the bene-
fits of using parallelization techniques in the VANET
arena.
3 SUPPORTING TOOLS
3.1 The OpenMP Technique
OpenMP is a well-known open standard for providing
parallelization mechanisms to multiprocessors with
shared memory (Chandra et al., 2001). OpenMP
API supports shared memory programming, multi-
platform techniques for the programming languages
like Fortran, C and C++, and for every architecture
including Unix and Windows platforms. OpenMP is
a scalable and portable model developed for hardware
and software distributors which provides shared me-
SIMULTECH 2011 - 1st International Conference on Simulation and Modeling Methodologies, Technologies and
Applications
6

mory programmers with a simple and flexible inter-
face for parallel applications developing which can
run not only in a personal computer but also in a su-
percomputer.
OpenMP uses the parallel paradigm known as
fork-join with the generation of multiple threads,
where a heavy computational task is divided into k
threads (forks) with less weight and afterwards it col-
lects their results and combines them at the end of the
execution in a single result (join).
The master thread runs sequentially till it finds an
OpenMP guideline and since this moment a bifurca-
tion is generated with the correspondingslave threads.
These threads can be distributed and executed in dif-
ferent processors, decreasing this way the execution
time.
3.2 The Ben-Arabi Supercomputer
Our model is executed under the Ben-Arabi super-
computer resources, which is placed in the Scientific
Park of Murcia (Spain). The Ben-Arabi system con-
sists of two different architectures; on the one hand
the central node HP Integrity Superdome SX2000
with 128 cores of the Intel Itanium-2 dual-core Mont-
vale (1.6 Ghz, 18 MB of cache L3) processor and 1.5
TB of shared memory, called Ben. On the other hand,
Arabi is a cluster consisting of 102 nodes, which of-
fers a total of 816 Intel Xeon Quad-Core E5450 (3
GHz y 6 MB of cache L2) processor cores and a total
of 1072 GB of shared memory.
We run our mathematical model within a node of
the Arabi cluster environment using 2, 4 and 8 pro-
cessors respectively to compare the different execu-
tion times results. Taking into account that we are
not allowed to combine the usage of processors from
different nodes, since we are using a shared memory
parallelization technique.
Next we summarize the cluster technical features:
• Capacity: 9.72 Tflops.
• Processor: Intel Xeon Quad-Core E5450.
• Nodes number: 102.
• Processors number: 816.
• Processors/Node: 8.
• Memory/Node: 32 nodes of 16 GB and 70 of 8
GB.
• Memory/Core: 3 MB (6 MB shared among 2
cores).
• Clock frequency: 3 Ghz.
p
N
1− p
N
p
N
1− p
N
p
N
S
0,2
1− p
N
S
0,N
S
N,0
S
N−1,1
S
1,N−1
S
2,0
S
1,1
p
2
p
2
1− p
2
1− p
2
S
1,0
S
0,1
p
1
1− p
1
S
0,0
Figure 1: Probability tree that defines the model. S
i, j
rep-
resents the state with i collided vehicles and j successfully
stopped vehicles.
4 MODEL DESCRIPTION
We are interested in evaluating the performance of
a CCA application for a chain of N vehicles when
the technology penetration rate is not 100%. Vehi-
cles drive in convoy, reacting to the first collision of
another car according to two possible schemes: start-
ing to brake because of a previously received warning
message transmited by a collided vehicle (if the vehi-
cle is equipped with CCA technology) or starting to
decelerate after noticing a reduction in the speed of
the vehicle immediately ahead (if the vehicle under
consideration is not equipped with CCA technology).
With this model the final outcome of a vehicle
depends on the outcome of the preceding vehicles.
Therefore, the collision model is based on the con-
struction of the following probability tree. We con-
sider an initial state in which no vehicle has collided.
Once the danger of collision has been detected, the
first vehicle in the chain C
1
(immediately after the
leading one) may collide or stop successfully. From
both of these states two possible cases spring as well,
that is either the following vehicle in the chainC
2
may
collide or stop successfully. And so on until the last
vehicle in the chain. At the last level of the tree we
have N +1 possible outcomes (final outcomes) which
represent the number of collided vehicles in the chain,
that is, from 0 to N collisions (Figure 1).
The transition probability between the nodes of
the tree is the probability of collision of the corre-
sponding vehicle in the chain p
i
(or its complemen-
tary). These probabilities are calculated recursively,
regarding different kinematic parameters, as the aver-
PARALLELIZATION OF A MATHEMATICAL MODEL TO EVALUATE A CCA APPLICATION FOR VANETS
7
age velocity of the vehicles in the chain (used to com-
pute the distance to stop), the average inter-vehicle
distance and the driver’s reaction time, among others.
The exact details of this calculation are crucial for our
analytical model but they are out of the scope of this
paper. Let us remark that it is a recursive operation,
that is p
i
= f(p
i−1
), and must be done sequentially.
Let us note how every path in the tree from the
root to the leaves leads to a possible outcome involv-
ing every vehicle in the chain. The probability of a
particular path is the product of the transition proba-
bilities that belongs to the path. Since there are mul-
tiple paths that lead to the same final outcome (leaf
node in the tree), the probability of that outcome will
be the sum of the probabilities of every path reaching
it.
In order to compute the probabilities of the final
outcomes, we can construct a Markov chain whose
state diagram is shown in Figure 1 and is based on the
previously discussed probability tree. It is a homoge-
neous Markov chain with
(N+1)(N+2)
2
states,
(S
0,0
, S
1,0
, S
0,1
,. .. , S
N,0
, S
N−1,1
,. .. , S
1,N−1
, S
0,N
).
(1)
The transition matrix P of the resulting Markov chain
is a square matrix of dimension
(N+1)(N+2)
2
, which is a
sparse matrix, since from each state it is only possible
to move to two of the other subsequent states.
Then, we need to compute the probabilities of
going from the initial state to each of the N + 1 fi-
nal states in N steps, which are given by matrix P
N
.
Therefore, the final outcome probabilities are the last
N + 1 entries of the first row of the matrix P
N
.
Let Π
i
be the probability of reaching the final out-
come with i collided vehicles, that is, state S
i,N−i
. We
obtain the average of the total number of accidents in
the chain using the weighted sum:
N
acc
=
N
∑
i=0
i· Π
i
. (2)
Our purpose is to evaluate the functionality of the
CCA system depending on the current penetration
rate of this technology. So that, we have to solve the
model assuming different technology penetration ra-
tios. This assumption implies that we have to calcu-
late the number of collisions once for each of the pos-
sible combinations in the chain of vehicles equipped
with and without CCA technology, that is,
N
m
=
N!
(N − m)! m!
, (3)
where N is the total number of vehicles in the chain
and m is the number of vehicles equipped with the
CCA technology. It is worth to notice that the number
of combinations for m vehicles set with CCA technol-
ogy and N − m without it is the same that for N − m
vehicles with CCA and m without it. Therefore, in
order to analyze the computation time, we solve the
model varying the CCA penetration rate between 0%
and 50%, since the rest of cases are computationally
(but not numerically) identical. As we can see in Ta-
ble 1, the number of combinations grows quickly by
an increase on the CCA penetration rate as well as by
an increase on the number of vehicles.
Table 1: Number of combinations of N = {10,20,30} vehi-
cles with and without CCA technology.
CCA% 10 veh. 20 veh. 30 veh.
0% 1 1 1
10% 10 190 4060
20% 45 4845 593775
30% 120 38760 14307150
40% 210 125970 86493225
50% 252 184756 155117520
In addition to that, we also aim at evaluating
the impact on the number of accidents of the inter-
vehicular distance, varying this parameter (dist) in a
wide range.
5 IMPLEMENTATION
In this section we firstly introduce the algorithm for
the model implementation (Algorithm 1) and then, we
explain the method we have used to parallelize it.
Algorithm 1: Computation of the number of collisions in a
chain of vehicles.
for all comb in Combinations do
for all dist in RangeOfDistances do
for i = 1 to N do
p
i
= f(p
i−1
,comb,dist,i, veloc,reactTime)
end for
for j = 0 to N do
Π
j
= P
N
(1,
(N+1)(N+2)
2
− j)
end for
N
acc
=
N
∑
j=0
j · Π
j
end for
end for
Examining the algorithm we can make the follow-
ing observations:
1. The iterations of the for loop that covers the num-
ber of Combinations resulting from the CCA tech-
nology penetration rate are independent for each
SIMULTECH 2011 - 1st International Conference on Simulation and Modeling Methodologies, Technologies and
Applications
8
other, so they can be executed in parallel by dif-
ferent threads.
2. The same occurs with the for loop that covers the
RangeOfDistances (for the inter-vehicular spac-
ing) to be evaluated.
3. Since the collision probabilities of the vehicles in
the platoon is computed recursively, each iteration
of the for loop that considers each vehicle in the
chain needs the results of the preceding iteration,
so this loop should be executed sequentially.
4. To obtain the first row of matrix P
N
we have
to multiply a
(N+1)(N+2)
2
dimension vector by a
(N+1)(N+2)
2
×
(N+1)(N+2)
2
matrix N times. The
vector-matrix multiplication can be also paral-
lelized so that each thread executes the multipli-
cation of the vector by part of the matrix columns.
However, the N multiplications should be done
one after the other, that is, sequentially.
For the sake of clarity, we will parallelize the fol-
lowing tasks:
• A: Vector-Matrix multiplication.
• B: Average inter-vehicular distance variation.
• C: Technology penetration rate variation.
Next, we will combine the different parallelized
tasks (see Table 2) and execute the resulting programs
in order to assess the actual improvement obtained
from each one.
Table 2: Resulting programs with different parallelized
tasks. X means that the corresponding parallelization takes
place.
Program A B C
Program 1
Program 2 ×
Program 3 ×
Program 4 ×
Program 5 × ×
Program 6 × ×
Program 7 × ×
Program 8 × × ×
6 RESULTS
In this section we execute the programs as discussed
in the previous section (shown in Table 2) in a node
of the Arabi cluster using 2, 4 and 8 processors in
order to assess the improvementon the execution time
achieved by each one.
The parameters used to execute the model are the
following:
• CCA penetration rate: 0%− 50%, in 10% steps.
• Average inter-vehicular distance: 6 − 70 m, in 1
meter steps.
• Number of vehicles: 20 vehicles.
• Average velocity: 33 m/s.
• Average driver’s reaction time: 1 s.
6.1 Execution with 2 Processors
The computation times resulting from the execution
of the eight programs with the selected penetration
rates of CCA technology using 2 processors are gath-
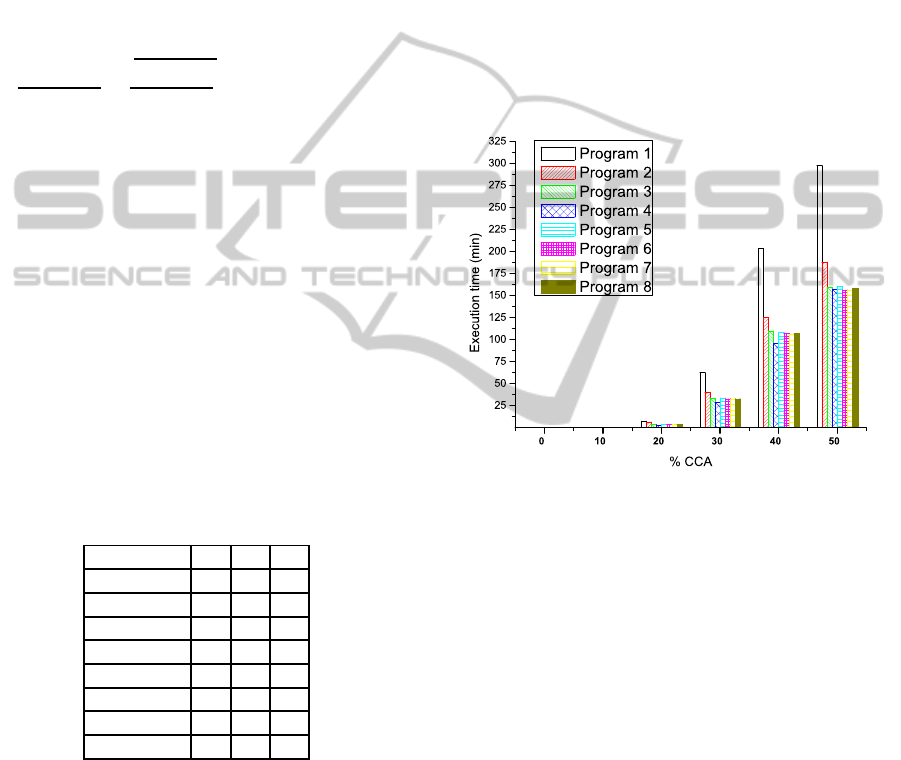
ered in Table 3 and illustrated in Figure 2.
Figure 2: Execution times in minutes for each program us-
ing 2 processors.
Now we focus on the results associated to the 50%
CCA penetration rate, since for this value we obtain
the highest number of combinations, specifically for
a chain of 20 vehicles we obtain a total of 184756
combinations. Therefore,it is for this particular pen-
etration rate case when we obtain a higher execution
time and it can be considered as the critical case in
terms of the solving time.
The sequential program (Program 1) lasts a total
of 297.975 minutes, that is approximately 5 hours of
computation. If we make a comparison among the
parallelized programs we conclude that the best result
is given by the Program 7, with a computation time
of 156.433 minutes, what implies around 2.6 hours of
calculation time. It is worth mentioning that Program
7 is built by a combination of the parallelized tasks B
and C, parallelizing the for loops that cover the range
of average inter-vehicular distances and the number
of combinations resulting from the technology pene-
tration rate respectively. We obtain thus:
PARALLELIZATION OF A MATHEMATICAL MODEL TO EVALUATE A CCA APPLICATION FOR VANETS
9
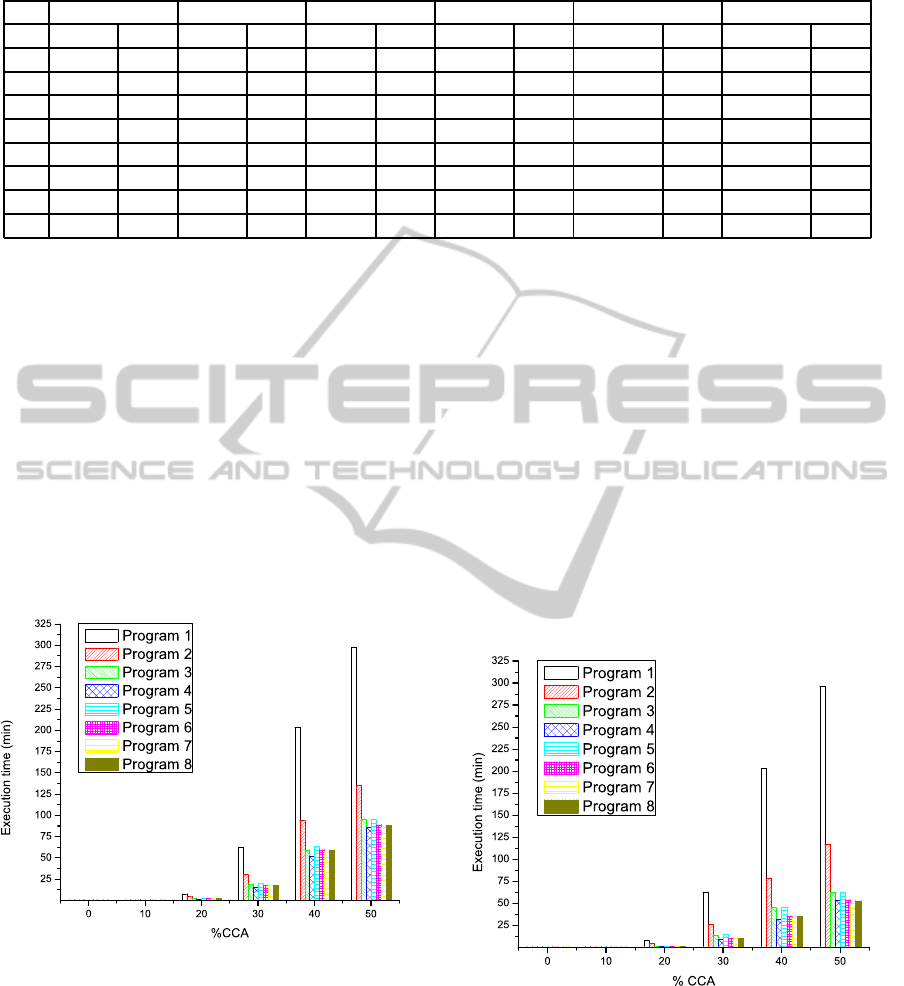
Table 3: Execution times in minutes and speedup (SU) for each program using 2 processors.
0% 10% 20% 30% 40% 50%
Time SU Time SU Time SU Time SU Time SU Time SU
P1 0.002 1.00 0.307 1.00 7.848 1.00 62.876 1.00 203.896 1.00 297.975 1.00
P2 0.002 1.00 0.247 1.24 6.694 1.17 40.693 1.54 125.658 1.62 188.396 1.58
P3 0.001 2.00 0.175 1.75 4.315 1.82 33.858 1.86 110.142 1.85 159.558 1.87
P4 0.003 0.67 0.147 2.09 3.655 2.15 29.323 2.14 95.671 2.13 157.483 1.90
P5 0.001 2.00 0.173 1.77 4.326 1.81 34.208 1.84 108.542 1.88 161.026 1.85
P6 0.004 0.50 0.167 1.84 4.227 1.86 33.009 1.90 107.534 1.90 156.688 1.90
P7 0.002 1.00 0.167 1.84 4.176 1.88 32.771 1.92 106.119 1.92 156.433 1.90
P8 0.002 1.00 0.168 1.83 4.226 1.86 32.962 1.91 107.422 1.90 158.509 1.88
• Sequential time (P1): 297.975 minutes.
• Parallel time (P7): 156.433 minutes.
The achieved speedup (P1/P7) is 1.9, which im-
plies an improvement of around 47.5% referred to the
execution time.
6.2 Execution with 4 Processors
The computation times resulting from the execution
of the eight programs with the selected penetration
rates of CCA technology using 4 processors are pre-
sented in Table 4 and depicted in Figure 3.
Figure 3: Execution times in minutes for each program us-
ing 4 processors.
When the CCA penetration rate equals the 50%
we reach the highest computational load. So we also
analyze the results with this penetration rate using 4
processors, focusing on the best and worst execution
times achieved. The reference is still the sequential
Program 1 with a duration of 297.93 minutes (around
5 hours). If we make a comparison among the par-
allelized programs we conclude that the best result is
given again by the Program 7 with a calculation time
of 85.988 minutes (around 1.43 hours). We obtain
thus:
• Sequential time (P1): 297.93 minutes.
• Parallel time (P7): 85.988 minutes.
The achieved speedup is 3.46, which implies an
improvement of around 71.1% referred to the execu-
tion time.
6.3 Execution with 8 Processors
The computation times resulting from the execution
of the eight programs with the selected penetration
rates of CCA technology using 8 processors are gath-
ered in Table 5 and illustrated in Figure 4.
Figure 4: Execution times in minutes for each program us-
ing 8 processors.
Finally we analyze what happens if we use 8 pro-
cessors to solve the problem. Once more, we obtain
for the parallelized Program 7 the least computation
time, 50.402 minutes with a 50% CCA penetration
rate. So if we compare this result with the execution
time of the sequential program we obtain an improve-
ment of the 83%, that is, a speedup factor of 5.89.
SIMULTECH 2011 - 1st International Conference on Simulation and Modeling Methodologies, Technologies and
Applications
10
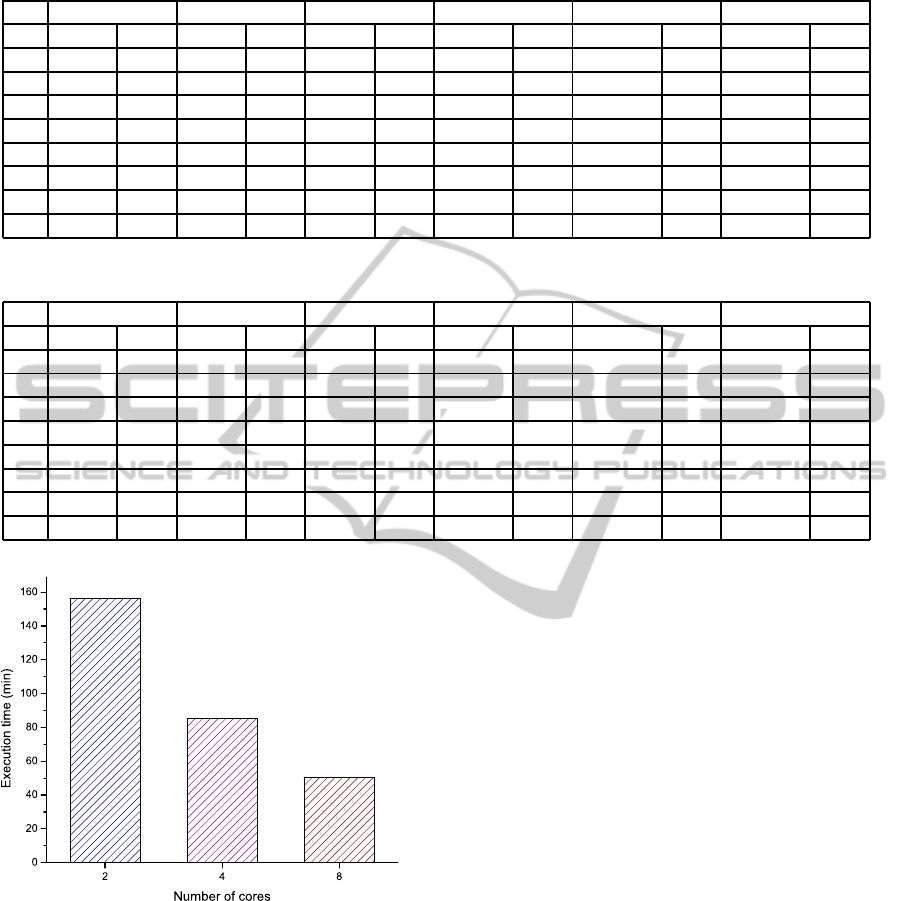
Table 4: Execution times in minutes and speedup for each program using 4 processors.
0% 10% 20% 30% 40% 50%
Time SU Time SU Time SU Time SU Time SU Time SU
P1 0.002 1.00 0.308 1.00 7.838 1.00 62.653 1.00 203.757 1.00 297.930 1.00
P2 0.001 2.00 0.199 1.55 5.053 1.55 30.676 2.04 94.173 2.16 135.907 2.19
P3 0.001 2.00 0.098 3.14 2.473 3.17 19.488 3.21 59.724 3.41 95.360 3.12
P4 0.004 0.50 0.078 3.95 1.998 3.92 16.072 3.90 51.830 3.93 86.175 3.45
P5 0.002 1.00 0.101 3.05 2.494 3.14 19.933 3.14 63.464 3.21 95.158 3.13
P6 0.005 0.40 0.091 3.38 2.251 3.48 18.013 3.48 59.810 3.40 89.064 3.34
P7 0.004 0.50 0.089 3.46 2.232 3.51 17.754 3.53 57.699 3.53 85.988 3.46
P8 0.003 0.67 0.090 3.42 2.245 3.49 17.926 3.49 59.453 3.43 88.422 3.37
Table 5: Execution times in minutes and speedup for each program using 8 processors.
0% 10% 20% 30% 40% 50%
Time SU Time SU Time SU Time SU Time SU Time SU
P1 0.002 1.00 0.308 1.00 7.844 1.00 62.695 1.00 203.416 1.00 296.691 1.00
P2 0.003 0.67 0.193 1.59 4.610 1.70 26.578 2.36 78.644 2.58 117.415 2.53
P3 0.001 2.00 0.067 4.60 1.767 4.44 13.634 4.60 45.213 4.50 62.572 4.74
P4 0.008 0.25 0.047 6.55 1.155 6.79 9.310 6.73 32.142 6.33 54.165 5.48
P5 0.002 1.00 0.071 4.34 1.739 4.51 15.125 4.14 45.858 4.43 62.572 4.74
P6 0.005 0.40 0.055 5.60 1.258 6.23 10.158 6.17 35.275 5.76 54.006 5.49
P7 0.008 0.25 0.054 5.70 1.232 6.37 10.041 6.24 34.800 5.84 50.402 5.89
P8 0.007 0.28 0.051 6.04 1.248 6.28 10.143 6.18 35.376 5.75 53.031 5.59
Figure 5: Execution times for Program 7 with 50% of CCA
penetration rate using 2, 4 and 8 processors.
6.4 Results Discussion
In conclusion, on the one hand, we have achieved
an improvement of 83% in the computation time of
the most complex case, what can be considered as a
pretty much outstanding improvement. On the other
hand, if we compare the best execution times be-
tween the two technical extremes under study, that is
the use of 2 or 8 processors belonging to the shared
nodes architecture in the Arabi cluster, we reach to an
improvement of 67.78%, which implies an upwards
trend with increasing the number of processors, as
expected. Moreover, we can observe that those pro-
grams including the parallelization of task C, which
implies an acceleration on the loop varying the CCA
penetration rate, are the fastest ones. Nevertheless,
the results obtained from Program 2 show that the
improvement achieved parallelizing only the vector-
matrix multiplication (task A) is already significant,
reaching 60.4% using 8 processors.
Analyzing the speedup for programs 7 and 8 it
surprises that P7, with two paralellized tasks, wins
P8 including one more task. But this is a common
fact in parallel computing due to load balancing and
synchronization overhead (OpenMP, 2011). This ex-
plains also that all programs including parallelized
task C have similar execution times, since this is
the heaviest computational task and outshines the im-
provement derivedfrom the A and B tasks paralleliza-
tion.
Let us compare now the obtained results for the
Program 7, the one with the best execution times,
centering on the 50% CCA penetration rate, since as
we already mentioned, this is the heaviest option in
terms of computational load. These results are de-
picted in Figure 5. We find out an inverse relationship
between computation time and the number of proces-
sors in use, since when we duplicate the number of
PARALLELIZATION OF A MATHEMATICAL MODEL TO EVALUATE A CCA APPLICATION FOR VANETS
11
processors the execution time of Program 7 is reduced
almost to a half. Specifically, the speedup achieved
passing from 2 to 4 processors is 1.82, and from 4 to
8 processors, 1.7. However, this speedup is limited
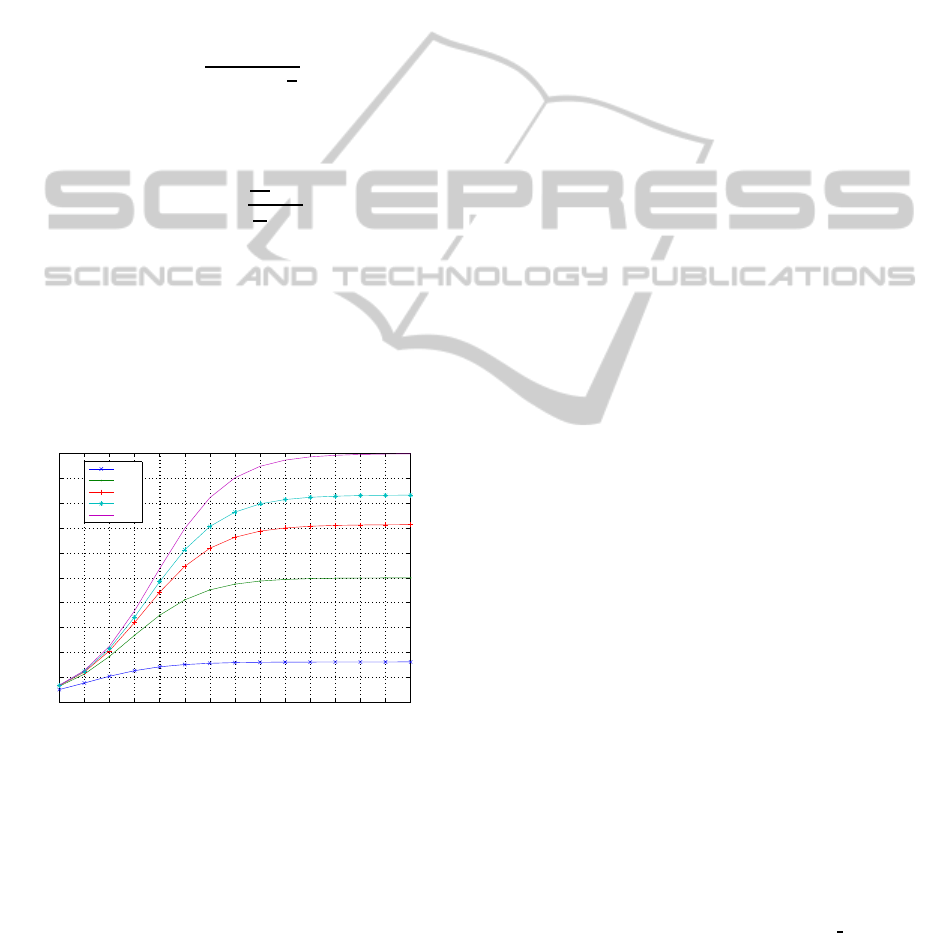
according to Amdahl’s law (Amdahl, 1967). We have
calculated for each program the theoretical speedup
obtained from this law, as depicted in Figure 6.
Amdahl’s law states that if α is the proportion of
a program that can be made parallel then the maxi-
mum speedup, SU, that can be achieved by using n
processors is:
SU =
1
(1− α) +
α
n
. (4)
We can estimate α by using the measured speedup
SU on a specific number of processors sn as follows:
α
estimated
=
1
SU
− 1
1
sn
− 1
. (5)
The results show that for Program 2 the speedup
obtained with 8 processors is almost the limit for it,
but the speedup for Program 7 can still grow up to 20,
which implies reducing the executiontime to less than
15 minutes. So, as future work, we will try to execute
our programs with a higher amount of processors in
order to evaluate the system involving a more number
of vehicles.
1 2 4 8 16 32 64 128 256 512 1024 2048 4096 8192 16384
0
2
4
6
8
10
12
14
16
18
20
Number of Processors
Speedup
P2
P3,P5
P4,P6
P8
P7
Figure 6: Theoretical speedup limits calculated from Am-
dahl’s law.
7 CONCLUSIONS AND
OUTLOOK
Thanks to OpenMP parallelization techniques run-
ning under a supercomputing shared memory envi-
ronment we succeded to evaluate the perfomance of
a CCA application at different stages of technology
deployment. To conclude, we were able to solve a
program with an execution time of 297.975 minutes
in only 50.402 minutes.
As future work, on the one hand we will try to ex-
ecute our programs with a higher amount of proces-
sors in order to evaluate the system involving a bigger
number of vehicles. On the other hand, we aim to
deepen and improve our analytical model and study
further, within this model, the use of parallelization in
a supercomputing platform. We are also facing simi-
lar tasks to improve the efficiency of the VANET sim-
ulation environments we are using in order to validate
our mathematical analyses.
ACKNOWLEDGEMENTS
This research has been supported by the
MICINN/FEDER project grant TEC2010-21405-
C02-02/TCM (CALM) and Fundaci´on S´eneca RM
grant 00002/CS/08 FORMA. It is also developed in
the framework of “Programa de Ayudas a Grupos de
Excelencia de la Regi´on de Murcia, de la Fundaci´on
S´eneca, Agencia de Ciencia y Tecnolog´ıa de la RM”.
J. Garcia-Haro acknowledges personal grant PR2009-
0337 (MICINN/SEU/DGU Programa Nacional de
Movilidad de Recursos Humanos de Investigaci´on).
J. B. Tomas-Gabarr´on thanks the Spanish MICINN
for a FPU (REF AP2008-02244) pre-doctoral fellow-
ship. C. Garcia-Costa acknowledges the Fundaci´on
Seneca for a FPI (REF 12347/FPI/09) pre-doctoral
fellowship.Roc´ıo Murcia-Hern´andez acknowledges
the personal grant she is enjoying belonging to the
project FORMA and specially the Supercomputating
center of the Scientific Park Foundation in Murcia
(Spain).
REFERENCES
Abboud, K. and Zhuang, W. (2009). Modeling and anal-
ysis for emergency messaging delay in vehicular ad
hoc networks. In IEEE Global Telecommunications
Conference.
Amdahl, G. M. (1967). Validity of the single processor ap-
proach to achieving large scale computing capabili-
ties. In Proceedings of the spring joint computer con-
ference.
Barney, B. (2010). Introduction to parallel computing.
https://computing.llnl.gov/tutorials/parallel comp/.
Bouthillier, A. L. and Crainic, T. G. (2005). A cooperative
parallel meta-heuristic for the vehicle routing problem
with time windows. In Computers & Operations Re-
search.
SIMULTECH 2011 - 1st International Conference on Simulation and Modeling Methodologies, Technologies and
Applications
12

Chandra, R., Dagum, L., and et al. (2001). Parallel Pro-
gramming in OpenMP. Morgan Kaufmann Publish-
ers.
Cook, W. and Rich, J. L. (1999). A parallel cutting-plane
algorithm for the vehicle routing problem with time
windows. In Computational and Applied Mathematics
Rice University.
Djenouri, D., Nekka, E., and et al. (2008). Simulation of
mobility models in vehicular ad hoc networks. In Pro-
ceedings of the 2008 Ambi-Sys workshop on Software
Organisation and MonIToring of Ambient Systems.
Du, S., Liu, F. Q., and et al. (2009). On-demand power
control algorithm based on vehicle ad hoc network. In
Jisuanji Gongcheng/ Computer Engineering.
Fasolo, E., Zanella, A., and et al. (2006). An effective
broadcast scheme for alert message propagation in ve-
hicular ad hoc networks. In IEEE International Con-
ference on Communications.
FPCMur (2011). Scientific park in murcia, official web-
page. http://www.cesmu.es.
Fukuyama, J. (2009). A delay time analysis for multi-hop
v2v communications over a linear vanet. In IEEE Ve-
hicular Networking Conference.
Ghiani, G. and Guerriero, F. e. a. (2003). Real-time vehi-
cle routing: Solution concepts, algorithms and parallel
computing strategies. In European Journal of Opera-
tional Research.
Glimm, J. and Fenton, R. E. (1980). An accident-severity
analysis for a uniform-spacing headway policy. In
IEEE Transactions on Vehicular Technology.
Goumas, G., Kourtis, K., and et al. (2009). Performance
evaluation of the sparse matrix-vector multiplication
on modern architectures. In The Journal of Supercom-
puting.
Harri, J., Filali, F., and et al. (2009). Mobility models for
vehicular ad hoc networks: a survey and taxonomy. In
IEEE Communications Surveys & Tutorials.
Khabazian, M. and Mehmet Ali, M. K. (2008). A perfor-
mance modeling of connectivity in vehicular ad hoc
networks. In IEEE Transactions on Vehicular Tech-
nology.
Kim, T. and Jeong, H. Y. (2010). Crash probability and
error rates for head-on collisions based on stochastic
analyses. In IEEE Transactions on Intelligent Trans-
portation Systems.
Kotakemori, H., Hasegawa, H., and et al. (2008). Perfor-
mance evaluation of parallel sparse matrixvector prod-
ucts on sgi altix3700. In OpenMP Shared Memory
Parallel Programming. Lecture Notes in Computer
Science.
Li, L. J., Liu, H. F., and et al. (2010). Broadcasting methods
in vehicular ad hoc networks. In Ruan Jian Xue Bao
(Journal of Software).
Liu, S., Zhang, Y., and et al. (2009). Performance evaluation
of multithreaded sparse matrix-vector multiplication
using openmp. In IEEE International Conference on
High Performance Computing and Communications.
Ning, Z., Jung, Y., and et al. (2009). Route optimization for
gpsr in vanet. In IEEE International Advance Com-
puting Conference.
OpenMP (2011). Openmp, official webpage.
http://openmp.org.
Prasanth, K., Duraiswamy, K., and et al. (2009). Minimiz-
ing end-to-end delay in vehicular ad hoc network us-
ing edge node based greedy routing. In First Interna-
tional Conference on Advanced Computing.
Tomas-Gabarron, J. B., Egea-Lopez, E., and et al. (2010).
Performance evaluation of a cca application for vanets
using ieee 802.11p. In IEEE International Conference
on Communications Workshops (ICC).
Touran, A. and Brackstone, M. A. e. a. (1999). A collision
model for safety evaluation of autonomous intelligent
cruise control. In Accident Analysis and Prevention.
Williams, S., Oliker, L., and et al. (2009). Optimization of
sparse matrixvector multiplication on emerging mul-
ticore platforms. In Parallel Computing.
Wisitpongphan, N., Bai, F., and et al. (2007). On the routing
problem in disconnected vehicular ad-hoc networks.
In IEEE International Conference on Computer Com-
munications.
Xie, B. and Xiao, X. Q. e. a. (2008). Survivability model for
vehicular ad-hoc network based on markov chain. In
Jisuanji Yingyong/ Journal of Computer Applications.
PARALLELIZATION OF A MATHEMATICAL MODEL TO EVALUATE A CCA APPLICATION FOR VANETS
13
